月表地形十分复杂,包括撞击坑、月球高地、月海和风化层等,这些地形上还分布着大量直径 0.01~1 m的月岩、月坑等障碍物[1 ] .常规轮式月球车无法完全适应月表复杂地形.月球的重力加速度是地球的1/6,大气密度为地球的1/1 012,接近真空状态[2 ] .基于月面的特殊特性,同等条件下跳跃机器人在月球表面可实现更高、更远和更可控的跳跃,跳跃机器人在月面复杂地形的探测中具有巨大的应用前景.
目前,国内外学者针对月面跳跃机器人开展了一定研究.例如,李贺等[3 ] 设计了一种通过气缸储能进行跳跃的月面移动机器人,从能量角度评估了机器人的跳跃能力,但没有通过试验验证月壤上的跳跃能力.Yoshikawa等[4 ] 设计了一种通过弹簧储能进行跳跃的月面探测机器人,该跳跃机器人在地球重力下的模拟月壤上的跳跃距离为0.2~1.0 m,该研究虽然验证了机器人构型的可行性,但由于缺乏月壤对跳跃影响的研究,无法让机器人实现可控的精确跳跃,从而难以直接应用到月面探测任务中.而在主要从硬地起跳的小型跳跃机器人领域,重点是通过仿生设计与参数优化来达到跳跃性能的目标,如跳蚤[5 ] 、蝉[6 ] 、夜猴[7 ] 、弹尾虫[8 ] 等仿生跳跃形式.然而,该类机器人在松软地貌起跳研究多以试验为主,如麻省理工学院(MIT)猎豹机器人在软硬地面跳跃进行了实验数据测试[9 ] ,但微观机制上的颗粒介质力的定律并未研究透彻,因此在松软地貌上实现精准跳跃具有挑战性.
基于上述分析,探明跳跃过程中月壤力学特性对机器人的影响是实现月面上可控精确跳跃的基础.目前月面机器人与月壤力学特性相关的研究以轮-壤相互作用为主,我国学者已对月球车在月面行驶过程中车轮所受月壤的正向受力[10 ] 与侧向受力[11 ] 进行了较为充分的研究.而经典轮-壤接触模型中所考虑的杰西剪切理论与Bekker承压模型[12 ] 为准静态模型,能否直接应用于跳跃这一短暂动态过程有待进一步研究.
目前,研究月壤力学特性的方法主要有两种:① 模拟月壤试分析法.张宇等[13 -14 ] 针对不同孔隙比的CAS-1型模拟月壤进行三轴实验,得到剪切特性曲线与承载特性曲线,并定性描述了模拟月壤阻尼比的变化规律.黄晗等[15 ] 对不同密实度的JLU5型模拟月壤进行贯入阻力力学实验,得到模拟月壤的贯入特性曲线.王康等[16 ] 对CE5型模拟月壤进行触月压痕试验,通过偏最小支持向量机(LSSVM)由实验结果预测模拟月壤力学状态.田野等[17 ] 基于应力波反射法,借助霍普金森压杆试验装置,研究了模拟月壤受冲击特性.② 离散元仿真分析法.邹猛等[18 ] 采用颗粒流软件PFC 3D,设计离散元模拟三轴试验,测定了离散元月壤的剪切特性曲线与承载特性曲线.林呈祥等[19 ] 采用颗粒流软件PFC 2D研究了不同颗粒形状对离散元月壤抗剪特性的影响.黄晗等[15 ] 采用颗粒流软件EDEM,设计了离散元模拟圆锥贯入试验,研究了离散元月壤密实度与圆锥指数梯度的关系.林云成等[20 ] 采用PFC 2D,设计了足垫冲击离散元月壤的仿真试验,得到了冲击过程离散元月壤的动态变化情况.实际上,基于模拟月壤的方法难以模拟月面低重力环境,而基于离散元的方法难以模拟真实月壤颗粒的微观形态.由于跳跃过程受重力影响显著,离散元方法更加适合研究跳跃中的月壤力学特性.虽然,针对月壤力学特性种类的研究众多,但明确哪些特性在跳跃过程中起主导作用是实现月面可控跳跃的关键问题之一.
本文设计了一种新型跳跃机器人,针对机器人可控精确跳跃目标,建立机器人在月壤上跳跃的动力学模型.该动力学模型的核心是基于跳跃相关月壤力学特性,建立月壤-机器人作用机理的理论表达式.基于动力学模型设计了具有月面探测应用价值的跳跃运动规划算法,验证了动力学模型的可行性.
1 跳跃机器人结构设计
1.1 总体构型
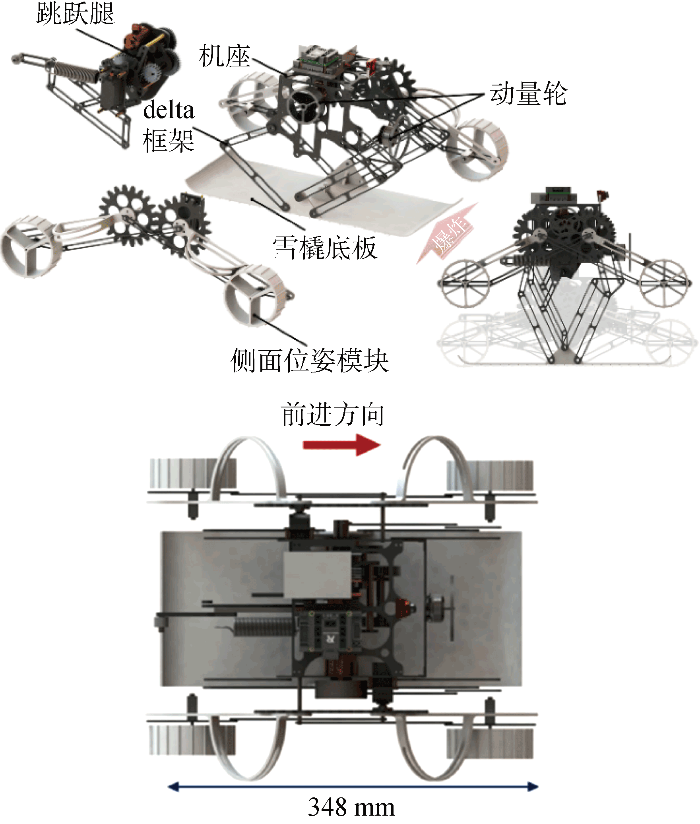
以月壤5 kPa的承载压强需求为基础指标,考虑机器人在月壤上跳跃时的下陷与滑移现象,设计一款以大面积雪橇底板式跳跃腿为核心的跳跃机器人构型,可实现起跳时月面受力较小、起跳角与起跳初速度可调的月面跳跃运动.采用雪橇板设计的主要原因在于该种方案能够将机器人起跳过程中和月壤的相互作用过程中产生的作用力进行简化,由于雪撬板底部布有平行式栅栏,所以起跳过程中雪撬板与月壤颗粒间的相互作用主要为横向滑移力和法向承载力.如图1 所示,机器人由机座、雪橇底板、跳跃腿、delta框架、侧面位姿模块和动量轮6部分构成.其中,雪橇底板底部带有梳齿结构,可减少起跳时机器人的滑移量;delta框架为被动平面二自由度结构,确保机座与雪撬板平行;侧面位姿模块由主动舵机带动双平行四边形结构,底部连杆固连主动车轮,可实现侧面主动车轮的升降.机器人总质量约为1.8 kg.
图1
图1
机器人总构型示意图
Fig.1
Schematic diagram of robot configuration
机器人在起跳前通过机座与跳跃腿间的伺服电动机改变起跳角度,控制侧面位姿模块的升降使得身体的滚转角能够自适应月壤平面的倾斜度,配合主动控制腿部伸缩带动身体升降初步踩平月壤,使得雪橇底板与月面基本贴合,跳跃腿储能释放实现跳跃;在空中通过动量轮实现滚转角与俯仰角的稳定控制,使得跳跃腿与月面的夹角达到指定的落地角度;在落地时通过跳跃腿的主动伺服电动机进行腿部的落地缓冲;需要转向时,在月面上通过侧面位姿模块的主动轮差速运动进行水平转向.
1.2 跳跃腿构型
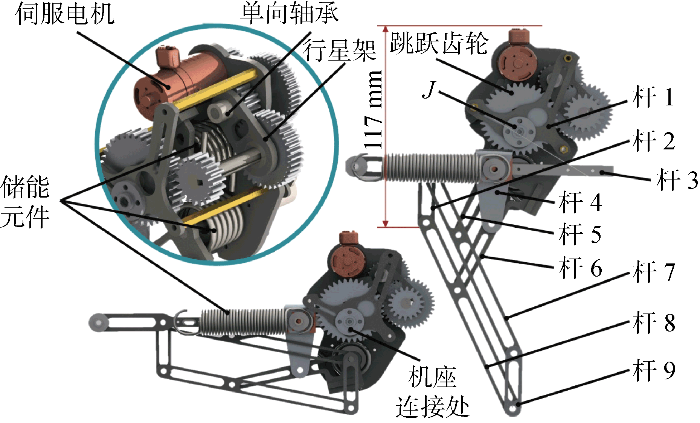
跳跃腿与机座的伺服电动机相连,腿部由主动释放装置与直线跳跃腿两部分构成,其结构如图2 所示.图中:J 关节为释放装置中跳跃齿轮与跳跃腿固连处.通过机座处伺服电动机与跳跃腿的串联实现起跳角的变化,即当舵机旋转一定角度时,跳跃腿会相对基座旋转一定的初始起跳角度.主动释放装置由伺服电动机和三组齿轮对构成,用于调整起跳初速度.压缩腿储能时,伺服电动机逆时针旋转,此时单向轴承正常转动,行星架所带动的齿轮组与最终跳跃部分的齿轮啮合,腿部实现压缩储能;腿部跳跃时,伺服电动机反转,此时由于单向轴承反向无法转动,行星架与该处的旋转轴等效固连,行星架逆时针旋转,齿轮脱离啮合,储能释放实现跳跃.通过在不同的储能条件下释放,可实现不同的起跳初速度调制.
图2
图2
跳跃腿结构示意图
Fig.2
Schematic diagram of jumping leg structure
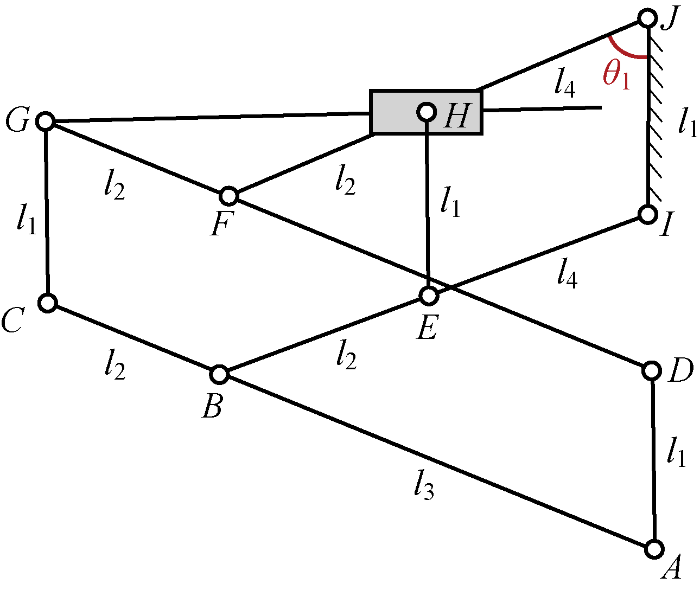
直线跳跃腿的核心设计目标是实现高伸缩比的稳定直线运动,同时实现月面近恒力的起跳.传统的单弹簧导轨滑块跳跃设计由于不同腿长下刚度发生线性变化,无法实现动力学的月面受力优化;同时纯连杆设计多为近似直线运动,且在运动时部分关节受力较大,仅适用于质量较轻的跳跃机器人.本直线跳跃腿设计将导轨滑块与直线连杆相结合,创新提出一款平面九连杆跳跃腿机构,如图3 所示.图中:A~I 关节为机构连接副;l 1 ~l 4 为连杆各部分尺寸;θ 1 为跳跃腿主动角. 该机构通过双平行四边形构型约束实现稳定的直线运动,并且具有高伸缩比的潜力. 其中,连接副由转动副与移动副构成,移动副在机械实现上选择采用微型滑轨滑块装置. 为保证直线运动轨迹的实现,l 4 需满足l 4 =l 3 -l 2 .
图3
图3
直线跳跃腿机构简图
Fig.3
Schematic diagram of straightline jumping leg mechanism
运动学设计上高伸缩比的主要原因是,起跳时月面承载的压强需要尽可能小,而在相同情况下跳跃腿在起跳过程中运动距离越大,则跳到相同高度所需的月面平均受力越小,故对月面储能跳跃而言,高伸缩比能有效降低起跳过程中月面的平均压强,从而提升机器人起跳过程的稳定性.本机构的设计优势在于若不考虑机械限制,理论腿长变化范围最大可达2l 3 ;最大伸缩比可达2l 3 /l 1 . 最终机器人的机械实现中伸缩比为2.63.
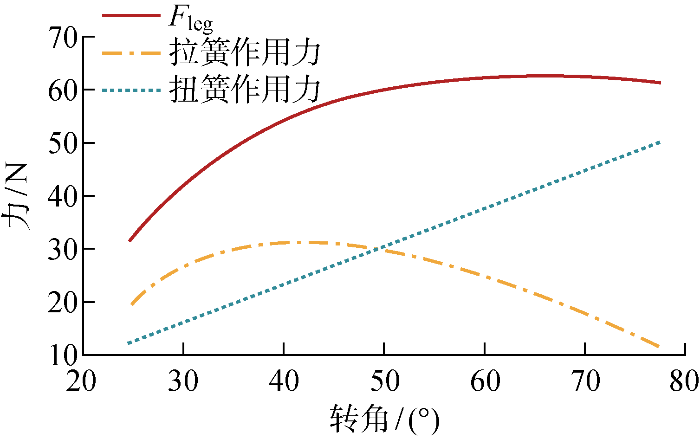
动力学设计上月面近恒力起跳的主要原因是,当起跳时月面平均压强一定时,起跳动态过程的月面峰值受力也需要尽可能小.对九杆直线跳跃腿机构采用静力学分析,若设置储能点为I 、J 关节处扭簧,G 、H 导轨处拉簧,在初步优化参数下腿上下两端的承载力F leg 与扭簧、拉簧作用力的变化关系如图4 所示,其中承载力是扭簧和拉簧两者产生的作用力的合力.可以得到,拉簧作用力与扭簧作用力随θ 1 的增大变化趋势相反,故本直线跳跃腿具有起跳时月面受力接近恒力的优化空间.
图4
图4
F leg 与扭簧拉簧作用力的关系图
Fig.4
Relationship between F leg and the force of the torsion springs and tension springs
1.3 月面起跳过程机器人多体动力学
机器人硬地起跳与月壤起跳最大的区别在于起跳过程中月壤自身的变形使得机器人跳跃底板产生运动,且月壤所能提供的支持力与月壤自身的变形状态有关.目前已有研究中从机器人本体出发的跳跃动力学模型构建主要采用能量守恒的方式,然而该方式并不适用于本研究的月壤起跳,因为机器人在月壤上起跳时,月壤的支持力由于月表的下陷变形对机器人本体做功,使得起跳过程中机器人能量并不守恒,所以基于能量守恒的方式建立机器人跳跃动力学仅适用于硬地起跳研究.
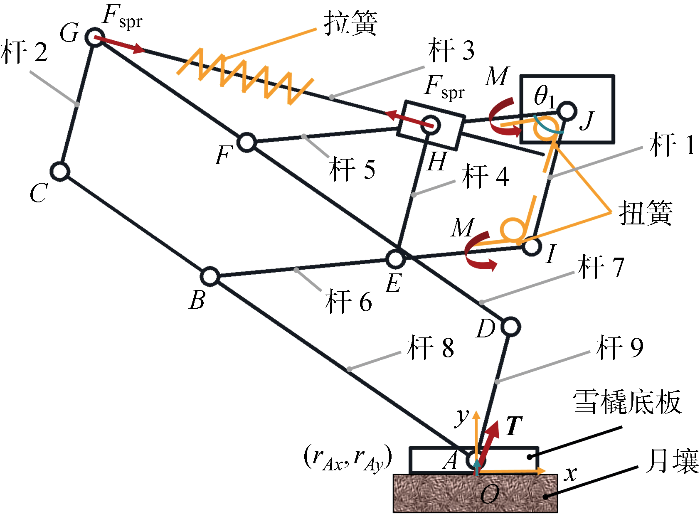
本推导过程将月壤的力学特性分解为竖直方向的承载作用力与水平方向的剪切作用力,作用点假设为雪橇底板底部中心点,从而将月壤抽象为可以计算分析的力学模型.将月壤力学模型与储能跳跃腿作为整体进行多体动力学分析,如图5 所示,其中坐标xOy 表示世界的定坐标轴,位于初始状态下雪撬板底部与月壤的接触处. 图中:F spr 为储能拉簧所产生的力;M 为储能扭簧所产生的力矩;T 为月壤对底板的作用力;rAx 与rAy 分别为点A 关于世界坐标系xOy 的x 和y 坐标.
图5
图5
月面起跳动力学模型示意图
Fig.5
Schematic diagram of the lunar take-off dynamic model
考虑到机器人本体跳跃腿的复杂性,选择基于拉格朗日方程的分析力学进行跳跃动力学模型的构建.在本动力学模型中,若起跳角给定,则跳跃腿具有跳跃过程的一个自由度;雪橇底板相对于月面会产生水平和竖直方向两个方向的位移,具有两个自由度.故定义广义坐标q 为
(1) q =$\left(\begin{array}{l}{\theta }_{1}\\ {r}_{Ax}\\ {r}_{Ay}\end{array}\right)$
随后对该模型建立运动学分析,得到各个关节与质心的位置、速度、角速度与广义坐标中各参数及其导数θ 1 ,${\stackrel{·}{\theta }}_{1}$ rAx ,${\stackrel{·}{r}}_{Ax}$ rAy ,${\stackrel{·}{r}}_{Ay}$ Ji ,Ji 满足:
(2) $\left(\begin{array}{l}{v}_{ix}\\ {v}_{iy}\\ {w}_{i}\end{array}\right)$ =Ji $\left(\begin{array}{l}{\stackrel{·}{\theta }}_{1}\\ {\stackrel{·}{r}}_{Ax}\\ {\stackrel{·}{r}}_{Ay}\end{array}\right)$ , i =1, 2, …, 9
式中:i 表示构件标号;vix 与viy 分别表示i 构件此时相对世界坐标系xOy 中x 和y 方向的质心速度;wi 表示i 构件此时的角速度.
(3) Øi =$\left[\begin{array}{ll}{m}_{i}I& 0\\ 0& {I}_{i}\end{array}\right]$
式中:mi 为i 构件的质量;Ii 为i 构件在动力学模型平面的惯量;I 为二维单位矩阵.
(4) ${\hat{\mathrm{F}}}_{\mathrm{i}}$ $\left[\begin{array}{l}{F}_{i}\\ {\mathrm{M}}_{\mathrm{i}}\end{array}\right]$
式中:Fi 与Mi 分别表示i 构件所受的外力与外力矩,方向参照式(1)中的广义坐标.
对整个系统来讲,广义力可分为T 、F spr 、M 、各个构件自身的重力Gi . 其中T 的具体表达式与月壤力学特性有关.
(5) $\stackrel{~}{Ø}\ddot{\mathrm{q}}$ $\frac{\mathrm{d}\stackrel{~}{Ø}}{\mathrm{d}t}\stackrel{·}{q}$ - $\frac{1}{2}\frac{\partial }{\partial q}\left({\stackrel{·}{q}}^{\mathrm{T}}\stackrel{~}{Ø}\stackrel{·}{q}\right)$ $\stackrel{~}{F}$
式中:$\stackrel{~}{Ø}$ $\stackrel{~}{F}$
(6) $\left.\begin{array}{l}\stackrel{~}{Ø}=\stackrel{9}{\sum _{i=1}}{{J}^{\mathrm{T}}}_{i}{Ø}_{i}{J}_{i}\\ \stackrel{~}{F}=\stackrel{9}{\sum _{i=1}}{{J}^{\mathrm{T}}}_{i}\mathrm{ }{\stackrel{~}{F}}_{i}\end{array}\right\}$
对本动力学模型进行数值求解,即可精准计算得到机器人月面起跳过程中的相关参数.
2 月壤与机器人相互作用机理
2.1 离散元模型构建
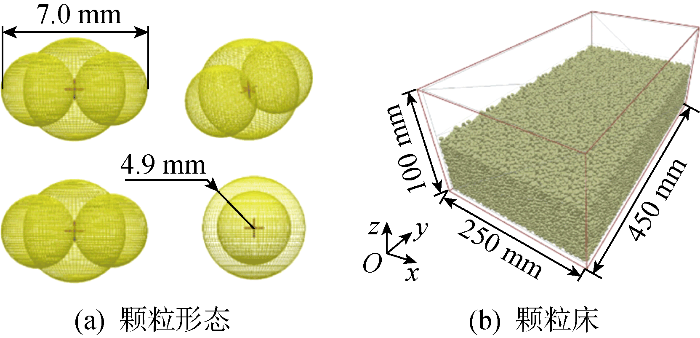
1.3 节中对月壤力学模型进行了抽象,下面将基于离散元仿真环境进一步研究跳跃过程中月壤动力学特性.如图6 所示,采用颗粒流软件EDEM构建与跳跃机器人尺寸相匹配的离散元颗粒及颗粒床.离散元颗粒基于三球模型,参考真实月壤颗粒的延性参数[11 ] 构建,受限于计算机算力,颗粒的最大直径设置为7.0 mm.颗粒床是基于长、宽、高分别为50、50、100 mm的自由堆积颗粒块,密集排列构建而成.受限于计算机算力和存储空间,离散元软件无法将颗粒床做得足够大,从而使剪切变形模量k 接近真实月壤,所以目前构建的在接下来用于跳跃实验的颗粒床,在剪切变形模量方面与真实月壤有较大差距.颗粒床越大,仿真效果与实际越接近,但考虑到仿真算力限制,将颗粒床尺寸设置为如图6 所示.
图6
图6
离散元模型
Fig.6
Discrete element model
为保证离散元颗粒床接近月球表面真实月壤,离散元环境的重力加速度设定为1.623 m/s2 ,与月面相同[1 ] ,同时颗粒床的力学特性要接近月面月壤.标定颗粒床力学特性可以基于松软地面轮-壤接触模型的剪切特性曲线[12 ] .该特性曲线可表示为
(7) $\tau=\tau_{\max }\left(1-\mathrm{e}^{-\frac{j}{k}}\right)$
(8) $\tau_{\max }=c+\sigma \tan \theta$
式中:τ ,τ max 分别为切应力和最大抗剪强度;j 为地面剪切位移;c 为内聚力;σ 为作用在地面上的正应力;θ 为内摩擦角.
测量离散元颗粒床的剪切特性参数并与月面月壤的对应参数[21 ] 进行比较,通过离散元月壤剪切特性仿真实验拟合内摩擦角和内聚力,迭代修正离散元颗粒参数,最终得到的颗粒床剪切特性参数如表1 所示,其中用于标定的真实月壤特性参考郑永春等[22 ] 基于美国苏联探月工程实验数据总结的就位月壤机械性质.
颗粒床的内聚力小于真实月壤,主要是受限于离散元颗粒形态与月壤颗粒形态的差异,包括颗粒形态与颗粒直径等相关参数.
2.2 跳跃过程月壤力学特性拓展
建立机器人在月面运动的接触模型时,一般采用的经典月壤力学特性模型.除了式(7)和式(8)所示的剪切特性模型,还有Bekker等[12 ] 提出的月壤承压特性模型,其表达式为
(9) σ =$\left(\frac{{k}_{1}}{b}+{k}_{2}\right)$ zn =Kzn
式中:b 为矩形压板的宽度;k 1 为地面的黏聚模量;k 2 为地面的摩擦模量;K 为土壤变形模量;z 为压板沉降量;n 为土壤变形指数.
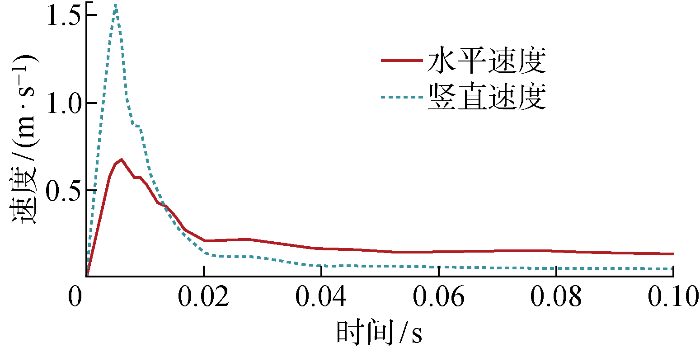
经典的月壤力学特性模型是准静态模型,适用于轮式机器人、蛇形机器人等运动平稳的机器人构型.通过在离散元环境中仿真压板在颗粒床上倾斜承压,可以大致模拟跳跃机器人触月底板在起跳时的运动情况,触月底板的运动速度如图7 所示,跳跃底板长宽与所设计的机器人保持一致,为300 mm×150 mm.
图7
图7
触月底板起跳过程速度曲线
Fig.7
Speed curves of the bottom plate in the take-off process
在非常短暂(0.1 s内)的起跳过程中,触月底板的运动速度变化明显,且速度量级超过几乎所有月面机器人的平均速度,因此机器人接触月壤的跳跃过程是一个高度动态的过程,需要在经典月壤力学特性模型的基础上引入阻尼的影响.参照Bekker承压模型的形式,可以引入如下两个动态力学特性模型,分别描述单位接触面积上的剪切阻尼和承载阻尼,其表达式分别为
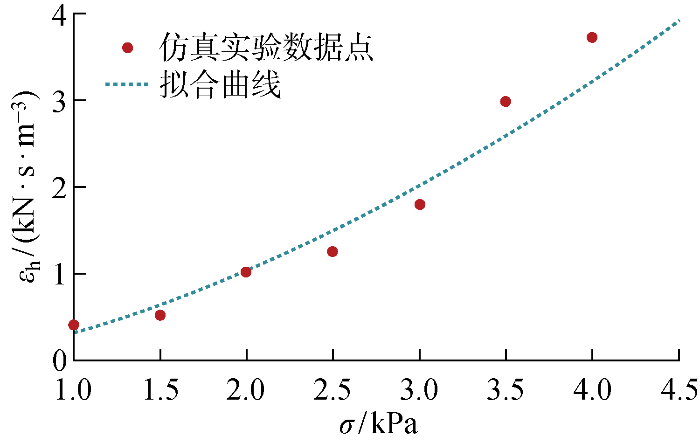
(10) $\varepsilon_{\mathrm{h}}=A_{\mathrm{h}} \sigma^{m_{\mathrm{h}}}$
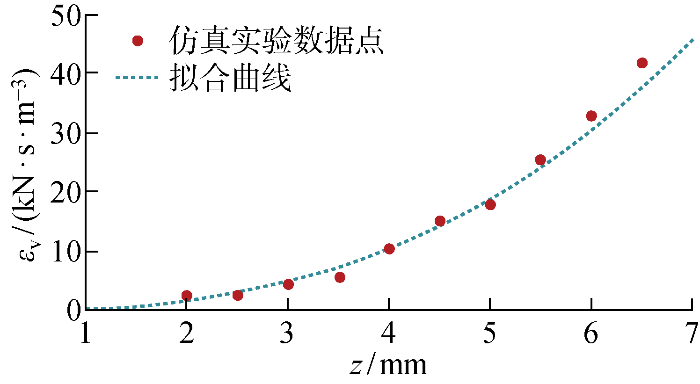
(11) $\varepsilon_{\mathrm{v}}=A_{\mathrm{v}} z^{m_{\mathrm{v}}}$
式中:ε h 为剪切过程中的阻尼强度系数,即单位面积上的剪切阻尼系数;A h 为剪切过程中的阻尼强度模量;m h 为剪切过程中的阻尼变形指数;ε v 为承载过程中的阻尼强度系数,即单位面积上的承载阻尼系数;A v 为承载过程中的阻尼强度模量;m v 为承载过程中的阻尼变形指数.
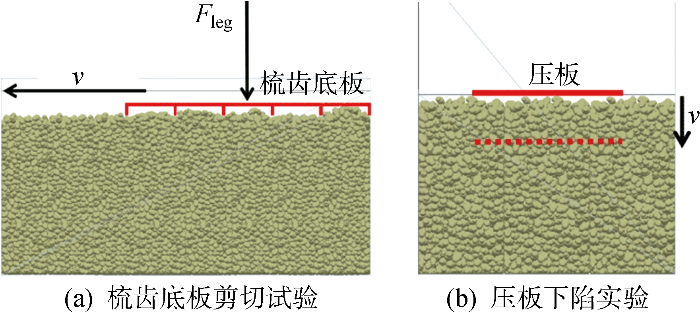
为了验证所提出动态力学特性模型的合理性,可以设计如图8 所示的离散元仿真实验进行验证.测量仿真中梳齿底板(或压板)不同运动速度v 下的受力变化,可以得到受力随运动速度的变化率,即剪切阻尼(或承载阻尼).
图8
图8
离散元仿真实验示意图
Fig.8
Schematic diagram of discrete element simulation experiment
对梳齿底板施加不同正压力,可以测得对应的剪切阻尼,转换成σ 与ε h 的映射关系后,通过式(10)进行拟合,得到图9 所示的结果.
图9
图9
剪切仿真实验拟合结果
Fig.9
Fitting results of shear simulation experiments
对压板设置不同的z ,可以测得对应的承压阻尼,转换成z 与ε v 的映射关系后,通过式(11)进行拟合,得到图10 所示的结果.
图10
图10
承载仿真实验拟合结果
Fig.10
Fitting results of bearing simulation experiments
剪切仿真实验结果的拟合度R 2 =0.957 8,承载仿真实验结果的拟合度R 2 =0.970 9.
通过仿真实验测得的离散元月壤动态力学特性参数与准静态的经典力学特性参数汇总于表2 中.
2.3 跳跃过程底板-月壤接触模型
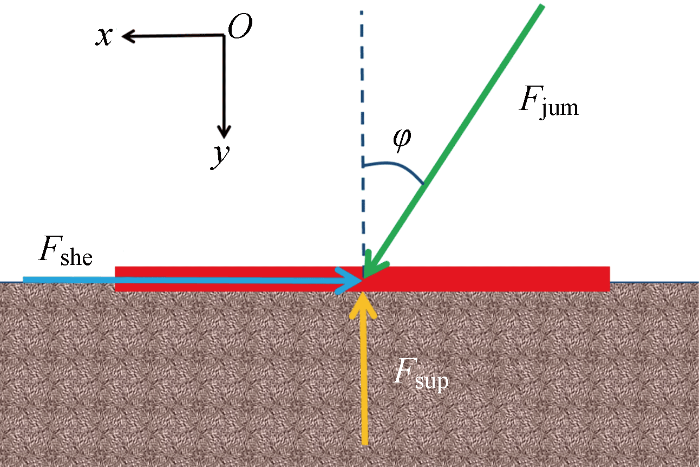
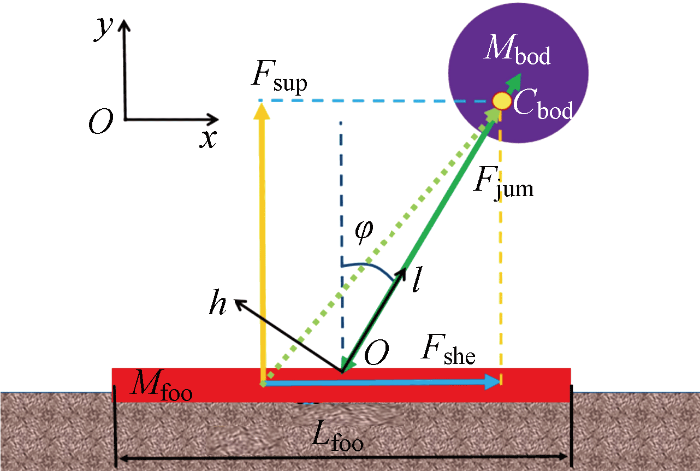
基于离散元月壤力学特性参数可以建立跳跃过程机器人的底板与月壤的接触模型.模型示意图如图11 所示.图中:F jum 表示跳跃底板受到机械的相互作用外力的总和,在跳跃机器人中就是跳跃时对底板的作用力;φ 表示F jum 与跳跃底板平面法线的夹角;F she 表示跳跃底板受到的月壤的水平剪切力,F sup 表示跳跃底板受到的月壤的竖直承载力,F she 、F sup 即T 的水平、竖直分量;x 和y 分别表示底板的水平位移和竖直位移.
图11
图11
底板-月壤接触模型
Fig.11
Contact model of the bottom plate and lunar soil
(12) $F_{\mathrm{sup}}=S_{0}\left(K y^{n}+A_{\mathrm{v}} y^{m_{\mathrm{v}}} \dot{y}\right)$
(13) $\begin{aligned}F_{\text {she }}= & S_{0}\left[c+\left(K y^{n}+A_{\mathrm{v}} y^{m_{\mathrm{v}}} \dot{y}\right) \tan \theta\right]\left(1-\mathrm{e}^{\frac{-|x|}{k}}\right)+ \\& S_{0} A_{\mathrm{h}}\left(K y^{n}+A_{\mathrm{v}} y^{m_{\mathrm{v}}} \dot{y}\right)^{m_{\mathrm{h}}} \dot{x}\end{aligned}$
(14) $\left.\begin{array}{l}{M}_{\mathrm{f}\mathrm{o}\mathrm{o}}\ddot{y}={F}_{\mathrm{j}\mathrm{u}\mathrm{m}}cos\phi -{F}_{\mathrm{s}\mathrm{u}\mathrm{p}}\\ {M}_{\mathrm{f}\mathrm{o}\mathrm{o}}\ddot{x}={F}_{\mathrm{j}\mathrm{u}\mathrm{m}}sin\phi -{F}_{\mathrm{s}\mathrm{h}\mathrm{e}}\end{array}\right\}$
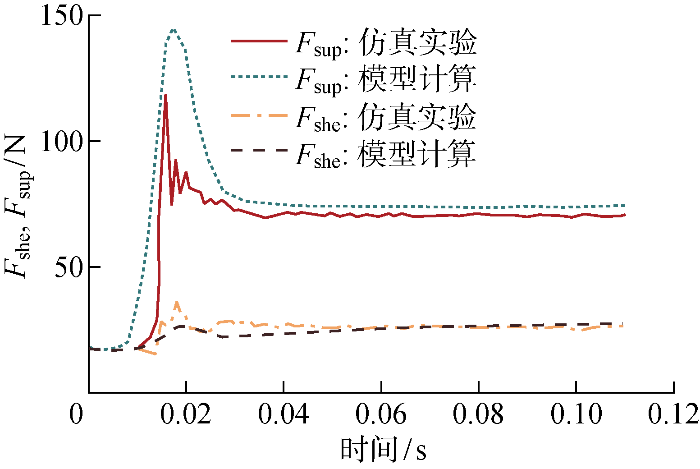
将式(12)和式(13)代入式(14),得到的动力学方程即底板-月壤接触模型.由式(12)和式(13)的表达式不难发现,底板-月壤接触模型是非线性的,可以通过龙格-库塔法求解数值解.为了便于体现模型的效果,F jum 设置为恒定 62 N(接近机器人起跳过程的平均受力),φ 设置为10°,重力忽略不计,初始边界条件均为0.底板-月壤接触模型受力的计算结果与离散元仿真实验的测定结果如图12 所示.
图12
图12
模型计算结果与仿真比较
Fig.12
Comparison of the model calculation results and simulation results
从结果来看,F she 的模型计算结果比较接近仿真结果;F sup 的模型计算结果相对于仿真结果偏大,主要原因可能是底板-月壤接触模型中没有考虑水平剪切运动对于竖直承载能力的减益影响,这一点有待未来进一步的研究.
3 月面跳跃过程机器人动力学模型
3.1 模型建立
前述内容通过研究月壤与机器人相互作用机理,得到机器人起跳过程中月壤对跳跃底板的作用力特性.在此基础上,可以建立机器人在月面跳跃过程中统一的动力学方程.为了便于讨论,首先建立双质量的月面跳跃机器人模型进行方法性验证,在此基础上建立整机的月面跳跃动力学模型.
如图13 所示,在忽略机器人跳跃腿质量的情况下,可以将跳跃机器人简化为由质量M bod 的主体和质量M foo 的底板构成的二体相互作用模型.图中:C bod 为机器人质心;L foo 为底板长度.由于底板-月壤接触模型不能描述底板巨大面积上的作用力分布,因此机器人系统所受外力的等效作用点未知.类比硬地跳跃的情况,假设T 指向C bod .基于此假设可以确定外力等效作用点,也意味着机器人系统无外力矩.为了便于推导动力学模型,基于跳跃腿伸长方向建立lOh 坐标系,并且在质心系中讨论机器人主体和底板的运动.
图13
图13
抽象机器人的动力学模型
Fig.13
Dynamic model of the abstract robot
底板和主体的世界系坐标分别记为(x f , y f )和(x b , y b );机器人质心的世界系坐标为(l c , l c );底板和主体在质心系中的坐标分别记为(l cf , h cf )和(l cb , h cf ).月壤作用于底板的承载力F sup 与剪切力F she 与底板的世界系坐标系直接相关,因此底板位置和速度需要进行如下坐标转换:
(15) $\left.\begin{array}{l}{x}_{\mathrm{f}}=({l}_{\mathrm{c}}+{l}_{\mathrm{c}\mathrm{f}})\mathrm{s}\mathrm{i}\mathrm{n}\mathrm{\phi }-{h}_{\mathrm{c}}\mathrm{c}\mathrm{o}\mathrm{s}\mathrm{\phi }\\ {y}_{\mathrm{f}}=({l}_{\mathrm{c}}+{l}_{\mathrm{c}\mathrm{f}})\mathrm{c}\mathrm{o}\mathrm{s}\mathrm{\phi }+{h}_{\mathrm{c}}\mathrm{s}\mathrm{i}\mathrm{n}\mathrm{\phi }\\ {\stackrel{·}{x}}_{\mathrm{f}}=({\stackrel{·}{l}}_{\mathrm{c}}+{\stackrel{·}{l}}_{\mathrm{c}\mathrm{f}})sin\phi -{\stackrel{·}{h}}_{\mathrm{c}}cos\phi \\ {\stackrel{·}{y}}_{\mathrm{f}}=({\stackrel{·}{l}}_{\mathrm{c}}+{\stackrel{·}{l}}_{\mathrm{c}\mathrm{f}})cos\phi +{\stackrel{·}{h}}_{\mathrm{c}}sin\phi \end{array}\right\}$
由式(12)和式(13),月壤作用于底板的平均承载应力σ sup 与平均切应力σ she 的表达式为
(16) $\sigma_{\text {sup }}=K\left(-y_{\mathrm{f}}\right)^{n}+A_{\mathrm{v}}\left(-y_{\mathrm{f}}\right)^{m_{\mathrm{v}}}\left(-\dot{y}_{\mathrm{f}}\right)$
(17) $\begin{aligned}\sigma_{\text {she }}= & \left(c+\sigma_{\text {sup }} \tan \theta\right)\left(1-\mathrm{e}^{\frac{-\left|x_{\mathrm{f}}\right|}{k}}\right)+ \\& A_{\mathrm{h}} \sigma_{\text {sup }}^{m_{\mathrm{h}}}\left(-\dot{x}_{\mathrm{f}}\right)\end{aligned}$
(18) M foo ${\ddot{l}}_{\mathrm{c}\mathrm{f}}$ =$\frac{{M}_{\mathrm{b}\mathrm{o}\mathrm{d}}}{{M}_{\mathrm{s}\mathrm{u}\mathrm{m}}}$ S 0 (σ sup cos φ +σ she sin φ )-F jum
(19) M bod ${\ddot{l}}_{\mathrm{c}\mathrm{b}}$ M foo ${\ddot{l}}_{\mathrm{c}\mathrm{f}}$
(20) M sum ${\ddot{l}}_{\mathrm{c}}$ =S 0 (σ sup cos φ +σ she sin φ )-M sum g lun cos φ
(21) M foo ${\ddot{h}}_{\mathrm{c}\mathrm{f}}$ =0
(22) M bod ${\ddot{h}}_{\mathrm{c}\mathrm{b}}$ =0
(23) $\begin{aligned}M_{\mathrm{sum}} \ddot{h}_{\mathrm{c}}= & S_{0}\left(\sigma_{\mathrm{sup}} \sin \varphi-\sigma_{\mathrm{she}} \cos \varphi\right)- \\& M_{\mathrm{sum}} g_{\mathrm{lun}} \sin \varphi\end{aligned}$
联立式(15)~(23)得到的微分方程组可以化为一阶非线性方程组,通过隆格-库塔法可以求解给定边界条件的数值解.求数值解时,M bod 取1.86 kg,M foo 取0.14 kg,g lun 取1.623 m/s2 .
3.2 抽象化机器人的动力学模型验证
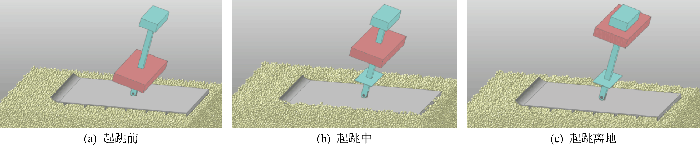
为验证基于底板-月壤接触模型的机器人月面跳跃动力学模型在描述机器人跳跃过程中的适用性,采用离散元软件EDEM与动力学软件RecurDyn,进行耦合仿真验证.耦合仿真模拟抽象化机器人以59 N的作用力进行不同角度的恒力起跳.仿真时间0.09 s,时间步数900.
以17° 起跳角起跳为例,耦合仿真过程如图14 所示.
图14
图14
抽象机器人耦合仿真起跳过程
Fig.14
Coupling simulation of the robot take-off process
跳跃机器人运动性能的主要指标是跳远距离和跳跃高度.在月球表面接近真空的环境下,这两项指标在机器人离开地面后就可以确定.月球的低重力环境下,机器人起跳过程离地前的质心位移量远小于离地后的质心位移量.因此跳远距离和跳跃高度主要由离地瞬间机器人质心的速度vz 决定.图15 为机器人质心在17°、25°和33° 的起跳角下水平速度和竖直速度随跳跃腿作用距离L 的关系曲线比较.
图15
图15
起跳过程动力学模型计算结果与耦合仿真结果比较
Fig.15
Comparison between the calculation results and the coupled simulation results of the dynamic model in the take-off process
从图15 中的比较结果来看,理论模型计算的质心水平速度分量与耦合仿真的契合度较好,但是竖直分量的契合度较差.随着起跳角度的增加,理论模型计算的质心竖直速度分量的偏差相应增加.这是因为随着起跳角度的增加,起跳过程的水平剪切运动更加明显,由于目前的底板-月壤接触模型未考虑月壤水平剪切对竖直承载的影响,所以偏差越来越大.
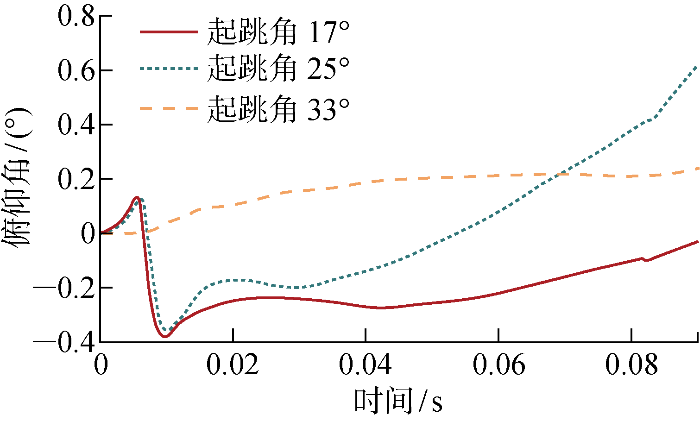
耦合仿真中不同起跳角度下机器人的俯仰转角随时间的变化如图16 所示.可以看出,起跳过程机器人俯仰角变化很小,因此动力学模型中外力指向质心的基本假设近似成立.
图16
图16
起跳过程机器人俯仰角变化曲线
Fig.16
Variation of the robot pitch angle in the take-off process
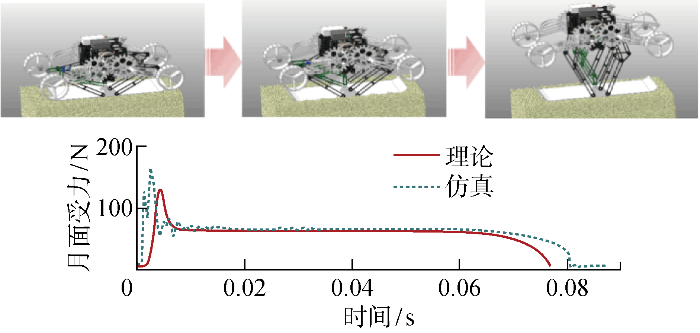
3.3 机器人完整结构月面起跳动力学结果分析
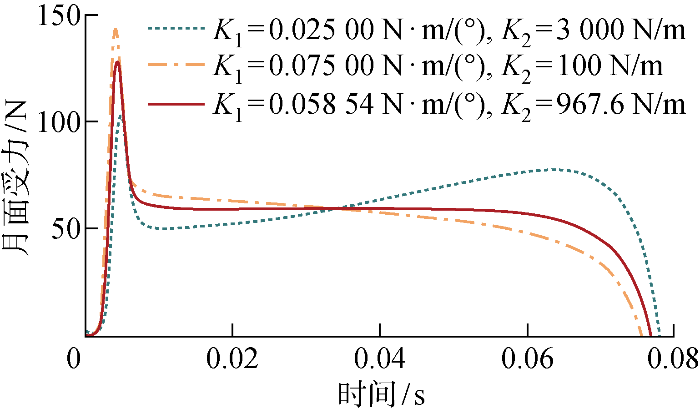
利用抽象机器人动力学模型的仿真结果验证底板-月壤接触模型后,将接触模型中F she 、F sup 的表达式代入1.3节所推导的机器人多体动力学模型中并进行起跳过程的数值求解,可得到不同储能刚度方案下的机器人完整结构以最大初速度竖直起跳过程中月面受力随起跳时间的变化情况,如图17 所示.图中:K 1 表示扭簧刚度,K 2 表示拉簧刚度.通过优化调整储能元件刚度和变化范围,最终选定储能刚度方案为K 1 =0.058 54 N·m/(°)与K 2 =967.60 N/m,如图17 中红实线所示,该储能方案综合考虑了详细结构设计时的实际储能元件选型与杆件强度需求,实现起跳过程中月面受力近似恒力.
图17
图17
储能方案优化过程示意图
Fig.17
Optimization process of the energy storage solution
机器人完整结构的动力学模型结果通过联合仿真环境进行验证,验证过程与结果如图18 所示.可以看到在离散元联合仿真环境中,起跳过程中的月面受力曲线与理论解总体变化趋势一致,但仍存在一定偏差,主要表现为:受力仿真解最开始表现为两个峰值,而非理论解所呈现的单个峰值.这是因为实际起跳时存在雪橇底板底部针形肋板插入月壤的过程,所以第1个峰为肋板下陷的瞬间受力,第2个峰为雪撬板本体的下陷瞬间受力.此外,仿真环境中的起跳时间偏长导致最终产生瞬间碰撞限位起跳,引起起跳时间点比自然起跳时间点偏前,可能是由于仿真环境的各项参数设置(如各部件质量、质心等)与理论解仍存在差异.
图18
图18
机器人月面起跳动力学理论与仿真结果对比图
Fig.18
Comparison of theoretical results and simulation results of the robot’s lunar take-off dynamics
4 跳跃机器人运动规划算法设计
跳跃机器人在月球表面运动时需要在空中不碰到障碍物的前提下精确跳跃到点,这意味着机器人离地时需要具备精确的初速度;同时为了降低机器人落地后的受损风险,需要进行主动缓冲.为了满足这两项基本要求,本文设计了对应的运动规划算法.
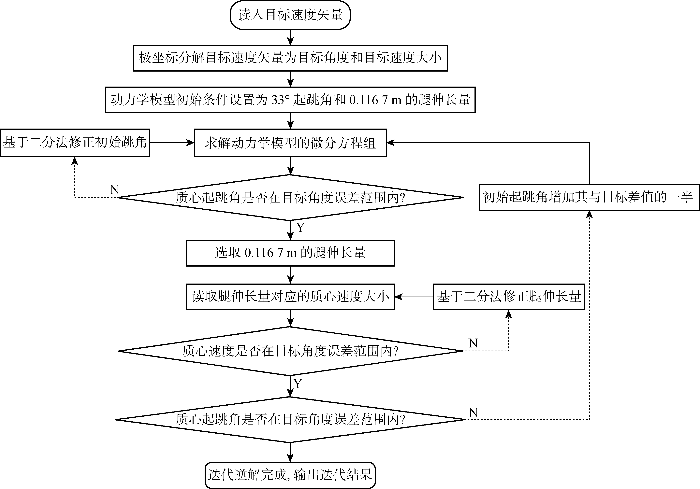
4.1 精确跳跃到点的运动规划算法
机器人精确跳跃到点的运动规划,本质上是从给定的离地速度逆解出起跳角度与跳跃腿作用距离.月面跳跃过程的机器人动力学模型没有解析解,因此需要采用二分法逼近求得近似数值解.具体的算法逻辑框图如图19 所示.
图19
图19
精确跳跃到点的运动规划算法逻辑框图
Fig.19
Flow chart of the motion planning algorithm for accurate jumping to the point
该算法逆解结果中质心速度矢量的大小偏差±2 mm/s,角度偏差 ±0.005°,在此情形下,采用个人电脑(CPU intel i7-10750H 2.6 GHz)的运算时间控制在0.005 s内.如果优化正解过程(非解方程的方法),运算时间可能更短.这说明3.1小节得到的动力学模型具有实际应用潜力.
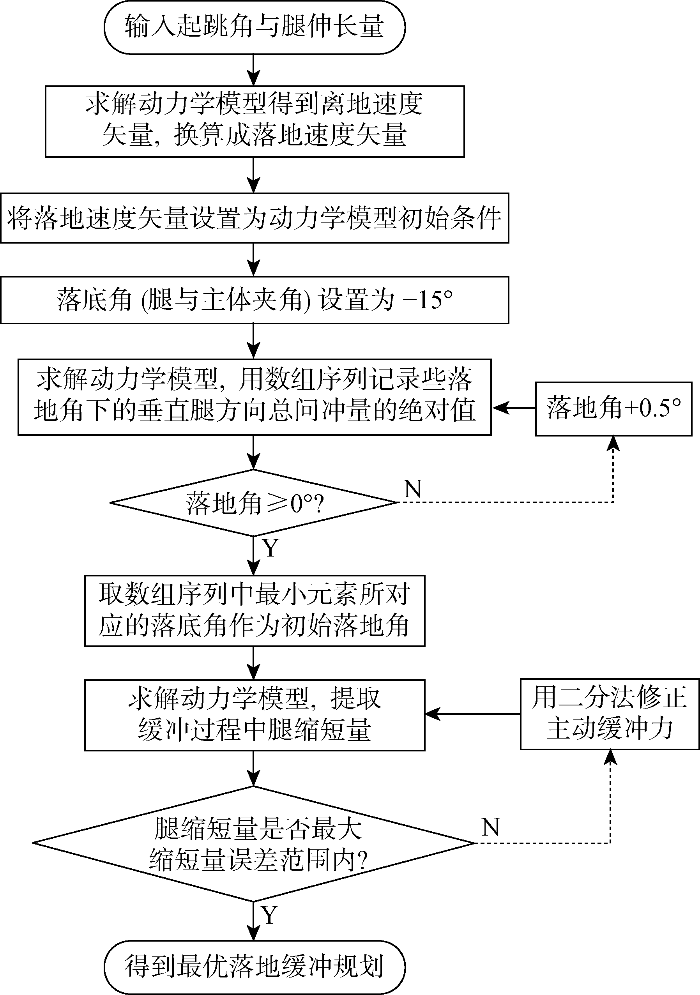
4.2 落地主动缓冲的运动规划算法
主动缓冲算法的设计目标是为了尽可能降低落地过程中底板接触地面后跳跃机器人所受的外力.沿跳跃腿方向的受力可以通过减小主动缓冲力实现,但是缓冲力的下限受跳跃腿行程范围限制;垂直跳跃腿方向的受力可以通过跳跃腿的角度实现.主动缓冲力和跳跃腿角度的取值通过二分法逼近.具体算法逻辑框图如图20 所示.
图20
图20
落地主动缓冲的运动规划算法逻辑框图
Fig.20
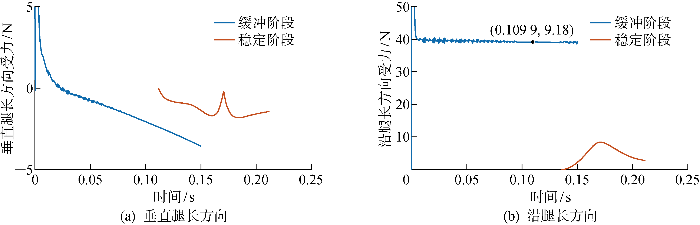
Flow chart of the motion planning algorithm for active buffering on the ground
机器人采用此算法进行主动缓冲的全过程如图21 所示,缓冲阶段在稳定阶段开始时就结束了.缓冲阶段指采用主动缓冲算法通过控制跳跃电机的力矩来进行落地时的缓冲过程,在机器人在月壤上停止下陷时结束.随后是稳定阶段,在这一过程中机器人不进行主动缓冲,机器人作为一个单一刚体在月壤上运动.由图21 可见,以33° 起跳角为例,垂直跳跃腿方向的理论受力小于5 N,沿腿方向的理论受力稳定小于40 N,合力小于起跳力平均值的70%,满足所设计机器人的结构强度要求.该算法基于个人电脑的运算时间占机器人离地后滞空时间的40%以下,初步验证了其可行性.
图21
图21
跳跃机器人最优缓冲规划的落地过程中外力作用结果
Fig.21
Results of external forces during active buffering of jumping robots
5 结论
(1) 基于月球表面低重力环境及月壤特性设计了一款月面跳跃机器人.该机器人的跳跃机构是一种拉簧与扭簧复合的多连杆储能释放结构.该结构具有较高的伸缩比,并且能够实现接近恒力的释放过程.
(2) 针对月面跳跃过程高度动态的特点,拓展了传统月面机器人分析所采用的月壤力学特性理论,提出考虑月壤相互作用中阻尼影响的底板-月壤接触模型.该接触模型应用在跳跃动力学中与离散元-动力学耦合仿真的结果在水平方向上契合度较好,竖直方向上的偏差来源于水平剪切对沉降的耦合影响.该影响的具体规律有待进一步研究.
(3) 基于机器人月壤表面跳跃动力学模型设计了起跳过程的精确跳跃到点运动规划算法与落地过程的主动缓冲运动规划算法,并验证了其可行性.
参考文献
View Option
[1]
肖福根 , 庞贺伟 . 月球地质形貌及其环境概述
[J]. 航天器环境工程 2003 (2 ): 5 -14 .
[本文引用: 2]
XIAO Fugen PANG Hewei An overview of lunar geological features and their environment
[J]. Spacecraft Environmental Engineering 2003 (2 ): 5 -14 .
[本文引用: 2]
[2]
叶培建 , 肖福根 . 月球探测工程中的月球环境问题
[J]. 航天器环境工程 2006 (1 ): 1 -11 .
[本文引用: 1]
YE Peijian XIAO Fugen Lunar environment problems in lunar exploration project
[J]. Spacecraft Environmental Engineering 2006 (1 ): 1 -11 .
[本文引用: 1]
[3]
李贺 , 王禹 , 杜小振 , 等 . 一种可跳跃的月面移动机器人系统设计
[J]. 深空探测学报(中英文) 2020 , 7 (3 ): 304 -310 .
[本文引用: 1]
LI He WANG Yu DU Xiaozhen et al Design of a lunar mobile robot with jumping ability
[J]. Journal of Deep Space Exploration 2020 , 7 (3 ): 304 -310 .
DOI:10.15982/j.issn.2095-7777.2020.20191011011
[本文引用: 1]
The Moon is an important destination for humans to carry out deep space exploration activities. The lunar surface exploration project has increasingly become a global concern. The lunar mobile robot is the foundation of the exploration project and an indispensable part of achieving the goal of lunar exploration. The complex terrain and a large number of craters and massive lunar rocks which put forward higher requirements for the lunar robot’s mobile ability. The lunar surface mobile robot with jumping ability can flexibly adapt to the change of lunar terrain. The robot combines conventional walking,post-deformation walking and pneumatic jumping to achieve the function of moving on the lunar surface and crossing obstacles. When the robot is moving on the regular terrain,the movement mode is consistent with the wheeled robot and the movement efficiency is high; when moving on irregular terrain,it works in the form of irregular wheels which can overcome relatively low obstacles; when encountering large obstacles,the jumping system is used to get over the obstacles with strong ability. The research of the mobile robot can provide a technical reference for the implementation of the lunar patrol and exploration missions.
[4]
YOSHIKAWA K OTSUKI M KUBOTA T et al A new mechanism of smart jumping robot for lunar or planetary satellites exploration
[C]// 2017 IEEE Aerospace Conference Washington, D. C.,USA : IEEE , 2017 : 1 -7 .
[本文引用: 1]
[5]
ACKERMAN E Boston dynamics sand flea robot demonstrates astonishing jumping skills
[J]. IEEE Spectrum Robotics Blog 2012 , 2 (1 ): 1 .
[本文引用: 1]
[6]
LI F LIU W FU X Jumping like an insect:Design and dynamic optimization of a jumping mini robot based on bio-mimetic inspiration
[J]. Mechatronics 2012 , 22 (2 ): 167 -176 .
[本文引用: 1]
[7]
HALDANE D W PLECNIK M M YIM J K et al Robotic vertical jumping agility via series-elastic power modulation
[J]. Science Robotics 2016 , 1 (1 ): eaag2048 .
[本文引用: 1]
[8]
陈子明 , 卢杰 , 邓朋 , 等 . 基于弹尾虫运动机制的平衡轮式跳跃机器人的设计
[J]. 机械工程学报 2020 , 56 (17 ): 20 -28 .
DOI:10.3901/JME.2020.17.020
[本文引用: 1]
针对弹尾虫的生物体结构与运动特性,复合轮式与跳跃运动设计了一种新型跳跃机器人。利用弹尾虫独特的跳跃运动机制设计了跳跃原理结构,并使用拉格朗日法完成跳跃原理结构着地起跳、腾空阶段动力学方程的构建与仿真,分析并验证了跳跃过程及跳跃原理的可行性。通过轮式结构的复合设计,使得机器人具备平衡轮式移动特性,展现跳跃原理结构的可移植性。搭建机器人控制系统,使用3D打印技术完成样机制作,最终设计机器人长15 cm、宽9.5 cm、高7.5 cm,整体重268.6 g。试验测试表明,机器人具备快速连续运动性能,1 s内完成能量蓄积与释放,0.5 s内实现姿态复位;具备多运动模式,可实现高20 cm、远15 cm的跳跃动作,同时可完成跳跃后的姿态复位,平衡轮式移动以及传统平衡小车难以实现的倒地后自主平衡复位。
CHEN Ziming LU Jie DENG Peng et al Design of balanced wheeled jumping robot based on the motion mechanism of springtail
[J]. Chinese Journal of Mechanical Engineering 2020 , 56 (17 ): 20 -28 .
[本文引用: 1]
[9]
BOSWORTH W WHITNEY J KIM S et al Robot locomotion on hard and soft ground:Measuring stabili两个方向的位移,具有两个自由度.故定ty and ground properties in-situ
[C]// International Conference on Robotics and Automation (ICRA) Washington, D. C., USA : IEEE , 2016 : 3582 -3589 .
[本文引用: 1]
[10]
马传帅 , 文桂林 , 周景宇 , 等 . 月球车沙地行驶动力学建模与仿真
[J]. 机械工程学报 2011 , 47 (23 ): 97 -103 .
[本文引用: 1]
提出建立刚性车轮在松软路面行驶的动力学模型的新方法。该方法对车轮进行离散化处理,基于沉陷理论、剪切理论和被动土压理论预测轮壤接触表面的相互作用力,从而可以对车轮表面的应力分布以及电动机转矩进行分析。进一步地将子模型整合到主副摇臂月球车悬架系统中,建立在松软干砂表面行驶的动力学模型。通过仿真,对移动系统中各个车轮表面的应力分布以及驱动电动机转矩进行分析。为验证模型的正确性,开发了信号处理模块和主副摇臂移动系统试验平台,开展主副摇臂月球车移动系统在干沙表面的移动性能试验研究,对仿真和试验中的车轮功耗以及滑移率进行比较。结果表明主副摇臂移动系统动力学模型具有较好的可信性,该建模方法可以用于高效率的多轮多轴月球车的动力学分析。
MA Chuanshuai WEN Guilin ZHOU Jingyu et al Whole-vehicle dynamical model and simulation for lunar rover traveling on the loose soil
[J]. Chinese Journal of Mechanical Engineering 2011 , 47 (23 ): 97 -103 .
[本文引用: 1]
[11]
梁忠超 , 王永富 , 高海波 , 等 . 基于应力修正的载人月球车车轮侧向力模型研究
[J]. 机械工程学报 2017 , 53 (9 ): 14 -21 .
DOI:10.3901/JME.2017.09.014
[本文引用: 2]
载人月球探测是无人月球探测的必然发展趋势,载人月球车是载人月球探测中必不可少的探测工具和手段。宇航员驾驶载人月球车进行月面探测任务,在进行转向行驶时,车轮实际速度方向与滚动方向不一致,此时土壤对车轮产生侧向力的作用。载人月球车车轮运行在月球真空、大温差、松软月面土壤的恶劣条件下,与传统地面橡胶车轮不同,采用弹性筛网形式的车轮。基于一般刚性车轮的侧向力模型,引入三个应力修正系数,其中包括两个侧向附着力计算的应力修正系数和一个侧向推土力计算的应力修正系数。通过推导得到载人月球车弹性筛网车轮的侧向力数学模型,利用参数辨识得到应力修正系数的求解公式。对比理论修正模型与试验结果,验证了载人月球车弹性筛网轮侧向力理论模型的准确性。
LIANG Zhongchao WANG Yongfu GAO Haibo et al Lateral force model of lunar roving vehicle’s wheel based on pressure modifying
[J]. Chinese Journal of Mechanical Engineering 2017 , 53 (9 ): 14 -21 .
[本文引用: 2]
[12]
BEKKER M G Theory of land locomotion: The mechanics of vehicle mobility [M]. Ann Arbor,USA : University of Michigan Press , 1956 : 45 -50 .
[本文引用: 3]
[13]
张宇 , 陈善雄 , 余飞 , 等 . 低应力水平下 CAS-1 模拟月壤力学特性试验研究
[J]. 岩石力学与工程学报 2015 , 34 (1 ): 174 -181 .
[本文引用: 1]
ZHANG Yu CHEN Shanxiong YU Fei et al Experimental study on mechanical properties of CAS-1 lunar soil under low stress
[J]. Chinese Journal of Rock Mechanics and Engineering 2015 , 34 (1 ): 174 -181 .
[本文引用: 1]
[14]
张宇 , 余飞 , 陈善雄 , 等 . CAS-1 模拟月壤动剪切模量与阻尼比的试验研究
[J]. 岩土力学 2014 , 35 (1 ): 74 -82 .
[本文引用: 1]
ZHANG Yu YU Fei CHEN Shanxiong et al Experimental study of dynamic shear modulus and damping ratio of CAS-1 lunar soil simulant
[J]. Rock and Soil Mechanics 2014 , 35 (1 ): 74 -82 .
[本文引用: 1]
[15]
黄晗 , 吴宝广 , 许述财 , 等 . 高密实度模拟月壤力学特性试验研究
[J]. 农业工程学报 2019 , 35 (1 ): 31 -38 .
[本文引用: 2]
HUANG Han WU Baoguang XU Shucai et al Test study on mechanical properties of lunar soil simulant under high compactness condition
[J]. Transactions of the Chinese Society of Agricultural Engineering 2019 , 35 (1 ): 31 -38 .
[本文引用: 2]
[16]
王康 , 姚猛 , 李立犇 , 等 . 基于月面表取采样触月压痕的月壤力学状态分析
[J]. 吉林大学学报(工学版) 2021 , 51 (3 ): 1146 -1152 .
[本文引用: 1]
WANG Kang YAO Meng LI Liben et al Mechanical performance identification for lunar soil in lunar surface sampling
[J]. Journal of Jilin University (Engineering and Technology Edition) 2021 , 51 (3 ): 1146 -1152 .
[本文引用: 1]
[17]
田野 , 李晨昊 , 李楠楠 , 等 . 基于应力波反射法的模拟月壤特性研究
[J]. 机械制造 2021 , 59 (11 ): 1 -3 .
[本文引用: 1]
TIAN Ye LI Chenhao LI Nannan et al Study on characteristics of simulated lunar soil based on stress wave reflection method
[J]. Machinery 2021 , 59 (11 ): 1 -3 .
[本文引用: 1]
[18]
邹猛 , 李建桥 , 贾阳 , 等 . 月壤静力学特性的离散元模拟
[J]. 吉林大学学报(工学版) 2008 (2 ): 383 -387 .
[本文引用: 1]
ZOU Meng LI Jianqiao JIA Yang et al Statics characteristics of lunar soil by DEM simulation
[J]. Journal of Jilin University (Engineering and Technology Edition) 2008 (2 ): 383 -387 .
[本文引用: 1]
[19]
林呈祥 , 钟世英 , 凌道盛 . 模拟月壤颗粒形状特征及其对抗剪强度影响分析
[J]. 东北大学学报(自然科学版) 2016 , 37 (11 ): 1640 -1644 .
DOI:10.12068/j.issn.1005-3026.2016.11.025
[本文引用: 1]
为研究颗粒形状特征对抗剪强度的影响,对模拟月壤颗粒进行体视显微镜扫描拍照,并利用图形处理软件对各粒径组颗粒的形状特征进行量化统计.结果表明:模拟月壤颗粒的主要形状有圆形、类椭圆形、类三角形和类正方形等.利用PFC 3D软件中的“Clump”命令构造出不同形状的模拟月壤颗粒并通过三轴试验数值模型研究其抗剪强度指标值,模拟结果表明:颗粒形状对模拟月壤的抗剪强度指标值有着明显的影响,其中构造出的类椭圆体颗粒试样抗剪强度最大,而规则的球体颗粒试样的抗剪强度最小;当颗粒形状都是类三角体时,凹凸度越大,试样的抗剪强度指标值也越大.
LIN Chengxiang ZHONG Shiying LING Daosheng Analysis of particle shape characteristics of lunar soil simulant and its effect on shear strength
[J]. Journal of Northeastern University (Natural Science) 2016 , 37 (11 ): 1640 -1644 .
[本文引用: 1]
[20]
林云成 , 李立犇 , 赵振家 , 等 . 着陆器足垫冲击月壤动态行为离散元仿真分析
[J]. 深空探测学报 2020 , 7 (2 ): 171 -177 .
[本文引用: 1]
LIN Yuncheng LI Liben ZHAO Zhenjia et al Simulation analysis of dynamic behavior of lander footpad impact on lunar regolith
[J]. Journal of Deep Space Exploration 2020 , 7 (2 ): 171 -177 .
DOI:10.15982/j.issn.2095-7777.2020.20190313002
[本文引用: 1]
It is important to study the interaction between lander footpad and lunar regolith for landing stability, safety and landing mechanism design. In this paper, a dynamic mechanical model of lunar regolith impacted by footpads with angle is built, and the dynamic changes of lunar soil under 0°、8°、15°、22° impact angle and 1 m/s, 2 m/s and 4 m/s impact velocity are analyzed by Discrete Element Method (DEM). It is concluded that the maximum impact force is 5080.6 N when the impact velocity is 4 m/s and the impact angle is 0°, and the impact angle was larger; the impact force is smaller when the vertical displacement is the same. In addition, the bigger the angle of footpad impact on lunar soil, the smaller the compaction effect on lunar soil. The change of porosity before and after 22° is only 26.5 %. When the impact angle is fixed, the higher the velocity, the more compact the lunar soil is, and the greater degree of compaction. When the impact velocity is 4 m/s, the change of porosity before and after the impact is 78.1%. The research has certain reference significance for the design of landing mechanism and landing control.
[21]
黄雨 , 蒋馥鸿 . 月壤工程地质特性综述
[J]. 同济大学学报(自然科学版) 2013 , 41 (9 ): 1281 -1285 .
[本文引用: 1]
HUANG Yu JIANG Fuhong Review of engineer geological characteristics of lunar regolith
[J]. Journal of Tongji University (Natural Science) 2013 , 41 (9 ): 1281 -1285 .
[本文引用: 1]
[22]
郑永春 , 欧阳自远 , 王世杰 , 等 . 月壤的物理和机械性质
[J]. 矿物岩石 2004 (4 ): 14 -19 .
[本文引用: 1]
ZHENG Yongchun OUYANG Ziyuan WANG Shijie et al Physical and mechanical properties of lunar regolith
[J]. Mineralogy and Petrology 2004 (4 ): 14 -19 .
[本文引用: 1]
月球地质形貌及其环境概述
2
2003
... 月表地形十分复杂,包括撞击坑、月球高地、月海和风化层等,这些地形上还分布着大量直径 0.01~1 m的月岩、月坑等障碍物[1 ] .常规轮式月球车无法完全适应月表复杂地形.月球的重力加速度是地球的1/6,大气密度为地球的1/1 012,接近真空状态[2 ] .基于月面的特殊特性,同等条件下跳跃机器人在月球表面可实现更高、更远和更可控的跳跃,跳跃机器人在月面复杂地形的探测中具有巨大的应用前景. ...
... 为保证离散元颗粒床接近月球表面真实月壤,离散元环境的重力加速度设定为1.623 m/s2 ,与月面相同[1 ] ,同时颗粒床的力学特性要接近月面月壤.标定颗粒床力学特性可以基于松软地面轮-壤接触模型的剪切特性曲线[12 ] .该特性曲线可表示为 ...
An overview of lunar geological features and their environment
2
2003
... 月表地形十分复杂,包括撞击坑、月球高地、月海和风化层等,这些地形上还分布着大量直径 0.01~1 m的月岩、月坑等障碍物[1 ] .常规轮式月球车无法完全适应月表复杂地形.月球的重力加速度是地球的1/6,大气密度为地球的1/1 012,接近真空状态[2 ] .基于月面的特殊特性,同等条件下跳跃机器人在月球表面可实现更高、更远和更可控的跳跃,跳跃机器人在月面复杂地形的探测中具有巨大的应用前景. ...
... 为保证离散元颗粒床接近月球表面真实月壤,离散元环境的重力加速度设定为1.623 m/s2 ,与月面相同[1 ] ,同时颗粒床的力学特性要接近月面月壤.标定颗粒床力学特性可以基于松软地面轮-壤接触模型的剪切特性曲线[12 ] .该特性曲线可表示为 ...
月球探测工程中的月球环境问题
1
2006
... 月表地形十分复杂,包括撞击坑、月球高地、月海和风化层等,这些地形上还分布着大量直径 0.01~1 m的月岩、月坑等障碍物[1 ] .常规轮式月球车无法完全适应月表复杂地形.月球的重力加速度是地球的1/6,大气密度为地球的1/1 012,接近真空状态[2 ] .基于月面的特殊特性,同等条件下跳跃机器人在月球表面可实现更高、更远和更可控的跳跃,跳跃机器人在月面复杂地形的探测中具有巨大的应用前景. ...
Lunar environment problems in lunar exploration project
1
2006
... 月表地形十分复杂,包括撞击坑、月球高地、月海和风化层等,这些地形上还分布着大量直径 0.01~1 m的月岩、月坑等障碍物[1 ] .常规轮式月球车无法完全适应月表复杂地形.月球的重力加速度是地球的1/6,大气密度为地球的1/1 012,接近真空状态[2 ] .基于月面的特殊特性,同等条件下跳跃机器人在月球表面可实现更高、更远和更可控的跳跃,跳跃机器人在月面复杂地形的探测中具有巨大的应用前景. ...
一种可跳跃的月面移动机器人系统设计
1
2020
... 目前,国内外学者针对月面跳跃机器人开展了一定研究.例如,李贺等[3 ] 设计了一种通过气缸储能进行跳跃的月面移动机器人,从能量角度评估了机器人的跳跃能力,但没有通过试验验证月壤上的跳跃能力.Yoshikawa等[4 ] 设计了一种通过弹簧储能进行跳跃的月面探测机器人,该跳跃机器人在地球重力下的模拟月壤上的跳跃距离为0.2~1.0 m,该研究虽然验证了机器人构型的可行性,但由于缺乏月壤对跳跃影响的研究,无法让机器人实现可控的精确跳跃,从而难以直接应用到月面探测任务中.而在主要从硬地起跳的小型跳跃机器人领域,重点是通过仿生设计与参数优化来达到跳跃性能的目标,如跳蚤[5 ] 、蝉[6 ] 、夜猴[7 ] 、弹尾虫[8 ] 等仿生跳跃形式.然而,该类机器人在松软地貌起跳研究多以试验为主,如麻省理工学院(MIT)猎豹机器人在软硬地面跳跃进行了实验数据测试[9 ] ,但微观机制上的颗粒介质力的定律并未研究透彻,因此在松软地貌上实现精准跳跃具有挑战性. ...
Design of a lunar mobile robot with jumping ability
1
2020
... 目前,国内外学者针对月面跳跃机器人开展了一定研究.例如,李贺等[3 ] 设计了一种通过气缸储能进行跳跃的月面移动机器人,从能量角度评估了机器人的跳跃能力,但没有通过试验验证月壤上的跳跃能力.Yoshikawa等[4 ] 设计了一种通过弹簧储能进行跳跃的月面探测机器人,该跳跃机器人在地球重力下的模拟月壤上的跳跃距离为0.2~1.0 m,该研究虽然验证了机器人构型的可行性,但由于缺乏月壤对跳跃影响的研究,无法让机器人实现可控的精确跳跃,从而难以直接应用到月面探测任务中.而在主要从硬地起跳的小型跳跃机器人领域,重点是通过仿生设计与参数优化来达到跳跃性能的目标,如跳蚤[5 ] 、蝉[6 ] 、夜猴[7 ] 、弹尾虫[8 ] 等仿生跳跃形式.然而,该类机器人在松软地貌起跳研究多以试验为主,如麻省理工学院(MIT)猎豹机器人在软硬地面跳跃进行了实验数据测试[9 ] ,但微观机制上的颗粒介质力的定律并未研究透彻,因此在松软地貌上实现精准跳跃具有挑战性. ...
A new mechanism of smart jumping robot for lunar or planetary satellites exploration
1
2017
... 目前,国内外学者针对月面跳跃机器人开展了一定研究.例如,李贺等[3 ] 设计了一种通过气缸储能进行跳跃的月面移动机器人,从能量角度评估了机器人的跳跃能力,但没有通过试验验证月壤上的跳跃能力.Yoshikawa等[4 ] 设计了一种通过弹簧储能进行跳跃的月面探测机器人,该跳跃机器人在地球重力下的模拟月壤上的跳跃距离为0.2~1.0 m,该研究虽然验证了机器人构型的可行性,但由于缺乏月壤对跳跃影响的研究,无法让机器人实现可控的精确跳跃,从而难以直接应用到月面探测任务中.而在主要从硬地起跳的小型跳跃机器人领域,重点是通过仿生设计与参数优化来达到跳跃性能的目标,如跳蚤[5 ] 、蝉[6 ] 、夜猴[7 ] 、弹尾虫[8 ] 等仿生跳跃形式.然而,该类机器人在松软地貌起跳研究多以试验为主,如麻省理工学院(MIT)猎豹机器人在软硬地面跳跃进行了实验数据测试[9 ] ,但微观机制上的颗粒介质力的定律并未研究透彻,因此在松软地貌上实现精准跳跃具有挑战性. ...
Boston dynamics sand flea robot demonstrates astonishing jumping skills
1
2012
... 目前,国内外学者针对月面跳跃机器人开展了一定研究.例如,李贺等[3 ] 设计了一种通过气缸储能进行跳跃的月面移动机器人,从能量角度评估了机器人的跳跃能力,但没有通过试验验证月壤上的跳跃能力.Yoshikawa等[4 ] 设计了一种通过弹簧储能进行跳跃的月面探测机器人,该跳跃机器人在地球重力下的模拟月壤上的跳跃距离为0.2~1.0 m,该研究虽然验证了机器人构型的可行性,但由于缺乏月壤对跳跃影响的研究,无法让机器人实现可控的精确跳跃,从而难以直接应用到月面探测任务中.而在主要从硬地起跳的小型跳跃机器人领域,重点是通过仿生设计与参数优化来达到跳跃性能的目标,如跳蚤[5 ] 、蝉[6 ] 、夜猴[7 ] 、弹尾虫[8 ] 等仿生跳跃形式.然而,该类机器人在松软地貌起跳研究多以试验为主,如麻省理工学院(MIT)猎豹机器人在软硬地面跳跃进行了实验数据测试[9 ] ,但微观机制上的颗粒介质力的定律并未研究透彻,因此在松软地貌上实现精准跳跃具有挑战性. ...
Jumping like an insect:Design and dynamic optimization of a jumping mini robot based on bio-mimetic inspiration
1
2012
... 目前,国内外学者针对月面跳跃机器人开展了一定研究.例如,李贺等[3 ] 设计了一种通过气缸储能进行跳跃的月面移动机器人,从能量角度评估了机器人的跳跃能力,但没有通过试验验证月壤上的跳跃能力.Yoshikawa等[4 ] 设计了一种通过弹簧储能进行跳跃的月面探测机器人,该跳跃机器人在地球重力下的模拟月壤上的跳跃距离为0.2~1.0 m,该研究虽然验证了机器人构型的可行性,但由于缺乏月壤对跳跃影响的研究,无法让机器人实现可控的精确跳跃,从而难以直接应用到月面探测任务中.而在主要从硬地起跳的小型跳跃机器人领域,重点是通过仿生设计与参数优化来达到跳跃性能的目标,如跳蚤[5 ] 、蝉[6 ] 、夜猴[7 ] 、弹尾虫[8 ] 等仿生跳跃形式.然而,该类机器人在松软地貌起跳研究多以试验为主,如麻省理工学院(MIT)猎豹机器人在软硬地面跳跃进行了实验数据测试[9 ] ,但微观机制上的颗粒介质力的定律并未研究透彻,因此在松软地貌上实现精准跳跃具有挑战性. ...
Robotic vertical jumping agility via series-elastic power modulation
1
2016
... 目前,国内外学者针对月面跳跃机器人开展了一定研究.例如,李贺等[3 ] 设计了一种通过气缸储能进行跳跃的月面移动机器人,从能量角度评估了机器人的跳跃能力,但没有通过试验验证月壤上的跳跃能力.Yoshikawa等[4 ] 设计了一种通过弹簧储能进行跳跃的月面探测机器人,该跳跃机器人在地球重力下的模拟月壤上的跳跃距离为0.2~1.0 m,该研究虽然验证了机器人构型的可行性,但由于缺乏月壤对跳跃影响的研究,无法让机器人实现可控的精确跳跃,从而难以直接应用到月面探测任务中.而在主要从硬地起跳的小型跳跃机器人领域,重点是通过仿生设计与参数优化来达到跳跃性能的目标,如跳蚤[5 ] 、蝉[6 ] 、夜猴[7 ] 、弹尾虫[8 ] 等仿生跳跃形式.然而,该类机器人在松软地貌起跳研究多以试验为主,如麻省理工学院(MIT)猎豹机器人在软硬地面跳跃进行了实验数据测试[9 ] ,但微观机制上的颗粒介质力的定律并未研究透彻,因此在松软地貌上实现精准跳跃具有挑战性. ...
基于弹尾虫运动机制的平衡轮式跳跃机器人的设计
1
2020
... 目前,国内外学者针对月面跳跃机器人开展了一定研究.例如,李贺等[3 ] 设计了一种通过气缸储能进行跳跃的月面移动机器人,从能量角度评估了机器人的跳跃能力,但没有通过试验验证月壤上的跳跃能力.Yoshikawa等[4 ] 设计了一种通过弹簧储能进行跳跃的月面探测机器人,该跳跃机器人在地球重力下的模拟月壤上的跳跃距离为0.2~1.0 m,该研究虽然验证了机器人构型的可行性,但由于缺乏月壤对跳跃影响的研究,无法让机器人实现可控的精确跳跃,从而难以直接应用到月面探测任务中.而在主要从硬地起跳的小型跳跃机器人领域,重点是通过仿生设计与参数优化来达到跳跃性能的目标,如跳蚤[5 ] 、蝉[6 ] 、夜猴[7 ] 、弹尾虫[8 ] 等仿生跳跃形式.然而,该类机器人在松软地貌起跳研究多以试验为主,如麻省理工学院(MIT)猎豹机器人在软硬地面跳跃进行了实验数据测试[9 ] ,但微观机制上的颗粒介质力的定律并未研究透彻,因此在松软地貌上实现精准跳跃具有挑战性. ...
Design of balanced wheeled jumping robot based on the motion mechanism of springtail
1
2020
... 目前,国内外学者针对月面跳跃机器人开展了一定研究.例如,李贺等[3 ] 设计了一种通过气缸储能进行跳跃的月面移动机器人,从能量角度评估了机器人的跳跃能力,但没有通过试验验证月壤上的跳跃能力.Yoshikawa等[4 ] 设计了一种通过弹簧储能进行跳跃的月面探测机器人,该跳跃机器人在地球重力下的模拟月壤上的跳跃距离为0.2~1.0 m,该研究虽然验证了机器人构型的可行性,但由于缺乏月壤对跳跃影响的研究,无法让机器人实现可控的精确跳跃,从而难以直接应用到月面探测任务中.而在主要从硬地起跳的小型跳跃机器人领域,重点是通过仿生设计与参数优化来达到跳跃性能的目标,如跳蚤[5 ] 、蝉[6 ] 、夜猴[7 ] 、弹尾虫[8 ] 等仿生跳跃形式.然而,该类机器人在松软地貌起跳研究多以试验为主,如麻省理工学院(MIT)猎豹机器人在软硬地面跳跃进行了实验数据测试[9 ] ,但微观机制上的颗粒介质力的定律并未研究透彻,因此在松软地貌上实现精准跳跃具有挑战性. ...
Robot locomotion on hard and soft ground:Measuring stabili两个方向的位移,具有两个自由度.故定ty and ground properties in-situ
1
2016
... 目前,国内外学者针对月面跳跃机器人开展了一定研究.例如,李贺等[3 ] 设计了一种通过气缸储能进行跳跃的月面移动机器人,从能量角度评估了机器人的跳跃能力,但没有通过试验验证月壤上的跳跃能力.Yoshikawa等[4 ] 设计了一种通过弹簧储能进行跳跃的月面探测机器人,该跳跃机器人在地球重力下的模拟月壤上的跳跃距离为0.2~1.0 m,该研究虽然验证了机器人构型的可行性,但由于缺乏月壤对跳跃影响的研究,无法让机器人实现可控的精确跳跃,从而难以直接应用到月面探测任务中.而在主要从硬地起跳的小型跳跃机器人领域,重点是通过仿生设计与参数优化来达到跳跃性能的目标,如跳蚤[5 ] 、蝉[6 ] 、夜猴[7 ] 、弹尾虫[8 ] 等仿生跳跃形式.然而,该类机器人在松软地貌起跳研究多以试验为主,如麻省理工学院(MIT)猎豹机器人在软硬地面跳跃进行了实验数据测试[9 ] ,但微观机制上的颗粒介质力的定律并未研究透彻,因此在松软地貌上实现精准跳跃具有挑战性. ...
月球车沙地行驶动力学建模与仿真
1
2011
... 基于上述分析,探明跳跃过程中月壤力学特性对机器人的影响是实现月面上可控精确跳跃的基础.目前月面机器人与月壤力学特性相关的研究以轮-壤相互作用为主,我国学者已对月球车在月面行驶过程中车轮所受月壤的正向受力[10 ] 与侧向受力[11 ] 进行了较为充分的研究.而经典轮-壤接触模型中所考虑的杰西剪切理论与Bekker承压模型[12 ] 为准静态模型,能否直接应用于跳跃这一短暂动态过程有待进一步研究. ...
Whole-vehicle dynamical model and simulation for lunar rover traveling on the loose soil
1
2011
... 基于上述分析,探明跳跃过程中月壤力学特性对机器人的影响是实现月面上可控精确跳跃的基础.目前月面机器人与月壤力学特性相关的研究以轮-壤相互作用为主,我国学者已对月球车在月面行驶过程中车轮所受月壤的正向受力[10 ] 与侧向受力[11 ] 进行了较为充分的研究.而经典轮-壤接触模型中所考虑的杰西剪切理论与Bekker承压模型[12 ] 为准静态模型,能否直接应用于跳跃这一短暂动态过程有待进一步研究. ...
基于应力修正的载人月球车车轮侧向力模型研究
2
2017
... 基于上述分析,探明跳跃过程中月壤力学特性对机器人的影响是实现月面上可控精确跳跃的基础.目前月面机器人与月壤力学特性相关的研究以轮-壤相互作用为主,我国学者已对月球车在月面行驶过程中车轮所受月壤的正向受力[10 ] 与侧向受力[11 ] 进行了较为充分的研究.而经典轮-壤接触模型中所考虑的杰西剪切理论与Bekker承压模型[12 ] 为准静态模型,能否直接应用于跳跃这一短暂动态过程有待进一步研究. ...
... 1.3 节中对月壤力学模型进行了抽象,下面将基于离散元仿真环境进一步研究跳跃过程中月壤动力学特性.如图6 所示,采用颗粒流软件EDEM构建与跳跃机器人尺寸相匹配的离散元颗粒及颗粒床.离散元颗粒基于三球模型,参考真实月壤颗粒的延性参数[11 ] 构建,受限于计算机算力,颗粒的最大直径设置为7.0 mm.颗粒床是基于长、宽、高分别为50、50、100 mm的自由堆积颗粒块,密集排列构建而成.受限于计算机算力和存储空间,离散元软件无法将颗粒床做得足够大,从而使剪切变形模量k 接近真实月壤,所以目前构建的在接下来用于跳跃实验的颗粒床,在剪切变形模量方面与真实月壤有较大差距.颗粒床越大,仿真效果与实际越接近,但考虑到仿真算力限制,将颗粒床尺寸设置为如图6 所示. ...
Lateral force model of lunar roving vehicle’s wheel based on pressure modifying
2
2017
... 基于上述分析,探明跳跃过程中月壤力学特性对机器人的影响是实现月面上可控精确跳跃的基础.目前月面机器人与月壤力学特性相关的研究以轮-壤相互作用为主,我国学者已对月球车在月面行驶过程中车轮所受月壤的正向受力[10 ] 与侧向受力[11 ] 进行了较为充分的研究.而经典轮-壤接触模型中所考虑的杰西剪切理论与Bekker承压模型[12 ] 为准静态模型,能否直接应用于跳跃这一短暂动态过程有待进一步研究. ...
... 1.3 节中对月壤力学模型进行了抽象,下面将基于离散元仿真环境进一步研究跳跃过程中月壤动力学特性.如图6 所示,采用颗粒流软件EDEM构建与跳跃机器人尺寸相匹配的离散元颗粒及颗粒床.离散元颗粒基于三球模型,参考真实月壤颗粒的延性参数[11 ] 构建,受限于计算机算力,颗粒的最大直径设置为7.0 mm.颗粒床是基于长、宽、高分别为50、50、100 mm的自由堆积颗粒块,密集排列构建而成.受限于计算机算力和存储空间,离散元软件无法将颗粒床做得足够大,从而使剪切变形模量k 接近真实月壤,所以目前构建的在接下来用于跳跃实验的颗粒床,在剪切变形模量方面与真实月壤有较大差距.颗粒床越大,仿真效果与实际越接近,但考虑到仿真算力限制,将颗粒床尺寸设置为如图6 所示. ...
3
1956
... 基于上述分析,探明跳跃过程中月壤力学特性对机器人的影响是实现月面上可控精确跳跃的基础.目前月面机器人与月壤力学特性相关的研究以轮-壤相互作用为主,我国学者已对月球车在月面行驶过程中车轮所受月壤的正向受力[10 ] 与侧向受力[11 ] 进行了较为充分的研究.而经典轮-壤接触模型中所考虑的杰西剪切理论与Bekker承压模型[12 ] 为准静态模型,能否直接应用于跳跃这一短暂动态过程有待进一步研究. ...
... 为保证离散元颗粒床接近月球表面真实月壤,离散元环境的重力加速度设定为1.623 m/s2 ,与月面相同[1 ] ,同时颗粒床的力学特性要接近月面月壤.标定颗粒床力学特性可以基于松软地面轮-壤接触模型的剪切特性曲线[12 ] .该特性曲线可表示为 ...
... 建立机器人在月面运动的接触模型时,一般采用的经典月壤力学特性模型.除了式(7)和式(8)所示的剪切特性模型,还有Bekker等[12 ] 提出的月壤承压特性模型,其表达式为 ...
低应力水平下 CAS-1 模拟月壤力学特性试验研究
1
2015
... 目前,研究月壤力学特性的方法主要有两种:① 模拟月壤试分析法.张宇等[13 -14 ] 针对不同孔隙比的CAS-1型模拟月壤进行三轴实验,得到剪切特性曲线与承载特性曲线,并定性描述了模拟月壤阻尼比的变化规律.黄晗等[15 ] 对不同密实度的JLU5型模拟月壤进行贯入阻力力学实验,得到模拟月壤的贯入特性曲线.王康等[16 ] 对CE5型模拟月壤进行触月压痕试验,通过偏最小支持向量机(LSSVM)由实验结果预测模拟月壤力学状态.田野等[17 ] 基于应力波反射法,借助霍普金森压杆试验装置,研究了模拟月壤受冲击特性.② 离散元仿真分析法.邹猛等[18 ] 采用颗粒流软件PFC 3D,设计离散元模拟三轴试验,测定了离散元月壤的剪切特性曲线与承载特性曲线.林呈祥等[19 ] 采用颗粒流软件PFC 2D研究了不同颗粒形状对离散元月壤抗剪特性的影响.黄晗等[15 ] 采用颗粒流软件EDEM,设计了离散元模拟圆锥贯入试验,研究了离散元月壤密实度与圆锥指数梯度的关系.林云成等[20 ] 采用PFC 2D,设计了足垫冲击离散元月壤的仿真试验,得到了冲击过程离散元月壤的动态变化情况.实际上,基于模拟月壤的方法难以模拟月面低重力环境,而基于离散元的方法难以模拟真实月壤颗粒的微观形态.由于跳跃过程受重力影响显著,离散元方法更加适合研究跳跃中的月壤力学特性.虽然,针对月壤力学特性种类的研究众多,但明确哪些特性在跳跃过程中起主导作用是实现月面可控跳跃的关键问题之一. ...
Experimental study on mechanical properties of CAS-1 lunar soil under low stress
1
2015
... 目前,研究月壤力学特性的方法主要有两种:① 模拟月壤试分析法.张宇等[13 -14 ] 针对不同孔隙比的CAS-1型模拟月壤进行三轴实验,得到剪切特性曲线与承载特性曲线,并定性描述了模拟月壤阻尼比的变化规律.黄晗等[15 ] 对不同密实度的JLU5型模拟月壤进行贯入阻力力学实验,得到模拟月壤的贯入特性曲线.王康等[16 ] 对CE5型模拟月壤进行触月压痕试验,通过偏最小支持向量机(LSSVM)由实验结果预测模拟月壤力学状态.田野等[17 ] 基于应力波反射法,借助霍普金森压杆试验装置,研究了模拟月壤受冲击特性.② 离散元仿真分析法.邹猛等[18 ] 采用颗粒流软件PFC 3D,设计离散元模拟三轴试验,测定了离散元月壤的剪切特性曲线与承载特性曲线.林呈祥等[19 ] 采用颗粒流软件PFC 2D研究了不同颗粒形状对离散元月壤抗剪特性的影响.黄晗等[15 ] 采用颗粒流软件EDEM,设计了离散元模拟圆锥贯入试验,研究了离散元月壤密实度与圆锥指数梯度的关系.林云成等[20 ] 采用PFC 2D,设计了足垫冲击离散元月壤的仿真试验,得到了冲击过程离散元月壤的动态变化情况.实际上,基于模拟月壤的方法难以模拟月面低重力环境,而基于离散元的方法难以模拟真实月壤颗粒的微观形态.由于跳跃过程受重力影响显著,离散元方法更加适合研究跳跃中的月壤力学特性.虽然,针对月壤力学特性种类的研究众多,但明确哪些特性在跳跃过程中起主导作用是实现月面可控跳跃的关键问题之一. ...
CAS-1 模拟月壤动剪切模量与阻尼比的试验研究
1
2014
... 目前,研究月壤力学特性的方法主要有两种:① 模拟月壤试分析法.张宇等[13 -14 ] 针对不同孔隙比的CAS-1型模拟月壤进行三轴实验,得到剪切特性曲线与承载特性曲线,并定性描述了模拟月壤阻尼比的变化规律.黄晗等[15 ] 对不同密实度的JLU5型模拟月壤进行贯入阻力力学实验,得到模拟月壤的贯入特性曲线.王康等[16 ] 对CE5型模拟月壤进行触月压痕试验,通过偏最小支持向量机(LSSVM)由实验结果预测模拟月壤力学状态.田野等[17 ] 基于应力波反射法,借助霍普金森压杆试验装置,研究了模拟月壤受冲击特性.② 离散元仿真分析法.邹猛等[18 ] 采用颗粒流软件PFC 3D,设计离散元模拟三轴试验,测定了离散元月壤的剪切特性曲线与承载特性曲线.林呈祥等[19 ] 采用颗粒流软件PFC 2D研究了不同颗粒形状对离散元月壤抗剪特性的影响.黄晗等[15 ] 采用颗粒流软件EDEM,设计了离散元模拟圆锥贯入试验,研究了离散元月壤密实度与圆锥指数梯度的关系.林云成等[20 ] 采用PFC 2D,设计了足垫冲击离散元月壤的仿真试验,得到了冲击过程离散元月壤的动态变化情况.实际上,基于模拟月壤的方法难以模拟月面低重力环境,而基于离散元的方法难以模拟真实月壤颗粒的微观形态.由于跳跃过程受重力影响显著,离散元方法更加适合研究跳跃中的月壤力学特性.虽然,针对月壤力学特性种类的研究众多,但明确哪些特性在跳跃过程中起主导作用是实现月面可控跳跃的关键问题之一. ...
Experimental study of dynamic shear modulus and damping ratio of CAS-1 lunar soil simulant
1
2014
... 目前,研究月壤力学特性的方法主要有两种:① 模拟月壤试分析法.张宇等[13 -14 ] 针对不同孔隙比的CAS-1型模拟月壤进行三轴实验,得到剪切特性曲线与承载特性曲线,并定性描述了模拟月壤阻尼比的变化规律.黄晗等[15 ] 对不同密实度的JLU5型模拟月壤进行贯入阻力力学实验,得到模拟月壤的贯入特性曲线.王康等[16 ] 对CE5型模拟月壤进行触月压痕试验,通过偏最小支持向量机(LSSVM)由实验结果预测模拟月壤力学状态.田野等[17 ] 基于应力波反射法,借助霍普金森压杆试验装置,研究了模拟月壤受冲击特性.② 离散元仿真分析法.邹猛等[18 ] 采用颗粒流软件PFC 3D,设计离散元模拟三轴试验,测定了离散元月壤的剪切特性曲线与承载特性曲线.林呈祥等[19 ] 采用颗粒流软件PFC 2D研究了不同颗粒形状对离散元月壤抗剪特性的影响.黄晗等[15 ] 采用颗粒流软件EDEM,设计了离散元模拟圆锥贯入试验,研究了离散元月壤密实度与圆锥指数梯度的关系.林云成等[20 ] 采用PFC 2D,设计了足垫冲击离散元月壤的仿真试验,得到了冲击过程离散元月壤的动态变化情况.实际上,基于模拟月壤的方法难以模拟月面低重力环境,而基于离散元的方法难以模拟真实月壤颗粒的微观形态.由于跳跃过程受重力影响显著,离散元方法更加适合研究跳跃中的月壤力学特性.虽然,针对月壤力学特性种类的研究众多,但明确哪些特性在跳跃过程中起主导作用是实现月面可控跳跃的关键问题之一. ...
高密实度模拟月壤力学特性试验研究
2
2019
... 目前,研究月壤力学特性的方法主要有两种:① 模拟月壤试分析法.张宇等[13 -14 ] 针对不同孔隙比的CAS-1型模拟月壤进行三轴实验,得到剪切特性曲线与承载特性曲线,并定性描述了模拟月壤阻尼比的变化规律.黄晗等[15 ] 对不同密实度的JLU5型模拟月壤进行贯入阻力力学实验,得到模拟月壤的贯入特性曲线.王康等[16 ] 对CE5型模拟月壤进行触月压痕试验,通过偏最小支持向量机(LSSVM)由实验结果预测模拟月壤力学状态.田野等[17 ] 基于应力波反射法,借助霍普金森压杆试验装置,研究了模拟月壤受冲击特性.② 离散元仿真分析法.邹猛等[18 ] 采用颗粒流软件PFC 3D,设计离散元模拟三轴试验,测定了离散元月壤的剪切特性曲线与承载特性曲线.林呈祥等[19 ] 采用颗粒流软件PFC 2D研究了不同颗粒形状对离散元月壤抗剪特性的影响.黄晗等[15 ] 采用颗粒流软件EDEM,设计了离散元模拟圆锥贯入试验,研究了离散元月壤密实度与圆锥指数梯度的关系.林云成等[20 ] 采用PFC 2D,设计了足垫冲击离散元月壤的仿真试验,得到了冲击过程离散元月壤的动态变化情况.实际上,基于模拟月壤的方法难以模拟月面低重力环境,而基于离散元的方法难以模拟真实月壤颗粒的微观形态.由于跳跃过程受重力影响显著,离散元方法更加适合研究跳跃中的月壤力学特性.虽然,针对月壤力学特性种类的研究众多,但明确哪些特性在跳跃过程中起主导作用是实现月面可控跳跃的关键问题之一. ...
... [15 ]采用颗粒流软件EDEM,设计了离散元模拟圆锥贯入试验,研究了离散元月壤密实度与圆锥指数梯度的关系.林云成等[20 ] 采用PFC 2D,设计了足垫冲击离散元月壤的仿真试验,得到了冲击过程离散元月壤的动态变化情况.实际上,基于模拟月壤的方法难以模拟月面低重力环境,而基于离散元的方法难以模拟真实月壤颗粒的微观形态.由于跳跃过程受重力影响显著,离散元方法更加适合研究跳跃中的月壤力学特性.虽然,针对月壤力学特性种类的研究众多,但明确哪些特性在跳跃过程中起主导作用是实现月面可控跳跃的关键问题之一. ...
Test study on mechanical properties of lunar soil simulant under high compactness condition
2
2019
... 目前,研究月壤力学特性的方法主要有两种:① 模拟月壤试分析法.张宇等[13 -14 ] 针对不同孔隙比的CAS-1型模拟月壤进行三轴实验,得到剪切特性曲线与承载特性曲线,并定性描述了模拟月壤阻尼比的变化规律.黄晗等[15 ] 对不同密实度的JLU5型模拟月壤进行贯入阻力力学实验,得到模拟月壤的贯入特性曲线.王康等[16 ] 对CE5型模拟月壤进行触月压痕试验,通过偏最小支持向量机(LSSVM)由实验结果预测模拟月壤力学状态.田野等[17 ] 基于应力波反射法,借助霍普金森压杆试验装置,研究了模拟月壤受冲击特性.② 离散元仿真分析法.邹猛等[18 ] 采用颗粒流软件PFC 3D,设计离散元模拟三轴试验,测定了离散元月壤的剪切特性曲线与承载特性曲线.林呈祥等[19 ] 采用颗粒流软件PFC 2D研究了不同颗粒形状对离散元月壤抗剪特性的影响.黄晗等[15 ] 采用颗粒流软件EDEM,设计了离散元模拟圆锥贯入试验,研究了离散元月壤密实度与圆锥指数梯度的关系.林云成等[20 ] 采用PFC 2D,设计了足垫冲击离散元月壤的仿真试验,得到了冲击过程离散元月壤的动态变化情况.实际上,基于模拟月壤的方法难以模拟月面低重力环境,而基于离散元的方法难以模拟真实月壤颗粒的微观形态.由于跳跃过程受重力影响显著,离散元方法更加适合研究跳跃中的月壤力学特性.虽然,针对月壤力学特性种类的研究众多,但明确哪些特性在跳跃过程中起主导作用是实现月面可控跳跃的关键问题之一. ...
... [15 ]采用颗粒流软件EDEM,设计了离散元模拟圆锥贯入试验,研究了离散元月壤密实度与圆锥指数梯度的关系.林云成等[20 ] 采用PFC 2D,设计了足垫冲击离散元月壤的仿真试验,得到了冲击过程离散元月壤的动态变化情况.实际上,基于模拟月壤的方法难以模拟月面低重力环境,而基于离散元的方法难以模拟真实月壤颗粒的微观形态.由于跳跃过程受重力影响显著,离散元方法更加适合研究跳跃中的月壤力学特性.虽然,针对月壤力学特性种类的研究众多,但明确哪些特性在跳跃过程中起主导作用是实现月面可控跳跃的关键问题之一. ...
基于月面表取采样触月压痕的月壤力学状态分析
1
2021
... 目前,研究月壤力学特性的方法主要有两种:① 模拟月壤试分析法.张宇等[13 -14 ] 针对不同孔隙比的CAS-1型模拟月壤进行三轴实验,得到剪切特性曲线与承载特性曲线,并定性描述了模拟月壤阻尼比的变化规律.黄晗等[15 ] 对不同密实度的JLU5型模拟月壤进行贯入阻力力学实验,得到模拟月壤的贯入特性曲线.王康等[16 ] 对CE5型模拟月壤进行触月压痕试验,通过偏最小支持向量机(LSSVM)由实验结果预测模拟月壤力学状态.田野等[17 ] 基于应力波反射法,借助霍普金森压杆试验装置,研究了模拟月壤受冲击特性.② 离散元仿真分析法.邹猛等[18 ] 采用颗粒流软件PFC 3D,设计离散元模拟三轴试验,测定了离散元月壤的剪切特性曲线与承载特性曲线.林呈祥等[19 ] 采用颗粒流软件PFC 2D研究了不同颗粒形状对离散元月壤抗剪特性的影响.黄晗等[15 ] 采用颗粒流软件EDEM,设计了离散元模拟圆锥贯入试验,研究了离散元月壤密实度与圆锥指数梯度的关系.林云成等[20 ] 采用PFC 2D,设计了足垫冲击离散元月壤的仿真试验,得到了冲击过程离散元月壤的动态变化情况.实际上,基于模拟月壤的方法难以模拟月面低重力环境,而基于离散元的方法难以模拟真实月壤颗粒的微观形态.由于跳跃过程受重力影响显著,离散元方法更加适合研究跳跃中的月壤力学特性.虽然,针对月壤力学特性种类的研究众多,但明确哪些特性在跳跃过程中起主导作用是实现月面可控跳跃的关键问题之一. ...
Mechanical performance identification for lunar soil in lunar surface sampling
1
2021
... 目前,研究月壤力学特性的方法主要有两种:① 模拟月壤试分析法.张宇等[13 -14 ] 针对不同孔隙比的CAS-1型模拟月壤进行三轴实验,得到剪切特性曲线与承载特性曲线,并定性描述了模拟月壤阻尼比的变化规律.黄晗等[15 ] 对不同密实度的JLU5型模拟月壤进行贯入阻力力学实验,得到模拟月壤的贯入特性曲线.王康等[16 ] 对CE5型模拟月壤进行触月压痕试验,通过偏最小支持向量机(LSSVM)由实验结果预测模拟月壤力学状态.田野等[17 ] 基于应力波反射法,借助霍普金森压杆试验装置,研究了模拟月壤受冲击特性.② 离散元仿真分析法.邹猛等[18 ] 采用颗粒流软件PFC 3D,设计离散元模拟三轴试验,测定了离散元月壤的剪切特性曲线与承载特性曲线.林呈祥等[19 ] 采用颗粒流软件PFC 2D研究了不同颗粒形状对离散元月壤抗剪特性的影响.黄晗等[15 ] 采用颗粒流软件EDEM,设计了离散元模拟圆锥贯入试验,研究了离散元月壤密实度与圆锥指数梯度的关系.林云成等[20 ] 采用PFC 2D,设计了足垫冲击离散元月壤的仿真试验,得到了冲击过程离散元月壤的动态变化情况.实际上,基于模拟月壤的方法难以模拟月面低重力环境,而基于离散元的方法难以模拟真实月壤颗粒的微观形态.由于跳跃过程受重力影响显著,离散元方法更加适合研究跳跃中的月壤力学特性.虽然,针对月壤力学特性种类的研究众多,但明确哪些特性在跳跃过程中起主导作用是实现月面可控跳跃的关键问题之一. ...
基于应力波反射法的模拟月壤特性研究
1
2021
... 目前,研究月壤力学特性的方法主要有两种:① 模拟月壤试分析法.张宇等[13 -14 ] 针对不同孔隙比的CAS-1型模拟月壤进行三轴实验,得到剪切特性曲线与承载特性曲线,并定性描述了模拟月壤阻尼比的变化规律.黄晗等[15 ] 对不同密实度的JLU5型模拟月壤进行贯入阻力力学实验,得到模拟月壤的贯入特性曲线.王康等[16 ] 对CE5型模拟月壤进行触月压痕试验,通过偏最小支持向量机(LSSVM)由实验结果预测模拟月壤力学状态.田野等[17 ] 基于应力波反射法,借助霍普金森压杆试验装置,研究了模拟月壤受冲击特性.② 离散元仿真分析法.邹猛等[18 ] 采用颗粒流软件PFC 3D,设计离散元模拟三轴试验,测定了离散元月壤的剪切特性曲线与承载特性曲线.林呈祥等[19 ] 采用颗粒流软件PFC 2D研究了不同颗粒形状对离散元月壤抗剪特性的影响.黄晗等[15 ] 采用颗粒流软件EDEM,设计了离散元模拟圆锥贯入试验,研究了离散元月壤密实度与圆锥指数梯度的关系.林云成等[20 ] 采用PFC 2D,设计了足垫冲击离散元月壤的仿真试验,得到了冲击过程离散元月壤的动态变化情况.实际上,基于模拟月壤的方法难以模拟月面低重力环境,而基于离散元的方法难以模拟真实月壤颗粒的微观形态.由于跳跃过程受重力影响显著,离散元方法更加适合研究跳跃中的月壤力学特性.虽然,针对月壤力学特性种类的研究众多,但明确哪些特性在跳跃过程中起主导作用是实现月面可控跳跃的关键问题之一. ...
Study on characteristics of simulated lunar soil based on stress wave reflection method
1
2021
... 目前,研究月壤力学特性的方法主要有两种:① 模拟月壤试分析法.张宇等[13 -14 ] 针对不同孔隙比的CAS-1型模拟月壤进行三轴实验,得到剪切特性曲线与承载特性曲线,并定性描述了模拟月壤阻尼比的变化规律.黄晗等[15 ] 对不同密实度的JLU5型模拟月壤进行贯入阻力力学实验,得到模拟月壤的贯入特性曲线.王康等[16 ] 对CE5型模拟月壤进行触月压痕试验,通过偏最小支持向量机(LSSVM)由实验结果预测模拟月壤力学状态.田野等[17 ] 基于应力波反射法,借助霍普金森压杆试验装置,研究了模拟月壤受冲击特性.② 离散元仿真分析法.邹猛等[18 ] 采用颗粒流软件PFC 3D,设计离散元模拟三轴试验,测定了离散元月壤的剪切特性曲线与承载特性曲线.林呈祥等[19 ] 采用颗粒流软件PFC 2D研究了不同颗粒形状对离散元月壤抗剪特性的影响.黄晗等[15 ] 采用颗粒流软件EDEM,设计了离散元模拟圆锥贯入试验,研究了离散元月壤密实度与圆锥指数梯度的关系.林云成等[20 ] 采用PFC 2D,设计了足垫冲击离散元月壤的仿真试验,得到了冲击过程离散元月壤的动态变化情况.实际上,基于模拟月壤的方法难以模拟月面低重力环境,而基于离散元的方法难以模拟真实月壤颗粒的微观形态.由于跳跃过程受重力影响显著,离散元方法更加适合研究跳跃中的月壤力学特性.虽然,针对月壤力学特性种类的研究众多,但明确哪些特性在跳跃过程中起主导作用是实现月面可控跳跃的关键问题之一. ...
月壤静力学特性的离散元模拟
1
2008
... 目前,研究月壤力学特性的方法主要有两种:① 模拟月壤试分析法.张宇等[13 -14 ] 针对不同孔隙比的CAS-1型模拟月壤进行三轴实验,得到剪切特性曲线与承载特性曲线,并定性描述了模拟月壤阻尼比的变化规律.黄晗等[15 ] 对不同密实度的JLU5型模拟月壤进行贯入阻力力学实验,得到模拟月壤的贯入特性曲线.王康等[16 ] 对CE5型模拟月壤进行触月压痕试验,通过偏最小支持向量机(LSSVM)由实验结果预测模拟月壤力学状态.田野等[17 ] 基于应力波反射法,借助霍普金森压杆试验装置,研究了模拟月壤受冲击特性.② 离散元仿真分析法.邹猛等[18 ] 采用颗粒流软件PFC 3D,设计离散元模拟三轴试验,测定了离散元月壤的剪切特性曲线与承载特性曲线.林呈祥等[19 ] 采用颗粒流软件PFC 2D研究了不同颗粒形状对离散元月壤抗剪特性的影响.黄晗等[15 ] 采用颗粒流软件EDEM,设计了离散元模拟圆锥贯入试验,研究了离散元月壤密实度与圆锥指数梯度的关系.林云成等[20 ] 采用PFC 2D,设计了足垫冲击离散元月壤的仿真试验,得到了冲击过程离散元月壤的动态变化情况.实际上,基于模拟月壤的方法难以模拟月面低重力环境,而基于离散元的方法难以模拟真实月壤颗粒的微观形态.由于跳跃过程受重力影响显著,离散元方法更加适合研究跳跃中的月壤力学特性.虽然,针对月壤力学特性种类的研究众多,但明确哪些特性在跳跃过程中起主导作用是实现月面可控跳跃的关键问题之一. ...
Statics characteristics of lunar soil by DEM simulation
1
2008
... 目前,研究月壤力学特性的方法主要有两种:① 模拟月壤试分析法.张宇等[13 -14 ] 针对不同孔隙比的CAS-1型模拟月壤进行三轴实验,得到剪切特性曲线与承载特性曲线,并定性描述了模拟月壤阻尼比的变化规律.黄晗等[15 ] 对不同密实度的JLU5型模拟月壤进行贯入阻力力学实验,得到模拟月壤的贯入特性曲线.王康等[16 ] 对CE5型模拟月壤进行触月压痕试验,通过偏最小支持向量机(LSSVM)由实验结果预测模拟月壤力学状态.田野等[17 ] 基于应力波反射法,借助霍普金森压杆试验装置,研究了模拟月壤受冲击特性.② 离散元仿真分析法.邹猛等[18 ] 采用颗粒流软件PFC 3D,设计离散元模拟三轴试验,测定了离散元月壤的剪切特性曲线与承载特性曲线.林呈祥等[19 ] 采用颗粒流软件PFC 2D研究了不同颗粒形状对离散元月壤抗剪特性的影响.黄晗等[15 ] 采用颗粒流软件EDEM,设计了离散元模拟圆锥贯入试验,研究了离散元月壤密实度与圆锥指数梯度的关系.林云成等[20 ] 采用PFC 2D,设计了足垫冲击离散元月壤的仿真试验,得到了冲击过程离散元月壤的动态变化情况.实际上,基于模拟月壤的方法难以模拟月面低重力环境,而基于离散元的方法难以模拟真实月壤颗粒的微观形态.由于跳跃过程受重力影响显著,离散元方法更加适合研究跳跃中的月壤力学特性.虽然,针对月壤力学特性种类的研究众多,但明确哪些特性在跳跃过程中起主导作用是实现月面可控跳跃的关键问题之一. ...
模拟月壤颗粒形状特征及其对抗剪强度影响分析
1
2016
... 目前,研究月壤力学特性的方法主要有两种:① 模拟月壤试分析法.张宇等[13 -14 ] 针对不同孔隙比的CAS-1型模拟月壤进行三轴实验,得到剪切特性曲线与承载特性曲线,并定性描述了模拟月壤阻尼比的变化规律.黄晗等[15 ] 对不同密实度的JLU5型模拟月壤进行贯入阻力力学实验,得到模拟月壤的贯入特性曲线.王康等[16 ] 对CE5型模拟月壤进行触月压痕试验,通过偏最小支持向量机(LSSVM)由实验结果预测模拟月壤力学状态.田野等[17 ] 基于应力波反射法,借助霍普金森压杆试验装置,研究了模拟月壤受冲击特性.② 离散元仿真分析法.邹猛等[18 ] 采用颗粒流软件PFC 3D,设计离散元模拟三轴试验,测定了离散元月壤的剪切特性曲线与承载特性曲线.林呈祥等[19 ] 采用颗粒流软件PFC 2D研究了不同颗粒形状对离散元月壤抗剪特性的影响.黄晗等[15 ] 采用颗粒流软件EDEM,设计了离散元模拟圆锥贯入试验,研究了离散元月壤密实度与圆锥指数梯度的关系.林云成等[20 ] 采用PFC 2D,设计了足垫冲击离散元月壤的仿真试验,得到了冲击过程离散元月壤的动态变化情况.实际上,基于模拟月壤的方法难以模拟月面低重力环境,而基于离散元的方法难以模拟真实月壤颗粒的微观形态.由于跳跃过程受重力影响显著,离散元方法更加适合研究跳跃中的月壤力学特性.虽然,针对月壤力学特性种类的研究众多,但明确哪些特性在跳跃过程中起主导作用是实现月面可控跳跃的关键问题之一. ...
Analysis of particle shape characteristics of lunar soil simulant and its effect on shear strength
1
2016
... 目前,研究月壤力学特性的方法主要有两种:① 模拟月壤试分析法.张宇等[13 -14 ] 针对不同孔隙比的CAS-1型模拟月壤进行三轴实验,得到剪切特性曲线与承载特性曲线,并定性描述了模拟月壤阻尼比的变化规律.黄晗等[15 ] 对不同密实度的JLU5型模拟月壤进行贯入阻力力学实验,得到模拟月壤的贯入特性曲线.王康等[16 ] 对CE5型模拟月壤进行触月压痕试验,通过偏最小支持向量机(LSSVM)由实验结果预测模拟月壤力学状态.田野等[17 ] 基于应力波反射法,借助霍普金森压杆试验装置,研究了模拟月壤受冲击特性.② 离散元仿真分析法.邹猛等[18 ] 采用颗粒流软件PFC 3D,设计离散元模拟三轴试验,测定了离散元月壤的剪切特性曲线与承载特性曲线.林呈祥等[19 ] 采用颗粒流软件PFC 2D研究了不同颗粒形状对离散元月壤抗剪特性的影响.黄晗等[15 ] 采用颗粒流软件EDEM,设计了离散元模拟圆锥贯入试验,研究了离散元月壤密实度与圆锥指数梯度的关系.林云成等[20 ] 采用PFC 2D,设计了足垫冲击离散元月壤的仿真试验,得到了冲击过程离散元月壤的动态变化情况.实际上,基于模拟月壤的方法难以模拟月面低重力环境,而基于离散元的方法难以模拟真实月壤颗粒的微观形态.由于跳跃过程受重力影响显著,离散元方法更加适合研究跳跃中的月壤力学特性.虽然,针对月壤力学特性种类的研究众多,但明确哪些特性在跳跃过程中起主导作用是实现月面可控跳跃的关键问题之一. ...
着陆器足垫冲击月壤动态行为离散元仿真分析
1
2020
... 目前,研究月壤力学特性的方法主要有两种:① 模拟月壤试分析法.张宇等[13 -14 ] 针对不同孔隙比的CAS-1型模拟月壤进行三轴实验,得到剪切特性曲线与承载特性曲线,并定性描述了模拟月壤阻尼比的变化规律.黄晗等[15 ] 对不同密实度的JLU5型模拟月壤进行贯入阻力力学实验,得到模拟月壤的贯入特性曲线.王康等[16 ] 对CE5型模拟月壤进行触月压痕试验,通过偏最小支持向量机(LSSVM)由实验结果预测模拟月壤力学状态.田野等[17 ] 基于应力波反射法,借助霍普金森压杆试验装置,研究了模拟月壤受冲击特性.② 离散元仿真分析法.邹猛等[18 ] 采用颗粒流软件PFC 3D,设计离散元模拟三轴试验,测定了离散元月壤的剪切特性曲线与承载特性曲线.林呈祥等[19 ] 采用颗粒流软件PFC 2D研究了不同颗粒形状对离散元月壤抗剪特性的影响.黄晗等[15 ] 采用颗粒流软件EDEM,设计了离散元模拟圆锥贯入试验,研究了离散元月壤密实度与圆锥指数梯度的关系.林云成等[20 ] 采用PFC 2D,设计了足垫冲击离散元月壤的仿真试验,得到了冲击过程离散元月壤的动态变化情况.实际上,基于模拟月壤的方法难以模拟月面低重力环境,而基于离散元的方法难以模拟真实月壤颗粒的微观形态.由于跳跃过程受重力影响显著,离散元方法更加适合研究跳跃中的月壤力学特性.虽然,针对月壤力学特性种类的研究众多,但明确哪些特性在跳跃过程中起主导作用是实现月面可控跳跃的关键问题之一. ...
Simulation analysis of dynamic behavior of lander footpad impact on lunar regolith
1
2020
... 目前,研究月壤力学特性的方法主要有两种:① 模拟月壤试分析法.张宇等[13 -14 ] 针对不同孔隙比的CAS-1型模拟月壤进行三轴实验,得到剪切特性曲线与承载特性曲线,并定性描述了模拟月壤阻尼比的变化规律.黄晗等[15 ] 对不同密实度的JLU5型模拟月壤进行贯入阻力力学实验,得到模拟月壤的贯入特性曲线.王康等[16 ] 对CE5型模拟月壤进行触月压痕试验,通过偏最小支持向量机(LSSVM)由实验结果预测模拟月壤力学状态.田野等[17 ] 基于应力波反射法,借助霍普金森压杆试验装置,研究了模拟月壤受冲击特性.② 离散元仿真分析法.邹猛等[18 ] 采用颗粒流软件PFC 3D,设计离散元模拟三轴试验,测定了离散元月壤的剪切特性曲线与承载特性曲线.林呈祥等[19 ] 采用颗粒流软件PFC 2D研究了不同颗粒形状对离散元月壤抗剪特性的影响.黄晗等[15 ] 采用颗粒流软件EDEM,设计了离散元模拟圆锥贯入试验,研究了离散元月壤密实度与圆锥指数梯度的关系.林云成等[20 ] 采用PFC 2D,设计了足垫冲击离散元月壤的仿真试验,得到了冲击过程离散元月壤的动态变化情况.实际上,基于模拟月壤的方法难以模拟月面低重力环境,而基于离散元的方法难以模拟真实月壤颗粒的微观形态.由于跳跃过程受重力影响显著,离散元方法更加适合研究跳跃中的月壤力学特性.虽然,针对月壤力学特性种类的研究众多,但明确哪些特性在跳跃过程中起主导作用是实现月面可控跳跃的关键问题之一. ...
月壤工程地质特性综述
1
2013
... 测量离散元颗粒床的剪切特性参数并与月面月壤的对应参数[21 ] 进行比较,通过离散元月壤剪切特性仿真实验拟合内摩擦角和内聚力,迭代修正离散元颗粒参数,最终得到的颗粒床剪切特性参数如表1 所示,其中用于标定的真实月壤特性参考郑永春等[22 ] 基于美国苏联探月工程实验数据总结的就位月壤机械性质. ...
Review of engineer geological characteristics of lunar regolith
1
2013
... 测量离散元颗粒床的剪切特性参数并与月面月壤的对应参数[21 ] 进行比较,通过离散元月壤剪切特性仿真实验拟合内摩擦角和内聚力,迭代修正离散元颗粒参数,最终得到的颗粒床剪切特性参数如表1 所示,其中用于标定的真实月壤特性参考郑永春等[22 ] 基于美国苏联探月工程实验数据总结的就位月壤机械性质. ...
月壤的物理和机械性质
1
2004
... 测量离散元颗粒床的剪切特性参数并与月面月壤的对应参数[21 ] 进行比较,通过离散元月壤剪切特性仿真实验拟合内摩擦角和内聚力,迭代修正离散元颗粒参数,最终得到的颗粒床剪切特性参数如表1 所示,其中用于标定的真实月壤特性参考郑永春等[22 ] 基于美国苏联探月工程实验数据总结的就位月壤机械性质. ...
Physical and mechanical properties of lunar regolith
1
2004
... 测量离散元颗粒床的剪切特性参数并与月面月壤的对应参数[21 ] 进行比较,通过离散元月壤剪切特性仿真实验拟合内摩擦角和内聚力,迭代修正离散元颗粒参数,最终得到的颗粒床剪切特性参数如表1 所示,其中用于标定的真实月壤特性参考郑永春等[22 ] 基于美国苏联探月工程实验数据总结的就位月壤机械性质. ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}