Journal of Shanghai Jiaotong University ›› 2020, Vol. 54 ›› Issue (9): 973-980.doi: 10.16183/j.cnki.jsjtu.2020.146
• Guidance, Navigation and Control • Previous Articles Next Articles
ZHAO Jianxia1, DUAN Haibin1( ), ZHAO Yanjie2, FAN Yanming3, WEI Chen1
), ZHAO Yanjie2, FAN Yanming3, WEI Chen1
Received:2020-05-25
Online:2020-09-28
Published:2020-10-10
Contact:
DUAN Haibin
E-mail:hbduan@buaa.edu.cn
CLC Number:
ZHAO Jianxia, DUAN Haibin, ZHAO Yanjie, FAN Yanming, WEI Chen. Consensus Control of Manned-Unmanned Aerial Vehicle Swarm Based on Hierarchy Interaction of Pigeons[J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 973-980.

Fig.1
Diagram of a multi-channel operator model

Fig.2
Control structure of MUMS system
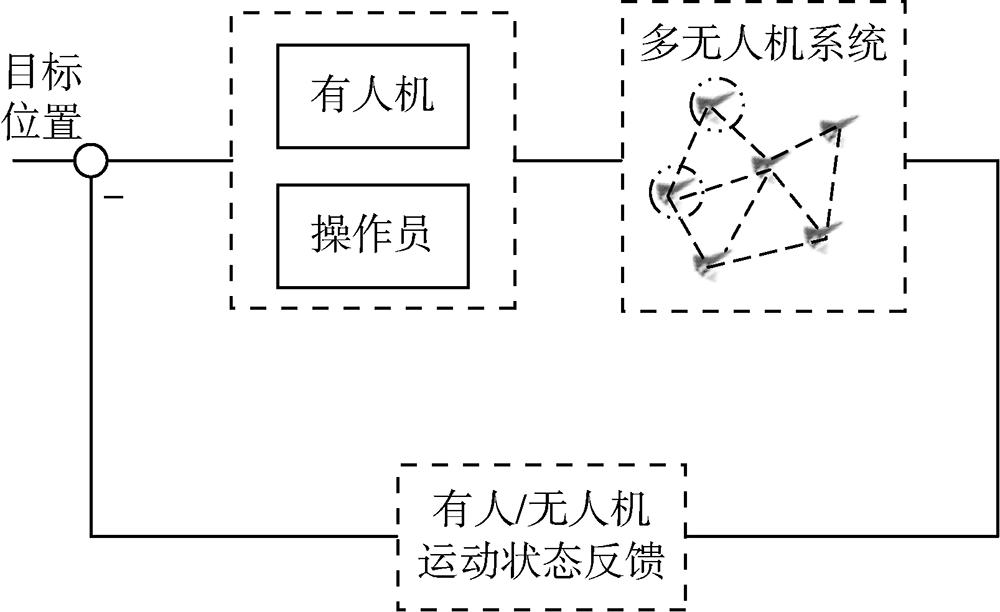
Fig.3
Hierarchical leadership network of pigeons
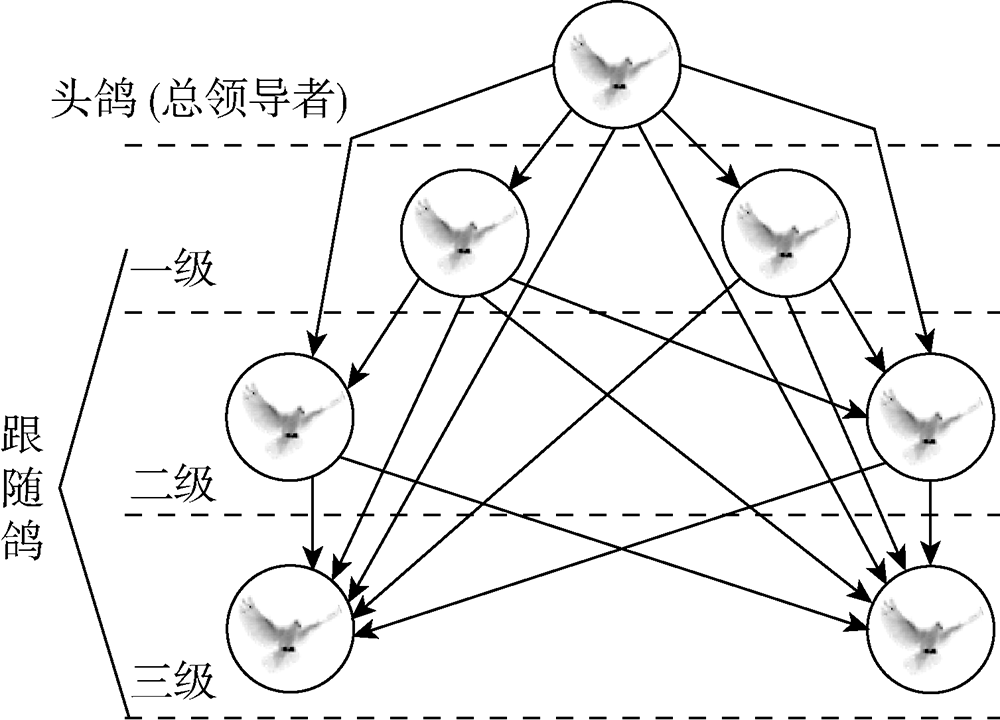
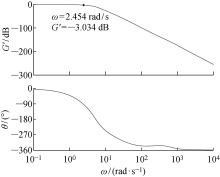
Fig.4
Closed-loop frequency response
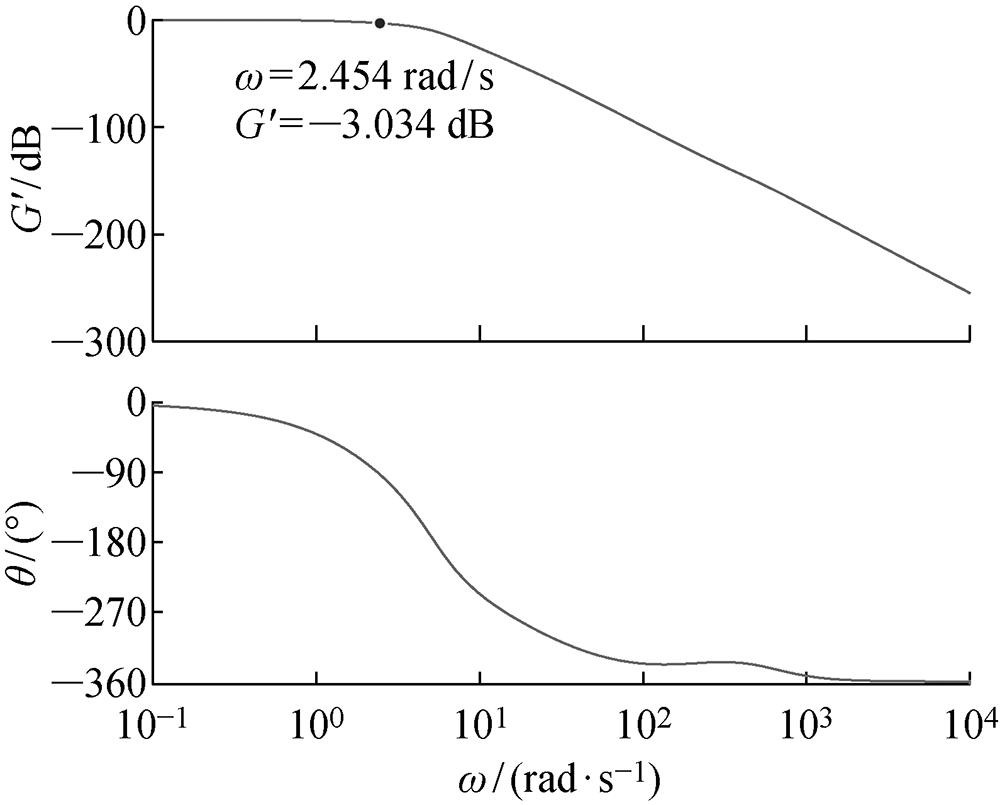
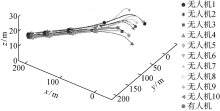
Fig.5
Three dimensional trajectory
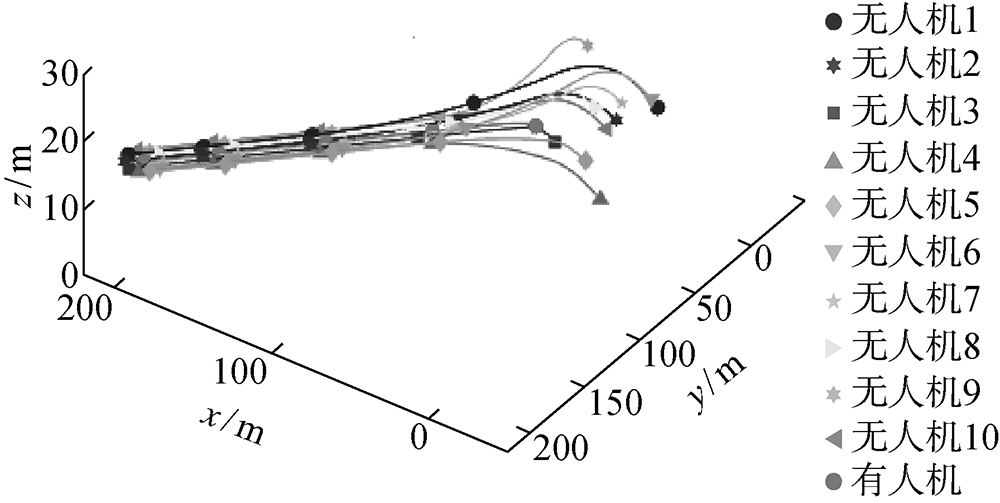

Fig.6
RMSE of MAV and UAVs

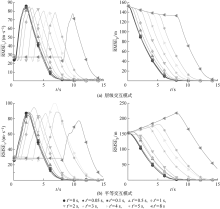
Fig.7
Effect of interaction delays in different modes
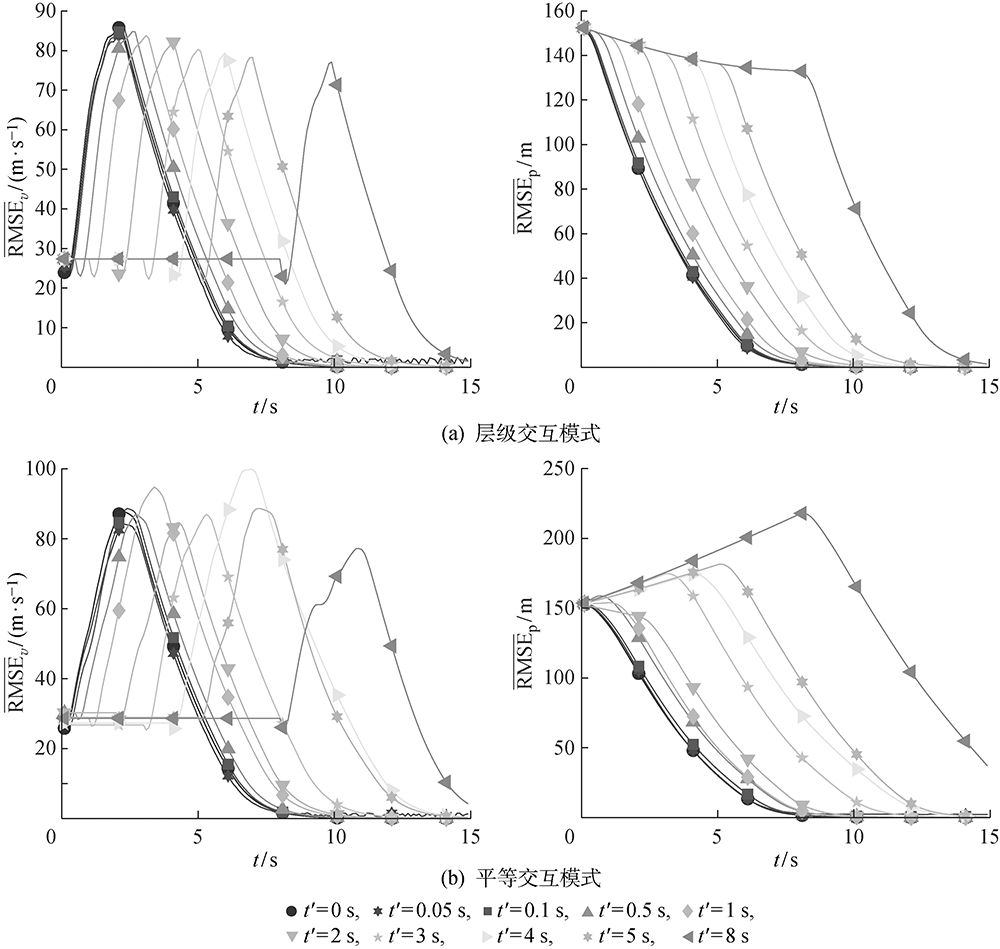

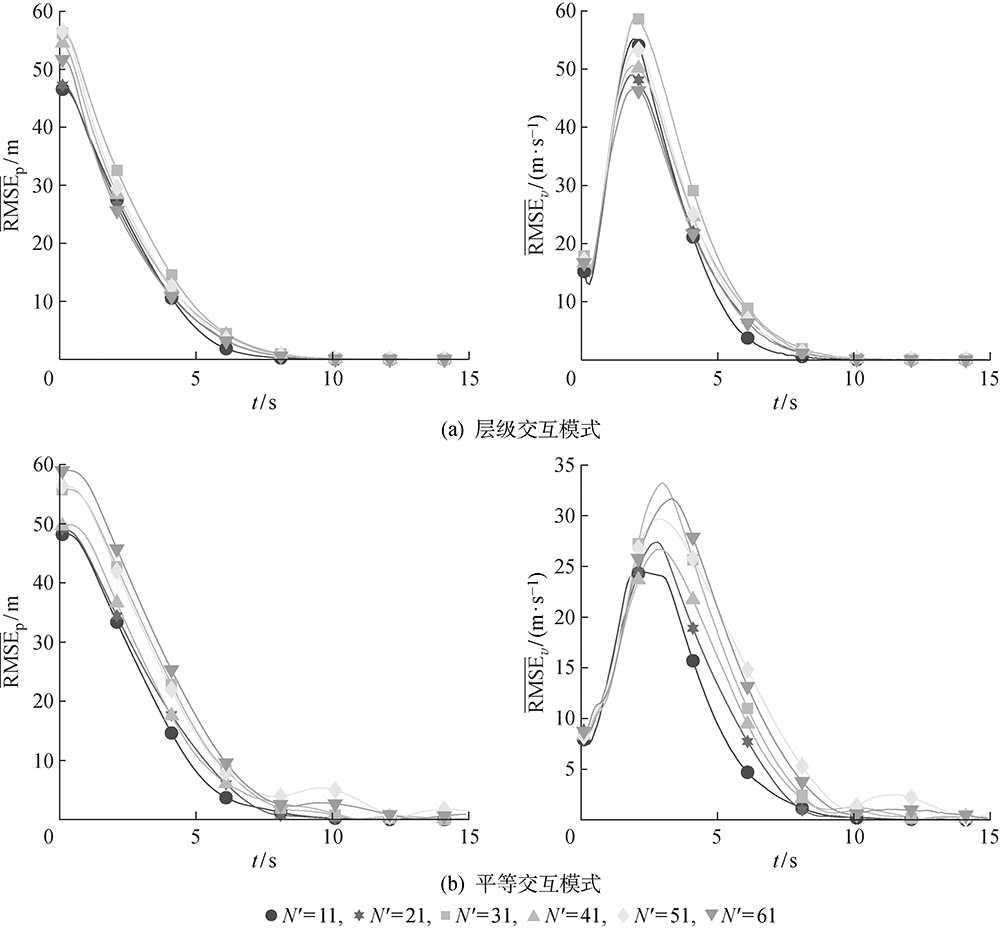
Fig.8
Effect of swarm numbers in different modes
| [1] | 牛轶峰, 沈林成, 李杰, 等. 无人-有人机协同控制关键问题[J]. 中国科学: 信息科学, 2019,49(5):538-554. |
| NIU Yifeng, SHEN Lincheng, LI Jie, et al. Key scientific problems in cooperation control of unmanned-manned aircraft systems[J]. Scientia Sinica (Informationis), 2019,49(5):538-554. | |
| [2] | 段海滨, 邱华鑫. 基于群体智能的无人机集群自主控制[M]. 北京: 科学出版社, 2018. |
| DUAN Haibin, QIU Huaxin. Unmanned aerial vehicle swarm autonomous control based on swarm intelligence[M]. Beijing: Science Press, 2018. | |
| [3] | CHEN J, XU J, DING L, et al. Limited intervention collaborative decision-making of MAV/UAV team based on FCM [C]//2016 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC). Piscataway, NJ, USA: IEEE, 2016: 1-6. |
| [4] | ZHONG Y, YAO P Y, ZHANG J Y, et al. Formation and adjustment of manned/unmanned combat aerial vehicle cooperative engagement system[J]. Journal of Systems Engineering and Electronics, 2018,29(4):756-767. |
| [5] | NAGY M, AKOS Z, BIRO D, et al. Hierarchical group dynamics in pigeon flocks[J]. Nature, 2010,464(7290):890-893. |
| [6] | NAGY M, VASARHELYI G, PETTIT B, et al. Context-dependent hierarchies in pigeons[J]. PNAS, 2013,110(32):13049-13054. |
| [7] | ZAFEIRIS A, VICSEK T. Advantages of hierarchical organization: From pigeon flocks to optimal network structures[M] //Research in the Decision Sciences for Global Business: Best Papers from the 2013 Annual Conference. London: Pearson FT Press, 2015: 21-34. |
| [8] | FLACK A, BIRO D, GUILFORD T, et al. Modelling group navigation: Transitive social structures improve navigational performance[J]. Journal of the Royal Society, Interface, 2015,12(108):20150213. |
| [9] | LUO Q N, DUAN H B. Distributed UAV flocking control based on homing pigeon hierarchical strategies[J]. Aerospace Science and Technology, 2017,70:257-264. |
| [10] | QU Z H. An impact equivalence principle of separating control designs for networked heterogeneous affine systems[J]. IFAC Proceedings Volumes, 2012,45(26):210-215. |
| [11] | NIEUWENHUIZEN F M, ZAAL P M T, MULDER M, et al. Modeling human multichannel perception and control using linear time-invariant models[J]. Journal of Guidance, Control, and Dynamics, 2008,31(4):999-1013. |
| [12] | ABBINK D A, MULDER M, VAN DER HELM F C T, et al. Measuring neuromuscular control dynamics during car following with continuous haptic feedback[J]. IEEE Transactions on Systems, Man, and Cybernetics. Part B, Cybernetics: A Publication of the IEEE Systems, Man, and Cybernetics Society, 2011,41(5):1239-1249. |
| [13] | OLIVARI M, NIEUWENHUIZEN F M, VENROOIJ J, et al. Methods for multiloop identification of visual and neuromuscular pilot responses[J]. IEEE Transactions on Cybernetics, 2015,45(12):2780-2791. |
| [14] | PETTIT B, PERNA A, BIRO D, et al. Interaction rules underlying group decisions in homing pigeons[J]. Journal of the Royal Society, Interface, 2013,10(89):20130529. |
| [15] | QIU H X, DUAN H B. Multiple UAV distributed close formation control based on in-flight leadership hierarchies of pigeon flocks[J]. Aerospace Science and Technology, 2017,70:471-486. |
| [16] | 邱华鑫, 段海滨, 范彦铭. 基于鸽群行为机制的多无人机自主编队[J]. 控制理论与应用, 2015,32(10):1298-1304. |
| QIU Huaxin, DUAN Haibin, FAN Yanming. Multiple unmanned aerial vehicle autonomous formation based on the behavior mechanism in pigeon flocks[J]. Control Theory & Applications, 2015,32(10):1298-1304. | |
| [17] | ZHOU B L, YANG Y Q, XU X Y. The group-delay consensus for second-order multi-agent systems by piecewise adaptive pinning control in part of time interval[J]. Physica A: Statistical Mechanics and its Applications, 2019,513:694-708. |
| [18] | ATMAN M W S, HATANAKA T, QU Z H, et al. Motion synchronization for semi-autonomous robotic swarm with a passivity-short human operator[J]. International Journal of Intelligent Robotics and Applications, 2018,2(2):235-251. |
| [19] | 邱华鑫, 段海滨, 范彦铭, 等. 鸽群交互模式切换模型及其同步性分析[J/OL]. (2020-12-05)[2020-06-16]. https://kns.cnki.net/KCMS/detail/23.1538.TP.20191205.1011.004.html. |
| QIU Huaxin, DUAN Haibin, FAN Yanming, et al. Pigeon flock interaction pattern switching model and its synchronization analysis [J/OL]. (2020-12-05)[2020-06-16]. https://kns.cnki.net/KCMS/detail/23.1538.TP.20191205.1011.004.html. |
| [1] | XU Chenhui, YU Fanghui, HE Defeng. Disturbance-Blocking-Based Distributed Receding Horizon Estimation of Flexible Joint Robots [J]. Journal of Shanghai Jiao Tong University, 2022, 56(7): 868-876. |
| [2] | MAO Yingzhong, FENG Zhiyong, GUO Huiru. Static Output Feedback Control of Vehicle Active Front Steering Considering Multiple Performance Constraints [J]. Journal of Shanghai Jiao Tong University, 2022, 56(2): 156-164. |
| [3] | DING Ming, MENG Shuai, WANG Shuheng, XIA Xi. Neural-Network-Based Adaptive Feedback Linearization Control for 6-DOF Wave Compensation Platform [J]. Journal of Shanghai Jiao Tong University, 2022, 56(2): 165-172. |
| [4] | YU Te, WANG Lei. Algorithm and Experimental Verification of Self-Assembling Platform Based on Cooperative Control [J]. Journal of Shanghai Jiao Tong University, 2021, 55(11): 1493-1498. |
| [5] | MEI Rong. Safe Flight Control of Unmanned Helicopter Under Forest Environment [J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 994-999. |
| [6] | LI Pengbo, YUAN Mingzhe, XIAO Jinchao, XIONG Junfeng. Station Keeping Guidance Strategy Based on Course Constraint for Unmanned Surface Vehicles [J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 987-993. |
| [7] | CHEN Longsheng, WANG Qi, HE Guoyi. Adaptive Control of Non-Affine Pure Feedback Nonlinear Switching Systems [J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 981-986. |
| [8] | WANG Zhiwen, LIU Wei. Event-Triggered Generalized Predictive Control of Cyber-Physical Systems Under Denial-of-Service Attacks [J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 910-915. |
| [9] | HE Defeng, PENG Binbin, GU Yujia, YU Shiming. Learning Predictive Control of Vehicular Automated Cruise Systems Based on Gaussian Process Regression [J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 904-909. |
| [10] | LIU Qiu, ZHAO Dongya. Discrete-Time Integral Sliding Mode Predictive Control for Single Input Single Output Systems [J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 898-903. |
| [11] | HE Hongwei, ZOU Zaojian, ZENG Zhihua. Adaptive NN-SM Control for Path Following of Underactuated Surface Vessels [J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 890-897. |
| [12] | WU Zhi-Wei, WU Yong-Jian, CHAI Tian-You. Intelligent Control of Fused Magnesium Furnaces Based on SPSA [J]. Journal of Shanghai Jiaotong University, 2011, 45(08): 1095-1100. |
| [13] | ZHANG Zhi, HU Li-Sheng. Estimation of Performance Benchmark for a Class of Nonlinear Control Systems [J]. Journal of Shanghai Jiaotong University, 2011, 45(08): 1101-1104. |
| [14] | HAN Xiao-Dong-1, BAO Cui-Mei-2, ZHANG Deng-Feng-3. Robust Control Based on LMI for Satellite Attitude Control Systems [J]. Journal of Shanghai Jiaotong University, 2011, 45(08): 1146-1150. |
| [15] | CHU Ji-Zheng, DU Bin, CHEN Juan. Performance Analysis and Online Fuzzy Self-Tuning of RTD-A Controller’s Parameters [J]. Journal of Shanghai Jiaotong University, 2011, 45(08): 1167-1171. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||