Journal of Shanghai Jiao Tong University ›› 2021, Vol. 55 ›› Issue (11): 1493-1498.doi: 10.16183/j.cnki.jsjtu.2020.415
Special Issue: 《上海交通大学学报》2021年12期专题汇总专辑; 《上海交通大学学报》2021年“自动化技术、计算机技术”专题
• Innovation and Design • Previous Articles
YU Tea, WANG Leia,b( )
)
Received:2020-12-11
Online:2021-11-28
Published:2021-12-03
Contact:
WANG Lei
E-mail:wanglei@sjtu.edu.cn
CLC Number:
YU Te, WANG Lei. Algorithm and Experimental Verification of Self-Assembling Platform Based on Cooperative Control[J]. Journal of Shanghai Jiao Tong University, 2021, 55(11): 1493-1498.
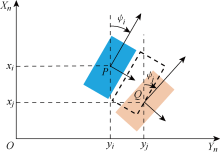
Fig.1
Earth-fixed and body-fixed reference frames

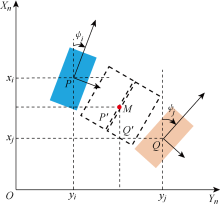
Fig.2
Dynamic reference point M
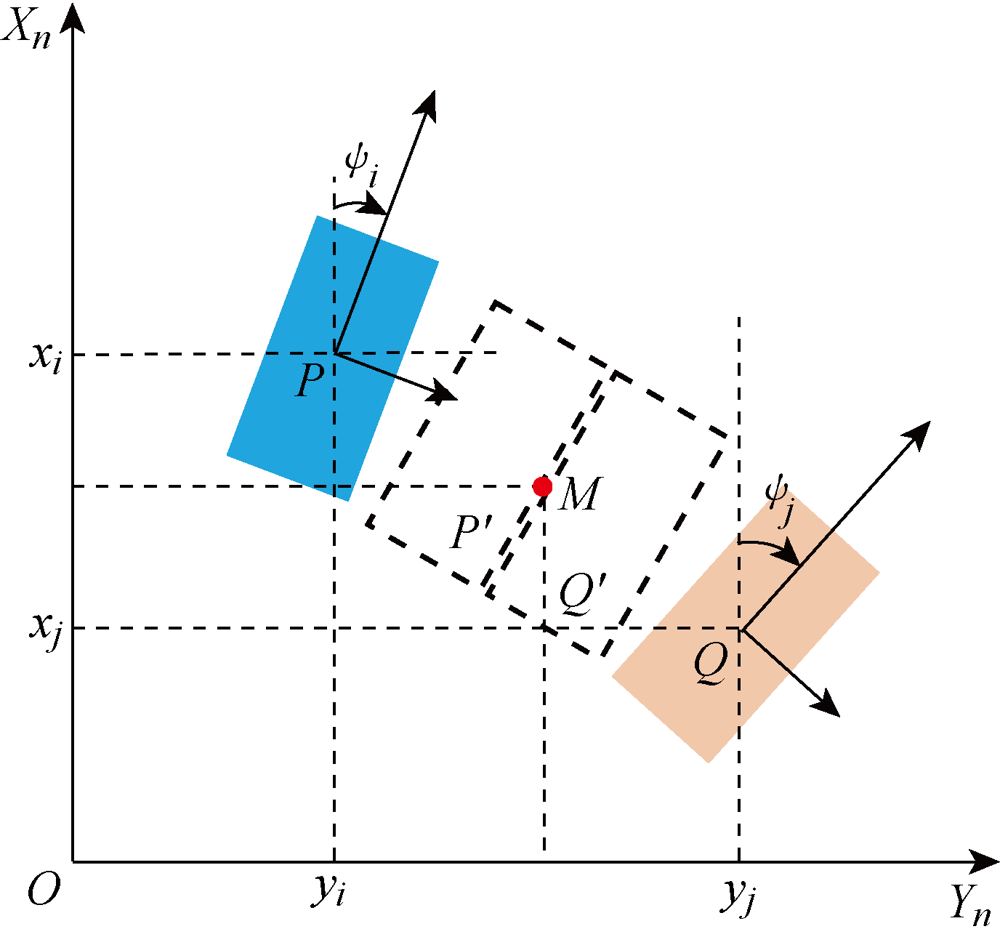

Fig.3
Thruster arrangement
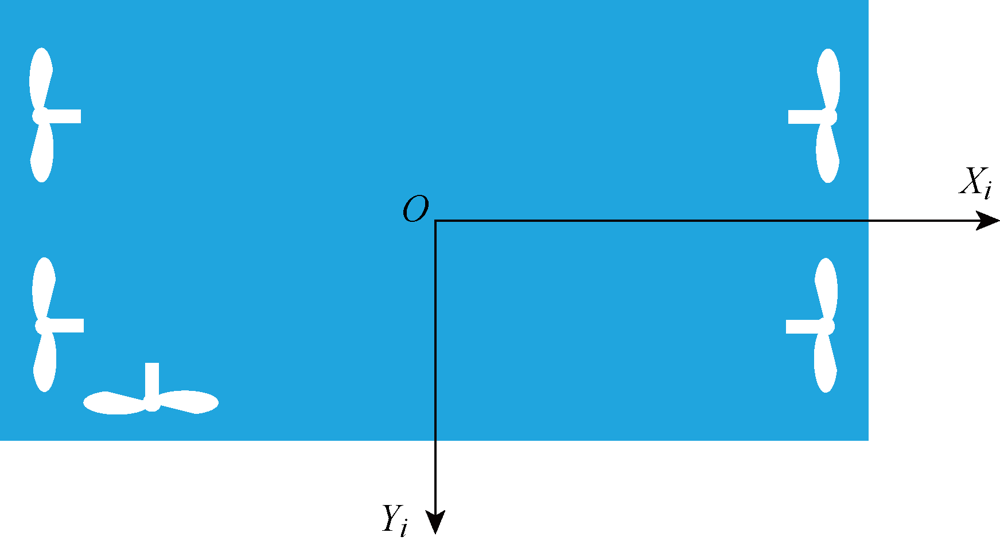

Fig.4
Hardware arrangement of a single module
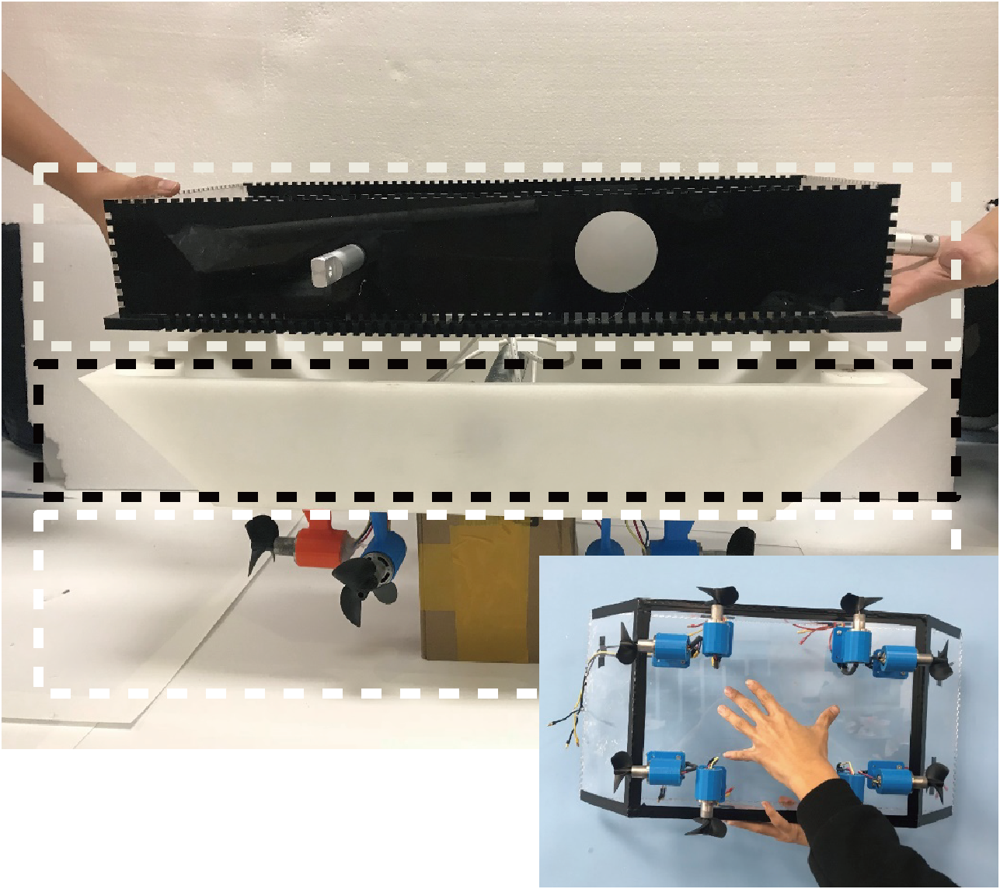
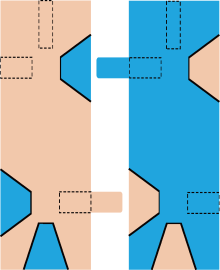
Fig.5
Sample of docking method
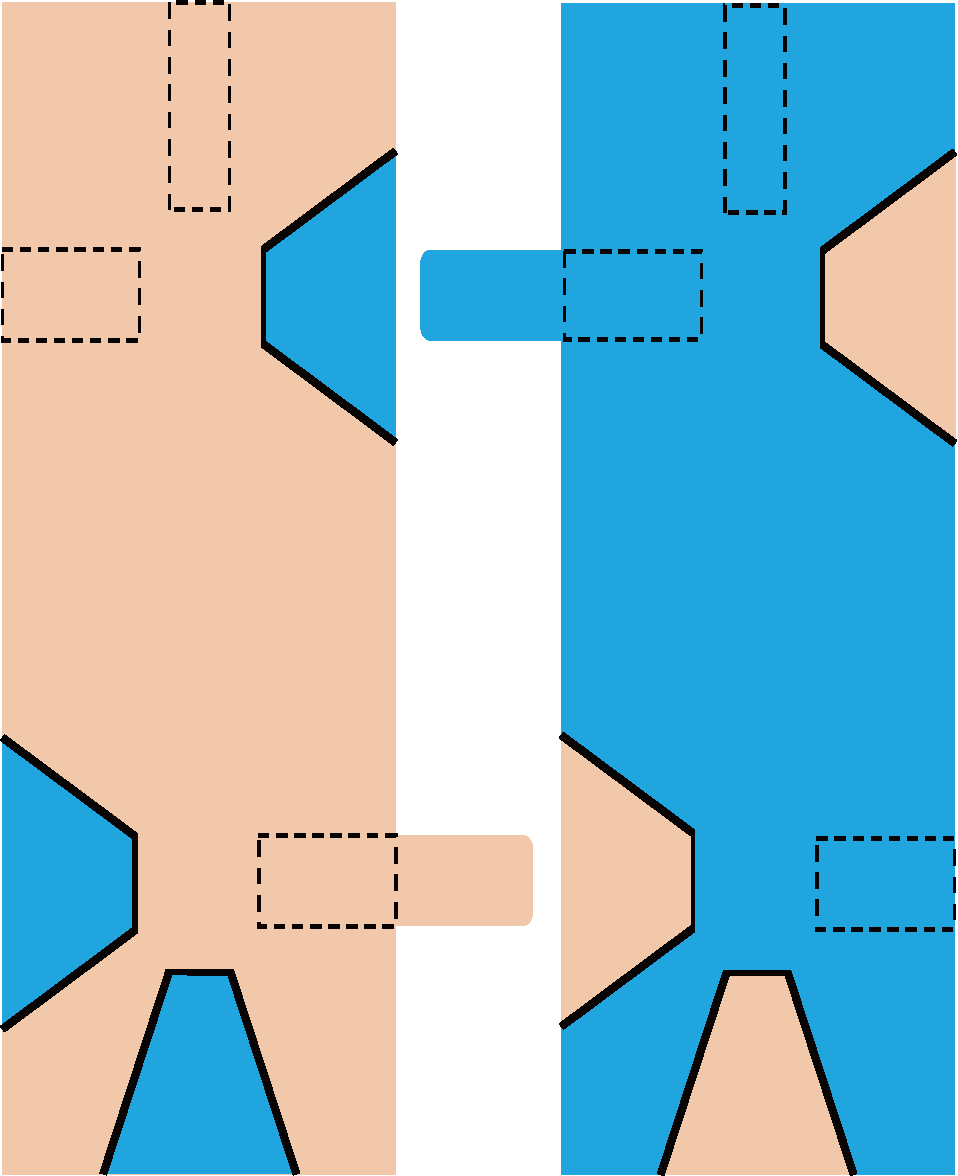

Fig.6
Docking completed
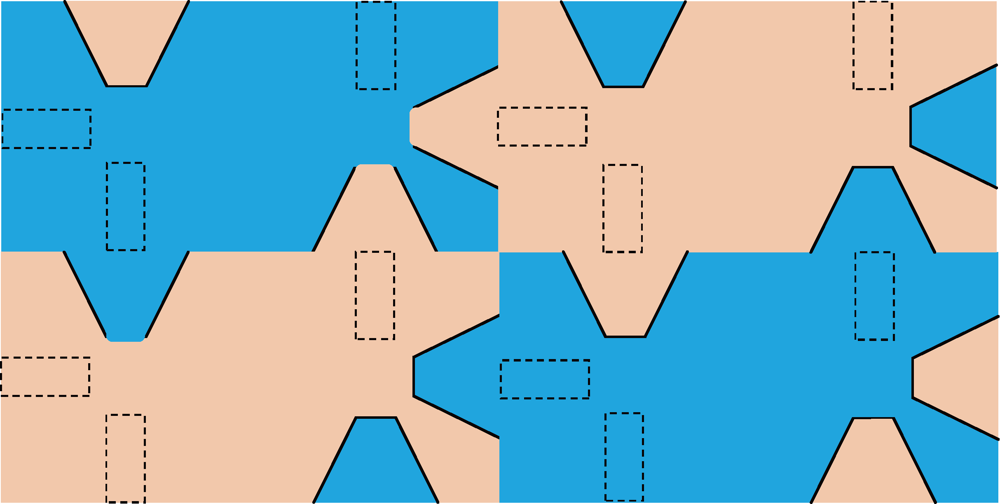

Fig.7
Trajectories of four modules
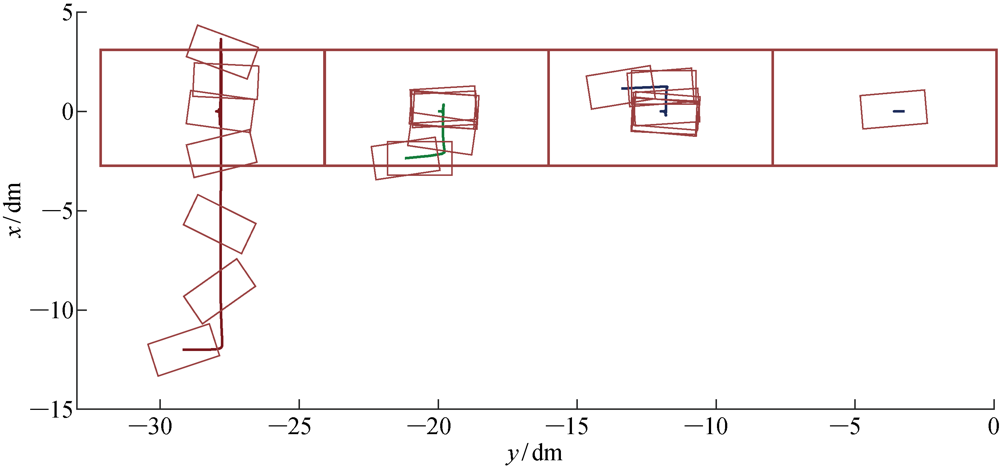

Fig.8
Procedure of combination of four modules
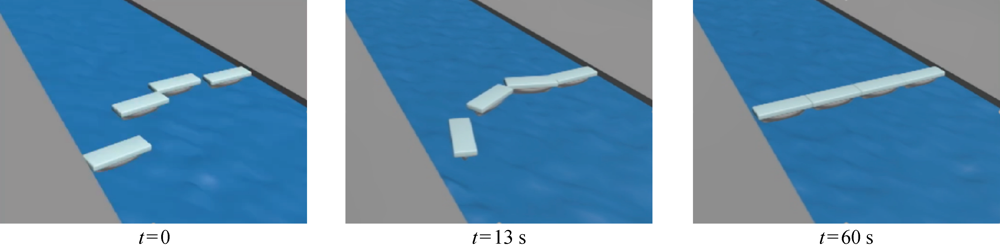

Fig.9
Tracking error of module


Fig.10
Autonomous docking of four modules
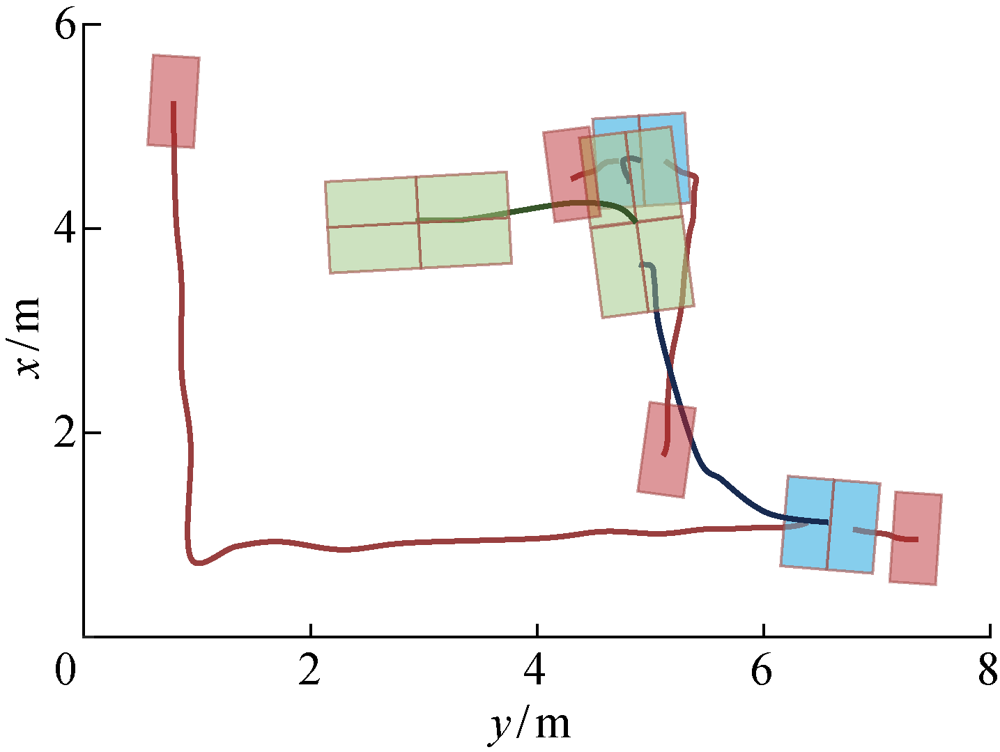

Fig.11
Procedure of combination of text modules

| [1] | 杨振华, 冷沙. 管窥外军典型无人化作战装备[J]. 军事文摘, 2020(19):31-34. |
| YANG Zhenhua, LENG Sha. On typical unmanned combat equipment of foreign army[J]. Military Digest, 2020(19):31-34. | |
| [2] | 张伟, 廖煜雷, 姜峰, 等. 无人水面艇技术发展回顾与趋势分析[J]. 无人系统技术, 2019, 2(6):1-9. |
| ZHANG Wei, LIAO Yulei, JIANG Feng, et al. Development review and trend analysis of unmanned surface vehicles technology[J]. Unmanned Systems Technology, 2019, 2(6):1-9. | |
| [3] | 熊勇, 余嘉俊, 张加, 等. 无人艇研究进展及发展方向[J]. 船舶工程, 2020, 42(2):I0010-I0017. |
| XIONG Yong, YU Jiajun, ZHANG Jia, et al. Research progress and development direction of unmanned aerial vehicle[J]. Ship Engineering, 2020, 42(2):I0010-I0017. | |
| [4] | QUEIROZ FILHO A N, TANNURI E A. Experimental results of cooperative control applied to multi-vessel DP operations[C]// Proceedings of ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering. Nantes, France: ASME, 2013. |
| [5] | QUEIROZ FILHO A N, TANNURI E A. Cooperative control applied to DP systems-numerical analysis[J]. IFAC Proceedings Volumes, 2013, 46(33):268-273. |
| [6] | CONG P W, MAGEE A R, JAIMAN R, et al. Hydrodynamic analysis including shielding effects and advanced DP controls for improved uptime of a floatel connected to an FPSO by a gangway[C]// Proceedings of the Offshore Technology Conference Asia. Kuala Lumpur, Malaysia: Offshore Technology Conference, 2018. |
| [7] | FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. Hoboken, USA: Wiley, 2011. |
| [1] | DAI Yi, CHEN Zuogang, WANG Fei. Uncertainty Analysis of Offshore Platform Wind Load Tests [J]. Journal of Shanghai Jiao Tong University, 2022, 56(3): 361-367. |
| [2] |
JIANG Xiaoming, WANG Xufeng, ZHANG Weifang, LIU Yigang.
Coarse-fine Compound Axis Cooperative Control Strategy Optimization for Laser Tracking & Aiming System
[J]. Air & Space Defense, 2019, 2(3): 31-37.
|
| [3] | ZHANG Yong-wei. Discussion on the Destruction of Offshore Platform Induced by Bohai Sea Ice and Countermeasures for Reducing Disasters [J]. Ocean Engineering Equipment and Technology, 2018, 5(增刊): 83-86. |
| [4] | JIANG Yu-fei , WU Bin-bin , HAN Jing-yan , SHEN Jian, LI Xiao-ming, HUANG Hai-long. Calculation of Structural Modification about Accommodation on Offshore Platform Based on SACS [J]. Ocean Engineering Equipment and Technology, 2018, 5(增刊): 144-148. |
| [5] | CHEN Xin, LI Dong-fang. Engineering Optimization for Reducing the Effect of Smoke Diffusion on Marine Helideck [J]. Ocean Engineering Equipment and Technology, 2018, 5(6): 380-383. |
| [6] | WU Xin-yi, CUI Jin, NIE Yan, HUO Fa-li, WANG Ning. Calculation of Horizontal Wave Impact Loads and Its Application to Local Structure Design of Column Stabilized Units [J]. Ocean Engineering Equipment and Technology, 2018, 5(4): 259-265. |
| [7] | ZHANG Xiao-yu. Suppression Methods of Transformer Inrush Current in Offshore Platform [J]. Ocean Engineering Equipment and Technology, 2018, 5(3): 214-217. |
| [8] | SUN Jun, LIU Lei, LIU Xin-wei, JIA Dong-hui, HUANG Lei. Failure Analysis and Maintenance of Flameproof Surface Shafts for Medium-Sized High-Voltage Flameproof Motor [J]. Ocean Engineering Equipment and Technology, 2018, 5(3): 218-222. |
| [9] | MA Yun-xu-zi, GAO Di-ju, WANG Xiao-yu. Analysis on Protection of DC Zone Distribution System of Offshore Platform Drilling Device [J]. Ocean Engineering Equipment and Technology, 2018, 5(1): 53-57. |
| [10] | LIU Guo-feng, WAN Guang-fen, GAO Xuan. Research on Power System for Large Capacity Electrically Driven Compressors on Offshore Platform [J]. Ocean Engineering Equipment and Technology, 2018, 5(1): 58-62. |
| [11] | ZHANG Ming, SHANG Chao, WANG Hai-yan, ZHENG Xiao-peng, WANG Chun-sheng. Prospect of Offshore Electrostatic Coalescence Crude Oil Dehydration Technology [J]. Ocean Engineering Equipment and Technology, 2017, 4(2): 86-90. |
| [12] | ZHU Min-ying, WANG Wen-jie. Study on Construction Technology of Deck Covering for POD-5 [J]. Ocean Engineering Equipment and Technology, 2017, 4(2): 105-108. |
| [13] | WANG Bin. Research on Emergency Shutdown Logic Optimization of Offshore Platform [J]. Ocean Engineering Equipment and Technology, 2017, 4(1): 53-57. |
| [14] | HUI Ning, GAO Peng, PANG Fu-zhen, SHEN Zhi-heng, MA Bang-yong. Relation Between Noise Level in Living Quarter and Door Arrangement of Main Engine Room on Offshore Platform [J]. Ocean Engineering Equipment and Technology, 2016, 3(2): 140-144. |
| [15] | Zhi-sheng DU, Jin-jin XU, Chao MA, Fa ZHANG. Research on Polymer Flooding Equipment Arrangement of SZ 36-1 Oilfield [J]. Ocean Engineering Equipment and Technology, 2015, 2(3): 163-167. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 955
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 652
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||