Journal of Shanghai Jiaotong University ›› 2020, Vol. 54 ›› Issue (9): 981-986.doi: 10.16183/j.cnki.jsjtu.2020.137
• Guidance, Navigation and Control • Previous Articles Next Articles
CHEN Longsheng( ), WANG Qi, HE Guoyi
), WANG Qi, HE Guoyi
Received:2020-05-18
Online:2020-09-28
Published:2020-10-10
CLC Number:
CHEN Longsheng, WANG Qi, HE Guoyi. Adaptive Control of Non-Affine Pure Feedback Nonlinear Switching Systems[J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 981-986.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2020.137
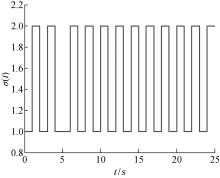
Fig.1
Switching signal
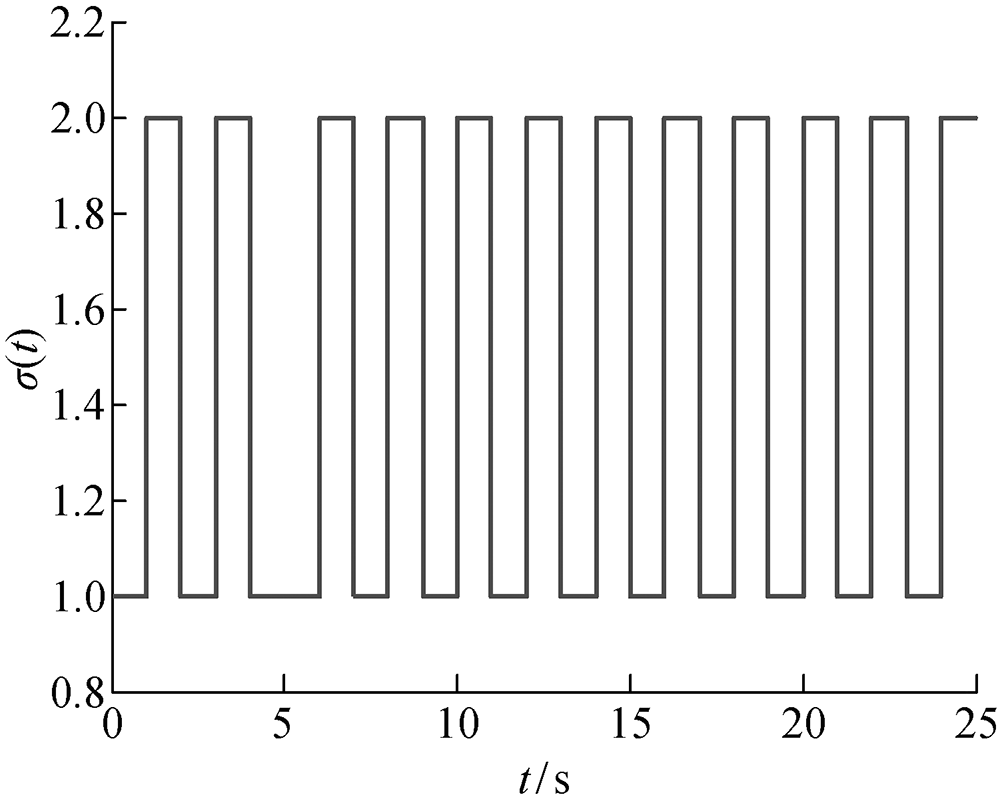
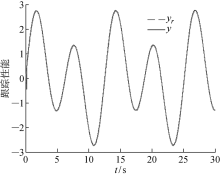
Fig.2
System output and desired trajectory


Fig.3
Tracking error
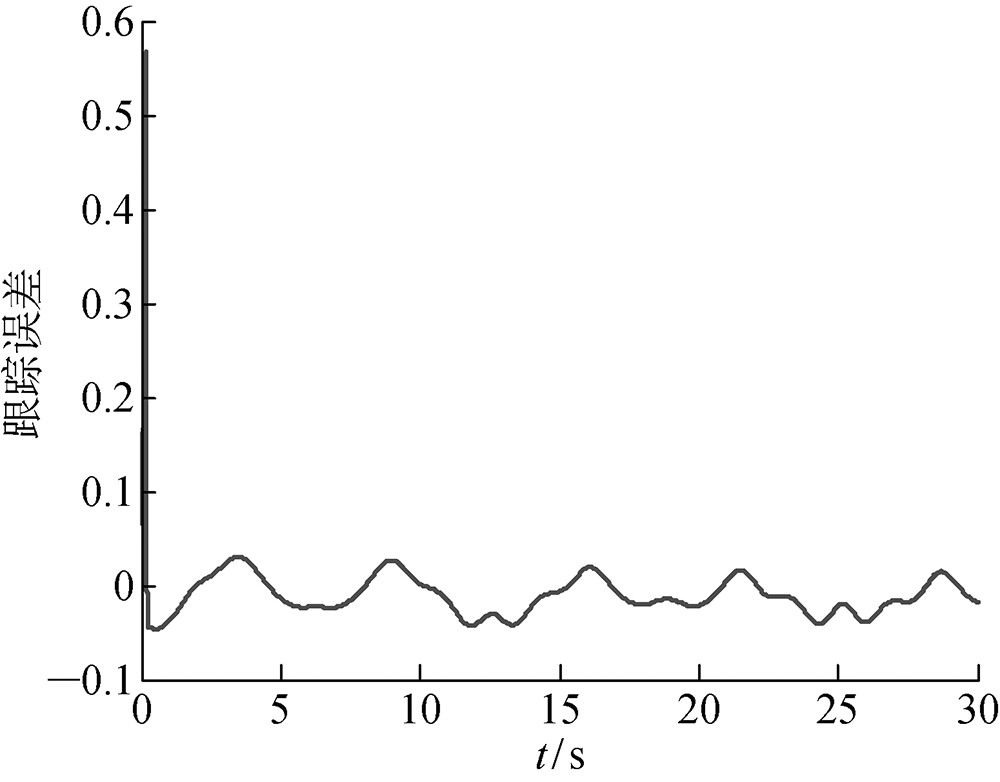
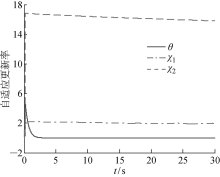
Fig.4
Update laws of parameters

| [1] | 司文杰, 董训德, 王聪. 输入饱和的一类切换系统神经网络跟踪控制[J]. 自动化学报, 2017,43(8):1383-1392. |
| SI Wenjie, DONG Xunde, WANG Cong. Adaptive neural tracking control design for a class of uncertain switched nonlinear systems with input saturation[J]. Acta Automatica Sinica, 2017,43(8):1383-1392. | |
| [2] | YU Z X, DONG Y, LI S G. Adaptive tracking control for switched strict-feedback nonlinear systems with time-varying delays and asymmetric saturation actuators[J]. Neurocomputing, 2017,238:245-254. |
| [3] | ZHAI D, AN L W, DONG J X, et al. Switched adaptive fuzzy tracking control for a class of switched nonlinear systems under arbitrary switching[J]. IEEE Transactions on Fuzzy Systems, 2018,26(2):585-507. |
| [4] | ZHAI D, XI C J, AN L W, et al. Prescribed performance switched adaptive dynamic surface control of switched nonlinear systems with average dwell time[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017,47(7):1257-1269. |
| [5] | LI Y X, YANG G H. Approximation-based adaptive neural output feedback control for a class of uncertain switched stochastic nonlinear systems with average dwell time condition[J]. Neurocomputing, 2016,186:160-169. |
| [6] | LONG L J, ZHAO J. Adaptive disturbance rejection for strict-feedback switched nonlinear systems using multiple Lyapunov functions[J]. International Journal of Robust and Nonlinear Control, 2014,24(13):1887-1902. |
| [7] | LONG L J, ZHAO J. Adaptive fuzzy tracking control of switched uncertain nonlinear systems with unstable subsystems[J]. Fuzzy Sets and Systems, 2015,273:49-67. |
| [8] | SWAROOP D, HEDRICK J K, YIP P P, et al. Dynamic surface control for a class of nonlinear systems[J]. IEEE Transactions on Automatic Control, 2000,45(10):1893-1899. |
| [9] | ZHAI D, XI C J, AN L W, et al. Prescribed performance switched adaptive dynamic surface control of switched nonlinear systems with average dwell time[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017,47(7):1257-1269. |
| [10] | ZHAI D, AN L W, DONG J X, et al. Switched adaptive fuzzy tracking control for a class of switched nonlinear systems under arbitrary switching[J]. IEEE Transactions on Fuzzy Systems, 2018,26(2):585-597. |
| [11] | CHEN L S, WANG Q. Prescribed performance-barrier Lyapunov function for the adaptive control of unknown pure-feedback systems with full-state constraints[J]. Nonlinear Dynamics, 2019,95(3):2443-2459. |
| [12] | CHEN M, SHAO S Y, JIANG B. Adaptive neural control of uncertain nonlinear systems using distur-bance observer[J]. IEEE Transactions on Cybernetics, 2017,47(10):3110-3123. |
| [13] | LIU Y J, TONG S C, WANG W. Adaptive fuzzy output tracking control for a class of uncertain nonli-near systems[J]. Fuzzy Sets and Systems, 2009,160(19):2727-2754. |
| [14] | RYAN E P. A universal adaptive stabilizer for a class of nonlinear systems[J]. Systems & Control Letters, 1991,16(3):209-218. |
| [1] | ZENG Guozhi, WEI Ziqing, YUE Bao, DING Yunxiao, ZHENG Chunyuan, ZHAI Xiaoqiang. Energy Consumption Prediction of Office Buildings Based on CNN-RNN Combined Model [J]. Journal of Shanghai Jiao Tong University, 2022, 56(9): 1256-1261. |
| [2] | WU Shuchen, QI Zongfeng, LI Jianxun. Intelligent Global Sensitivity Analysis Based on Deep Learning [J]. Journal of Shanghai Jiao Tong University, 2022, 56(7): 840-849. |
| [3] | QUAN Daying, CHEN Yun, TANG Zeyu, LI Shitong, WANG Xiaofeng, JIN Xiaoping. Radar Signal Recognition Based on Dual Channel Convolutional Neural Network [J]. Journal of Shanghai Jiao Tong University, 2022, 56(7): 877-885. |
| [4] | QIN Pengfei (秦鹏飞), WANG Xiaoliang∗ (王晓亮). Construction on Aerodynamic Surrogate Model of Stratospheric Airship [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(6): 768-779. |
| [5] | SU Hong1 (苏 红), WU Bozhao2 (吴博钊), MAO Xuchu1∗ (茅旭初). Non-Line-of-Sight Multipath Detection Method for BDS/GPS Fusion System Based on Deep Learning [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(6): 844-854. |
| [6] | LÜ Qibing (吕其兵), LIU Tianyuan (刘天元), ZHANG Rong (张荣), JIANG Yanan (江亚南), XIAO Lei (肖雷), BAO Jingsong∗ (鲍劲松). Generation Approach of Human-Robot Cooperative Assembly Strategy Based on Transfer Learning [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(5): 602-613. |
| [7] | QIN Yichao, HUANG Limin, WANG Xiao, MA Xuewen, DUAN Wenyang, HAO Wei. Feasibility of Wave Measurement by Using a Sailing Buoy and the Artificial Neural Network Technique [J]. Journal of Shanghai Jiao Tong University, 2022, 56(4): 498-505. |
| [8] | ZHAO Yong, SU Dan. Rogue Wave Prediction Based on Four Combined Long Short-Term Memory Neural Network Models [J]. Journal of Shanghai Jiao Tong University, 2022, 56(4): 516-522. |
| [9] | LIU Min (刘 敏), YI Ming (易 鸣), WU Minghu∗ (武明虎), WANG Juan (王 娟), HE Yu (何 宇). Breast Pathological Image Classification Based on VGG16 Feature Concatenation [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(4): 473-484. |
| [10] | JIANG Zhiguo (蒋志国), CHANG Qing∗ (常 青). USSL Net: Focusing on Structural Similarity with Light U-Structure for Stroke Lesion Segmentation [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(4): 485-497. |
| [11] | LU Guannan1 (卢冠男), WANG Mengling1∗ (王梦灵), FOX Tamara2, JIANG Peng3 (蒋 鹏), JIANG Fusong3 (蒋伏松). Novel Indicators for Adverse Glycemic Events Detection Analysis Based on Continuous Glucose Monitoring Neural Network Predictive Models [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(4): 498-504. |
| [12] | DING Ming, MENG Shuai, WANG Shuheng, XIA Xi. Neural-Network-Based Adaptive Feedback Linearization Control for 6-DOF Wave Compensation Platform [J]. Journal of Shanghai Jiao Tong University, 2022, 56(2): 165-172. |
| [13] | LIU Xiuli, XU Xiaoli. A Fault Diagnosis Method Based on Feature Pyramid CRNN Network [J]. Journal of Shanghai Jiao Tong University, 2022, 56(2): 182-190. |
| [14] | YUAN Xiaoqi (袁筱祺), ZHU Lelan (朱乐兰), XU Qiongfan(徐琼凡), GAO Wei (高玮). Risk Prediction Model of Gallbladder Disease in Shanghai Middle-Aged and Elderly People Based on Neural Networks [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(2): 153-159. |
| [15] | NIE Rui, WANG Hongru. Fault Diagnosis of UAV Formation Actuator Based on Neural Network Observer [J]. Air & Space Defense, 2022, 5(2): 32-41. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||