Journal of Shanghai Jiao Tong University ›› 2022, Vol. 56 ›› Issue (2): 165-172.doi: 10.16183/j.cnki.jsjtu.2020.424
Previous Articles Next Articles
DING Ming1, MENG Shuai1( ), WANG Shuheng1, XIA Xi2
), WANG Shuheng1, XIA Xi2
Received:2020-12-14
Online:2022-02-28
Published:2022-03-03
Contact:
MENG Shuai
E-mail:mengshuai001@sjtu.edu.cn
CLC Number:
DING Ming, MENG Shuai, WANG Shuheng, XIA Xi. Neural-Network-Based Adaptive Feedback Linearization Control for 6-DOF Wave Compensation Platform[J]. Journal of Shanghai Jiao Tong University, 2022, 56(2): 165-172.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2020.424
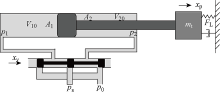
Fig.1
Schematic diagram of structure of asymmetric hydraulic system
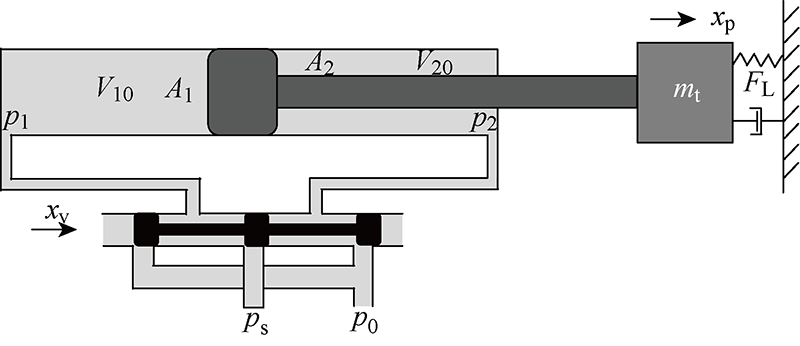
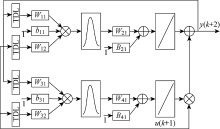
Fig.2
Identification model of RBFNN NARMA_L2

Fig.3
Block diagram of RBFNN feedback linearized adaptive control system
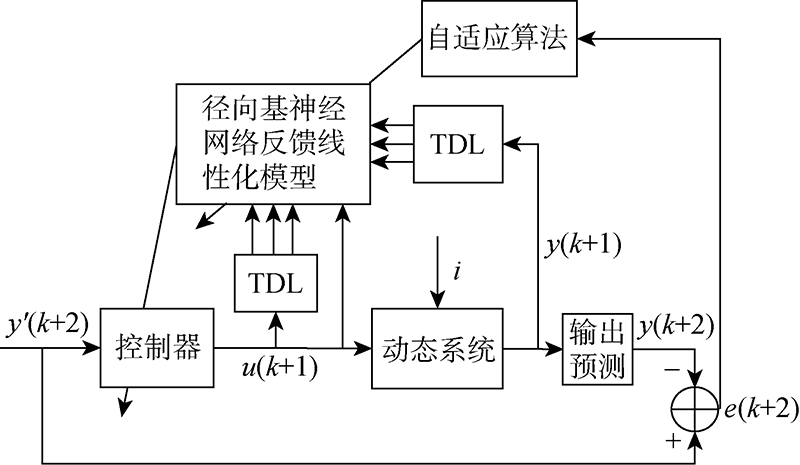

Fig.4
Curves of step interference signal tracking and error
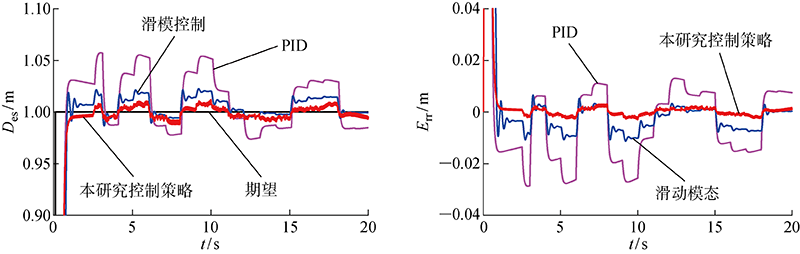
Fig.5
Wave curve of five-level wave
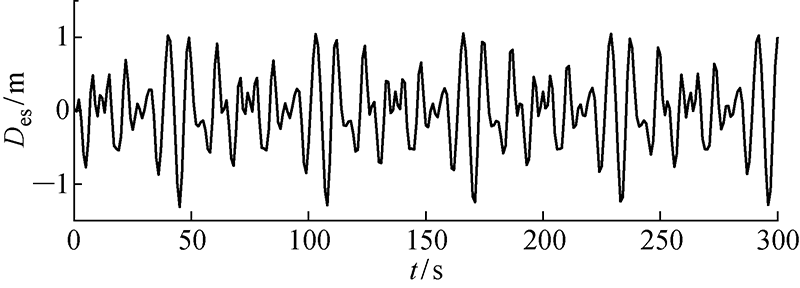
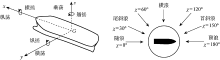
Fig.6
6-DOF and angle of encounter of hull
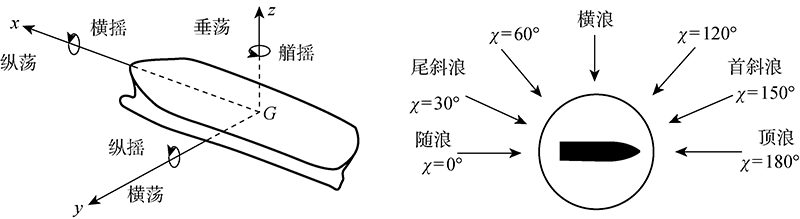
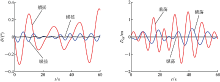
Fig.7
Wave response at 90° angle of encounter and level 5 waves of hull

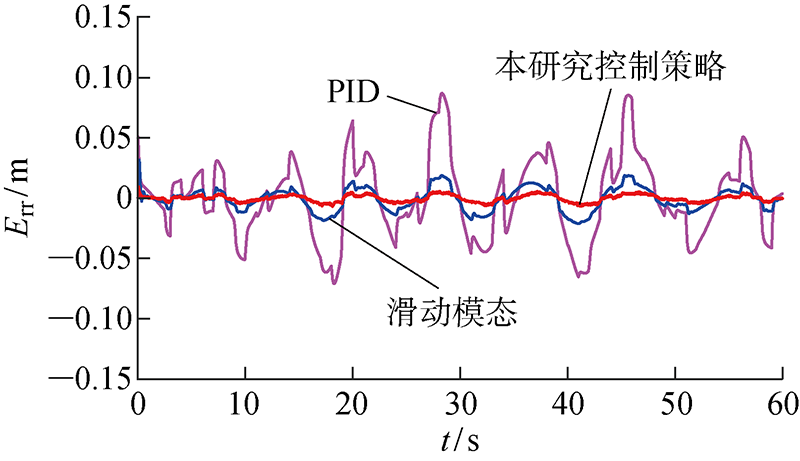
Fig.8
Curves of signal tracking error of level 5 wave
| [1] | HASHIMOTO K, WATANABE M, TASHIRO S, et al. Missing of the ROV Kaiko vehicle-problem on the secondary cable[J]. Oceans, 2004(2):804-811. |
| [2] | SALZMANN D J. Ampelmann: Development of the access system for offshore wind turbines[M]. Oisterwijk: BOX Press, 2010: 133-162. |
| [3] | 胡永攀. 六自由度并联波浪补偿系统设计与控制关键技术研究[D]. 长沙: 国防科学技术大学, 2015. |
| HU Yongpan. Research on key technologies of design and control of parallel weave compensation system with six DOFs[D]. Changsha: National University of Defense Technology, 2015. | |
| [4] | 赵华, 唐文献, 李存军, 等. 基于反馈线性化的电液伺服系统线性二次型最优控制[J]. 机床与液压, 2016, 44(19):51-55. |
| ZHAO Hua, TANG Wenxian, LI Cunjun, et al. Linear quadratic optimal control of electro-hydraulic servo system based on feedback linearization[J]. Machine Tool & Hydraulics, 2016, 44(19):51-55. | |
| [5] | 何常玉, 施光林, 郭秦阳, 等. 阀控非对称液压缸位置控制系统自适应鲁棒控制策略[J]. 上海交通大学学报, 2019, 53(2):209-216. |
| HE Changyu, SHI Guanglin, GUO Qinyang, et al. Adaptive robust control strategy of valve controlled asymmetric cylinder position control system[J]. Journal of Shanghai Jiao Tong University, 2019, 53(2):209-216. | |
| [6] | 高翔, 冯正进. 电液伺服系统研究中的非线性分析方法[J]. 上海交通大学学报, 2002, 36(3):306-310. |
| GAO Xiang, FENG Zhengjin. Nonlinear analysis method for research of electro-hydraulic servo system[J]. Journal of Shanghai Jiao Tong University, 2002, 36(3):306-310. | |
| [7] | 苗中华, 王旭永, 刘成良, 等. 基于滑模变结构控制的液压伺服系统超低速轨迹跟踪[J]. 上海交通大学学报, 2008, 42(7):1182-1186. |
| MIAO Zhonghua, WANG Xuyong, LIU Chengliang, et al. The trajectory tracking of hydraulic servo system via sliding mode variable structure control in very low velocity[J]. Journal of Shanghai Jiao Tong University, 2008, 42(7):1182-1186. | |
| [8] |
ŞAHIN S. Learning feedback linearization using artificial neural networks[J]. Neural Processing Letters, 2016, 44(3):625-637.
doi: 10.1007/s11063-015-9484-8 URL |
| [9] | 贺宏伟, 邹早建, 曾智华. 欠驱动水面船舶的自适应神经网络-滑模路径跟随控制[J]. 上海交通大学学报, 2020, 54(9):890-897. |
| HE Hongwei, ZOU Zaojian, ZENG Zhihua. Adaptive NN-SM control for path following of underactuated surface vessels[J]. Journal of Shanghai Jiao Tong University, 2020, 54(9):890-897. | |
| [10] | 李成刚, 崔文, 尤晶晶, 等. 多连杆柔性关节机器人的神经网络自适应反演控制[J]. 上海交通大学学报, 2016, 50(7):1095-1101. |
| LI Chenggang, CUI Wen, YOU Jingjing, et al. Neural network adaptive backstepping control of multi-link flexible-joint robots[J]. Journal of Shanghai Jiao Tong University, 2016, 50(7):1095-1101. | |
| [11] | 黄新民, 吴智政, 许晓鸣. 一类非线性系统反馈线性化的遗传神经网络实现[J]. 上海交通大学学报, 1997, 31(6):40-44. |
| HUANG Xinmin, WU Zhizheng, XU Xiaoming. Linearising feedback of one class of nonlinear system with application of genetic evoloved neural network[J]. Journal of Shanghai Jiao Tong University, 1997, 31(6):40-44. | |
| [12] | 宋学伟, 马玲玲, 黄天仑, 等. T形管液压成形自适应径向基函数优化设计[J]. 上海交通大学学报, 2017, 51(11):1340-1347. |
| SONG Xuewei, MA Lingling, HUANG Tianlun, et al. The loading path optimization for T-shape tube hydroforming using adaptive radial basis function[J]. Journal of Shanghai Jiao Tong University, 2017, 51(11):1340-1347. | |
| [13] | 钟有博. 六自由度并联平台的建模与仿真研究[D]. 天津: 天津工业大学, 2016. |
| ZHONG Youbo. Modeling and simulation of 6-DOF parallel platform[D]. Tianjin: Tianjin Polytechnic University, 2016. | |
| [14] |
WEI Y, WANG A, HAN H. Ocean wave active compensation analysis of inverse kinematics for hybrid boarding system based on fuzzy algorithm[J]. Ocean Engineering, 2019, 182:577-583.
doi: 10.1016/j.oceaneng.2019.03.059 URL |
| [15] | TAGHIRAD H D. Parallel robots[M]. Boca Raton: CRC Press, 2013. |
| [16] |
YANG J, CHEN Z X, ZENG L, et al. Uniform switched control strategy of valve-controlled asymmetric hydraulic system[J]. The Journal of Engineering, 2019, 2019(13):314-318.
doi: 10.1049/tje2.v2019.13 URL |
| [17] |
NARENDRA K S, MUKHOPADHYAY S. Adaptive control using neural networks and approximate models[J]. IEEE Transactions on Neural Networks, 1997, 8(3):475-485.
doi: 10.1109/TNN.72 URL |
| [18] |
PEDRO J O, DANGOR M, DAHUNSI O A, et al. Dynamic neural network-based feedback linearization control of full-car suspensions using PSO[J]. Applied Soft Computing, 2018, 70:723-736.
doi: 10.1016/j.asoc.2018.06.002 URL |
| [19] |
FAN Y J, HUANG X, WANG Z, et al. Improved quasi-synchronization criteria for delayed fractional-order memristor-based neural networks via linear feedback control[J]. Neurocomputing, 2018, 306:68-79.
doi: 10.1016/j.neucom.2018.03.060 URL |
| [20] |
MORENO-VALENZUELA J, MONTOYA-CHÁIREZ J, SANTIBÁÑEZ V. Robust trajectory tracking control of an underactuated control moment gyroscope via neural network-based feedback linearization[J]. Neurocomputing, 2020, 403:314-324.
doi: 10.1016/j.neucom.2020.04.019 URL |
| [21] |
NARENDRA K S, PARTHASARATHY K. Identification and control of dynamical systems using neural networks[J]. IEEE Transactions on Neural Networks, 1990, 1(1):4-27.
doi: 10.1109/72.80202 URL |
| [22] | 乔倩, 范菊. 滤波器模型对不规则海浪的模拟研究[C]//第三十一届全国水动力学研讨会论文集. 北京: 法律出版社, 2020: 818-824. |
| QIAO Qian, FAN Ju. Research on simulation of irregular sea wave with filter model[C]//Proceedings of the 31st National Symposium on Hydrodynamics. Beijing: Law Press, 2020: 818-824. | |
| [23] | YIN Y, REN H X, LIU X W. Real-time wave simulation based on wave spectrum used in marine simulator [C]//The 7th International Conference on System Simulation and Scientific Computing. Beijing: International Academic Publishers, 2008: 82-86. |
| [1] | YUAN Dongdong (袁冬冬), WANG Yankai∗ (王彦恺). Data Driven Model-Free Adaptive Control Method for Quadrotor Trajectory Tracking Based on Improved Sliding Mode Algorithm [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(6): 790-798. |
| [2] | JIN Haochun, GE Minhui, XU Bo. Optimization of DFIG Comprehensive Adaptive Frequency Regulation Parameters Based on Extreme Learning Machine [J]. Journal of Shanghai Jiao Tong University, 2021, 55(S2): 42-50. |
| [3] | SHI Qiang (师 强), ZHANG Jianlin (张建林), YANG Ming∗ (杨 明). Curvature Adaptive Control Based Path Following for Automatic Driving Vehicles in Private Area [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(5): 690-698. |
| [4] | FU Hao, ZHOU Bohua, MA Mengchen. Adaptive Sliding Mode Guidance Law with Prescribed Performance [J]. Air & Space Defense, 2020, 3(3): 63-70. |
| [5] | YAO Laipeng, HOU Baolin, LIU Xi. Adaptive Terminal Sliding Mode Control of a Howitzer Shell Transfer Arm with Friction Compensation [J]. Journal of Shanghai Jiaotong University, 2020, 54(2): 144-151. |
| [6] | GUO Qinyang,SHI Guanglin,WANG Dongmei. Composite Adaptive Control for Electro-Hydraulic Servo System Under Interval Excitation Condition [J]. Journal of Shanghai Jiaotong University, 2019, 53(6): 639-646. |
| [7] | HU Hao-long, LONG Lei, SHEN Xue, ZHANG Wan-liang. Research on Pressure Compensator Used for Deep-Sea Hydraulic System [J]. Ocean Engineering Equipment and Technology, 2018, 5(增刊): 209-213. |
| [8] | ZHANG Peng-fei. Simulation and Analysis of Low-Pressure Charging and Gate Valve Operation of Deepwater Subsea Hydraulic System Based on SimulationX [J]. Ocean Engineering Equipment and Technology, 2018, 5(2): 113-120. |
| [9] | Xue Changsen, Qi Zhidong, Shan Liang, Tang Pengliang. Design of Fractional Order MRAC Based on the Hyper Stability Theory [J]. Air & Space Defense, 2018, 1(1): 44-49. |
| [10] | Xinhua SHI, Zhifeng ZHOU. Research of Adaptive Flux Weakening Strategy of Permanent Magnet Synchronous Motor [J]. Research and Exploration in Laboratory, 2017, 36(5): 40-43. |
| [11] | WANG Xi, ZUO Xin, MA Tian-ran, YE Tian-yuan, WANG Feng, LIU Hai-jun. Study on the High Pressure Oil Return of Subsea Christmas Tree Hydraulic Control System [J]. Ocean Engineering Equipment and Technology, 2016, 3(5): 297-304. |
| [12] | LONG Hai-hui (龙海辉), ZHAO Jian-kang*(赵健康), LAI Jian-qing (赖剑清). H∞ Inverse Optimal Adaptive Fault-Tolerant Attitude Control for Flexible Spacecraft with Input Saturation [J]. Journal of shanghai Jiaotong University (Science), 2015, 20(5): 513-527. |
| [13] | YANG Qing-zhao (杨青照), ZHOU Ming* (周明), TIAN Hong-sen (田洪森),ZHANG Hui-sheng (张惠生), XU Dong-hui(许东晖). Simulation of Adaptive Control Strategy for Electrical Discharge Machining Process [J]. Journal of shanghai Jiaotong University (Science), 2015, 20(4): 408-414. |
| [14] | LI Jinsonga,YANG Lianb,WANG Letiana. Control of Small Scale Quad-Rotor Helicopter Using Adaptive Control-Optimization [J]. Journal of Shanghai Jiaotong University, 2015, 49(02): 202-208. |
| [15] | LIU Tao (刘 涛), ZHANG Wei-jing (张维竞), MA Jie (马 捷). Robust Adaptive Horizontal Vibration Isolation of Towed Seismic Streamers [J]. Journal of shanghai Jiaotong University (Science), 2012, 17(1): 31-039. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||