Journal of Shanghai Jiaotong University ›› 2020, Vol. 54 ›› Issue (9): 994-999.doi: 10.16183/j.cnki.jsjtu.2020.155
• Guidance, Navigation and Control • Previous Articles Next Articles
MEI Rong( )
)
Received:2020-03-30
Online:2020-09-28
Published:2020-10-10
CLC Number:
MEI Rong. Safe Flight Control of Unmanned Helicopter Under Forest Environment[J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 994-999.
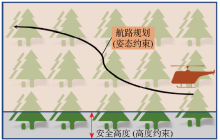
Fig.1
Schematic diagram of altitude and attitude limitations for unmanned helicopter


Fig.2
Error of altitude tracking
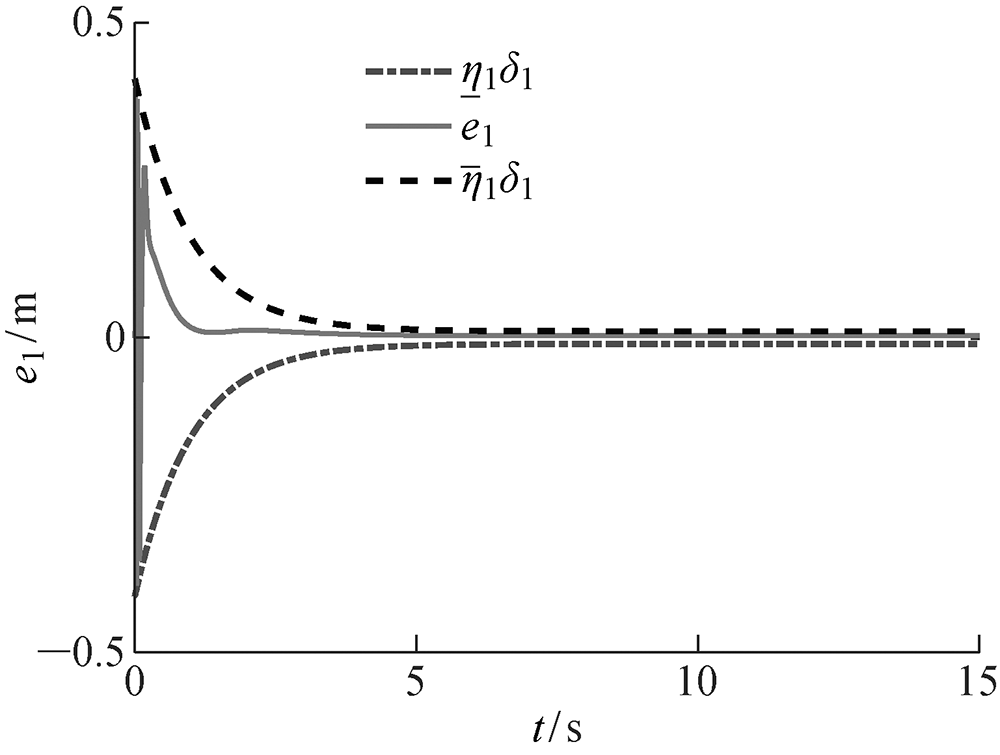
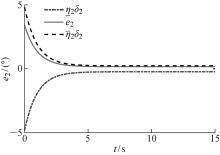
Fig.3
Error of pitching angle tracking
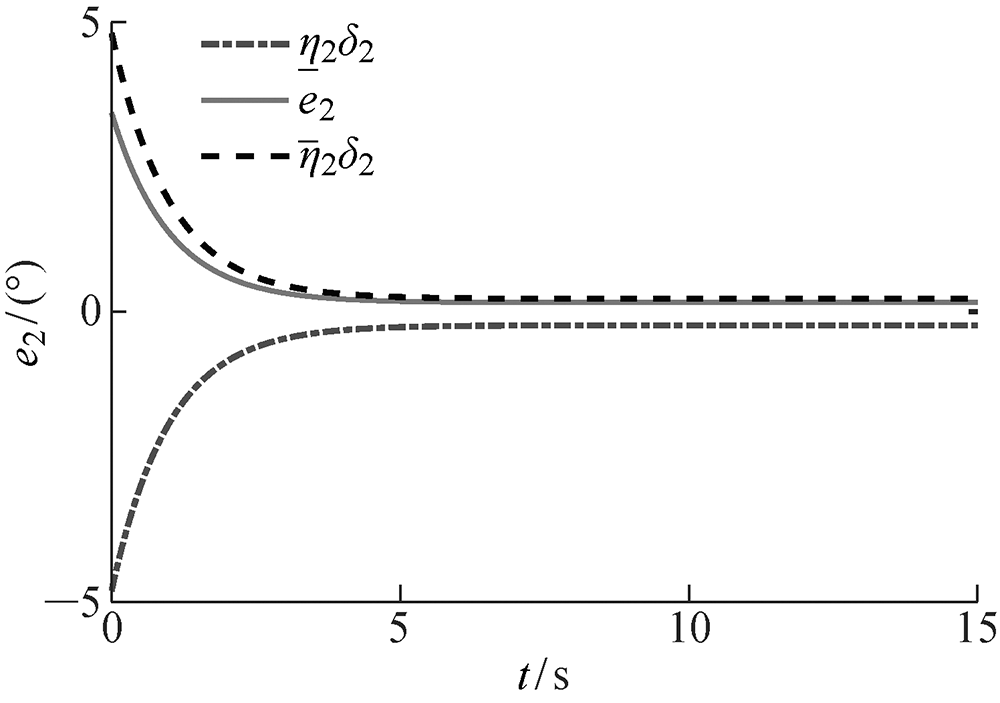
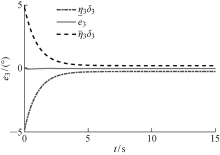
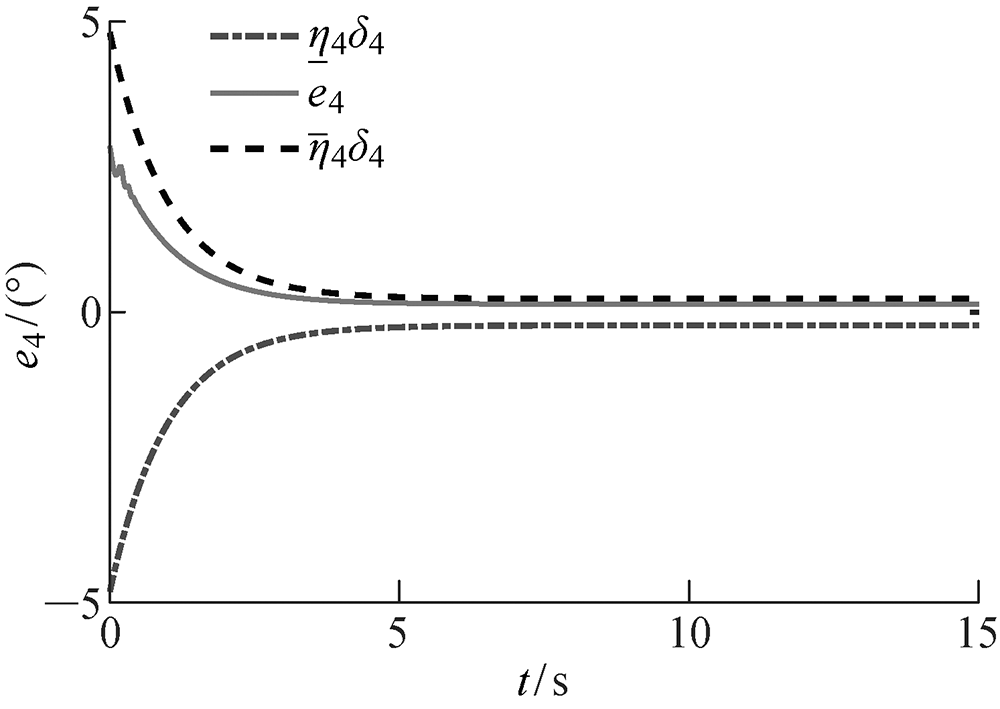
Fig.4
Error of roll angle tracking
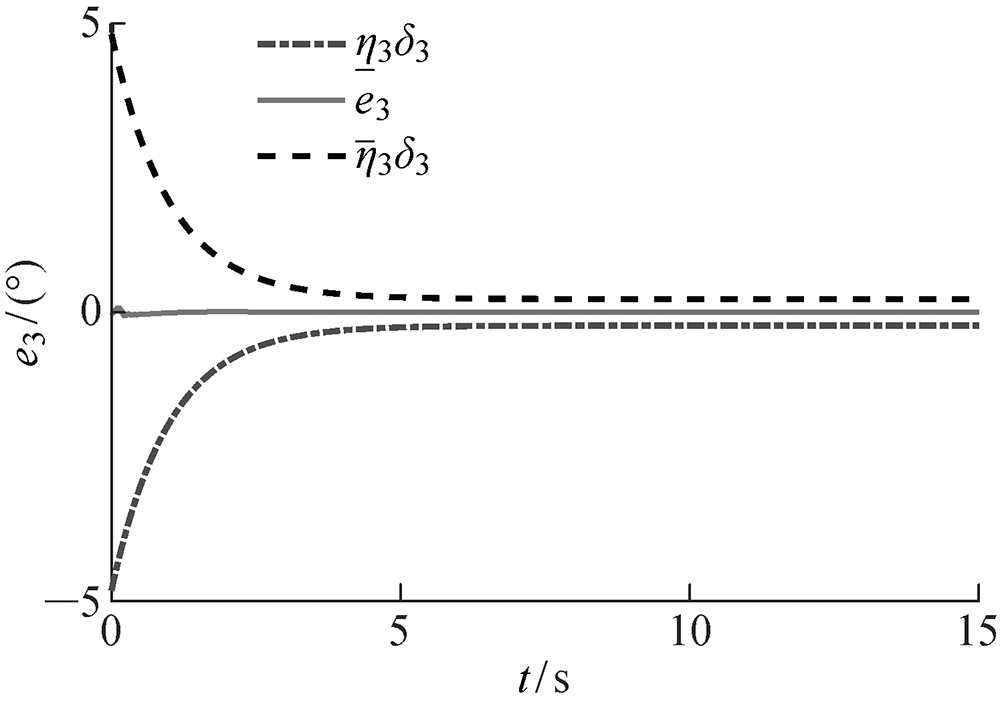
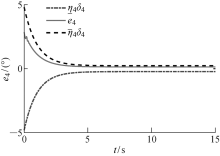
Fig.5
Error of yaw angle tracking
| [1] | 莫子洪. 森林防火工作的现状及对策分析[J]. 南方农业, 2018,12(20):90. |
| MO Zihong. Current situation and countermeasure analysis of forest fire prevention[J]. South China Agriculture, 2018,12(20):90. | |
| [2] | 王秋华, 舒立福, 何诚, 等. 无人机在森林消防中的应用探讨[J]. 林业机械与木工设备, 2017,45(3):4-8. |
| WANG Qiuhua, SHU Lifu, HE Cheng, et al. Study on the application of UAVs in forest fire prevention[J]. Forestry Machinery & Woodworking Equipment, 2017,45(3):4-8. | |
| [3] | 孙秀云, 方勇纯, 孙宁. 小型无人直升机的姿态与高度自适应反步控制[J]. 控制理论与应用, 2012,29(3):381-388. |
| SUN Xiuyun, FANG Yongchun, SUN Ning. Backstepping-based adaptive attitude and height control of a small-scale unmanned helicopter[J]. Control Theory & Application, 2012,29(3):381-388. | |
| [4] | XIAN B, GUO J, ZHANG Y. Adaptive backstepping tracking control of a 6-DOF unmanned helicopter[J]. IEEE/CAA Journal of Automatica Sinica, 2015,2(1):19-24. |
| [5] | 王云霞, 代冀阳, 王村松, 等. 一种线性自抗扰控制器的无人直升机姿态控制方法研究[J]. 计算机应用研究, 2019,36(6):1753-1757. |
| WANG Yunxia, DAI Jiyang, WANG Cunsong, et al. Research on attitude control method of unmanned helicopter based on linear active disturbance rejection control[J]. Application Research of Computers, 2019,36(6):1753-1757. | |
| [6] | YAN K, CHEN M, WU Q X, et al. Extended state observer-based sliding mode fault-tolerant control for unmanned autonomous helicopter with wind gusts[J]. IET Control Theory & Applications, 2019,13(10):1500-1513. |
| [7] | MEI R, CUI Q L. Backstepping control for a 3DOF model helicopter with input and output constraint[J]. International Journal of Advanced Robotic Systems, 2017,14(1):1-17. |
| [8] | LIU Y J, TONG S C. Barrier Lyapunov functions-based adaptive control for a class of nonlinear pure-feedback systems with full state constraints[J]. Automatica, 2016,64:70-75. |
| [9] | BECHLIOULIS C P, ROVITHAKIS G A. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance[J]. IEEE Transactions on Automatic Control, 2008,53(9):2090-2099. |
| [10] | YANG H L, JIANG B, YANG H, et al. Synchronization of multiple 3-DOF helicopters under actuator faults and saturations with prescribed performance[J]. ISA Transactions, 2018,75:118-126. |
| [11] | YAN K, CHEN M, WU Q X. Neural network-based adaptive fault tolerant tracking control for unmanned autonomous helicopters with prescribed performance[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2019,233(12):4350-4362. |
| [12] | YAN K, CHEN M, WU Q X, et al. Extended state observer-based sliding mode fault-tolerant control for unmanned autonomous helicopter with wind gusts[J]. IET Control Theory & Applications, 2019,13(10):1500-1513. |
| [13] | 李荣. 无人直升机的非线性鲁棒自适应抗扰控制[D]. 南京: 南京航空航天大学, 2018. |
| LI Rong. Nonlinear robust adaptive anti-disturbance control for unmanned helicopter system[D]. Nanjing: Nanjing University of Aeronautics and Artronautics, 2018. |
| [1] | YUAN Dongdong (袁冬冬), WANG Yankai∗ (王彦恺). Data Driven Model-Free Adaptive Control Method for Quadrotor Trajectory Tracking Based on Improved Sliding Mode Algorithm [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(6): 790-798. |
| [2] | LYU Shuo, ZHANG Qingzhen, GUO Yunhe, FENG Shuo. Attitude Control of Missile with Deflectable Nose Based on Backstepping Sliding Mode Control [J]. Air & Space Defense, 2022, 5(4): 30-37. |
| [3] | WANG Jiaqi, GUO Jianguo, GUO Zongyi, ZHAO Bin. Sliding Mode Control of High Mach Number Aircraft Based on Disturbance Observer [J]. Air & Space Defense, 2021, 4(3): 85-91. |
| [4] | ZHANG Xianku, HAN Xu. Modeling and Sliding Mode Control for Chaotic Yawing Phenomenon of Large Oil Tanker [J]. Journal of Shanghai Jiao Tong University, 2021, 55(1): 40-47. |
| [5] | LIU Qiu, ZHAO Dongya. Discrete-Time Integral Sliding Mode Predictive Control for Single Input Single Output Systems [J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 898-903. |
| [6] | CHANG Lu, SHAN Liang, LI Jun, DAI Yuewei . Sliding Mode Control of T-Shaped Pedestrian Channel [J]. Journal of Shanghai Jiao Tong University(Science), 2020, 25(4): 478-485. |
| [7] | ZHANG Xiaoyu, ZHANG Peng, ZHENG Xin, NI Yuanhua. Terminal Angle Constraint Sliding Mode Guidance Law Design Based on Fixed-time Convergence [J]. Air & Space Defense, 2020, 3(3): 9-15. |
| [8] | ZHAO Bin, HUANG Xiaoyang, ZHOU Jun, GUO Yue. Multi-missile Distributed LOS Cooperative Guidance Law Design Based on Sliding Mode Control [J]. Air & Space Defense, 2020, 3(3): 16-23. |
| [9] | LIU Yue, ZHANG Jialiang, ZHAO Lijuan, ZHEN Ziyang. Research on Multi-missile Cooperative Guidance Law Based on Second-order Sliding Mode Control [J]. Air & Space Defense, 2020, 3(3): 83-88. |
| [10] | MEI Hantong, MA Lijuan, WU Guanghui, SHAO Xiang, XU Pengya. Adaptive Backstepping Attitude Control System Design of Long-range Missile [J]. Air & Space Defense, 2020, 3(3): 118-123. |
| [11] | YAO Laipeng, HOU Baolin, LIU Xi. Adaptive Terminal Sliding Mode Control of a Howitzer Shell Transfer Arm with Friction Compensation [J]. Journal of Shanghai Jiaotong University, 2020, 54(2): 144-151. |
| [12] | YUE Caicheng1,QIAN Linfang1,XU Yadong1,LI Ying2. Adaptive Fuzzy Sliding Mode Control for a Chain Driving Shell Magazine Based on an Exponential Reaching Law [J]. Journal of Shanghai Jiaotong University, 2018, 52(6): 750-756. |
| [13] | YUE Caichenga (岳才成), CHEN Hongbina (陈红彬), QIAN Linfanga (钱林方), KONG Jianshoub (孔建寿). Adaptive Sliding-Mode Tracking Control for an Uncertain Nonlinear SISO Servo System with a Disturbance Observer [J]. Journal of Shanghai Jiao Tong University (Science), 2018, 23(3): 376-. |
| [14] | Zang Yuejin, Li Renjun, An Guochen. Research on Variable Structure Terminal Guidance Law for Exoatmospheric Anti-TBM Interceptor [J]. Air & Space Defense, 2018, 1(2): 22-26. |
| [15] | HAN Ding,WANG Xiaoliang,CHEN Li,DUAN Dengping. Command Filtered Adaptive Backstepping Control for Airships [J]. Journal of Shanghai Jiaotong University, 2017, 51(8): 909-914. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 207
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 1000
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||