Journal of Shanghai Jiaotong University ›› 2020, Vol. 54 ›› Issue (9): 898-903.doi: 10.16183/j.cnki.jsjtu.2020.169
Previous Articles Next Articles
LIU Qiu, ZHAO Dongya( )
)
Received:2019-12-11
Online:2020-09-28
Published:2020-10-10
Contact:
ZHAO Dongya
E-mail:dyzhao@upc.edu.cn
CLC Number:
LIU Qiu, ZHAO Dongya. Discrete-Time Integral Sliding Mode Predictive Control for Single Input Single Output Systems[J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 898-903.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2020.169
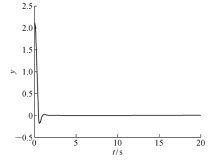
Fig.1
Output of predictive control without disturbance

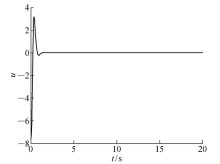
Fig.2
Input of predictive control without disturbance
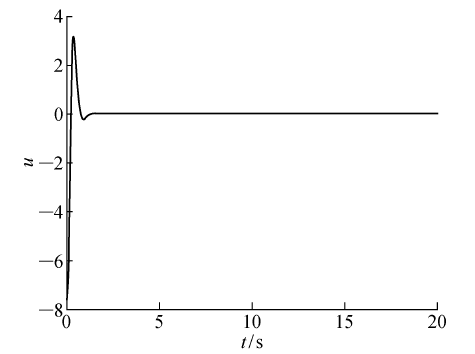
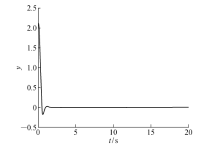
Fig.3
Output of predictive control with disturbance

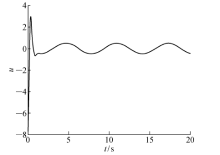
Fig.4
Input of predictive control with disturbance
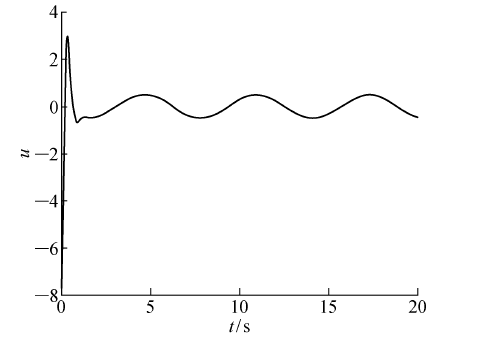
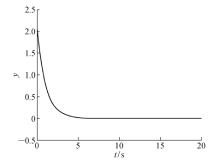
Fig.5
Output of sliding mode predictive control without disturbance

Fig.6
Input of sliding mode predictive control without disturbance

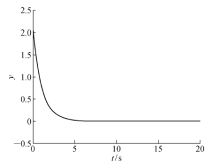
Fig.7
Output of sliding mode predictive control with disturbance
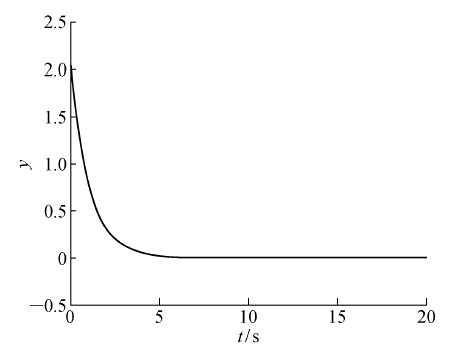

Fig.8
Input of sliding mode predictive control with disturbance

| [1] | UTKIN V. Variable structure systems with sliding modes[J]. IEEE Transactions on Automatic Control, 1977,22(2):212-222. |
| [2] | 刘金琨. 滑模变结构控制MATLAB仿真[M]. 北京: 清华大学出版社, 2005. |
| LIU Jinkun. MATLAB simulation for sliding mode control[M]. Beijing: Tsinghua University Press, 2005. | |
| [3] | SLOTINE J J E, LI W. Applied nonlinear control[M]. Englewood Cliffs, NJ, USA: Prentice Hall, 1991. |
| [4] | HUNG C P. Integral variable structure control of nonlinear system using a CMAC neural network learning approach[J]. IEEE Transactions on Systems, Man, and Cybernetics—Part B: Cybernetics, 2004,34(1):702-709. |
| [5] | WANG J D, LEE T L, JUANG Y T. New methods to design an integral variable structure controller[J]. IEEE Transactions on Automatic Control, 1996,41(1):140-143. |
| [6] | CASTANOS F, FRIDMAN L. Analysis and design of integral sliding manifolds for systems with unmatchedperturbations[J]. IEEE Transactions on Automatic Control, 2006,51(5):853-858. |
| [7] | CAO W J, XU J X. Nonlinear integral-type sliding surface for both matched and unmatched uncertain systems[J]. IEEE Transactions on Automatic Control, 2004,49(8):1355-1360. |
| [8] | XI Z, HESKETH T. Discrete time integral sliding mode control for systems with matched and unmatched uncertainties[J]. IET Control Theory & Applications, 2010,4(5):889-896. |
| [9] | 陈虹. 模型预测控制[M]. 北京: 科学出版社, 2013. |
| CHEN Hong. Model predictive control[M]. Beijing: Science Press, 2013. | |
| [10] | STEINBERGER M, CASTILLO I, HORN M, et al. Model predictive output integral sliding mode control [C]//International Workshop on Variable Structure Systems (VSS). Nanjing, China: IEEE, 2016: 228-233. |
| [11] | ROBERTS P D. A brief overview of model predictive control[J]. Computing & Control Engineering Jouranl, 1999,10(5):186-188. |
| [12] | 宋立忠, 陈少昌, 姚琼荟. 多输入离散时间系统滑模预测控制[J]. 电机与控制学报, 2005,9(2):128-132. |
| SONG Lizhong, CHEN Shaochang, YAO Qionghui. Sliding mode predictive control for multi-input discrete-time systems[J]. Electric Machines and Control, 2005,9(2):128-132. | |
| [13] | 周建锁, 刘志远, 裴润. 约束非线性系统的滑模预测控制方法[J]. 控制与决策, 2001,16(2):207-210. |
| ZHOU Jiansuo, LIU Zhiyuan, PEI Run. Sliding mode predictive control scheme for constrained nonlinear systems[J]. Control and Decision, 2001,16(2):207-210. |
| [1] | JIANG Junhao, CHEN Gang. Dynamic Model Predictive Control Method for Steering Control of Driving Robot [J]. Journal of Shanghai Jiao Tong University, 2022, 56(5): 594-603. |
| [2] | SHEN Yangwu, SONG Xingrong, LUO Ziren, SHEN Feifan, HUANG Sheng. Inertial Control Strategy for Wind Farm with Distributed Energy Storage System Based on Model Predictive Control [J]. Journal of Shanghai Jiao Tong University, 2022, 56(10): 1285-1293. |
| [3] | ZHANG Chenzhi (张晨之), ZHUANG Cheng (庄 诚), ZHENG Xueke (郑学科), CAI Runze (蔡润泽), LI Mian (李 冕). Stochastic Model Predictive Control Approach to Autonomous Vehicle Lane Keeping [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(5): 626-633. |
| [4] | LI Biao, WANG Liwen, XING Zhiwei, WANG Sibo, LUO Qian. Cooperative Control of Aircraft Ground Deicing Resources [J]. Journal of Shanghai Jiao Tong University, 2021, 55(11): 1362-1370. |
| [5] | HE Defeng, PENG Binbin, GU Yujia, YU Shiming. Learning Predictive Control of Vehicular Automated Cruise Systems Based on Gaussian Process Regression [J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 904-909. |
| [6] | WANG Zhiwen, LIU Wei. Event-Triggered Generalized Predictive Control of Cyber-Physical Systems Under Denial-of-Service Attacks [J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 910-915. |
| [7] | ZHANG Jianjun, WU Zhonghua, LIU Qunpo, WANG Hongqi, LIU Weidong. Bilateral Adaptive Impedance Control Scheme in Master-Slave Manipulator Teleoperation System [J]. Journal of Shanghai Jiaotong University, 2020, 54(6): 615-623. |
| [8] | ZHANG Xue, CUI Hao, LUO Qianyue, ZHANG Hui . Nonlinear Distributed Model Predictive Control for Multiple Missiles Against Maneuvering Target with a Trajectory Predictor [J]. J Shanghai Jiaotong Univ Sci, 2020, 25(6): 779-789. |
| [9] | GONG Zhenghua, SONG Chenwei, LI Gangqiang, CHEN Jianping, XU Zijing, YUAN Jingqi . Model Predictive Control for Steering System of Water-Jet Propulsion [J]. Journal of Shanghai Jiao Tong University (Science), 2020, 25(3): 299-303. |
| [10] | LI Donghui,GAO Feng. Improved Smith Predictive Decoupling Control Based on Disturbance Observer for Compression Refrigeration System [J]. Journal of Shanghai Jiaotong University, 2019, 53(5): 593-599. |
| [11] | SONG Xueqian* (宋雪倩), HU Shiqiang (胡士强). Hierarchy-Based Adaptive Generalized Predictive Control for Aerial Grasping of a Quadrotor Manipulator [J]. Journal of Shanghai Jiao Tong University (Science), 2019, 24(4): 451-458. |
| [12] | WANG Lin (王林), LU Zhiqiang *(陆志强). Proactive Approach for Production and Condition-Based Maintenance Integration Problem in a Deteriorating System [J]. Journal of Shanghai Jiao Tong University (Science), 2019, 24(4): 500-509. |
| [13] | FENG Wenjiang,LI Le,DAI Caili. Pilot Allocation Based on Matched Game for Massive Multiple-Input Multiple-Output Systems [J]. Journal of Shanghai Jiaotong University, 2019, 53(3): 327-333. |
| [14] | LI Rui (李锐), ZHOU Mengjiao (周梦娇), WU Mengjuan (吴孟娟), TANG Xiaoming *(唐晓铭). Semi-Active Predictive Control of Isolated Bridge Based on Magnetorheological Elastomer Bearing [J]. Journal of Shanghai Jiao Tong University (Science), 2019, 24(1): 64-70. |
| [15] | WANG Guoliang *(王国良), DING Baocang (丁宝苍), YAN Weiwu (阎威武). Steam Pressure Control of 1 000MW Ultra-Supercritical Coal-Fired Power Unit Based on Multi-Model Predictive Control [J]. Journal of Shanghai Jiao Tong University (Science), 2019, 24(1): 86-93. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||