Journal of Shanghai Jiaotong University ›› 2020, Vol. 54 ›› Issue (9): 890-897.doi: 10.16183/j.cnki.jsjtu.2019.122
Previous Articles Next Articles
HE Hongweia, ZOU Zaojiana,b( ), ZENG Zhihuaa
), ZENG Zhihuaa
Received:2019-04-26
Online:2020-09-28
Published:2020-10-10
Contact:
ZOU Zaojian
E-mail:zjzou@sjtu.edu.cn
CLC Number:
HE Hongwei, ZOU Zaojian, ZENG Zhihua. Adaptive NN-SM Control for Path Following of Underactuated Surface Vessels[J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 890-897.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2019.122
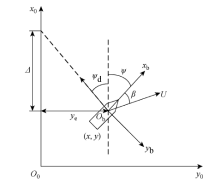
Fig.1
Schematic of LOS guidance
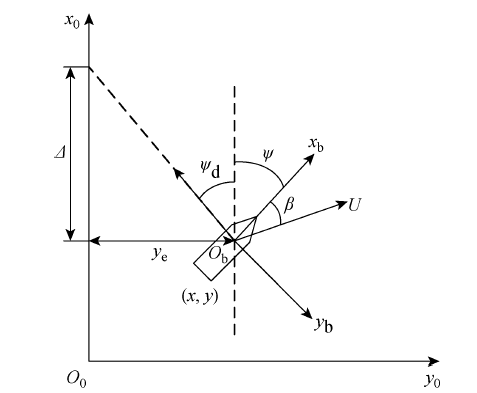
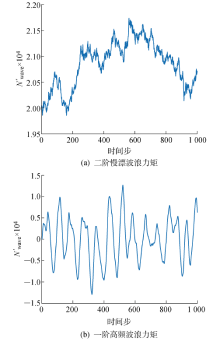
Fig.2
Nondimensional second-order and first-order wave moments
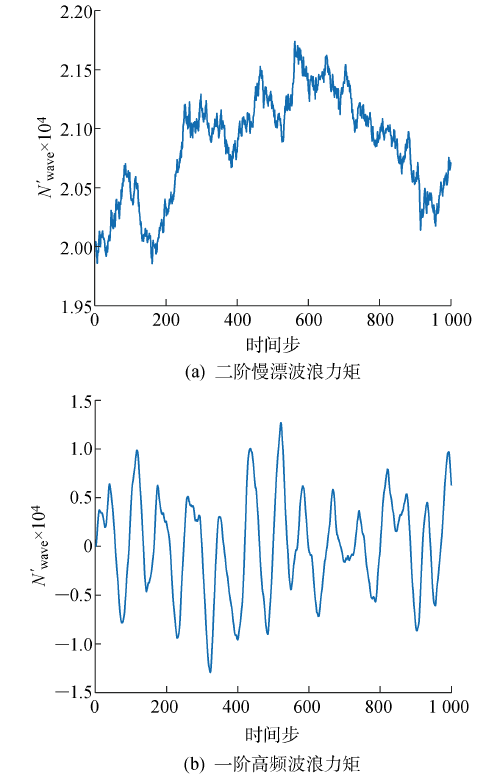

Fig.3
Simulation results of heading control
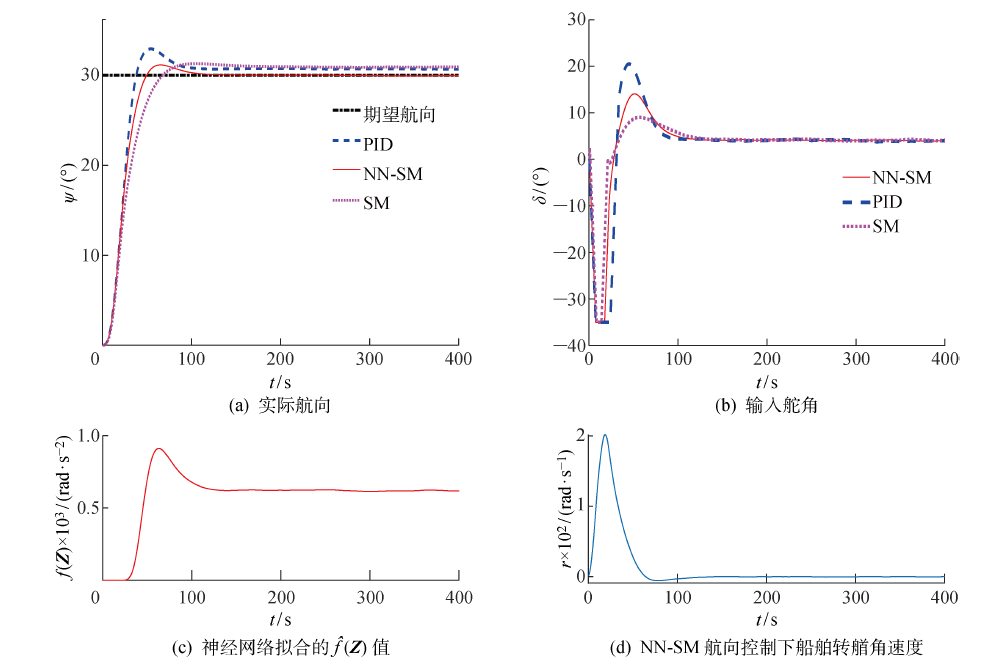
Fig.4
Simulation results of path following under the second-order wave forces
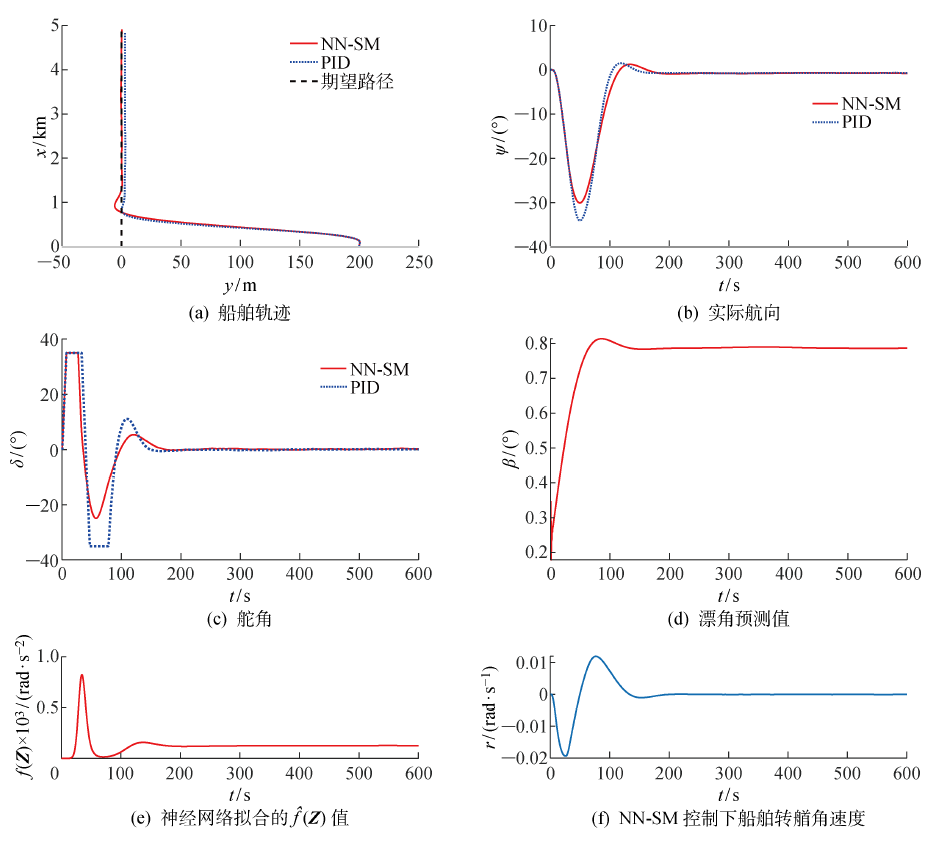
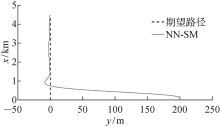
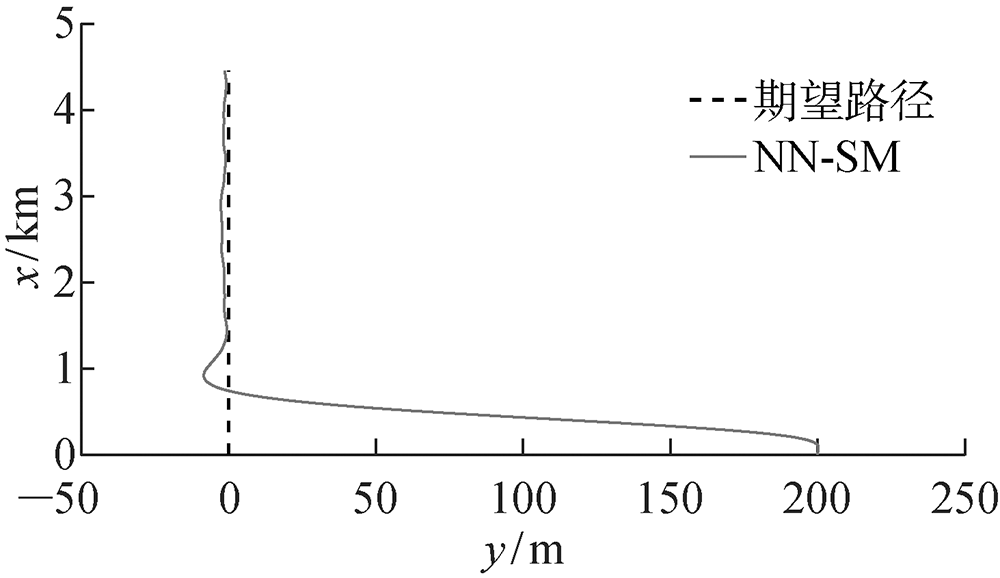
Fig.5
Simulation results of path following under the first-order wave forces
| [1] | HEALEY A J, LIENARD D. Multivariable sliding mode control for autonomous diving and steering of unmanned underwater vehicles[J]. IEEE Journal of Oceanic Engineering, 1993,18(3):327-339. |
| [2] | FREDRIKSEN E, PETTERSEN K Y. Global κ-exponential way-point maneuvering of ships: Theory and experiments[J]. Automatica, 2006,42(4):677-687. |
| [3] | FOSSEN T I, BREIVIK M, SKJETNE R. Line-of-sight path following of underactuated marine craft[J]. IFAC Proceedings Volumes, 2003,36(21):211-216. |
| [4] | LEKKAS A M, FOSSEN T I. Trajectory tracking and ocean current estimation for marine underactuated vehicles [C]//2014 IEEE Conference on Control Applications (CCA). Juan Les Antibes, France: IEEE, 2014: 905-910. |
| [5] | BORHAUG E, PAVLOV A, PETTERSEN K Y. Integral LOS control for path following of underactuated marine surface vessels in the presence of constant ocean currents [C]//IEEE Conference on Decision and Control. Cancun, Mexico: IEEE, 2008: 4984-4991. |
| [6] | KAHVECI N E, IOANNOU P A. Adaptive steering control for uncertain ship dynamics and stability ana-lysis[J]. Automatica, 2013,49(3):685-697. |
| [7] | FOSSEN T I, LEKKAS A M. Direct and indirect adaptive integral line-of-sight path-following controllers for marine craft exposed to ocean currents[J]. International Journal of Adaptive Control & Signal Processing, 2017,31(4):445-463. |
| [8] | LIU C, CHEN C P, ZOU Z, et al. Adaptive NN-DSC control design for path following of underactuated surface vessels with input saturation[J]. Neurocomputing, 2017,267:466-474. |
| [9] | 刘洋, 郭晨. 船舶航向保持RBF神经网络自适应非线性控制[J]. 大连海事大学学报, 2013,39(4):1-4. |
| LIU Yang, GUO Chen. RBF neural network based adaptive nonlinear control for ship course keeping[J]. Journal of Dalian Maritime University, 2013,39(4):1-4. | |
| [10] | 罗伟林, 邹早建, 李铁山. 基于神经网络和L2增益的船舶航向自动舵设计[J]. 中国造船, 2009,50(2):40-45. |
| LUO Weilin, ZOU Zaojian, LI Teishan. Neural-network and L2-gain based autopilot design of ship course-keeping[J]. Shipbuilding of China, 2009,50(2):40-45. | |
| [11] | 秦梓荷, 林壮, 李平, 等. 基于LOS导航的欠驱动船舶滑模控制[J]. 中南大学学报(自然科学版), 2016,47(10):3605-3611. |
| QIN Zihe, LIN Zhuang, LI Ping, et al. Sliding-mode control of underactuated ship based on LOS guidance[J]. Journal of Central South University (Science and Technology), 2016,47(10):3605-3611. | |
| [12] | FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. New York: John Wiley & Sons, 2011: 1-596. |
| [13] | 李铁山, 邹早建, 罗伟林. 基于DSC后推法的非线性系统的鲁棒自适应NN控制[J]. 自动化学报, 2008,34(11):1424-1430. |
| LI Tieshan, ZOU Zaojian, LUO Weilin. DSC-backstepping based robust adaptive NN control for nonlinear systems[J]. Acta Automatica Sinica, 2008,34(11):1424-1430. | |
| [14] | 刘程. 船舶路径跟踪与减横摇综合控制研究[D]. 上海: 上海交通大学, 2015. |
| LIU Cheng. Integrated control of path following and roll motion reduction for marine vessels[D]. Shanghai: Shanghai Jiao Tong University, 2015. | |
| [15] | FOSSEN T I. Guidance and control of ocean vehicles[M]. New York: John Wiley & Sons, 1994: 1-494. |
| [1] | LU Zhan, WANG Jian, MA Qingyan, XU Changjian, LIANG Xiaofeng. Thrust Allocation Method for Dual Waterjet Propelled Unmanned Surface Vehicles Based on Hierarchical Optimization [J]. Journal of Shanghai Jiao Tong University, 2026, 60(3): 427-439. |
| [2] | YONG Jiuqin1, 2, XUE Zhentao1, 2, CHEN Li1, 2. Influence of Sea Condition on Tracking Accuracy and Control Energy Consumption of Unmanned Surface Vessels under Straight Line Navigation [J]. Ocean Engineering Equipment and Technology, 2024, 11(4): 103-109. |
| [3] | HE Yu, OUYANG Zilu, ZOU Lu, CHEN Weimin, ZOU Zaojian. Ship Path Following and Collision Avoidance Based on Vector Field Guidance Law and Model Predictive Control [J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1644-1653. |
| [4] | SHI Qiang (师 强), ZHANG Jianlin (张建林), YANG Ming∗ (杨 明). Curvature Adaptive Control Based Path Following for Automatic Driving Vehicles in Private Area [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(5): 690-698. |
| [5] | YAO Tiancheng, ZHAO Yongsheng, WANG Hongyu, HE Yanping, DING Zilong, CHI Zheying, CAI Weikai. Development of a Hybrid Solar and Wind-Powered Long-Range Unmanned Ocean Stereo Exploration Vessel [J]. Journal of Shanghai Jiao Tong University, 2021, 55(2): 215-220. |
| [6] | CAO Yang, HE Dengbo, YU Fan, LUO Zhe. Generalized Predictive Control Based on Vehicle Path Following Strategy by Using Active Steering System [J]. Journal of Shanghai Jiao Tong University, 2016, 50(03): 401-406. |
| [7] | LIU Si-yan (刘思妍), LI De-wei* (李德伟), XI Yu-geng (席裕庚), TANG Qi-feng (汤奇峰). A Short-Term Traffic Flow Forecasting Method and Its Applications [J]. Journal of shanghai Jiaotong University (Science), 2015, 20(2): 156-163. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||