Journal of Shanghai Jiaotong University ›› 2020, Vol. 54 ›› Issue (9): 904-909.doi: 10.16183/j.cnki.jsjtu.2020.173
Previous Articles Next Articles
HE Defeng( ), PENG Binbin, GU Yujia, YU Shiming
), PENG Binbin, GU Yujia, YU Shiming
Received:2019-12-17
Online:2020-09-28
Published:2020-10-10
CLC Number:
HE Defeng, PENG Binbin, GU Yujia, YU Shiming. Learning Predictive Control of Vehicular Automated Cruise Systems Based on Gaussian Process Regression[J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 904-909.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2020.173
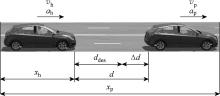
Fig.1
Tracking scenario of vehicles considered
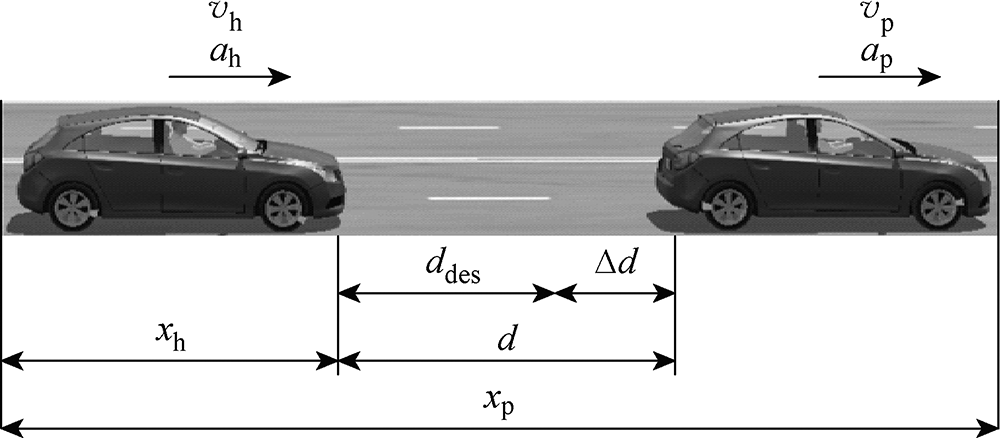

Fig.2
Acceleration of host vehicle

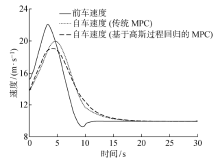
Fig.3
Speed of host vehicle
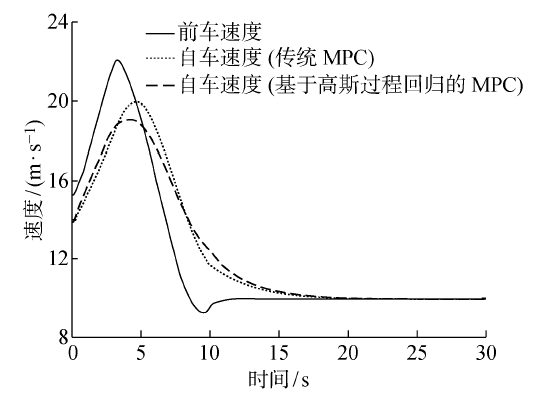
Fig.4
Time evolution of inter-vehicle distances
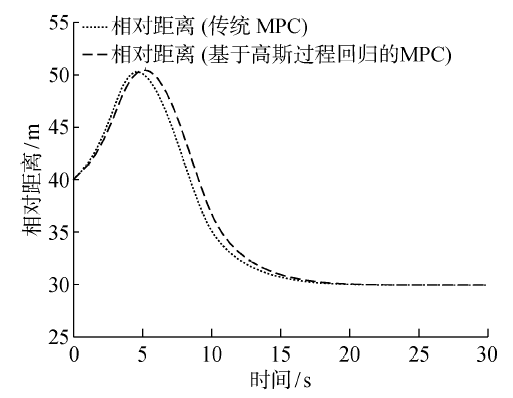
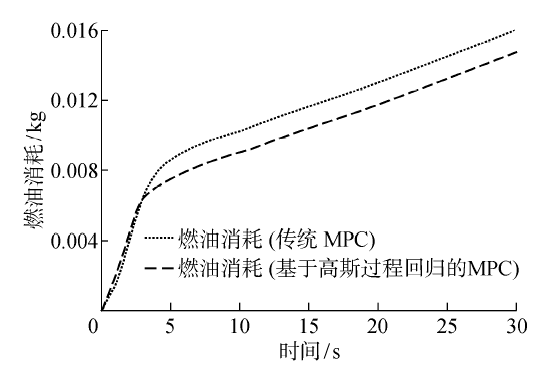
Fig.5
Time evolution of fuel consumption of host vehicle
| [1] | 张亮修, 吴光强, 郭晓晓. 车辆多目标自适应巡航控制算法[J]. 西安交通大学学报, 2016,50(11):136-143. |
| ZHANG Liangxiu, WU Guangqiang, GUO Xiaoxiao. Vehicular multi-objective adaptive cruise control algorithm[J]. Journal of Xi’an Jiaotong University, 2016,50(11):136-143. | |
| [2] | 吴光强, 张亮修, 刘兆勇, 等. 汽车自适应巡航控制系统研究现状与发展趋势[J]. 同济大学学报(自然科学版), 2017,45(4):544-553. |
| WU Guangqiang, ZHANG Liangxiu, LIU Zhaoyong, et al. Research status and development trend of vehicle adaptive cruise control systems[J]. Journal of Tongji University (Natural Science), 2017,45(4):544-553. | |
| [3] | ZHANG J, IOANNOU P A. Longitudinal control of heavy trucks in mixed traffic: Environmental and fuel economy considerations[J]. IEEE Transactions on Intelligent Transportation Systems, 2006,7(1):92-104. |
| [4] | HE D F, WANG L, SUN J. On stability of multiobjective NMPC with objective prioritization[J]. Automatica, 2015,57:189-198. |
| [5] | HE D F, HUANG H, CHEN Q X. Quasi-min-max MPC for constrained nonlinear systems with guaranteed input-to-state stability[J]. Journal of the Franklin Institute, 2014,351(6):3405-3423. |
| [6] | KAMAL M A S, MUKAI M, MURATA J, et al. Model predictive control of vehicles on urban roads for improved fuel economy[J]. IEEE Transactions on Control Systems Technology, 2013,21(3):831-841. |
| [7] | 李升波, 王建强, 李克强, 等. MPC实用化问题处理及在车辆ACC中的应用[J]. 清华大学学报(自然科学版), 2010,50(5):645-648. |
| LI Shengbo, WANG Jianqiang, LI Keqiang, et al. Processing of MPC practical problems and its application to vehicular adaptive cruise control systems[J]. Journal of Tsinghua University (Science and Technology), 2010,50(5):645-648. | |
| [8] | EBEN LI S, LI K Q, WANG J Q. Economy-oriented vehicle adaptive cruise control with coordinating multiple objectives function[J]. Vehicle System Dynamics, 2013,51(1):1-17. |
| [9] | LI S E, JIA Z Z, LI K Q, et al. Fast online computation of a model predictive controller and its application to fuel economy-oriented adaptive cruise control[J]. IEEE Transactions on Intelligent Transportation Systems, 2015,16(3):1199-1209. |
| [10] | 朱敏, 陈慧岩. 考虑车间反应时距的汽车自适应巡航控制策略[J]. 机械工程学报, 2017,53(24):144-150. |
| ZHU Min, CHEN Huiyan. Strategy for vehicle adaptive cruise control considering the reaction headway[J]. Journal of Mechanical Engineering, 2017,53(24):144-150. | |
| [11] | ZHAO R C, WONG P K, XIE Z C, et al. Real-time weighted multi-objective model predictive controller for adaptive cruise control systems[J]. International Journal of Automotive Technology, 2017,18(2):279-292. |
| [12] | MESBAH A. Stochastic model predictive control: An overview and perspectives for future research[J]. IEEE Control Systems, 2016,36(6):30-44. |
| [13] | LEFèVRE S, SUN C, BAJCSY R, et al. Comparison of parametric and non-parametric approaches for vehicle speed prediction [C]//American Control Conference. Portland, OR, USA: IEEE, 2014: 3494-3499. |
| [14] | RASMUSSEN C E, WILLIAMS C K I. Gaussian processes for machine learning[M]. Cambridge, MA, USA: The MIT Press, 2006. |
| [15] | 何志昆, 刘光斌, 赵曦晶, 等. 高斯过程回归方法综述[J]. 控制与决策, 2013,28(8):1121-1129. |
| HE Zhikun, LIU Guangbin, ZHAO Xijing, et al. Overview of Gaussian process regression[J]. Control and Decision, 2013,28(8):1121-1129. | |
| [16] | 肖红军, 刘乙奇, 黄道平. 高斯过程建模方法在工业过程中的应用[J]. 华南理工大学学报(自然科学版), 2016,44(12):36-43. |
| XIAO Hongjun, LIU Yiqi, HUANG Daoping. Application of Gaussian process modeling method in industrial processes[J]. Journal of South China University of Technology (Natural Science Edition), 2016,44(12):36-43. | |
| [17] | 陈虹. 模型预测控制[M]. 北京: 科学出版社, 2013. |
| CHEN Hong. Model predictive control[M]. Beijing: Science Press, 2013. | |
| [18] | 孙涛, 夏维, 李道飞. 基于模型预测控制的协同式自适应巡航控制系统[J]. 中国机械工程, 2017,28(4):486-491. |
| SUN Tao, XIA Wei, LI Daofei. CACC system based on MPC[J]. China Mechanical Engineering, 2017,28(4):486-491. |
| [1] | JIANG Junhao, CHEN Gang. Dynamic Model Predictive Control Method for Steering Control of Driving Robot [J]. Journal of Shanghai Jiao Tong University, 2022, 56(5): 594-603. |
| [2] | WANG Ziyao, GUO Fengxiang, CHEN Li. Engine Emission Prediction Based on Extrapolated Gaussian Process Regression Method [J]. Journal of Shanghai Jiao Tong University, 2022, 56(5): 604-610. |
| [3] | SHEN Yangwu, SONG Xingrong, LUO Ziren, SHEN Feifan, HUANG Sheng. Inertial Control Strategy for Wind Farm with Distributed Energy Storage System Based on Model Predictive Control [J]. Journal of Shanghai Jiao Tong University, 2022, 56(10): 1285-1293. |
| [4] | ZHANG Chenzhi (张晨之), ZHUANG Cheng (庄 诚), ZHENG Xueke (郑学科), CAI Runze (蔡润泽), LI Mian (李 冕). Stochastic Model Predictive Control Approach to Autonomous Vehicle Lane Keeping [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(5): 626-633. |
| [5] | LI Biao, WANG Liwen, XING Zhiwei, WANG Sibo, LUO Qian. Cooperative Control of Aircraft Ground Deicing Resources [J]. Journal of Shanghai Jiao Tong University, 2021, 55(11): 1362-1370. |
| [6] | ZHANG Xue, CUI Hao, LUO Qianyue, ZHANG Hui . Nonlinear Distributed Model Predictive Control for Multiple Missiles Against Maneuvering Target with a Trajectory Predictor [J]. J Shanghai Jiaotong Univ Sci, 2020, 25(6): 779-789. |
| [7] | GONG Zhenghua, SONG Chenwei, LI Gangqiang, CHEN Jianping, XU Zijing, YUAN Jingqi . Model Predictive Control for Steering System of Water-Jet Propulsion [J]. Journal of Shanghai Jiao Tong University (Science), 2020, 25(3): 299-303. |
| [8] | LIU Jian,CHEN Ziqiang,HUANG Deyang,ZHENG Changwen,ZHOU Shiyao,JIANG Yu. Remaining Useful Life Prediction for Lithium-Ion Batteries Based on Time Interval of Equal Charging Voltage Difference [J]. Journal of Shanghai Jiaotong University, 2019, 53(9): 1058-1065. |
| [9] | WANG Guoliang *(王国良), DING Baocang (丁宝苍), YAN Weiwu (阎威武). Steam Pressure Control of 1 000MW Ultra-Supercritical Coal-Fired Power Unit Based on Multi-Model Predictive Control [J]. Journal of Shanghai Jiao Tong University (Science), 2019, 24(1): 86-93. |
| [10] | TANG Xianlun (唐贤伦), LIU Nianci (刘念慈), WAN Yali (万亚利), GUO Fei (郭飞). Multi-Step Model Predictive Control Based on Online Support Vector Regression Optimized by Multi-Agent Particle Swarm Optimization Algorithm [J]. Journal of Shanghai Jiao Tong University (Science), 2018, 23(5): 607-612. |
| [11] | WANG Lin,ZOU Yuanyuan,LI Shaoyuan. Two-Layered Model Predictive Control with Performance-Based Trigger [J]. Journal of Shanghai Jiaotong University, 2018, 52(10): 1324-1332. |
| [12] | ZHANG Qian* (张茜), LIU Zhiyuan (刘志远). Hierarchical Control Strategy of Trajectory Tracking for Intelligent Vehicle [J]. Journal of shanghai Jiaotong University (Science), 2017, 22(2): 224-232. |
| [13] | WANG Xuan,TAO Jianfeng,ZHANG Fengrong,WU Yajin,LIU Chengliang. Unidirectional Proportional PumpControlled Asymmetric Cylinder Control Method Based on Predictive Control [J]. Journal of Shanghai Jiaotong University, 2016, 50(05): 696-701. |
| [14] | . Distributed Model Predictive Control with One-Step Delay Communication for Large-Scale Systems and a Case Study [J]. Journal of shanghai Jiaotong University (Science), 2014, 19(6): 747-754. |
| [15] | LUO Lihua. Steering Control for Lane Keeping System Based on MPC [J]. Journal of Shanghai Jiaotong University, 2014, 48(07): 1015-1020. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||