

在服务型人机交互任务中,目前仿人表情机器人面临的口部运动自由度不足、运动模式单一等问题限制了机器人的口部运动灵活性,使其难以实现逼真的面部表情动作.因此需要开发与人类口部结构相似并能够模拟人类口部运动模式的仿人表情机器人机构,从而提升机器人口部运动的灵活性,改善交互体验.当前的仿人表情机器人口部机构可按照驱动方式不同分为刚性驱动型、柔性驱动型和刚柔耦合驱动型.Wu等[1]基于连杆滑块机构实现了对仿人表情机器人下颌张合自由度和3个唇部自由度的驱动.Faraj等[2]基于线牵引和舵机直驱的方式,以低成本的方式实现了对EVA机器人4个唇部自由度和1个下颌张合自由度的驱动.Ishihara等[3]则通过线牵引和同步带传动方式,实现了对Affetto机器人3个唇部和下颌自由度的驱动.Toan等[4]基于7自由度连杆设计了机器人唇部驱动机构,可实现多模式的复杂唇部形状,一定程度上提升了机器人口部运动的灵活性,但无法与下颌机构联动.Madumal等[5]采用舵机直驱的方法设计了3自由度的口部驱动机构,可分别实现上下唇和下颌的单自由度驱动,并能够实现一定程度的口型模拟.Yang等[6]以平面滑台机构为启发设计了3自由度的机器人下颌驱动机构,可实现下颌张合和平面内滑动,提升了下颌运动的灵活性.Liu等[7]以形状记忆合金(SMA)和离子聚合物金属复合材料(IPMC)作为混合人工肌肉,实现了对仿人表情机器人1个下颌自由度和4个唇部自由度的驱动,提供了一种全柔性口部驱动方案.
由上述研究现状可知,当前仿人表情机器人在提升唇部驱动自由度的同时,对与下颌运动相关的口部驱动方案研究不足,导致机器人难以实现与下颌运动相关的面部动作,存在口部动作僵硬、运动模式单一的问题,从而无法获得更好的人机交互体验.针对这些不足,本文以人类下颌运动机制为启发,基于空间连杆机构,提出了一种新颖的多自由度仿生下颌机构,该机构依靠舵机驱动,可模拟人类下颌的张合、前推、偏移3种基本运动模式,并能够实现以咀嚼和咬唇为代表的口部复杂运动模式,提升了仿人表情机器人的口部动作灵活性.
1 下颌运动与仿人表情
人类的面部表情动作主要由面部肌肉和面部活动器官的耦合运动形成[8],下颌骨作为人类面部唯一的活动骨骼,对于口部表情动作的形成至关重要.下颌运动可视为下颌骨与上颌颞骨之间的相对运动,具体表现为一系列复杂的三维转动和滑动.人类下颌骨的运动通过咀嚼肌驱动下颌头与颞骨下颌窝之间形成的颞下颌关节(TMJ)来实现.人类下颌骨运动参考轴及运动参考平面如图1所示,3种基本运动模式如图2所示.水平轴、矢状轴和冠状轴交汇于下颌骨TMJ,通过咀嚼肌群的驱动,可实现如图2(a)的下颌骨沿TMJ矢状轴的前推运动、如图2(b)的绕TMJ冠状轴的偏移运动,以及如图2(c)的绕TMJ水平轴的张合运动,此为人类下颌骨的3种基本运动模式,其中前推运动和偏移运动在水平面内实现,具有3个自由度,而张合运动在矢状面内实现,具有1个自由度,3种基本运动模式可以彼此复合实现如咀嚼等更复杂的下颌运动模式[9-10].
图1

图1
人类下颌骨运动参考轴及运动参考平面
Fig.1
Reference axes and motion reference planes of human jaw movement
图2

仿生下颌的运动与仿人表情间的联系可以用面部动作编码系统(Facial Action Coding System, FACS)来描述.FACS是由美国心理学家 Ekman 等[11]于 1971年提出的面部表情描述方法,描述了面部肌肉、活动器官动作与面部表情之间的映射关系.FACS 根据人类面部肌肉与开心、愤怒、伤心、恐惧、厌恶和惊讶6种基本表情之间的对应关系,将人脸划分为 46 个相互独立而又相互联系的运动单元(Action Unit, AU).对比无表情的中性人脸特征,基本表情的人脸特征有独特的肌肉运动规律[12],并且可以采用 FACS 来量化表示.下颌的3种运动模式对应了3种不同运动单元的动作,表1体现了下颌运动与运动单元的映射关系.
表1 下颌运动与运动单元映射关系表
Tab.1
| 运动单元 | 下颌运动 | 对应肌肉 |
|---|---|---|
| AU26 | 下颌下降 | 咬肌、颞肌、翼状肌 |
| AU29 | 下颌外推 | 翼状肌 |
| AU30 | 下颌侧移 | 翼状肌、咬肌、颞肌 |
人类的表情形成是由多条肌肉共同参与协调运动的结果[13],FACS理论表明下颌通过3种基本动作参与到面部表情的形成过程,其中最主要的下颌张合运动在6种基本表情中直接参与到了恐惧、惊讶、愤怒表情的形成中.同时人类的基本表情引申出许多程度较弱的变种情绪[14],为了扩大仿生下颌应用的表情范围,本研究同样将此类表情纳入研究.人们通常通过抿嘴来传递模棱两可信息[15],或通过下颌前伸来表达更高程度的愤怒[16],上述两种表情需要下颌前推来实现;人们显露蔑视或轻视表情时,往往会将嘴巴向一侧抬起,需要下颌偏移来实现[17].在个体高度紧张的情况下可能会出现咬嘴唇的动作[18],通过下颌基本动作的耦合可以对此实现模拟.因此仿人表情机器人下颌的张合、前推、偏移3种基本运动模式对于逼真表情形成具有重要作用,本文以FACS中AU26、AU29、AU30,3个运动单元及其对应的运动模式为启发进行多自由度仿生下颌的设计.
2 机械设计
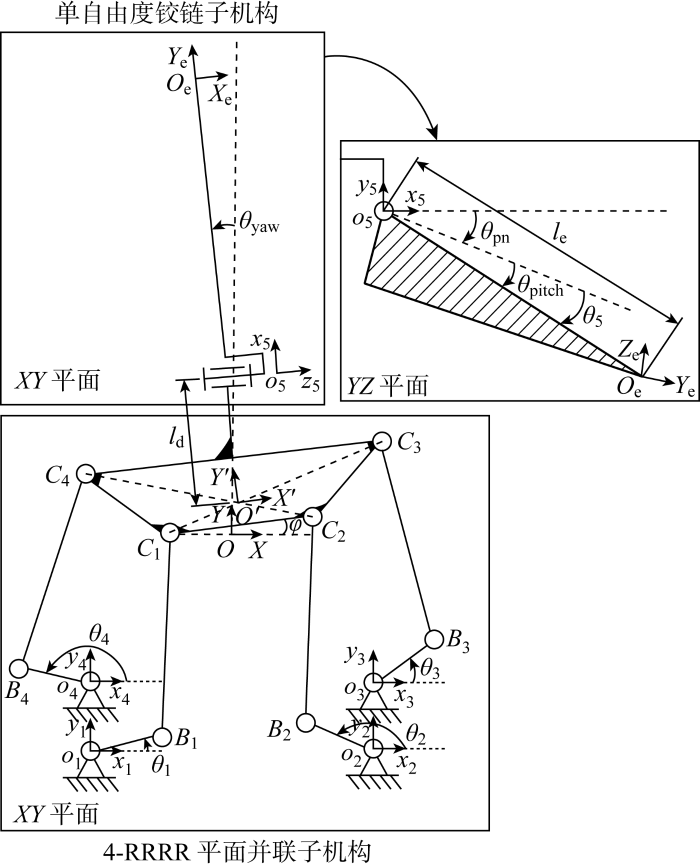
为复现人类下颌的3种基本运动模式及其复合运动,基于空间连杆设计了一种新颖的多自由度仿生下颌机构,如图3所示.该机构共有5个驱动自由度,由一个4-RRRR平面并联子机构和一个单自由度平面铰链子机构正交组成.其中单自由度铰链子机构用于实现仿生下颌骨在矢状面内的张合运动模式,如图3(a)所示,单自由度铰链子机构的两台总线舵机同轴逆向同步旋转,形成如图3(b)中的旋转运动R5,驱动仿生下颌骨进行张合运动模式.4-RRRR平面并联子机构用于实现仿生下颌骨在水平面内的前推和偏移运动模式,如图3(a)所示,该机构的4台数字舵机带动各自摇臂旋转,形成如图3(b)中的旋转运动R1~R4,通过中间连杆将运动传递至动平台,实现动平台在水平面内的位置和姿态控制.其中图3(b)中第4台舵机的旋转运动R4为冗余自由度,用于保证机构运动的驱动力和平稳性.下颌机构的基本尺寸遵循人类模特的下颌及头骨约束尺寸设计,同时受到仿人表情机器人内部其他驱动模块、相关电路布线等空间约束的影响,对其进行了紧凑性设计.此外下颌机构中连杆长度和铰链位置通过蒙特卡洛法确定其工作空间进行优化设计得到.
图3

图4

3 运动分析
3.1 逆向运动学分析
图5
设末端工具坐标系XeOeYe相对于世界坐标系XOY的RPY姿态向量Rjaw和位置向量Pjaw分别如下:
θpitch与ze存在依赖关系:
式中:le为连杆o5Oe的长度;θpn表示初始时刻连杆o5Oe与XY平面之间的夹角.
设动坐标系X'O'Y'相对于世界坐标系XOY的位姿矩阵为q=[
式中:ld表示关节o5与动坐标系X'O'Y'原点O'在XY平面内的投影距离;x、y、φ分别为动坐标系X'O'Y'在世界坐标系XOY中的坐标与转角.
在参考坐标系XOY中,由几何法可得封闭矢量方程:
式(5)写为以下标量方程:
利用三角万能公式求解式(6)可得图4中4个主动关节o1~o4的驱动角度θ1~θ4:
式中:li1、li2分别表示图5中摇臂oiBi、中间连杆BiCi的长度;li3、li4分别表示向量Ooi和CiO'的长度;ϕi'、αi分别表示向量和在世界坐标系XOY中的角度.
因此,可得仿生下颌机构5个主动关节o1~o5的驱动角度向量θdrive:
3.2 运动模式分析
多自由度仿生下颌机构依靠其4-RRRR平面并联子机构可实现对下颌末端的水平前推以及水平面内的旋转偏移,同时依靠单自由度铰链子机构可实现下颌末端在矢状面内的张合.多自由度仿生下颌机构运动模式如图6所示.图6(a)为机构在静止状态下的构型,对应人类下颌的静止闭合状态.依靠机构逆向运动学模型驱动如图6(b)所示的关节θ1~θ4联合动作,可使机构动平台产生y轴的轴向位移Δy,进而带动单自由度铰链子机构整体前移,实现下颌的前推运动模式.同理,在指定如图6(c)的偏移旋转中心R后,可依靠机构逆向运动学模型驱动关节θ1~θ4联合动作,使机构动平台和单自由度铰链子机构整体以R为中心旋转偏移转角θyaw,同时使下颌末端产生x、y轴向位移Δx和Δy,实现下颌的偏移运动模式.如图6(d)所示,单自由度铰链子机构在动平台的运动基础上,通过关节θ5旋转可实现在矢状面内的俯仰转角θpitch,并使下颌末端产生y、z轴向的叠加位移Δy和Δz,实现下颌的张合运动模式.基于上述3种运动模式,该多自由度仿生下颌机构能够实现对人类下颌运动的逼真模拟.
图6

4 实验与结果
4.1 基本运动模式实验
图7

图7
多自由度仿生下颌机构基本运动模式轨迹跟踪曲线
Fig.7
Trajectory tracking of basic motion mode of multi-DOF bionic jaw mechanism
4.2 复杂运动模式实验
图8

实验采用多自由度仿生下颌机构复现如图8所示的咀嚼运动轨迹,得到了如图9所示的XZ、YZ平面内对周期为T的咀嚼运动的实现效果.图中:t为运动时间.同时为分析运动频率对多自由度仿生下颌机构轨迹跟踪精度的影响,测试了其在运动频率f=1,2,3 Hz下对咀嚼运动轨迹的跟踪曲线, 如图10所示.结果表明,在1 Hz运动频率下,多自由度仿生下颌机构在XZ、YZ投影平面内对咀嚼运动轨迹的最大跟踪误差分别为0.5和 0.6 mm,跟踪效果较好.当运动频率上升至2 Hz时,机构在XZ、YZ投影平面内的最大跟踪误差分别为0.8和0.85 mm,对咀嚼轨迹的跟踪效果变差,在轨迹最低点附近的偏离尤为明显.当运动频率上升至3 Hz时,多自由度仿生下颌机构对咀嚼运动轨迹的跟踪精度进一步下降,在XZ、YZ投影平面内的最大跟踪误差分别上升至1.6和1.55 mm,约为1 Hz运动频率下跟踪误差的3倍.由此证明随着运动频率升高,多自由度仿生下颌机构的空间轨迹跟踪精度随之下降,分析其原因如图11所示.
图9

图9
多自由度仿生下颌机构咀嚼运动效果
Fig.9
Effect of chewing motion of multi-DOF bionic jaw mechanism
图10

图10
不同运动频率下多自由度仿生下颌结构咀嚼运动轨迹
Fig.10
Chewing trajectory of structure of multi-DOF bionic jaw at different motion frequencies
图11

图11
不同频率咀嚼运动下多自由度仿生下颌机构最高舵机转矩仿真结果
Fig.11
Simulation results of the highest steering gear torque of multi-DOF bionic jaw mechanism at different frequencies of chewing motion
图11显示了MATLAB多刚体仿真下,多自由度仿生下颌机构在不同运动频率下的最高舵机转矩曲线,即每一时刻机构中所有6台舵机的峰值转矩.可见随着运动频率的升高,最高舵机转矩峰值逐渐逼近舵机极限转矩,此时运动频率过快则舵机转矩无法完全克服部件惯性力和摩擦力作用,从而无法提供足够的驱动力,最终导致机构对咀嚼轨迹的跟踪精度下降.因此,在使用多自由度仿生下颌机构跟踪空间轨迹时不宜选择过高的运动频率.
图12
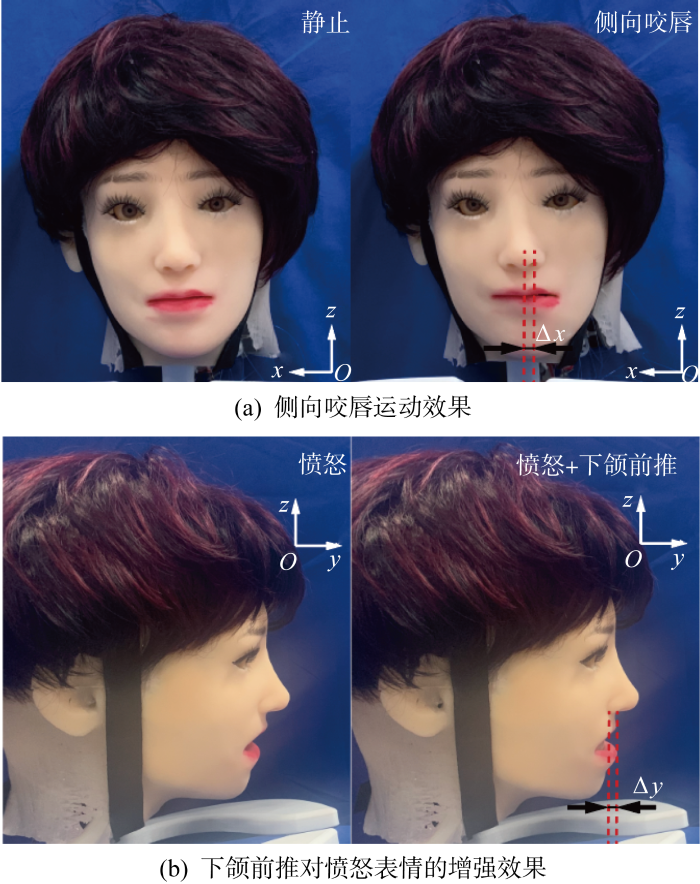
图12
多自由度仿生下颌机构与口部皮肤的耦合运动效果
Fig.12
Coupling motion of multi-DOF bionic jaw and oral skin
5 结语
本文针对目前仿人表情机器人口部动作僵硬、运动模式单一的问题,设计了一种新颖的多自由度仿生下颌机构,并对其进行了逆向运动学建模和运动模式分析.通过仿真和实验证明了该机构能够模拟人类下颌的张合、前推、偏移基本运动模式,同时能够实现以咀嚼运动为代表的复杂运动模式,提升了仿人表情机器人的口部运动灵活性,为仿人表情机器人的口部驱动机构设计提供了一种新的思路.
参考文献
Head design and optimization of an emotionally interactive robot for the treatment of autism
[C]//
Facially expressive humanoid robotic face
[J].
Realistic child robot “affetto” for understanding the caregiver-child attachment relationship that guides the child development
[C]//
Mechanical Design of robot head with human-like emotions
[C]//21st International Conference on Control, Automation and Systems. Barcelona, Spain: IEEE, 2021: 1720-1725.
Design of voice synchronized robotic lips
[C]//
Development and experiment of facial robot SHFR-III
[C]//2015 IEEE International Conference on Mechatronics and Automation. Beijing, China: IEEE, 2015: 1944-1949.
Design, Analysis and experimental research of humanoid head robot
[C]//
Modelling of mandibular movement
[J].
Facial affect scoring technique: A first validity study
[J].
Oral anatomy and physiology
[C]// Wiggs’s Veterinary Dentistry: Principles and Practice.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}