上海交通大学学报 ›› 2024, Vol. 58 ›› Issue (8): 1231-1239.doi: 10.16183/j.cnki.jsjtu.2022.469
赵威, 袁绍珂, 李忆楠, 费燕琼( )
)
收稿日期:2022-11-21
修回日期:2023-01-12
接受日期:2023-03-03
出版日期:2024-08-28
发布日期:2024-08-27
通讯作者:
费燕琼,教授,电话(Tel.):021-34201458; E-mail:作者简介:赵 威(1996-),硕士生,从事仿人表情机器人研究.
基金资助:
ZHAO Wei, YUAN Shaoke, LI Yinan, FEI Yanqiong()
Received:2022-11-21
Revised:2023-01-12
Accepted:2023-03-03
Online:2024-08-28
Published:2024-08-27
摘要:
针对目前仿人表情机器人口部运动模式单一的问题,基于人类下颌的解剖学运动机理,设计了一种新颖的多自由度仿生下颌机构.建立了仿生下颌机构的逆向运动学模型,分析了其运动模式,实现了仿生下颌机构在空间中的多自由度运动.对多自由度仿生下颌机构进行了多刚体仿真,并通过实验验证了其可行性.仿真和实验结果表明,基于逆向运动学模型,该机构可以模拟人类下颌的张合、前推、偏移3种基本运动模式,以及咀嚼、咬唇等口部复杂运动模式,弥补了现有仿人表情机器人口部运动模式受限的问题.
中图分类号:
赵威, 袁绍珂, 李忆楠, 费燕琼. 仿人表情机器人的下颌机构设计与运动[J]. 上海交通大学学报, 2024, 58(8): 1231-1239.
ZHAO Wei, YUAN Shaoke, LI Yinan, FEI Yanqiong. Design and Motion Analysis of Bionic Jaw Mechanism for Humanoid Expression Robot[J]. Journal of Shanghai Jiao Tong University, 2024, 58(8): 1231-1239.
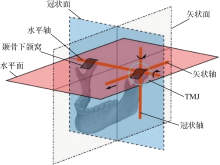
图1
人类下颌骨运动参考轴及运动参考平面
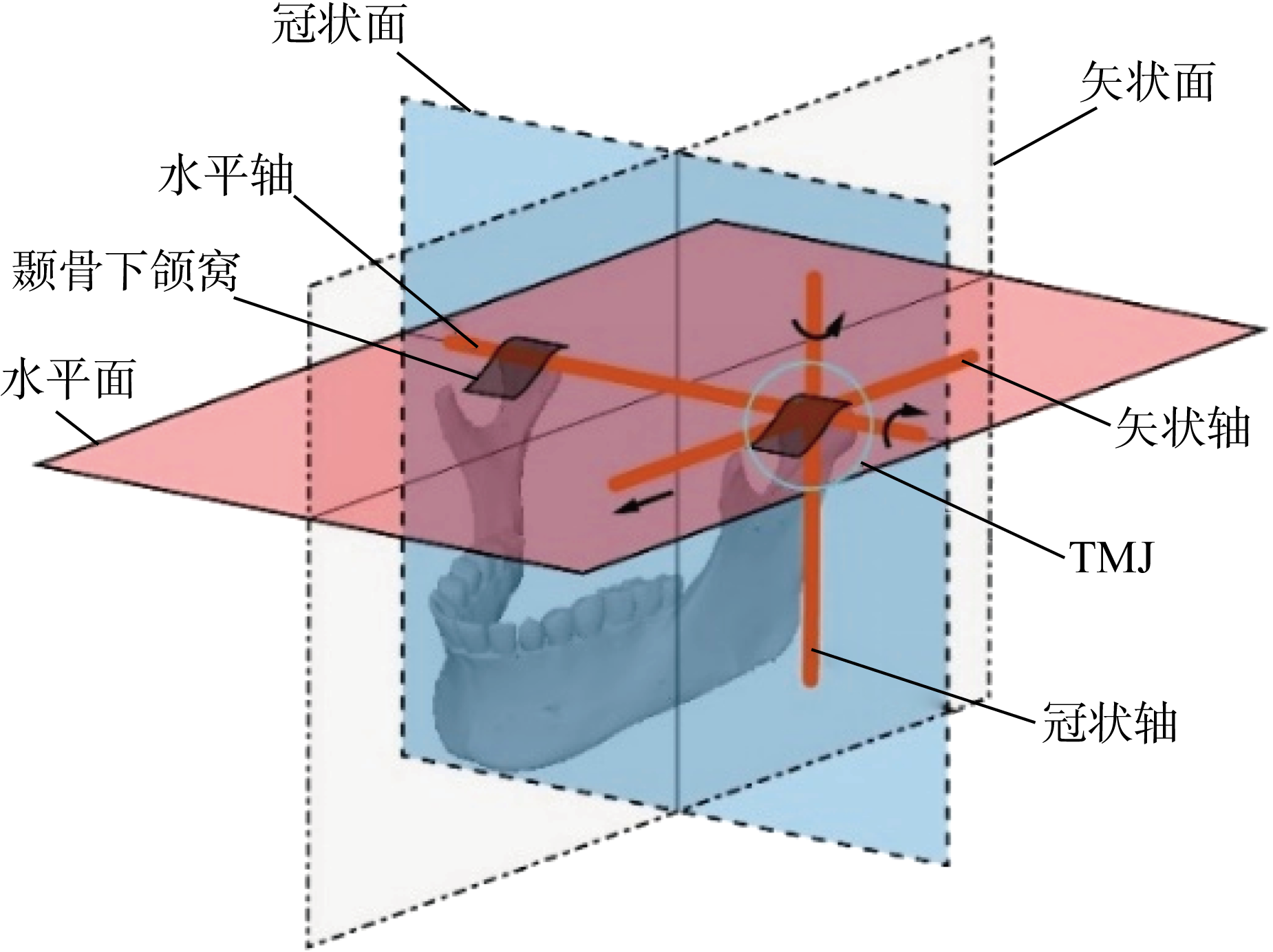
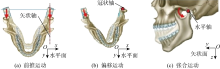
图2
人类下颌骨的3种基本运动模式
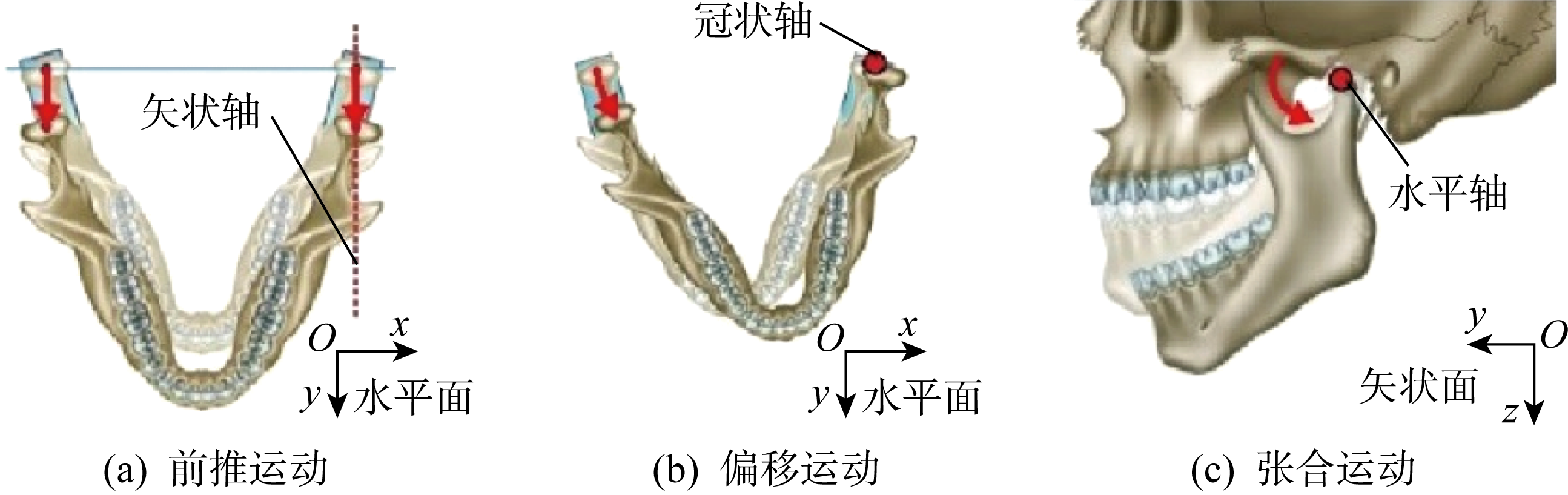
表1
下颌运动与运动单元映射关系表
| 运动单元 | 下颌运动 | 对应肌肉 |
|---|---|---|
| AU26 | 下颌下降 | 咬肌、颞肌、翼状肌 |
| AU29 | 下颌外推 | 翼状肌 |
| AU30 | 下颌侧移 | 翼状肌、咬肌、颞肌 |
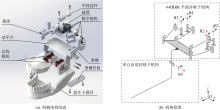
图3
多自由度仿生下颌机构
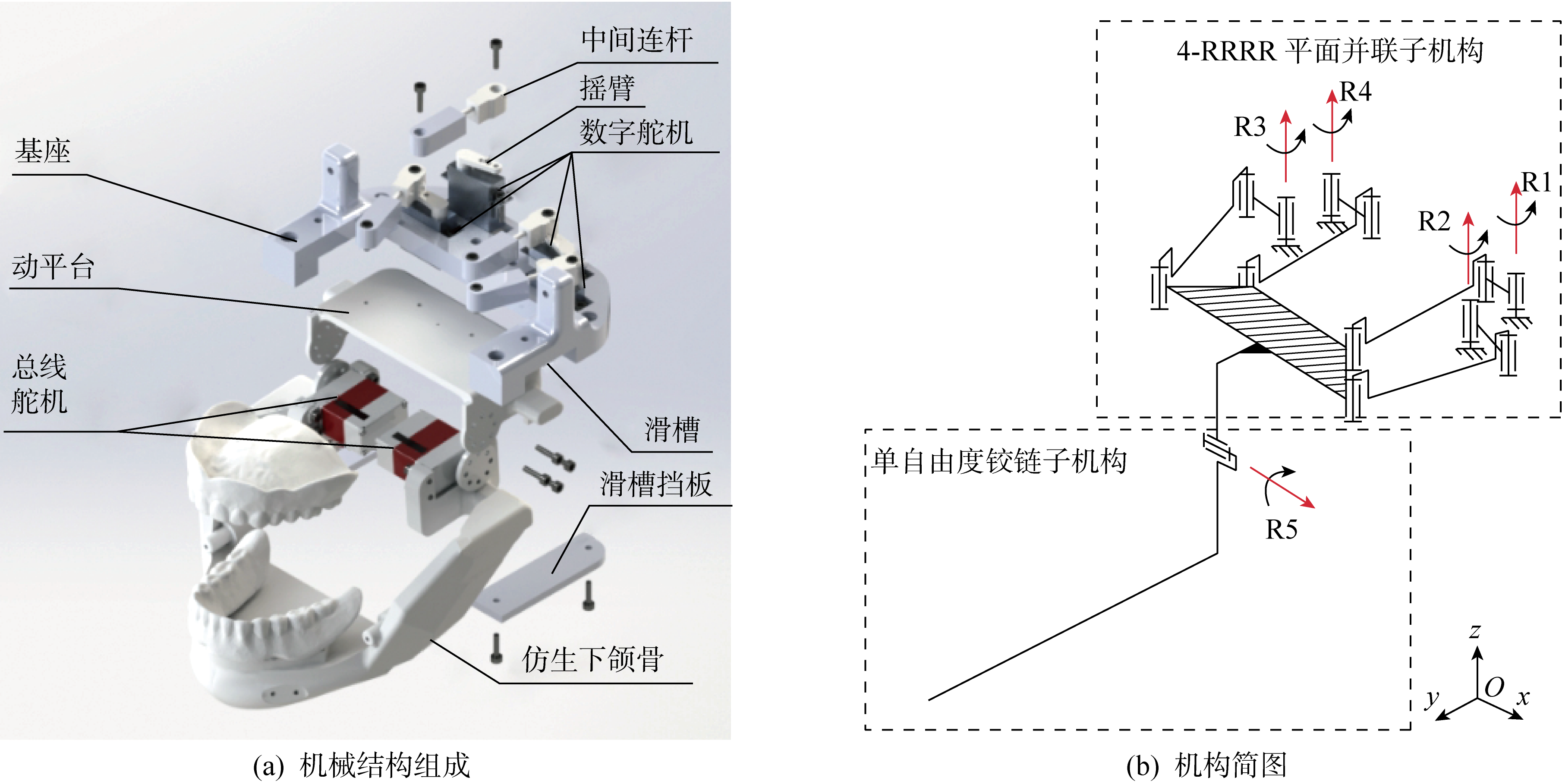
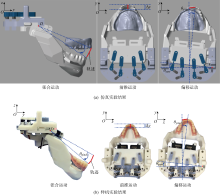
图4
多自由度仿生下颌机构运动效果
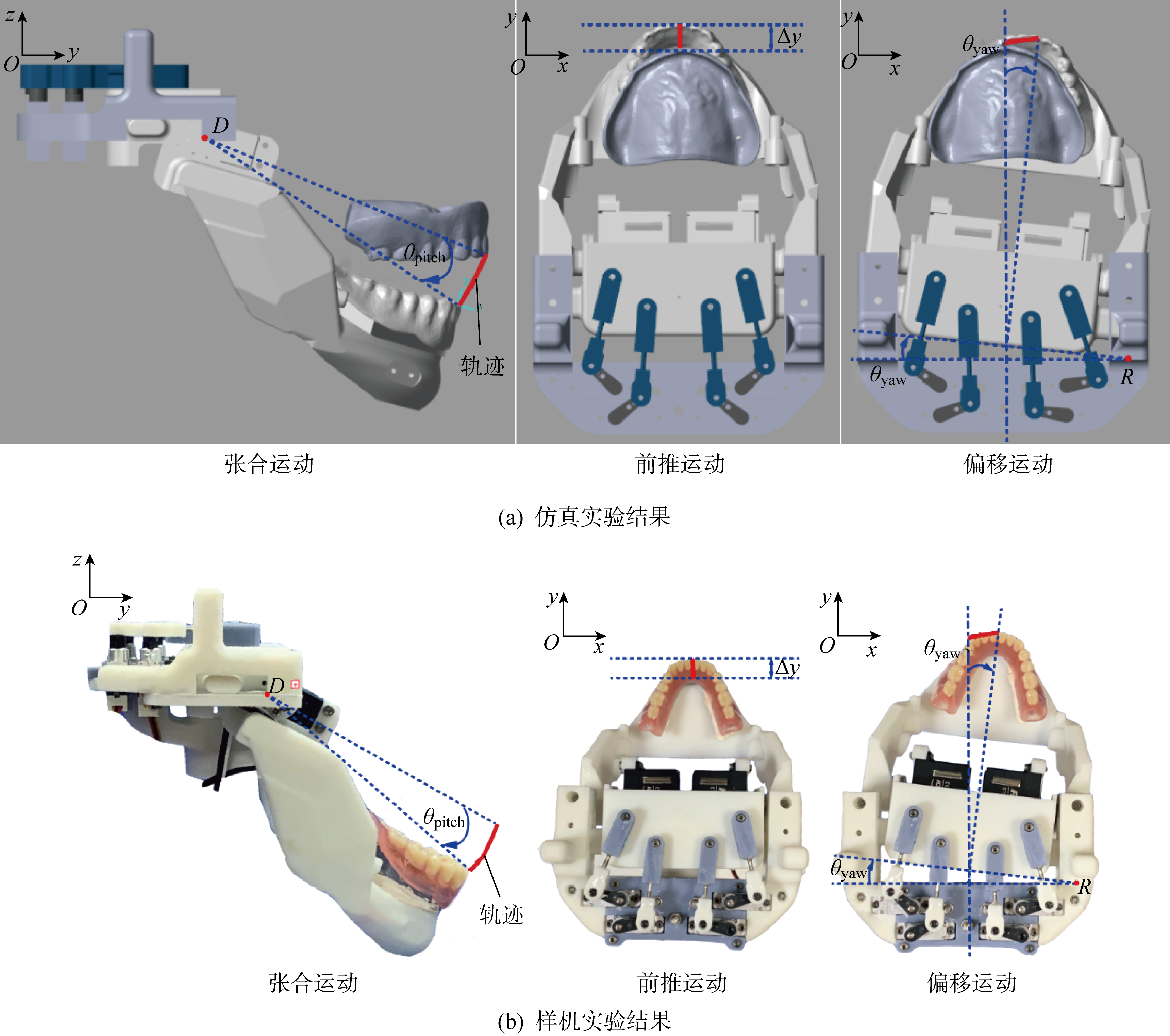
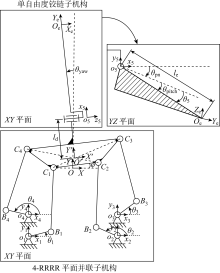
图5
多自由度仿生下颌机构运动简图
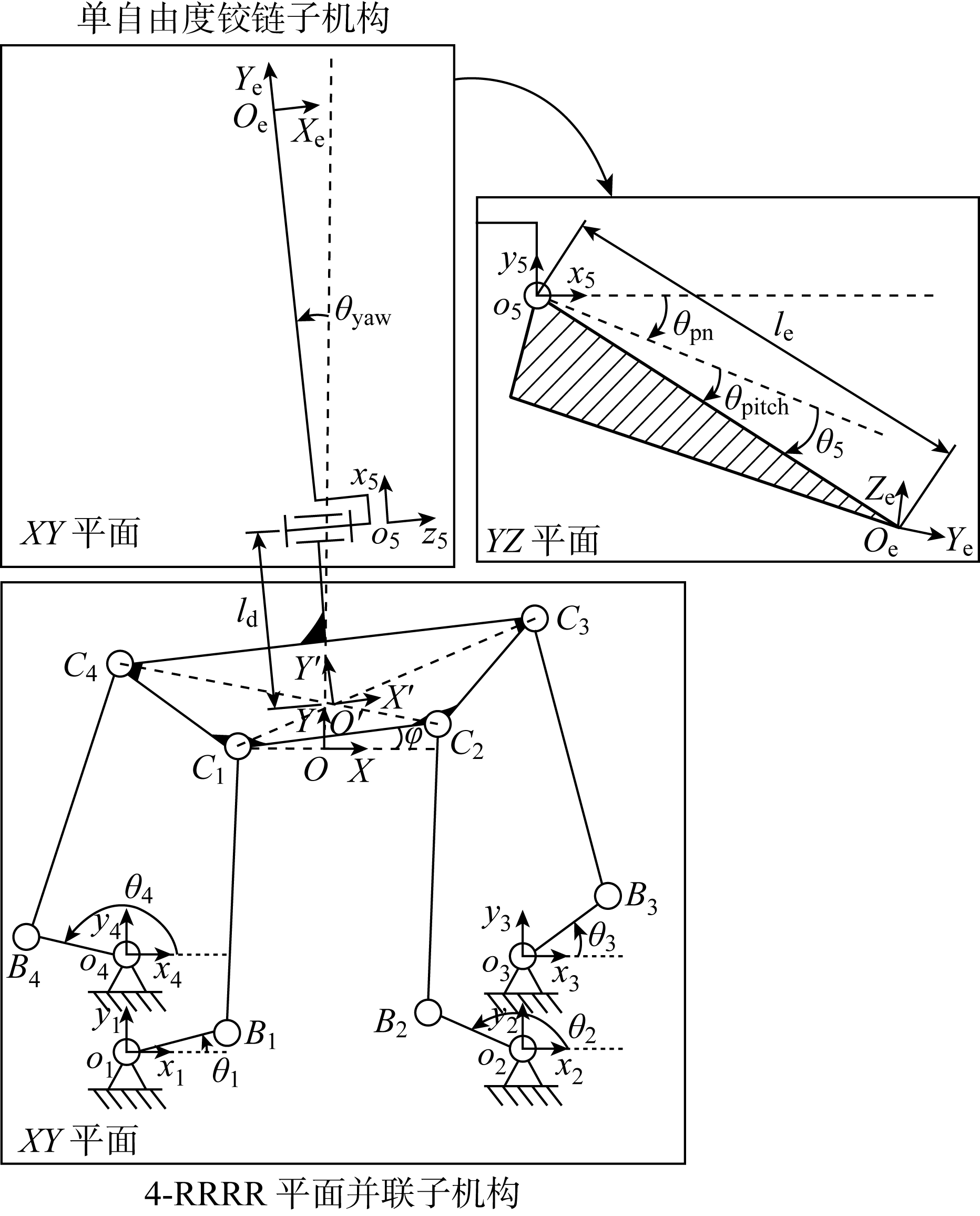
图6
多自由度仿生下颌机构运动模式
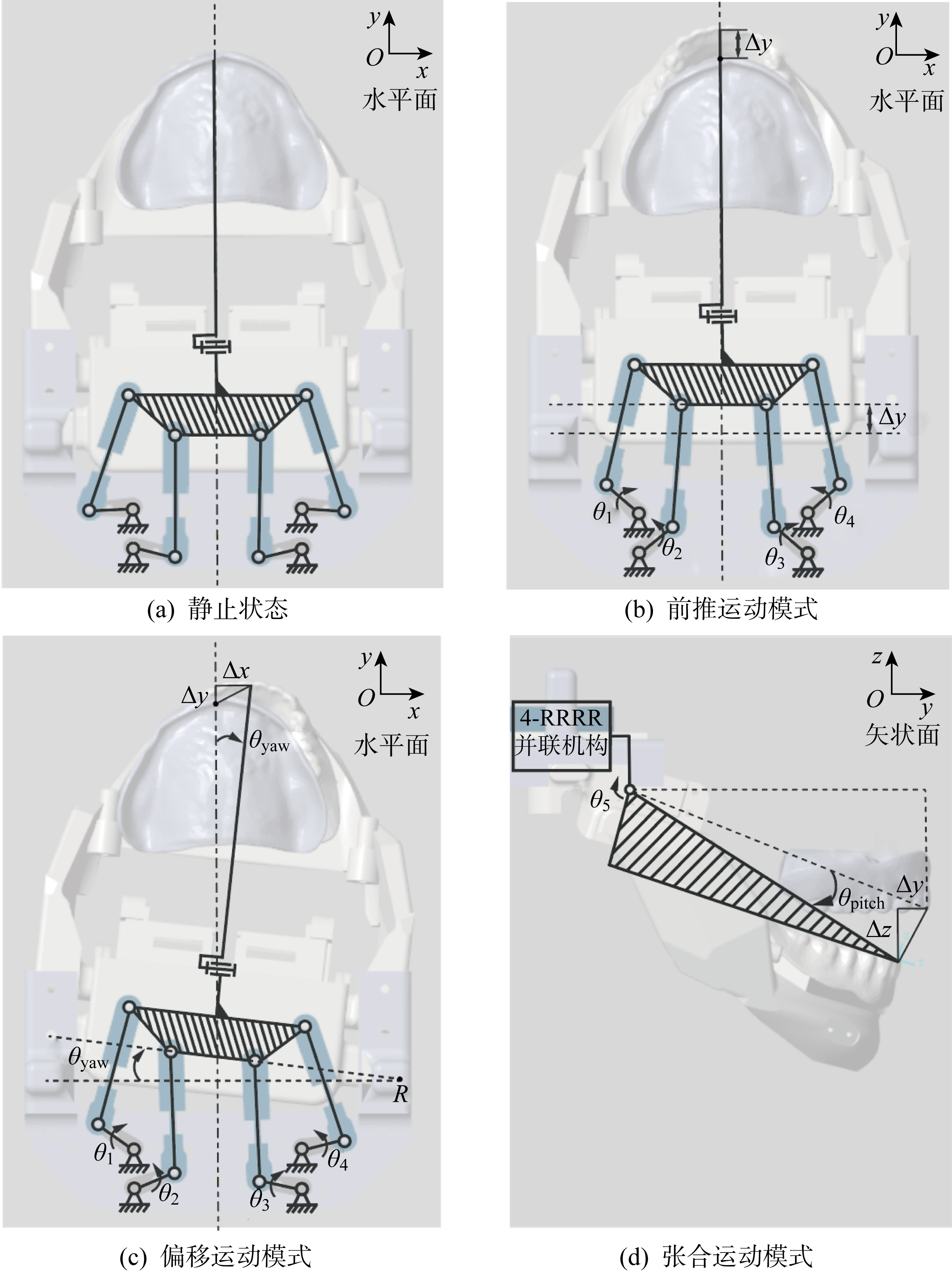

图7
多自由度仿生下颌机构基本运动模式轨迹跟踪曲线
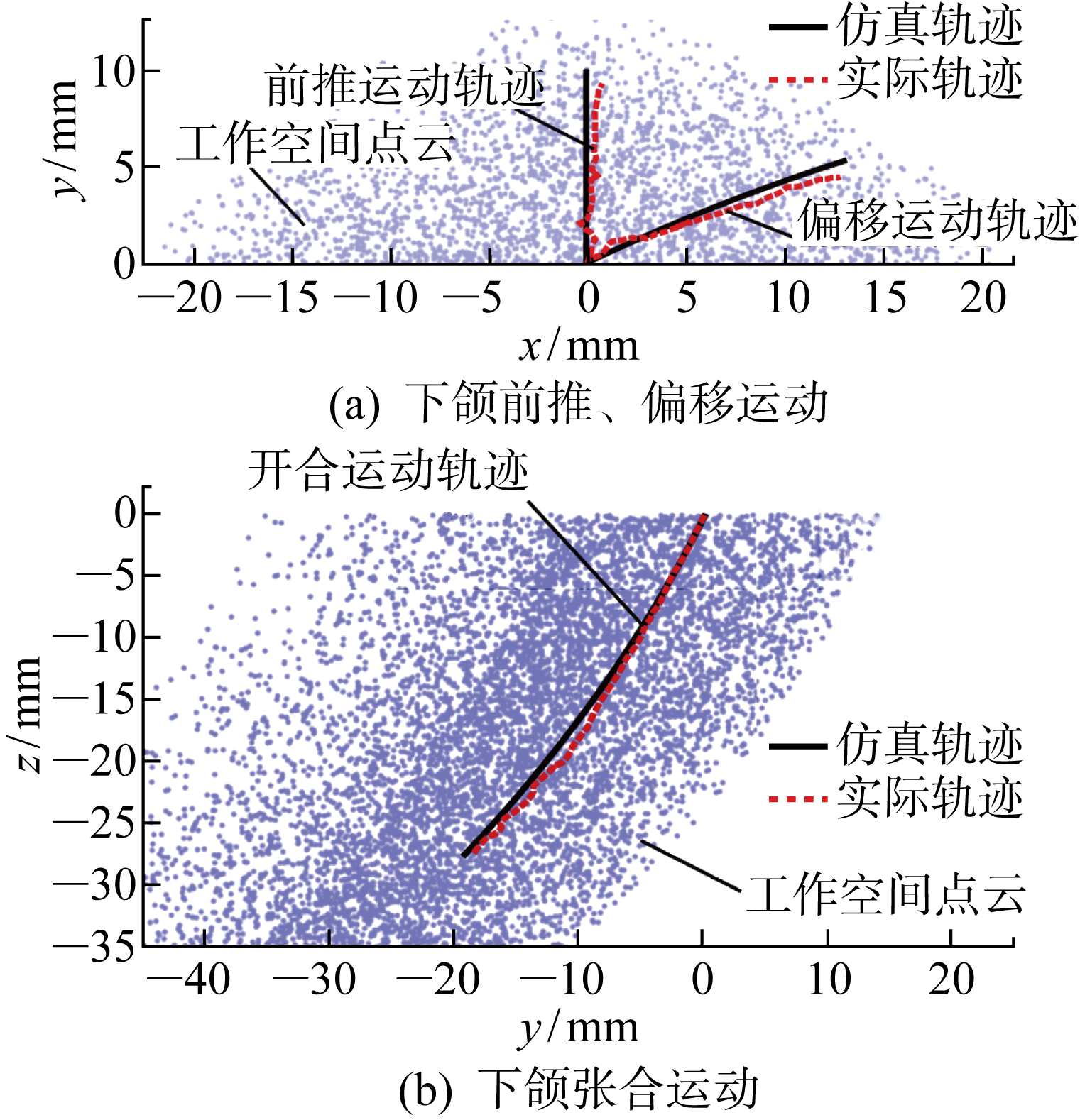
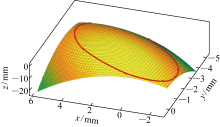
图8
咀嚼运动空间拟合轨迹
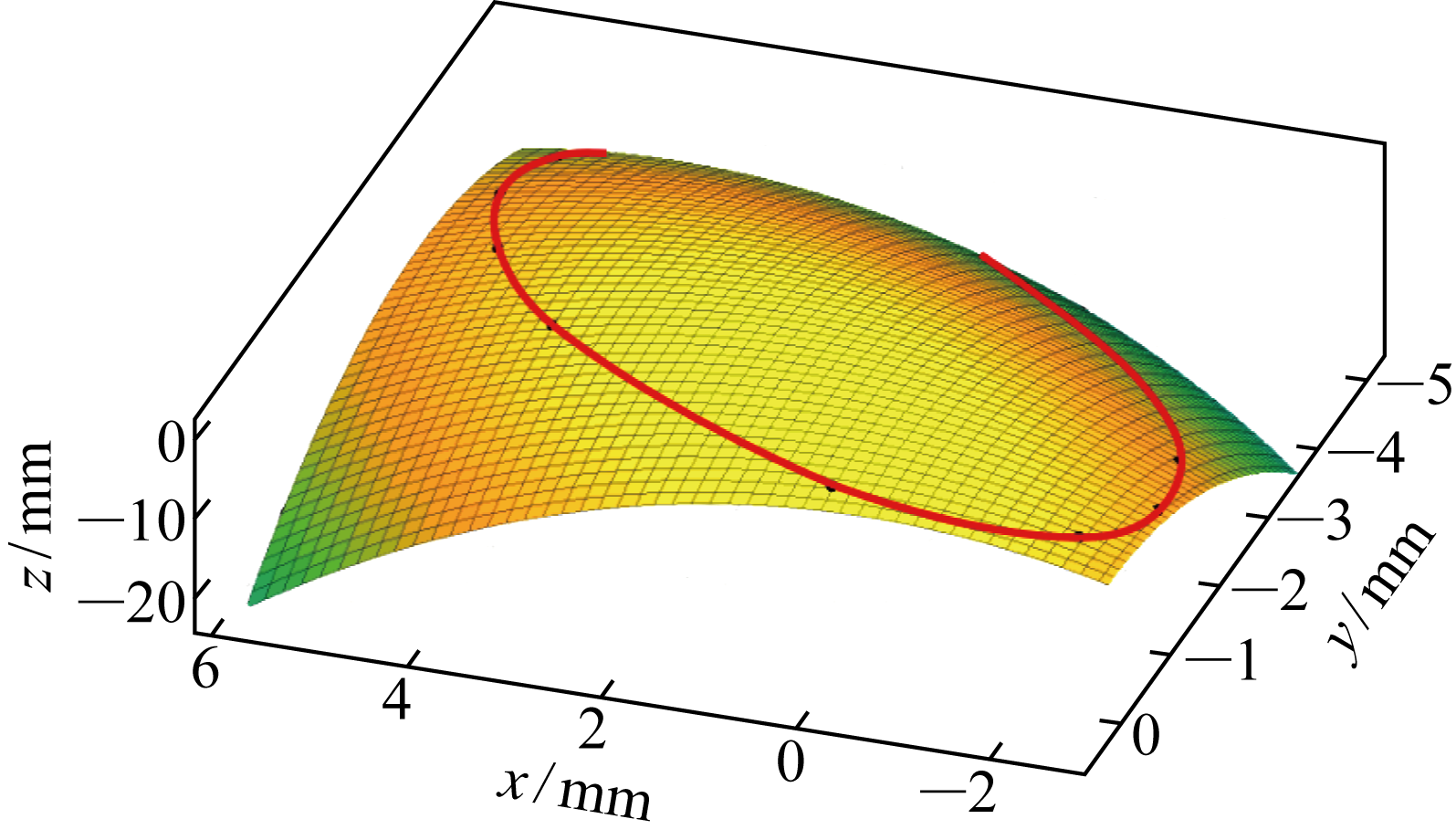

图9
多自由度仿生下颌机构咀嚼运动效果


图10
不同运动频率下多自由度仿生下颌结构咀嚼运动轨迹
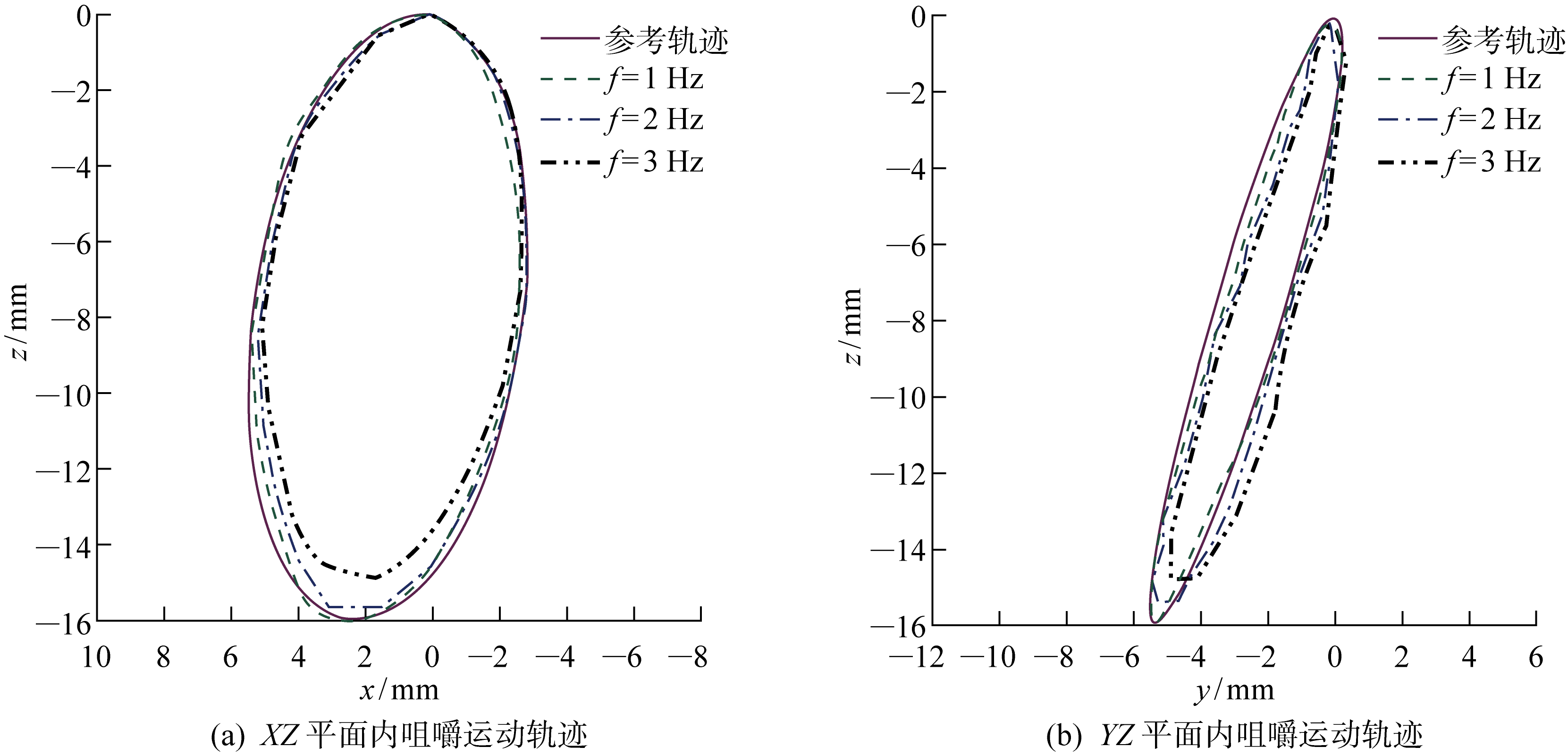
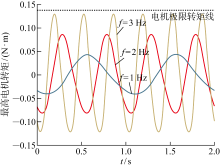
图11
不同频率咀嚼运动下多自由度仿生下颌机构最高舵机转矩仿真结果

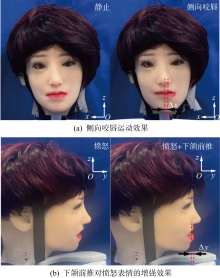
图12
多自由度仿生下颌机构与口部皮肤的耦合运动效果

| [1] | WU F, LIN S, CAO X, et al. Head design and optimization of an emotionally interactive robot for the treatment of autism[C]// Proceedings of the 2019 4th International Conference on Automation, Control and Robotics Engineering. Shenzhen, China: Association for Computing Machinery, 2019: 1-10. |
| [2] | FARAJ Z, SELAMET M, MORALES C, et al. Facially expressive humanoid robotic face[J]. HardwareX, 2020, 9: e00117. |
| [3] | ISHIHARA H, YOSHIKAWA Y, ASADA M. Realistic child robot “affetto” for understanding the caregiver-child attachment relationship that guides the child development[C]// IEEE International Conference on Development and Learning. Frankfurt am Main, Germany: IEEE, 2011, 2: 1-5. |
| [4] | TOAN N K, THINH N T. Mechanical Design of robot head with human-like emotions[C]//21st International Conference on Control, Automation and Systems. Barcelona, Spain: IEEE, 2021: 1720-1725. |
| [5] | MADUMAL K A D A, JAYAWEERA J, ALAHAKOON P M K, et al. Design of voice synchronized robotic lips[C]// 2021 3rd International Conference on Electrical, Control and Instrumentation Engineering. Kuala Lumpur, Malaysia: IEEE, 2021: 1-5. |
| [6] | YANG Y, KE X, XIN J, et al. Development and experiment of facial robot SHFR-III[C]//2015 IEEE International Conference on Mechatronics and Automation. Beijing, China: IEEE, 2015: 1944-1949. |
| [7] | LIU H, CHEN W, GU H, et al. Design, Analysis and experimental research of humanoid head robot[C]// 2021 IEEE 11th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems. Jiaxing, China: IEEE, 2021: 909-914. |
| [8] | ZARINS U. Anatomy of facial expressions[M]. European Union: Exonicus Incorporated, 2018. |
| [9] | FANG J J, KUO T H. Modelling of mandibular movement[J]. Computers in Biology and Medicine, 2008, 38(11/12): 1152-1162. |
| [10] | OZKAN Y K. Movements and mechanics of mandible occlusion concepts and laws of articulation[M]. Turkey: Quintessence, 2018: 293-347. |
| [11] | EKMAN P, FRIESEN W V, TOMKINS S. Facial affect scoring technique: A first validity study[J]. Semiotica III, 1971, 3(1): 37-58. |
| [12] | EKMAN P, FRIESEN W V. Facial action coding system[J]. A Human Face, 2002, 73(2): 115-163. |
| [13] | 王海杰. 人体系统解剖学[M]. 上海: 第二军医大学出版社, 2015. |
| WANG Haijie. Human systemic anatomy[M]. Shanghai: Naval Medical University Press, 2015. | |
| [14] | 姜振宇. 微表情[M]. 北京: 中国友谊出版公司, 2020. |
| JIANG Zhenyu. Microexpression[M]. Beijing: China Friendship Press, 2020. | |
| [15] | 张展铭. 论表情媒介[D]. 济南: 山东艺术学院, 2016. |
| ZHANG Zhanming. The medium of expression[D]. Jinan: Shandong College of Arts, 2016. | |
| [16] | EKMAN P. Emotions revealed[M]. 2nd ed. Denmark: Owl Books, 2003. |
| [17] | 邵磊. 微表情分析[M]. 北京: 科学出版社, 2014. |
| SHAO Lei. Microexpression analysis[M]. Beijing: Science Press, 2014. | |
| [18] | LEMMONS M, BEEBE D. Oral anatomy and physiology[C]// Wiggs’s Veterinary Dentistry: Principles and Practice. Hoboken, USA: John Wiley and Sons, 2019: 1-24. |
| [19] | 李娟. 不同年龄组正常人群的下颌运动轨迹及咀嚼肌表面肌电比较研究[D]. 昆明: 昆明医科大学, 2013. |
| LI Juan. A comparative study of mandibular movement trajectory and masticatory muscle surface electromyography in normal people of different age groups[D]. Kunming: Kunming Medical University, 2013. | |
| [20] | 博煜. 图解微反应[M]. 北京: 现代出版社, 2016. |
| BO Yu. The diagram of micro-reaction[M]. Beijing: Modern Press, 2016. |
| [1] | 王琦, 李绿洲, 董旭, 袁宁一, 丁建宁. 轨迹可控的微型水母机器人研制[J]. 上海交通大学学报, 2024, 58(8): 1240-1248. |
| [2] | 丁显廷. 单细胞生命体的系统工作原理是什么?[J]. 上海交通大学学报, 2021, 55(Sup.1): 14-15. |
| [3] | 何云涛1,孔博2,3,奚小冰2,3,罗云1. 一种用于桡骨远端骨折的新型医用小夹板设计与评价[J]. 上海交通大学学报(自然版), 2018, 52(2): 194-199. |
| [4] | 王江北,方晔阳,童歆,张帅,费燕琼. 多气囊仿生软体机器人设计及其运动特性分析[J]. 上海交通大学学报(自然版), 2018, 52(1): 20-25. |
| [5] | 周俊帆,罗云. 基于重力驱动的坐姿矫正机构原理及其设计[J]. 上海交通大学学报(自然版), 2016, 50(02): 182-187. |
| [6] | 徐明峰,朱良凡,周文选,罗云. 新型免载方式的膝关节矫形器设计与评价[J]. 上海交通大学学报(自然版), 2014, 48(02): 181-186. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||