

微型水下机器人凭借自身微小的尺寸和灵活性在水下资源勘查、环境监测、设备故障诊断以及军事领域有着重要的应用价值和广阔的应用前景[1⇓-3].但是,如何在较小机身尺寸下实现高效的轨迹控制成为了微型水下机器人研究的难点问题.水下生物的游动具有效率高、噪声低和机动性强等特点,相较于螺旋桨推进机构具有独特优势[4-5].例如,水母使用周期性脉冲动作控制身体空腔摄入和排出水流,达到了脉冲推进的目的,这使水母具有在短时间内获得较大瞬时推力、加速性能好、环境适应性强等优点[6].水母还可以控制空腔肌肉进行非对称性收缩来改变水流喷射方向,由此可以进行高度控制、悬停和水平方向的移动,可以在水下三维空间内进行任意轨迹的游泳[7].目前,科研人员仿照水母的游泳方式开发了多种水下机器人[4⇓⇓⇓⇓-9].
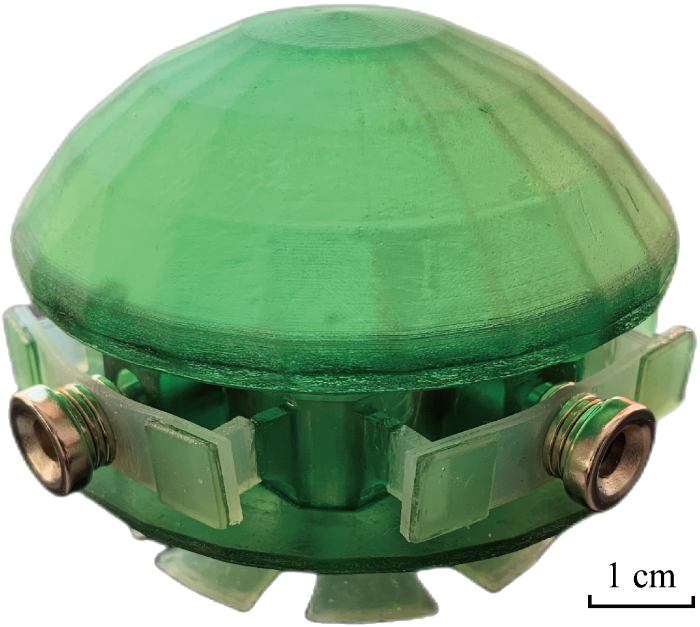
本文以机器人JR的仿水母推进器为基础,开展了一种轨迹可控的水母机器人研究.该机器人由气室、重心调整机构以及仿水母推进器组成,尺寸为⌀6.8 cm×5.3 cm,将之命名为机器人JRT.通过对仿水母推进器和重心调整机构进行协同控制,实现了机器人JRT在水下三维空间内的高度调整、悬停和水平定向游泳以及水平弹射.综上,机器人JRT有望在水下资源勘查、环境监测等领域得到应用.
1 微型水母机器人JRT的设计
1.1 总体结构与制备
图1
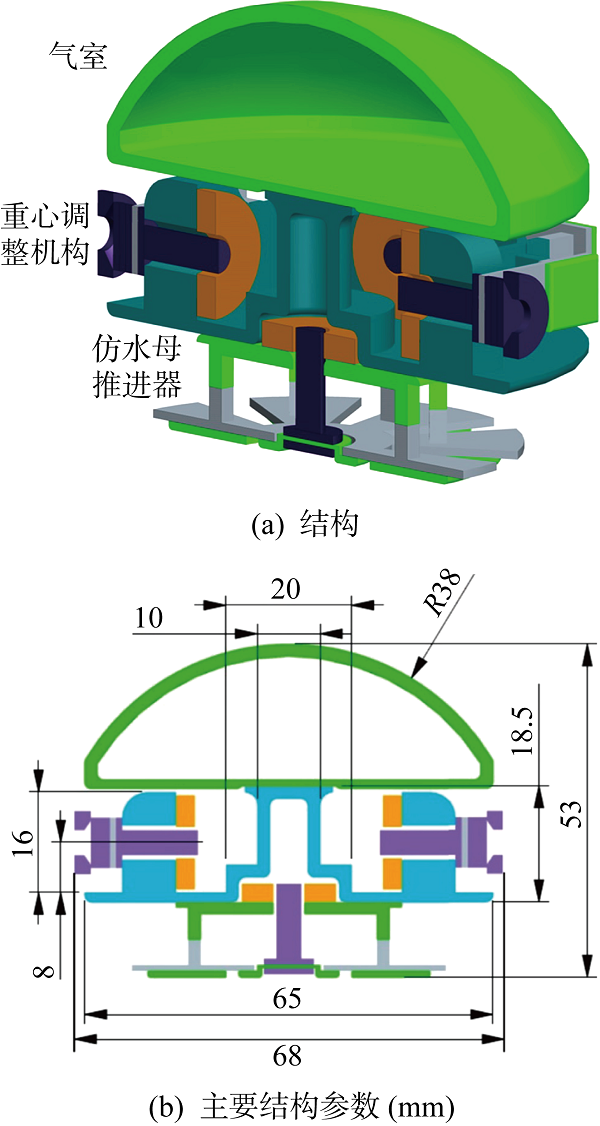
图2
1.2 仿水母推进器的结构及其原理说明
图3
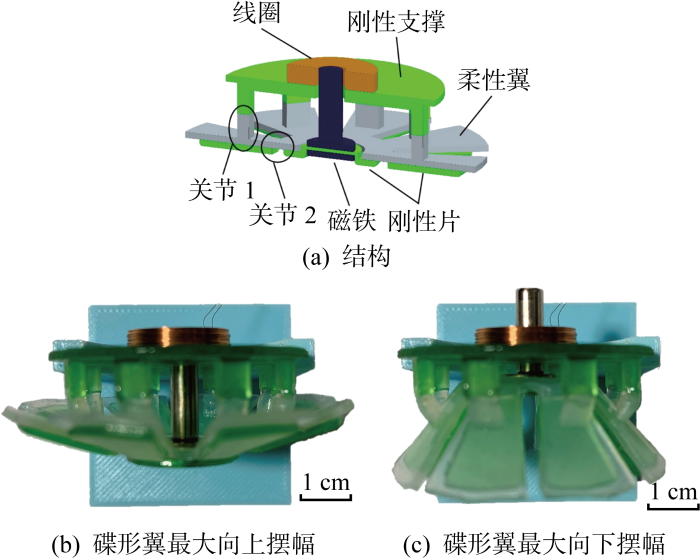
图4

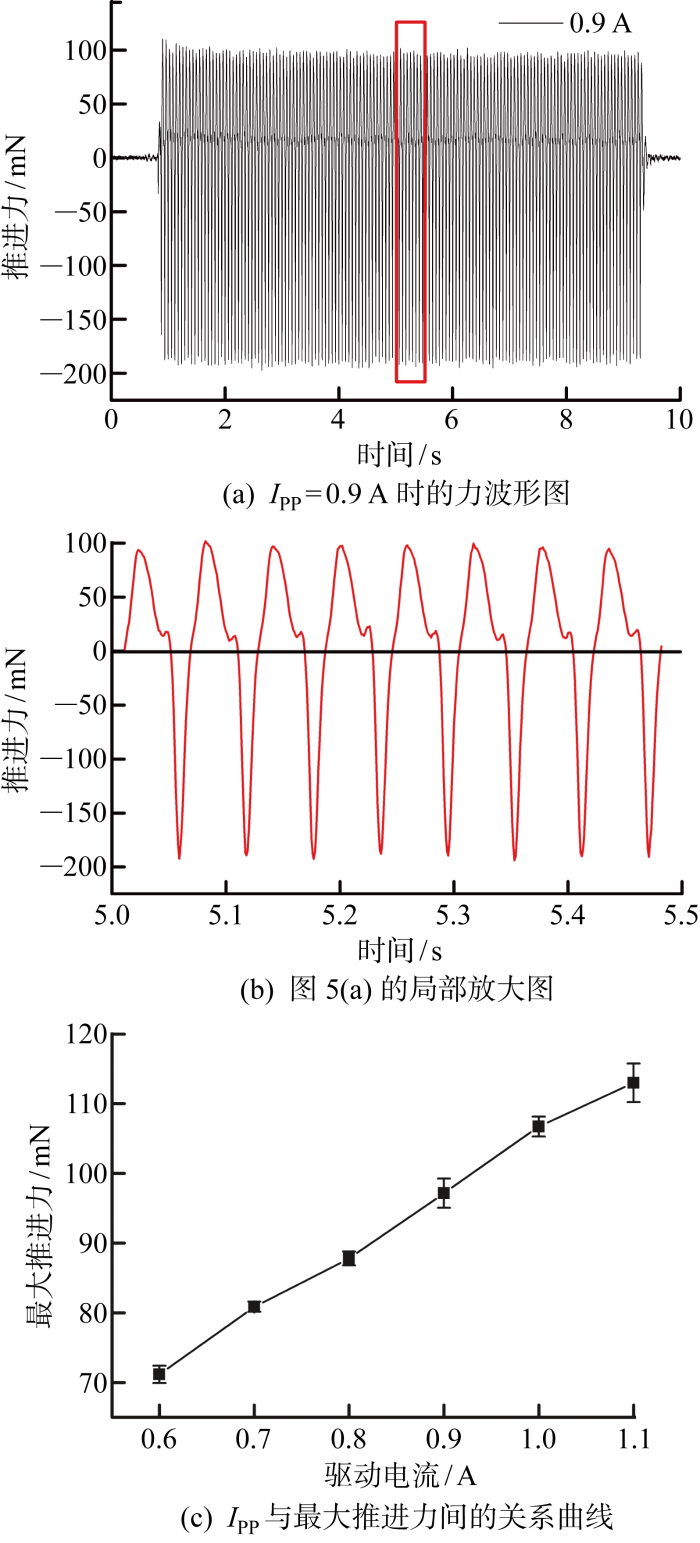
图5
1.3 重心调整机构及其控制方法
图6
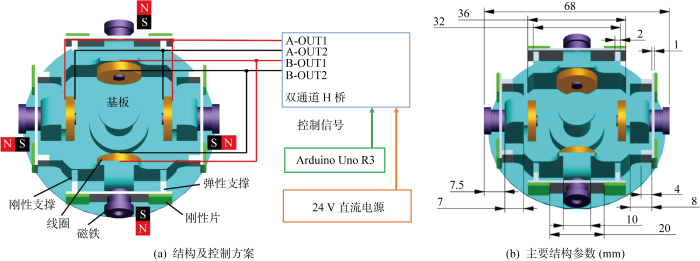
以水平两个电磁驱动装置为例,当电流为正时两个磁铁将受到向左的力.右侧磁铁受到刚性支撑的阻挡不会产生位移,这是为了避免磁铁向内位移后与仿水母电磁推进器的磁铁和线圈产生电磁耦合.左侧磁铁将向左移动Δxg,这可使机器人JRT重心向左偏移[13]:
式中:mg=3.8 g,是位移磁铁的质量.机器人JRT的重心产生位移Δx后,会形成一个倾斜运动的转矩,最终形成倾斜角:
式中:h为初始状态下稳心的高度.基于这一原理,可沿4个方向对圆盘重心进行调控.最后,去除加载于线圈的电流,磁铁可在柔性支撑的弹性恢复力作用下移动到初始位置.
图7
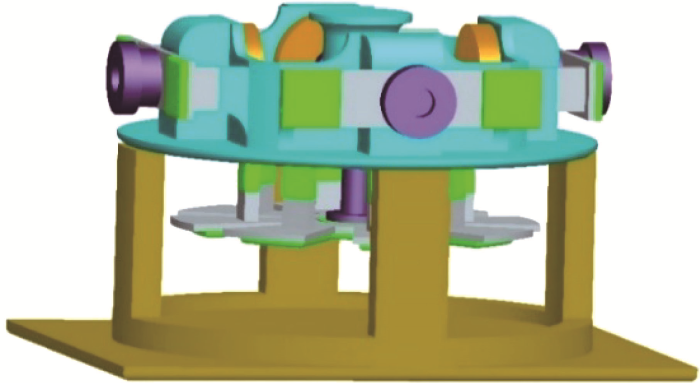
图7
重心调整机构验证实验方法
Fig.7
Experimental method for verification of center of gravity adjusting mechanism
图8
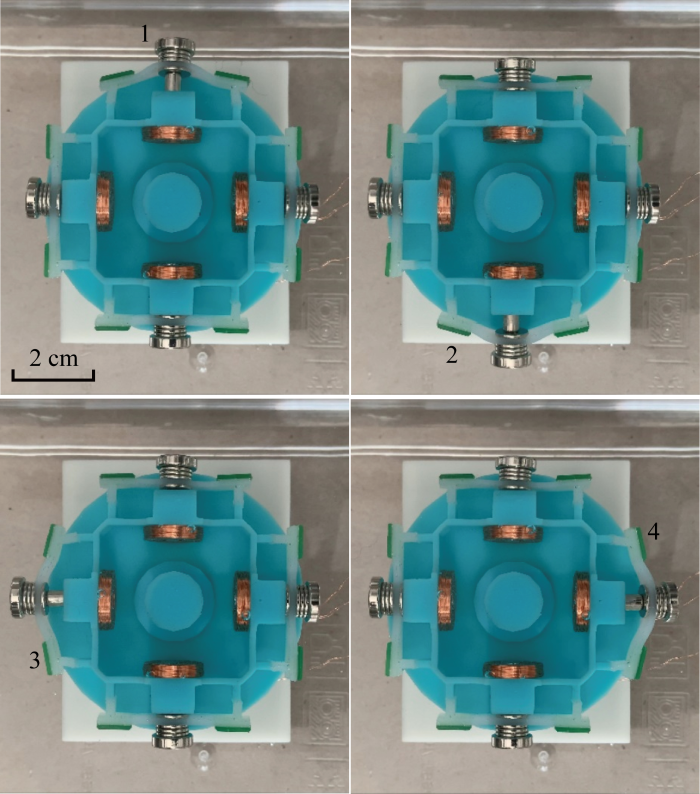
图8
重心调整机构的控制实现
Fig.8
Control realization of center of gravity adjustment mechanism
2 运动状态分析
2.1 竖直方向游泳运动状态分析
机器人JRT在水下运动过程中将受到自身重力FG、浮力FB的作用.二者可由机器人自身质量m和在水中的质量mW计算得到,分别为563.5 mN和522.34 mN.另外,机器人JRT还将受到沿竖直方向的流体阻力DV、沿竖直方向的加速反作用力GV、沿竖直方向的动量变化力SV,以及驱动脉冲周期内的平均推进力的作用.流体阻力DV可表示为[5]
式中:uV为机器人JRT沿竖直方向的游泳速度;ρ为水的密度,取1 g/cm3;sV为机器人JRT在竖直方向游泳时的投影面积,约为33.2 cm2;c为阻力系数,将通过后续实验数据获取.沿竖直方向的加速反作用力GV、沿竖直方向的动量变化力SV与加速度正相关,当机器人JRT匀速游泳时,二者将为0.
因此,机器人JRT在姿态没有倾斜的状态下,游泳过程中的力平衡关系[5]可表示为
式中:t为时间.令FG-FB+DV+GV+SV=WV表示机器人JRT沿竖直方向游泳时受到的总反作用力,式(4)可变换为
由式(5)可以判断机器人JRT沿竖直方向的游泳具有以下几种运动状态.
(1) 当
(2) 当
(3) 当
2.2 水平方向游泳运动状态分析
当控制重心调整机构使机器人JRT姿态倾斜θ之后,仿水母推进器产生的推进力也将倾斜θ,具体如图9所示.此时,推进力可分解为沿竖直方向的力FV和沿水平方向的力FH:
图9
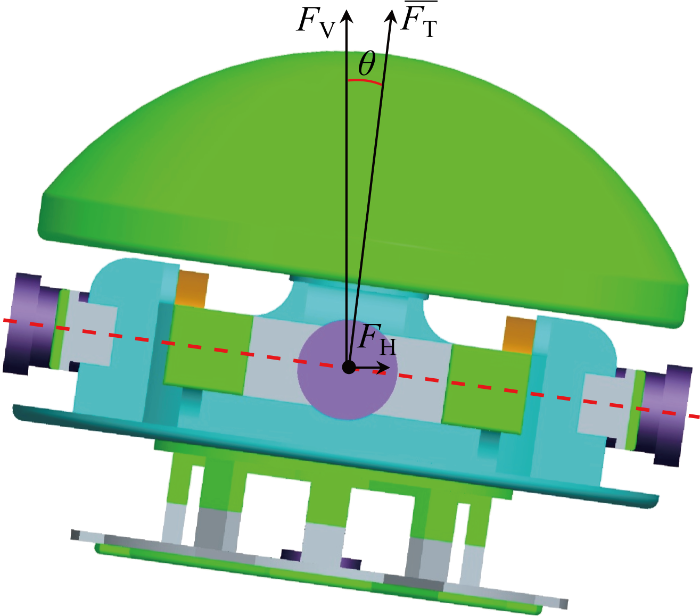
在这一状态下,控制FV=WV,且uV=0 cm/s,则可使机器人JRT保持在指定高度.同时,机器人JRT将受到沿水平方向的流体阻力DH、沿水平方向的加速反作用力GH、沿水平方向的惯性力SH,以及力FH的作用.沿水平方向游泳的阻力DH的计算公式为
式中:uH为机器人JRT沿水平方向的游泳速度;sH为机器人JRT在水平方向游泳时的投影面积,取值约为30 cm2.另外,沿水平方向的加速反作用力GH、沿水平方向的动量变化力SH与加速度正相关.当机器人JRT匀速游泳时,二者将为0.
因此,机器人JRT沿水平方向的力平衡关系可表示为
此外,令DH+GH+SH=WH表示机器人JRT沿水平方向游泳时受到的总反作用力,式(8)可变为
由式(9)可知,在机器人JRT保持在指定高度不变的情况下,将具有以下几种运动状态.
(1) 当FH>WH时,duH/dt>0 cm/s2,机器人JRT沿水平方向加速游泳.
(2) 当FH<WH时,duH/dt<0 cm/s2,机器人JRT将沿水平方向减速游泳.
(3) FH=WH时,duH/dt=0 cm/s2,机器人JRT将沿水平方向匀速游泳,此时FH=-DH.
基于上述运动状态分析,可以通过调整加载到仿水母驱动器上的驱动电流IPP控制推进力
3 机器人JRT轨迹控制实验研究
3.1 轨迹控制验证
为了验证机器人JRT的轨迹控制能力,开展相关实验研究.实验在长×宽×高为40 cm×40 cm×40 cm的玻璃水缸中进行.仿水母推进器的驱动电流脉冲信号由信号函数发生器产生,然后由功率放大器放大后加载到电磁线圈上;重心调整机构的驱动电源为数字可编程直流电源,并使用红外遥控器对Arduino Uno R3单片机进行控制,以实现机器人JRT的重心调整.在实验过程中,由实验人员观察机器人JRT轨迹,并操控单片机来改变重心调整机构的磁铁位移,使其沿相应方向产生姿态倾斜.
图10展示了机器人JRT的轨迹控制过程:
图10
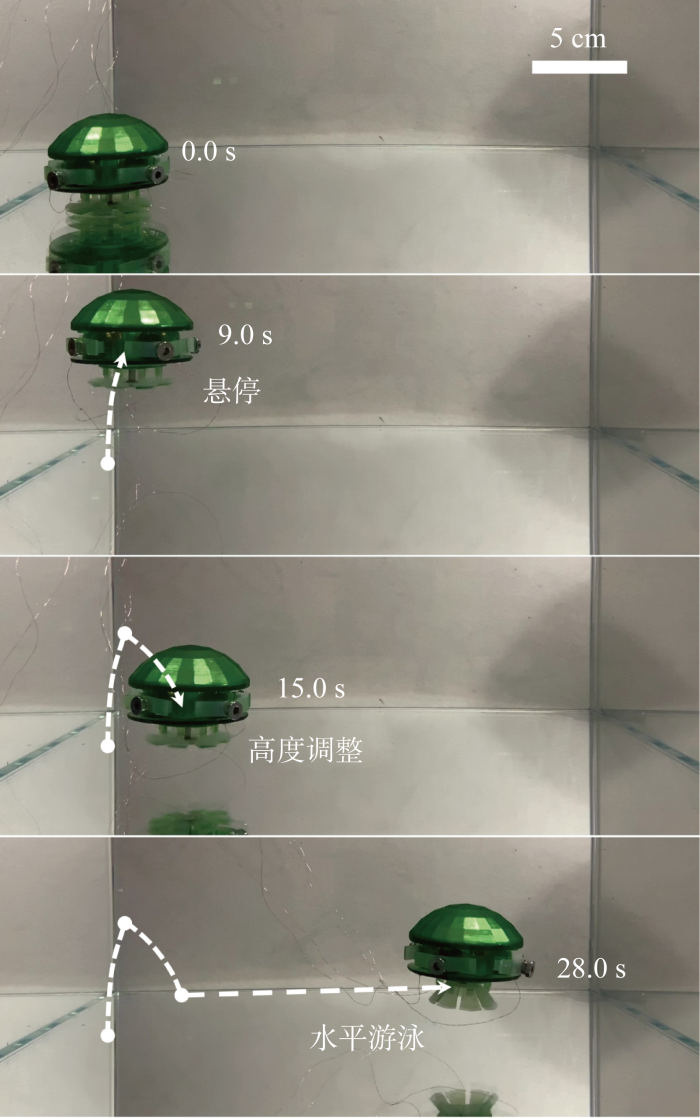
(1) 在启动后,驱动机器人JRT沿竖直方向向上游泳,对应于图10中0.0~9.0 s.
(2) 降低施加在仿水母推进器上的驱动电流IPP,使水母机器人减速为0 cm/s,然后调整驱动电流IPP使推进力
图11
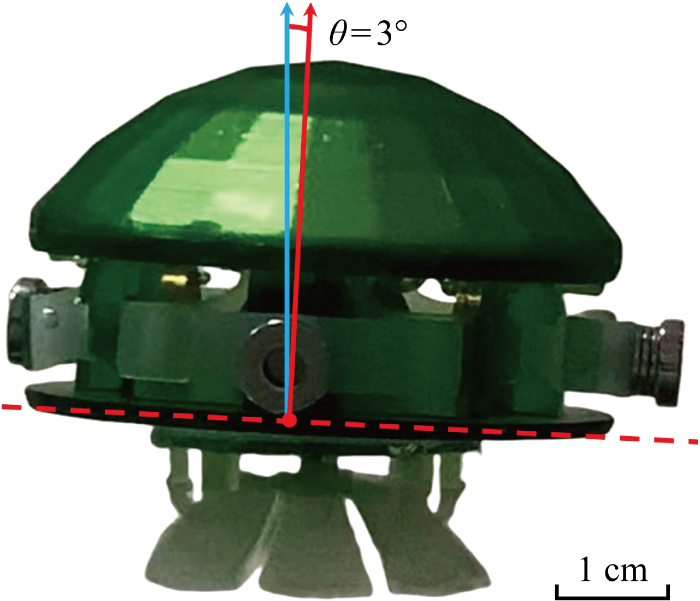
图11
机器人JRT水平定向游泳时的倾斜姿态
Fig.11
Tilted posture of JRT during horizontal directional swimming
(4) 最后,水母机器人在水平分力FH的作用下沿水平方向做定向游泳,对应于图10中15.0~28.0 s.
通过上述过程实现了机器人JRT在水中的悬停、高度控制以及水平定向游泳控制.由此,可以结合重心调整机构的四组电磁驱动装置,实现机器人JRT在水下三维空间内的任意轨迹控制.机器人JRT还具有水平方向的电磁弹射功能.当其靠近于水缸壁时,驱动在水缸壁一侧的电磁驱动装置后,磁铁在向外移动瞬间将与水缸壁产生相互作用.这可对机器人JRT产生反冲力,并驱动其快速游离水缸壁.这一弹射过程使机器人JRT拥有了一定的机动能力.
此外,在控制重心调整机构的磁铁产生5 mm偏移时,机器人JRT的倾斜角度为3°.结合式(2)可以计算得到机器人JRT的稳心高度h≈6.3 mm.理论上通过调整施加在电磁线圈上的电流大小可以改变磁铁位移量Δxg,并以此改变机器人JRT的倾斜角度θ.但是,由于重心调整机构自身结构的限制,导致磁铁的最大位移量很小,尚未实现倾斜角的定量控制.所以,目前只能使机器人JRT倾斜3°.
3.2 轨迹控制效果
图12为机器人JRT水平定向游泳俯视图.图中:不同时刻表示为Ti;bi是Ti时刻机器人JRT边缘到白色剪头的距离;机器人JRT垂直于白色箭头游泳的距离表示为di=bi-b0,亦为机器人JRT沿白色箭头定向游泳的轨迹偏差,b0为初始时刻机器人JRT边缘到白色剪头的距离.值得注意的是,当利用电磁驱动重心调整机构的其中一个电磁驱动装置使机器人JRT产生倾斜时,由于水流的作用,机器人JRT会产生自旋,这将改变机器人JRT的水平游泳方向,所以需要根据实际情况对其倾斜方向进行调整.
图12
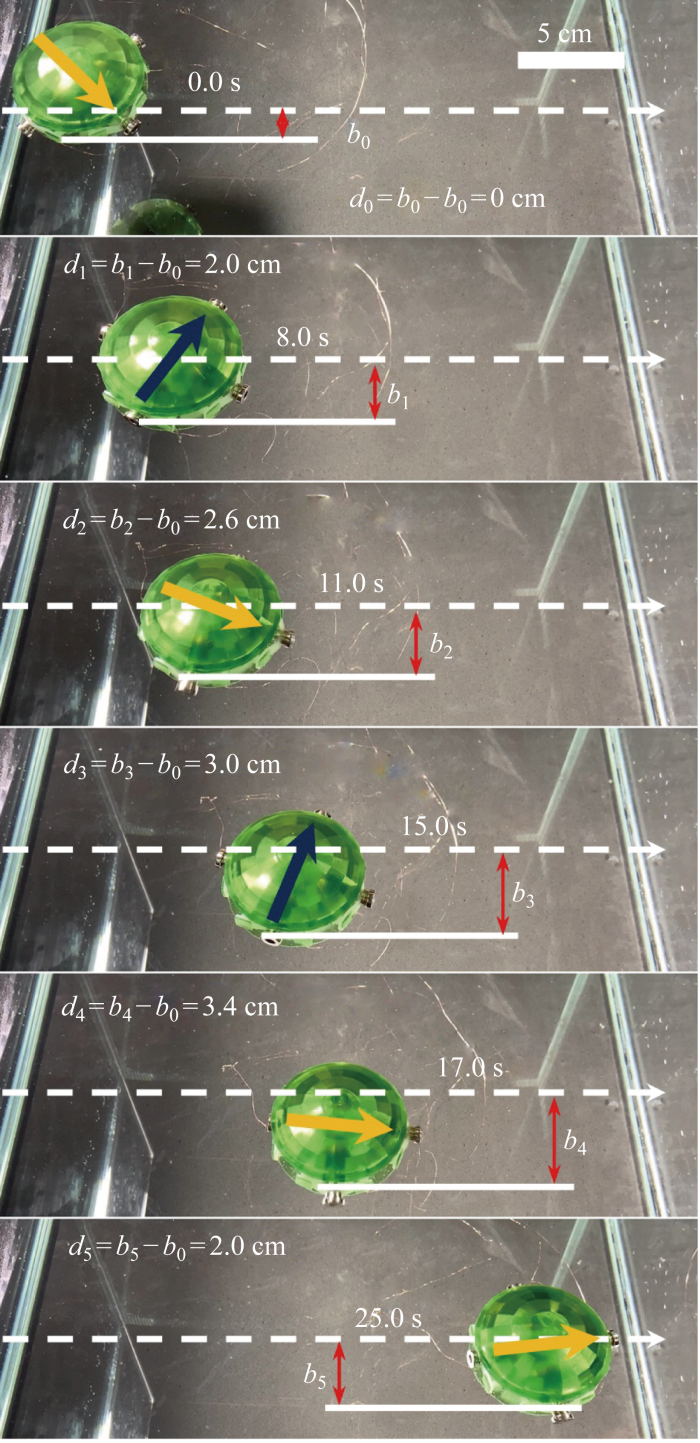
表1 机器人JRT水平定向游泳的速度和轨迹误差
Tab.1
| Ti/s | Pi/cm | uHi/(cm·s-1) | di/cm |
|---|---|---|---|
| 0.0 | 0.0 | — | — |
| 8.0 | 4.1 | 0.51 | 2.0 |
| 11.0 | 6.1 | 0.67 | 2.6 |
| 15.0 | 8.0 | 0.98 | 3.0 |
| 17.0 | 10.2 | 1.10 | 3.4 |
| 25.0 | 19.8 | 1.20 | 2.0 |
3.3 水平游泳速度分析
由图12得到了不同时刻的机器人JRT所处的位置Pi计算得到了不同时刻区间机器人JRT的水平游泳速度uHi,计算公式为
式中:T为水平定向游泳时间.由式(11)可知,当游泳时间足够大时,水母机器人JRT将以1.7 cm/s的速度水平匀速游泳.
图13
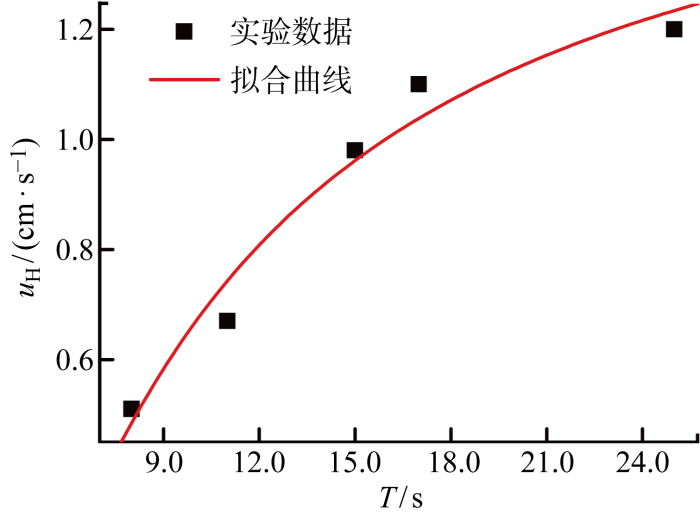
图13
机器人JRT在不同时刻的水平定向游泳速度
Fig.13
Horizontal directional swimming speed of JRT at different times
前文指出机器人JRT水平游泳时推进力沿竖直方向的分力FV=41.2 mN.另外,可以由图11得到机器人JRT沿水平方向游泳时的倾斜角θ=3°.由此,计算得到推进力沿水平方向的分力FH=FVtan θ=2.16 mN.这也是机器人JRT沿水平方向匀速运动状态下受到的阻力,即DH=-2.16 mN.进而,由式(5)可以得到水母机器人JRT的阻力系数:
结果为c≈0.50.
4 结论
本文研制了一种轨迹可控的微型水母机器人JRT.它由气室、重心调整机构和仿水母推进器三部分组成,尺寸为⌀6.8 cm×5.3 cm.基于运动状态分析提出了机器人JRT的轨迹控制方案:
(1) 不利用重心调整机构使机器人JRT姿态产生倾斜,通过控制仿水母推进器的驱动电流大小,可使机器人JRT沿竖直方向游泳或悬停.
(2) 利用重心调整机构使机器人JRT姿态产生倾斜,仿水母推进器的推进力可分解为水平和竖直方向的两个力,通过控制仿水母推进器的驱动电流大小使竖直方向的力FV=FG-FB,由此机器人JRT将在水平分力的驱动下做水平定向游泳.
本文通过实验验证了机器人JRT的上述游泳方案,其水平定向游泳的最大速度为1.72 cm/s;游泳过程中的轨迹偏差为0~3.4 cm,平均轨迹偏差为2.75 cm,具有较好的轨迹控制效果.总之,通过重心调整机构和仿水母推进器的协同控制,机器人JRT可以在水下三维空间内做任意轨迹的游泳,有望在水下资源勘查、环境监测等领域得到应用.
此外,机器人JRT还有一些需要完善之处.首先,由于重心调整机构自身结构的限制,尚未实现倾斜角的定量控制.后续将致力于重心调整机构的改进,以实现机器人JRT倾斜角度的控制.这将使机器人JRT的水平游泳速度具有可控性.其次,在后续研究中还将开发机器人JRT的控制系统,并集成相应的传感器模块,以实现自主巡航.
参考文献
Soft robots for ocean exploration and offshore operations: A perspective
[J].
DOI:10.1089/soro.2020.0011
PMID:33450174
[本文引用: 1]

The ocean and human activities related to the sea are under increasing pressure due to climate change, widespread pollution, and growth of the offshore energy sector. Data, in under-sampled regions of the ocean and in the offshore patches where the industrial expansion is taking place, are fundamental to manage successfully a sustainable development and to mitigate climate change. Existing technology cannot cope with the vast and harsh environments that need monitoring and sampling the most. The limiting factors are, among others, the spatial scales of the physical domain, the high pressure, and the strong hydrodynamic perturbations, which require vehicles with a combination of persistent autonomy, augmented efficiency, extreme robustness, and advanced control. In light of the most recent developments in soft robotics technologies, we propose that the use of soft robots may aid in addressing the challenges posed by abyssal and wave-dominated environments. Nevertheless, soft robots also allow for fast and low-cost manufacturing, presenting a new potential problem: marine pollution from ubiquitous soft sampling devices. In this study, the technological and scientific gaps are widely discussed, as they represent the driving factors for the development of soft robotics. Offshore industry supports increasing energy demand and the employment of robots on marine assets is growing. Such expansion needs to be sustained by the knowledge of the oceanic environment, where large remote areas are yet to be explored and adequately sampled. We offer our perspective on the development of sustainable soft systems, indicating the characteristics of the existing soft robots that promote underwater maneuverability, locomotion, and sampling. This perspective encourages an interdisciplinary approach to the design of aquatic soft robots and invites a discussion about the industrial and oceanographic needs that call for their application.
Self-powered soft robot in the mariana trench
[J].
基于传感探测系统的多自治水下机器人编队协调控制
[J].
DOI:10.16183/j.cnki.jsjtu.2019.05.006
[本文引用: 1]
针对自治水下机器人(AUV)编队协调控制问题,研究了基于传感探测系统的主从式编队协调控制方法.该方法能够避免AUV编队之间依靠水声通信而造成的通信延迟和数据丢失的问题,提高编队控制的可靠性以及生存能力.首先根据领航者位置信息和期望的编队队形得到跟随者的参考路径,跟随者可以实时测得领航者的距离和航向信息并与参考路径相对比.其次为了使跟随者轨迹在短时间内收敛于参考路径从而得到期望的队形,利用Lyapunov函数设计了反演控制器.最后对设计进行了编队控制的仿真.结果表明,AUV编队队形保持良好,所采用的方法具有很好的可行性.
Formation control of multiple autonomous underwater vehicles based on sensor measuring system
[J].
LM-Jelly: Liquid metal enabled biomimetic robotic jellyfish
[J].
DOI:10.1089/soro.2021.0055
PMID:35486839
[本文引用: 3]
Jellyfish have attracted worldwide attention owing to their fantastic moving styles, which also inspired development in soft robotics to meet the demands of underwater surveillance. In this study, a soft robotic jellyfish integrated liquid metal coil, and magnetic field is proposed for the first time to mimic the soft rowing propulsion of oblate jellyfish. The soft robotic jellyfish is actuated by the entirely soft electromagnetic actuators that enabled the gentle motion. Through conceptual experiments and computational fluid dynamics simulations, we systematically interpreted the mechanism of this robotic jellyfish and various factors to dominate its movement behaviors, which involve vortex formation and ascending modalities. Besides, underwater monitoring and bio-friendliness of robotic jellyfish were also demonstrated to illustrate its potential application scenarios and gentle motion characteristics. This study will help to broaden the vistas for liquid metal enabled bionic robotics in a wide range of underwater applications.
A biomimetic robotic jellyfish (Robojelly) actuated by shape memory alloy composite actuators
[J].
Fludojelly: Experimental study on jellyfish-like soft robot enabled by soft pneumatic composite (SPC)
[J].
Thrust force characterization of free-swimming soft robotic jellyfish
[J].
Untethered soft robotic jellyfish
[J].
Computational and experimental study on dynamics behavior of a bionic underwater robot with multi-flexible caudal fins
[J].
Small-scale soft robot with high speed and load capacity inspired by kangaroo hopping
[J].
Limpet II: A modular, untethered soft robot
[J].
Centimeter-scale underwater robot with high-speed inspired by jellyfish
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}