上海交通大学学报 ›› 2024, Vol. 58 ›› Issue (8): 1240-1248.doi: 10.16183/j.cnki.jsjtu.2023.135
王琦1,3, 李绿洲2, 董旭2, 袁宁一3, 丁建宁2,3( )
)
收稿日期:2023-04-17
修回日期:2023-06-26
接受日期:2023-07-31
出版日期:2024-08-28
发布日期:2024-08-27
通讯作者:
丁建宁,教授,博士生导师,电话(Tel.):0514-87978311;E-mail:作者简介:王 琦(1988-),讲师,现主要从事微型机器人研究.
基金资助:
WANG Qi1,3, LI Lüzhou2, DONG Xu2, YUAN Ningyi3, DING Jianning2,3()
Received:2023-04-17
Revised:2023-06-26
Accepted:2023-07-31
Online:2024-08-28
Published:2024-08-27
摘要:
为解决微型机器人在较小机身尺寸下实现高效轨迹控制的难题,设计并研制了微型仿水母机器人JRT,其由气室、重心调整机构和仿水母推进器三部分组成,尺寸仅为⌀6.8 cm×5.3 cm,可通过重心调整机构和仿水母推进器协同控制有效实现水下轨迹可控.水下实验验证了机器人JRT沿竖直方向游泳和悬停、水平定向游泳以及水平弹射功能,并通过对机器人JRT沿竖直方向和水平方向游泳过程中的力平衡关系和运动状态数据分析提出了轨迹控制方案,测得水平定向游泳的速度可达到1.7 cm/s,轨迹偏差为0~3.4 cm,展现了微型仿水母机器人JRT较好的轨迹控制能力,可见其在水下资源勘查、环境监测等领域的应用潜力.
中图分类号:
王琦, 李绿洲, 董旭, 袁宁一, 丁建宁. 轨迹可控的微型水母机器人研制[J]. 上海交通大学学报, 2024, 58(8): 1240-1248.
WANG Qi, LI Lüzhou, DONG Xu, YUAN Ningyi, DING Jianning. Development of a Small Jellyfish Robot with Controllable Trajectory[J]. Journal of Shanghai Jiao Tong University, 2024, 58(8): 1240-1248.
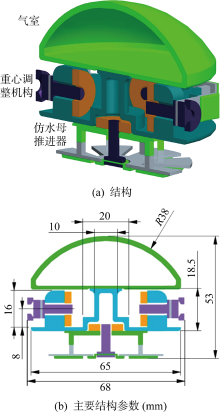
图1
机器人JRT结构示意图
图2
机器人JRT实物图
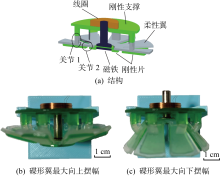
图3
仿水母推进器
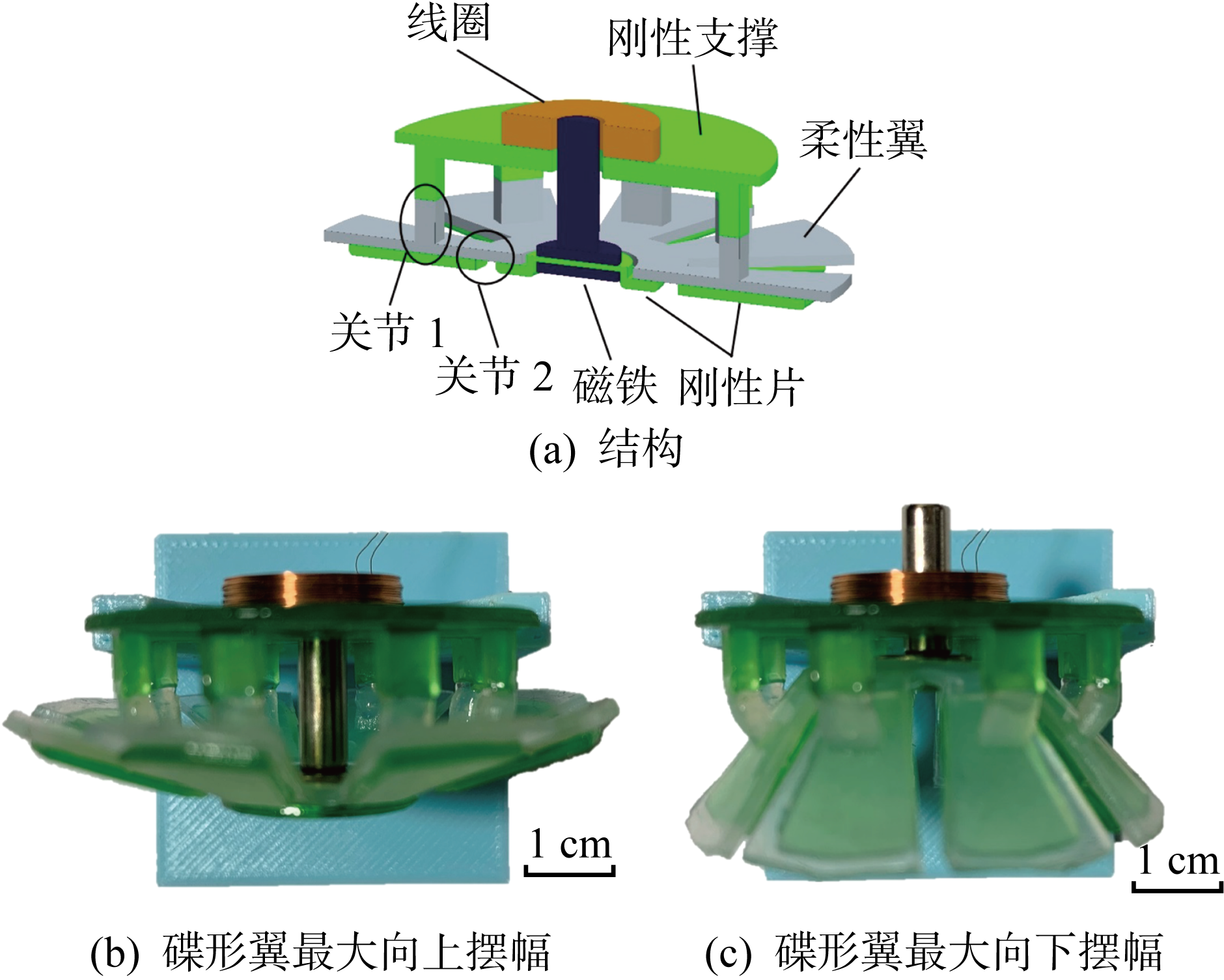
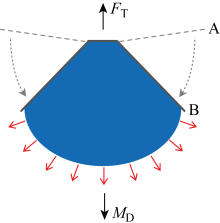
图4
仿水母推进器的推力产生原理
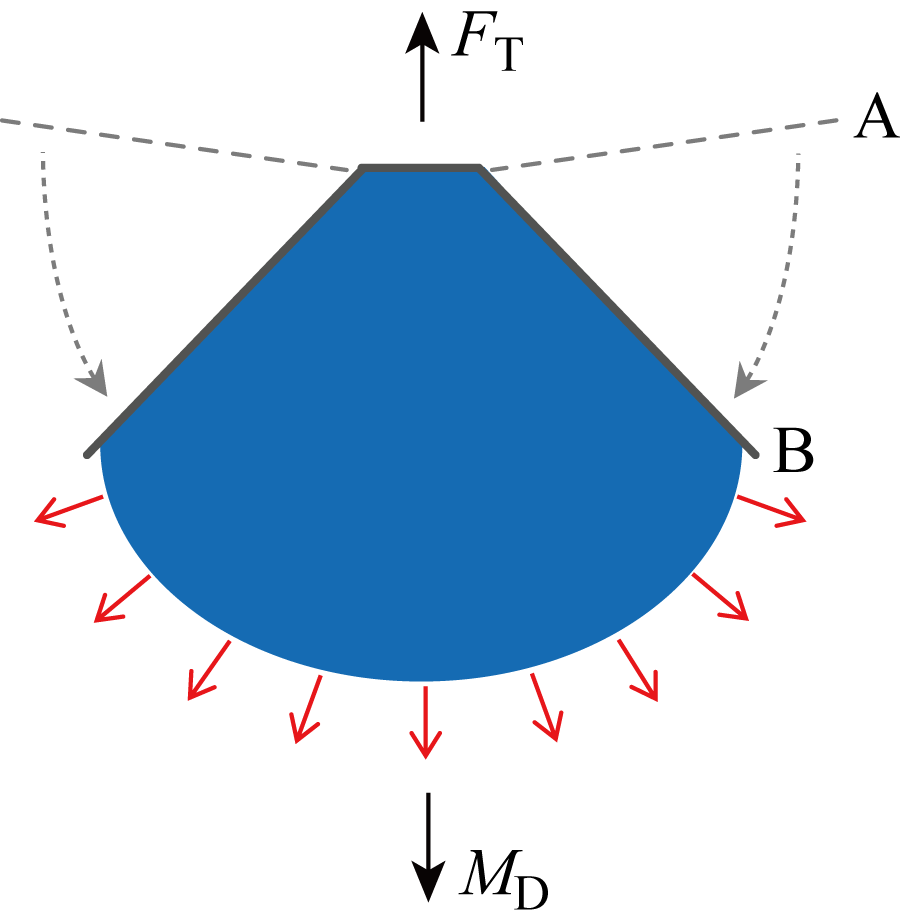
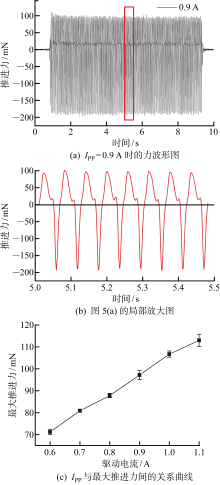
图5
推进力测试
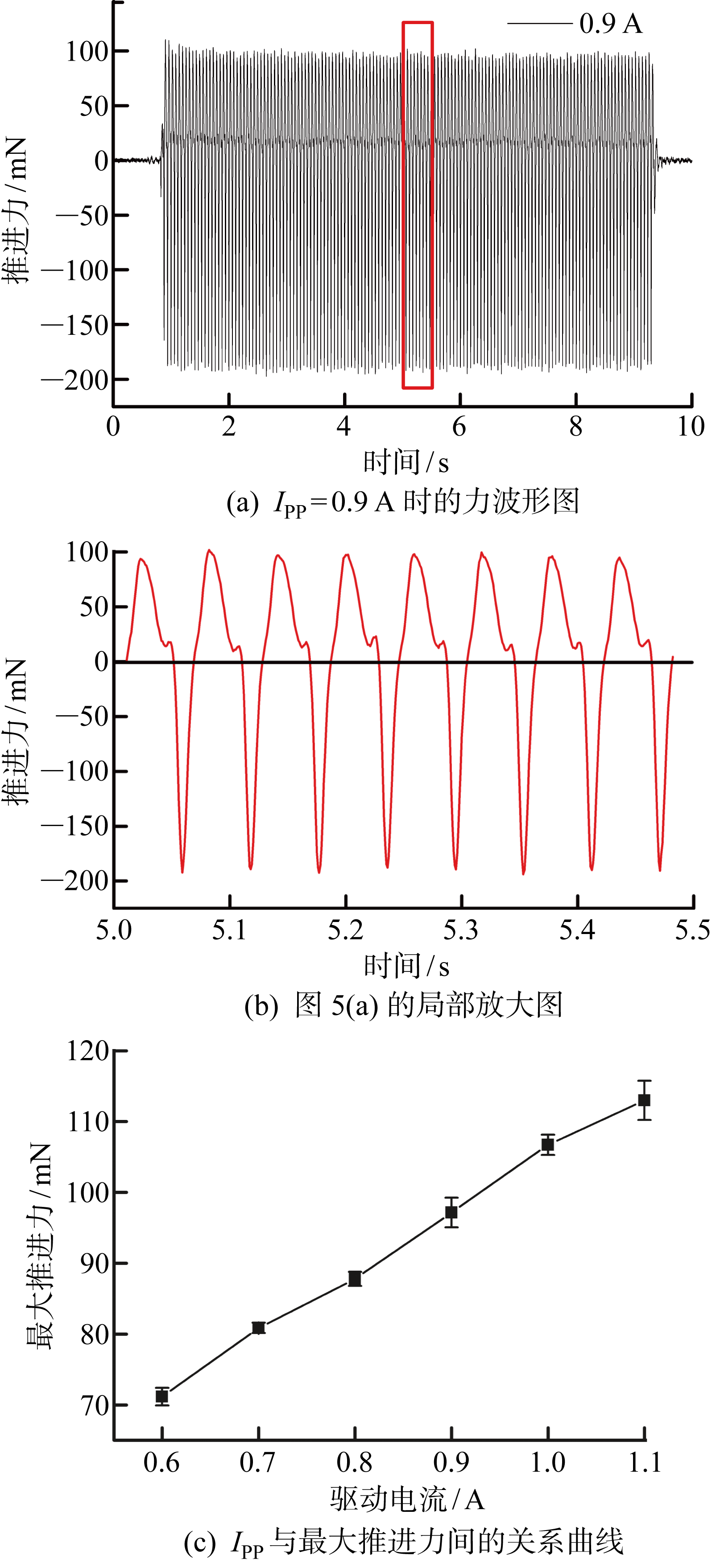
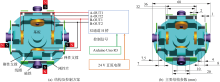
图6
重心调整机构
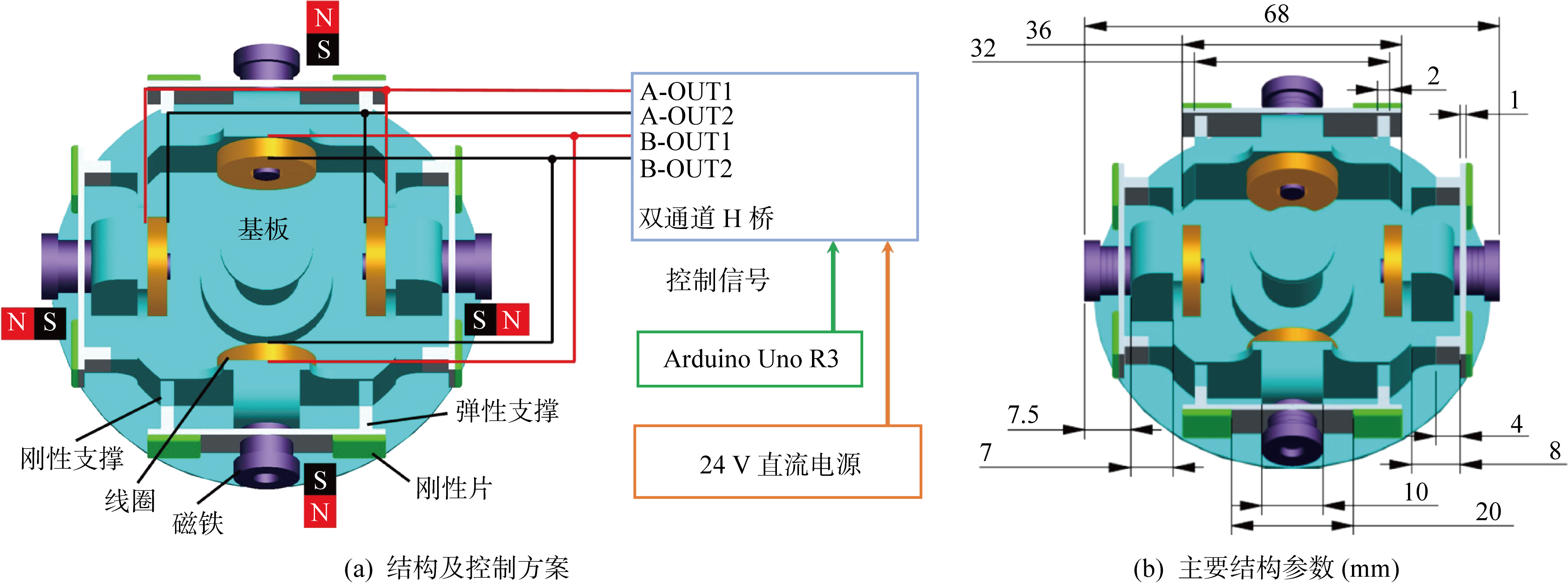
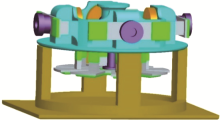
图7
重心调整机构验证实验方法
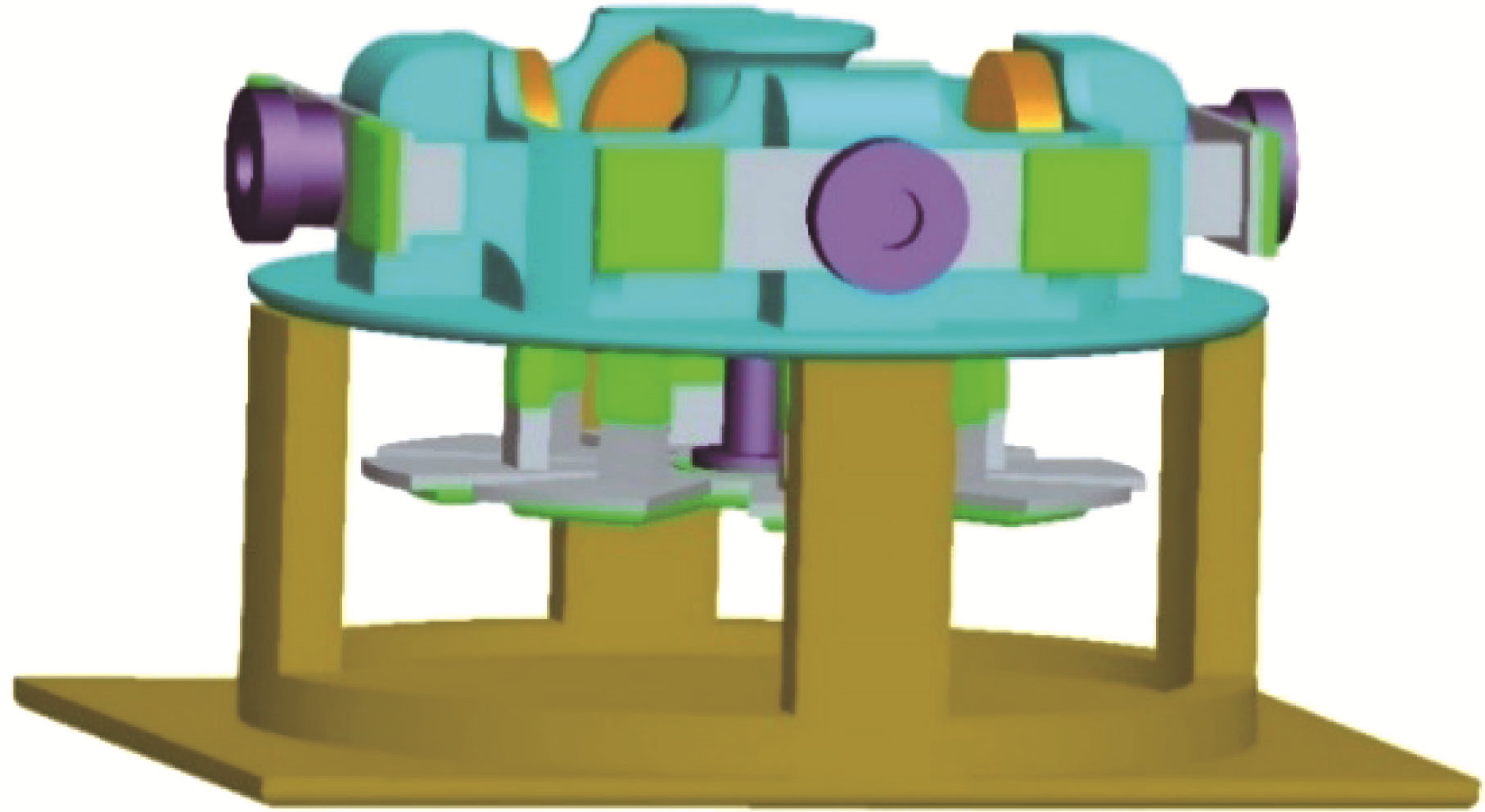
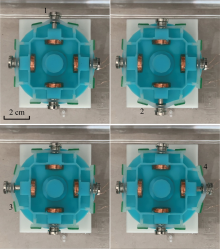
图8
重心调整机构的控制实现
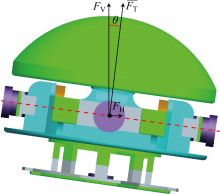
图9
机器人JRT水平游泳状态受力分析
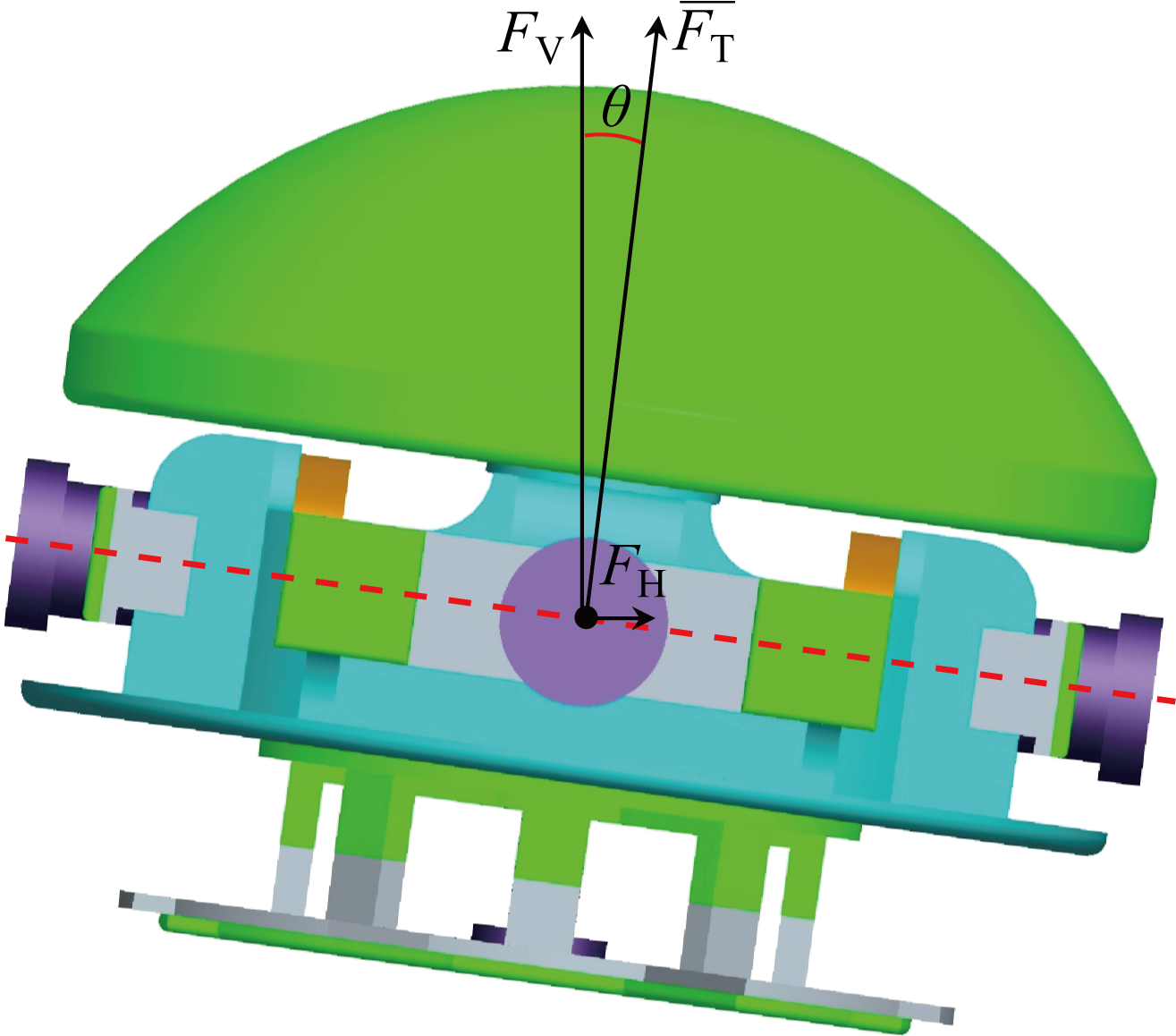
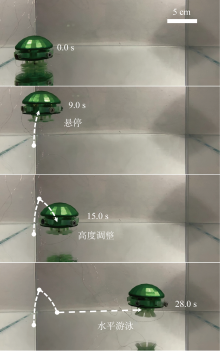
图10
机器人JRT的轨迹控制实验

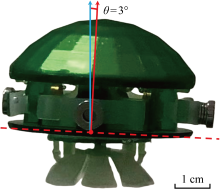
图11
机器人JRT水平定向游泳时的倾斜姿态
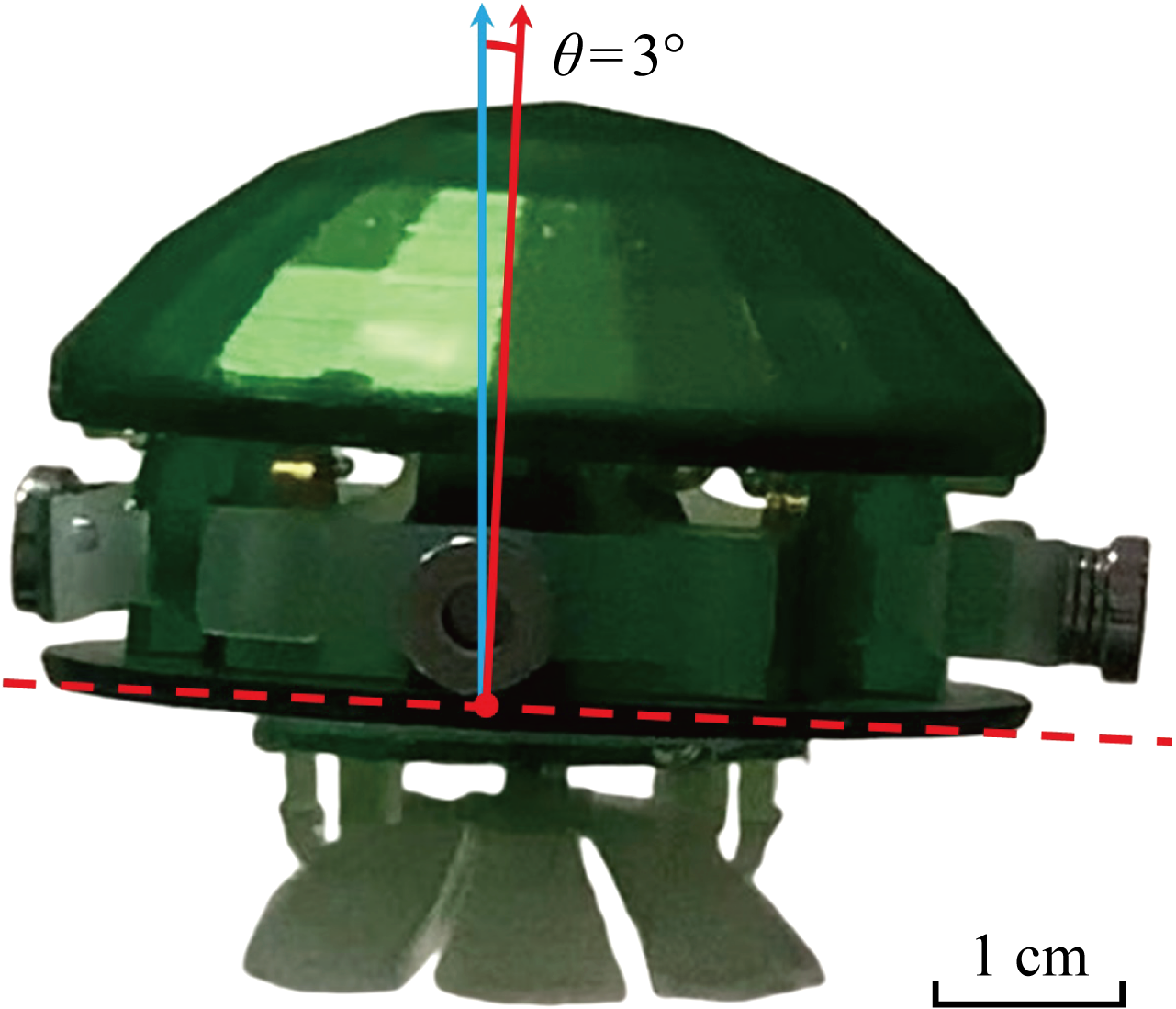
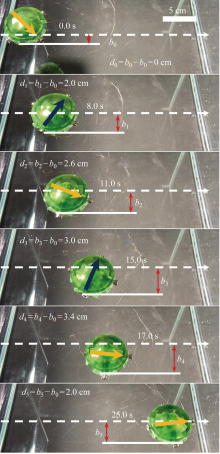
图12
机器人JRT水平定向游泳实验

表1
机器人JRT水平定向游泳的速度和轨迹误差
| Ti/s | Pi/cm | uHi/(cm·s-1) | di/cm |
|---|---|---|---|
| 0.0 | 0.0 | — | — |
| 8.0 | 4.1 | 0.51 | 2.0 |
| 11.0 | 6.1 | 0.67 | 2.6 |
| 15.0 | 8.0 | 0.98 | 3.0 |
| 17.0 | 10.2 | 1.10 | 3.4 |
| 25.0 | 19.8 | 1.20 | 2.0 |
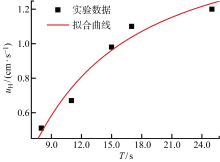
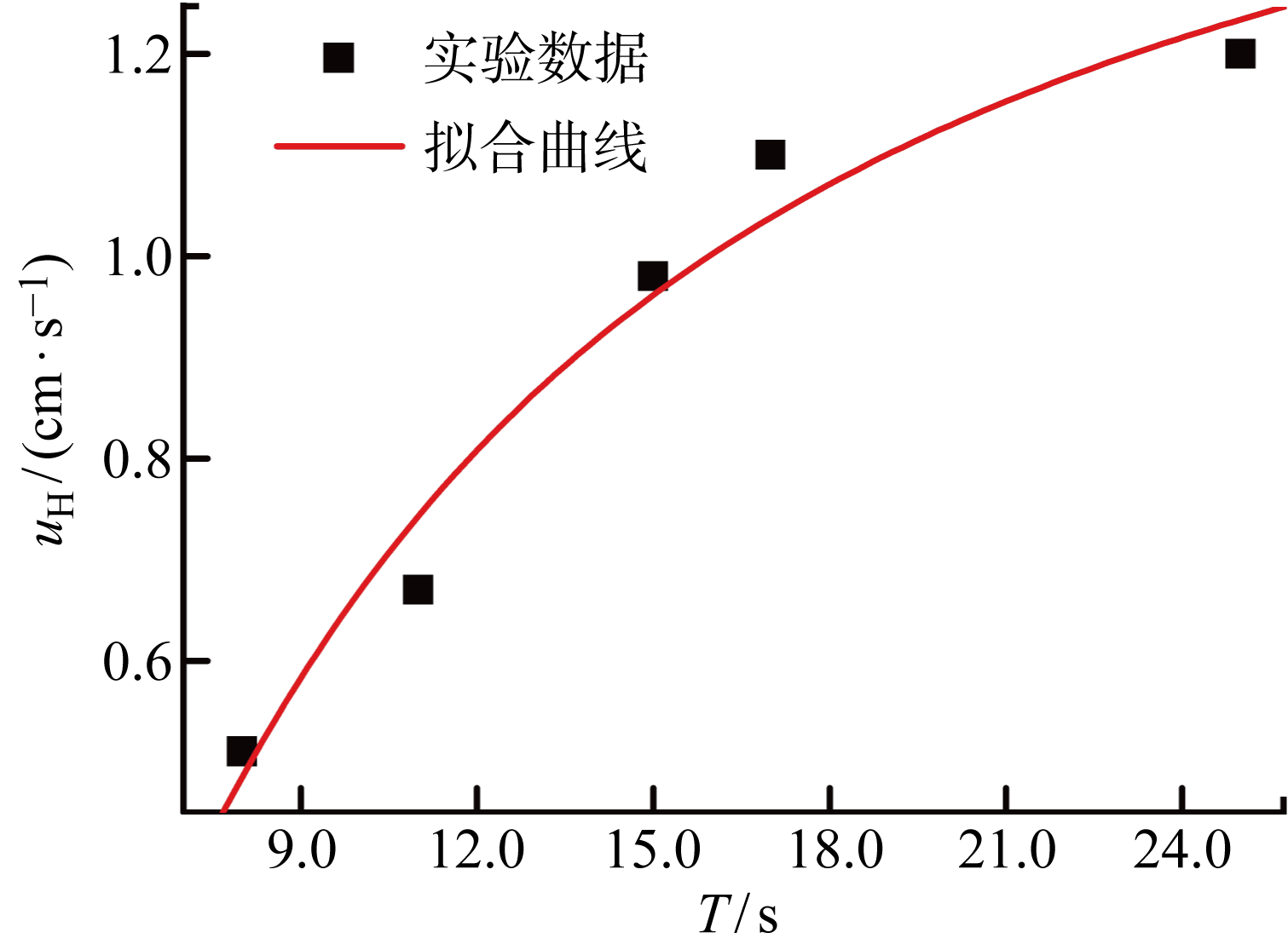
图13
机器人JRT在不同时刻的水平定向游泳速度
| [1] |
ARACRI S, GIORGIO-SERCHI F, SUARIA G, et al. Soft robots for ocean exploration and offshore operations: A perspective[J]. Soft Robotics, 2021, 8(6): 625-639.
doi: 10.1089/soro.2020.0011 pmid: 33450174 |
| [2] | LI G R, CHEN X P, ZHOU F H, et al. Self-powered soft robot in the mariana trench[J]. Nature, 2021, 591: 66-71. |
| [3] |
庞师坤, 王健, 易宏, 等. 基于传感探测系统的多自治水下机器人编队协调控制[J]. 上海交通大学学报, 2019, 53(5): 549-555.
doi: 10.16183/j.cnki.jsjtu.2019.05.006 |
| PANG Shikun, WANG Jian, YI Hong, et al. Formation control of multiple autonomous underwater vehicles based on sensor measuring system[J]. Journal of Shanghai Jiao Tong University, 2019, 53(5): 549-555. | |
| [4] |
YE J, YAO Y C, GAO J Y, et al. LM-Jelly: Liquid metal enabled biomimetic robotic jellyfish[J]. Soft Robotics, 2022, 9(6): 1098-1107.
doi: 10.1089/soro.2021.0055 pmid: 35486839 |
| [5] | VILLANUEVA A, SMITH C, PRIYA S. A biomimetic robotic jellyfish (Robojelly) actuated by shape memory alloy composite actuators[J]. Bioinspiration & Biomimetics, 2011, 6(3): 036004. |
| [6] | JOSHI A, KULKARNI A, TADESSE Y. Fludojelly: Experimental study on jellyfish-like soft robot enabled by soft pneumatic composite (SPC)[J]. Robotics, 2019, 8(3): 56. |
| [7] | FRAME J, LOPEZ N, CURET O, et al. Thrust force characterization of free-swimming soft robotic jellyfish[J]. Bioinspiration & Biomimetics, 2018, 13(6): 064001. |
| [8] | CHENG T Y, LI G R, LIANG Y M, et al. Untethered soft robotic jellyfish[J]. Smart Materials and Structures, 2019, 28(1): 015019. |
| [9] | XIE O, LI B Q, YAN Q. Computational and experimental study on dynamics behavior of a bionic underwater robot with multi-flexible caudal fins[J]. Industrial Robot, 2018, 45: 267-274. |
| [10] | WANG Q, LU X L, YUAN N Y, et al. Small-scale soft robot with high speed and load capacity inspired by kangaroo hopping[J]. Advanced Intelligent Systems, 2022, 4(1): 2100129. |
| [11] | SAYED M E, ROBERTS J O, MCKENZIE R M, et al. Limpet II: A modular, untethered soft robot[J]. Soft Robotics, 2021, 8(3): 319-339. |
| [12] | WANG Q, LU X L, YUAN N Y, et al. Centimeter-scale underwater robot with high-speed inspired by jellyfish[J]. IEEE Robotics and Automation Letters, 2023, 8(5): 2976-2982. |
| [13] | 苏浩. 微小型水下机器人模块化技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2011. |
| SU Hao. Research on the modularization technology for mini underwear vehicle[D]. Harbin:Harbin Engineering University, 2011. |
| [1] | 赵威, 袁绍珂, 李忆楠, 费燕琼. 仿人表情机器人的下颌机构设计与运动[J]. 上海交通大学学报, 2024, 58(8): 1231-1239. |
| [2] | 丁显廷. 单细胞生命体的系统工作原理是什么?[J]. 上海交通大学学报, 2021, 55(Sup.1): 14-15. |
| [3] | 王江北,方晔阳,童歆,张帅,费燕琼. 多气囊仿生软体机器人设计及其运动特性分析[J]. 上海交通大学学报(自然版), 2018, 52(1): 20-25. |
| [4] | 刘清友, 唐洋, 黄崇军, 黎伟. 新型游车大钩升沉补偿装置设计与运动分析[J]. 海洋工程装备与技术, 2014, 1(1): 70-75. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||