轨迹可控的微型水母机器人研制
Development of a Small Jellyfish Robot with Controllable Trajectory
轨迹可控的微型水母机器人研制 |
| 王琦, 李绿洲, 董旭, 袁宁一, 丁建宁 |
|
Development of a Small Jellyfish Robot with Controllable Trajectory |
| WANG Qi, LI Lüzhou, DONG Xu, YUAN Ningyi, DING Jianning |
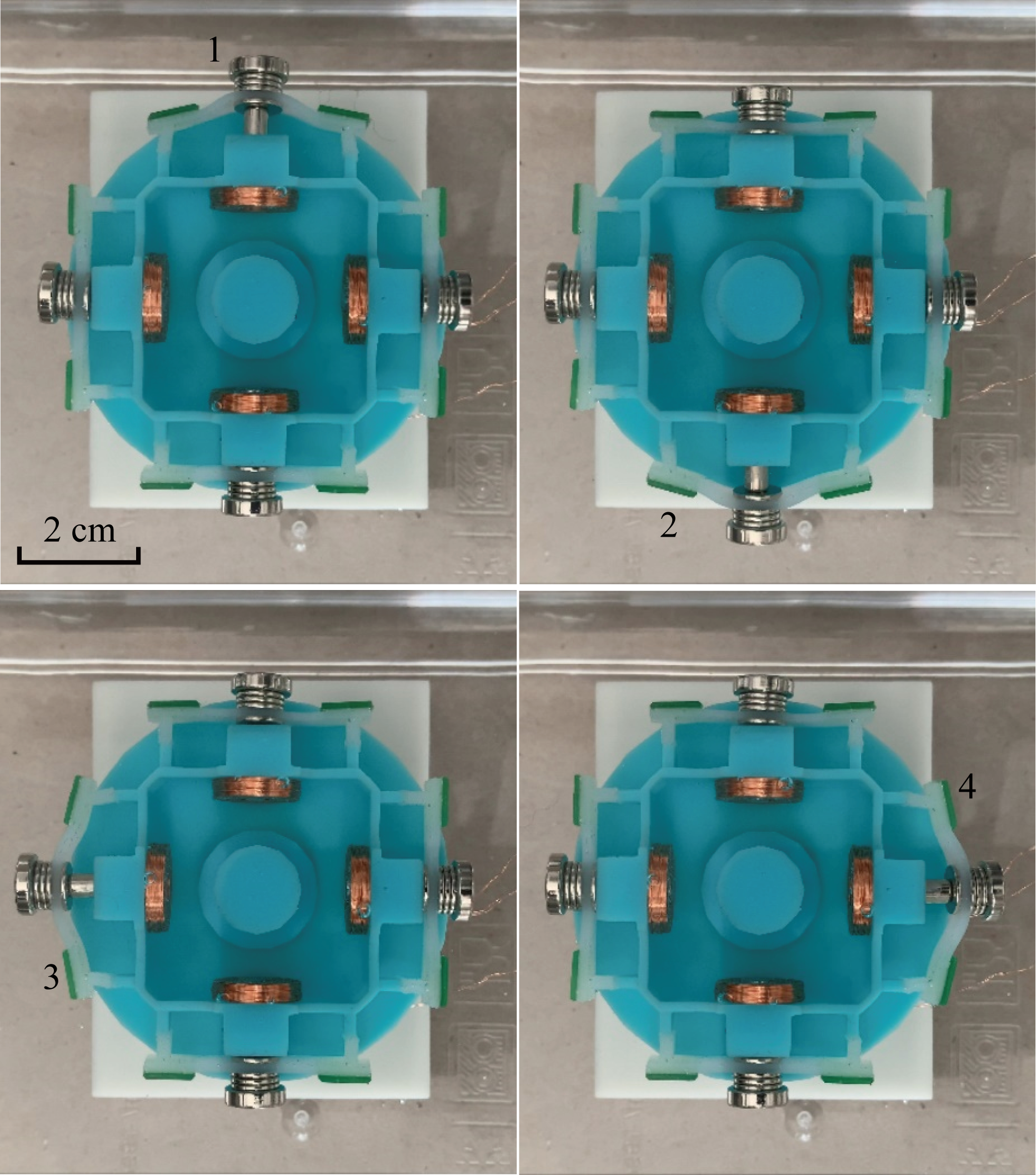
| 图8 重心调整机构的控制实现 |
| Fig.8 Control realization of center of gravity adjustment mechanism |
|
|