上海交通大学学报 ›› 2021, Vol. 55 ›› Issue (1): 40-47.doi: 10.16183/j.cnki.jsjtu.2019.104
所属专题: 《上海交通大学学报》2021年12期专题汇总专辑; 《上海交通大学学报》2021年“交通运输工程”专题
张显库( ), 韩旭
), 韩旭
收稿日期:2019-04-16
出版日期:2021-01-01
发布日期:2021-01-19
作者简介:张显库(1968-),男,辽宁省辽阳市人,教授,博士生导师,现主要从事船舶运动控制的研究.电话(Tel.): 0411-84729572;E-mail:基金资助:
ZHANG Xianku(), HAN Xu
Received:2019-04-16
Online:2021-01-01
Published:2021-01-19
摘要:
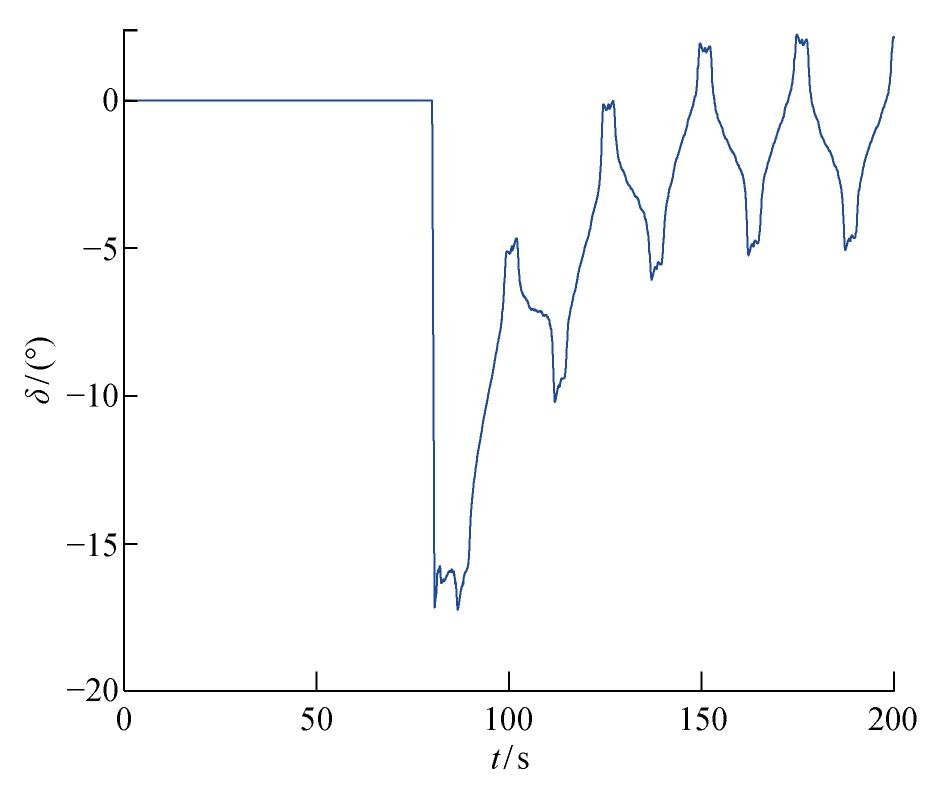
为了合理解释并控制大型油轮操纵过程中出现的船首异常摆动现象,采用驾驶员模型替代原有的比例模型,结合非线性响应型数学模型,建立了驾驶员操纵大型油轮的闭环系统数学方程,发现其与Duffing方程形似,且在一定的参数配置下系统的Lyapunov指数为正,说明可以用混沌理论解释船首异常摆动的现象.为实现航向保持的稳定控制并增强对参数不确定的鲁棒性,基于反步法提出了与模型对应的滑模控制率.仿真结果表明,当混沌艏摇处于理论最大值时,受控系统的稳态舵角仍小于5°,航向偏差小于0.07°,所设计的控制器很好地消除了混沌现象.建立人在回路中的混沌系统的思路较为新颖,借助滑模解决反步法参数不确定的方法简单而有效.
中图分类号:
张显库, 韩旭. 大型油轮艏摇混沌现象的仿真与滑模控制[J]. 上海交通大学学报, 2021, 55(1): 40-47.
ZHANG Xianku, HAN Xu. Modeling and Sliding Mode Control for Chaotic Yawing Phenomenon of Large Oil Tanker[J]. Journal of Shanghai Jiao Tong University, 2021, 55(1): 40-47.
表1
大型油轮Davis Sea的船舶参数
| 参数 | 取值 | 参数 | 取值 |
|---|---|---|---|
| 两柱间长/m | 234 | 重心距中心距离/m | 8.536 |
| 船宽/m | 42 | 航速/kn | 14.8 |
| 吃水/m | 14.9 | 舵叶面积/m2 | 65.04 |
| 方形系数 | 0.817 | 排水量/m3 | 122 945 |
| K | 0.07 | T3 | 28.43 |
| T1 | 179.4 | α | 26.59 |
| T2 | 12.17 | β | 152 406.7 |
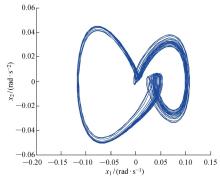
图1
系统相图
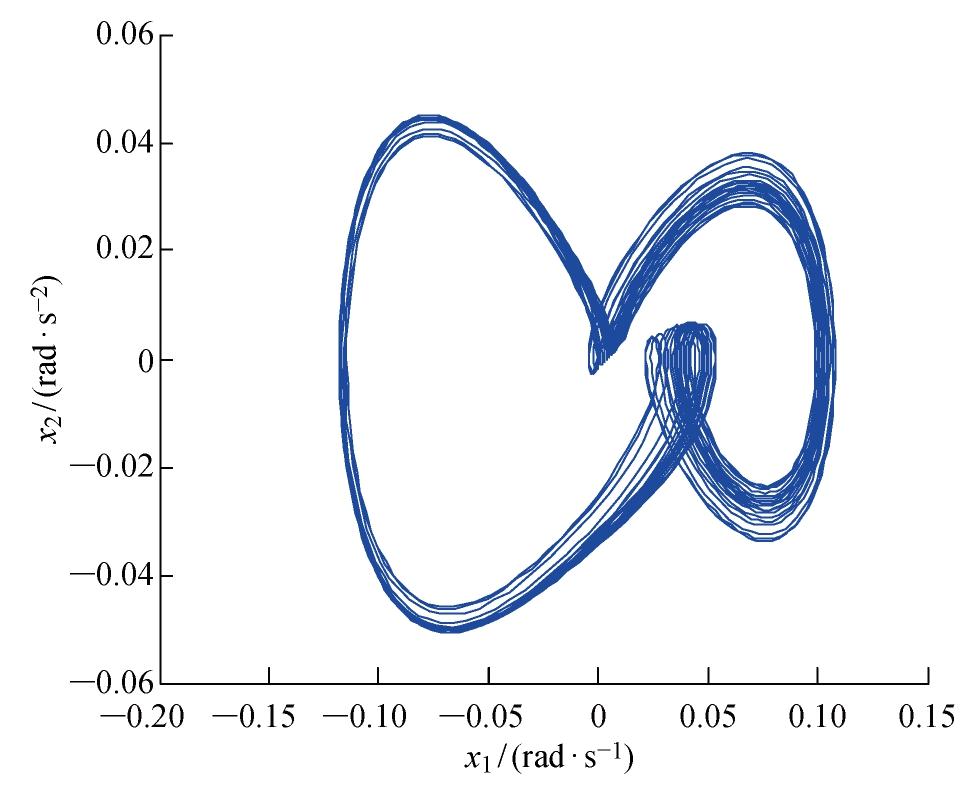

图2
B=0~2π时的系统分岔图
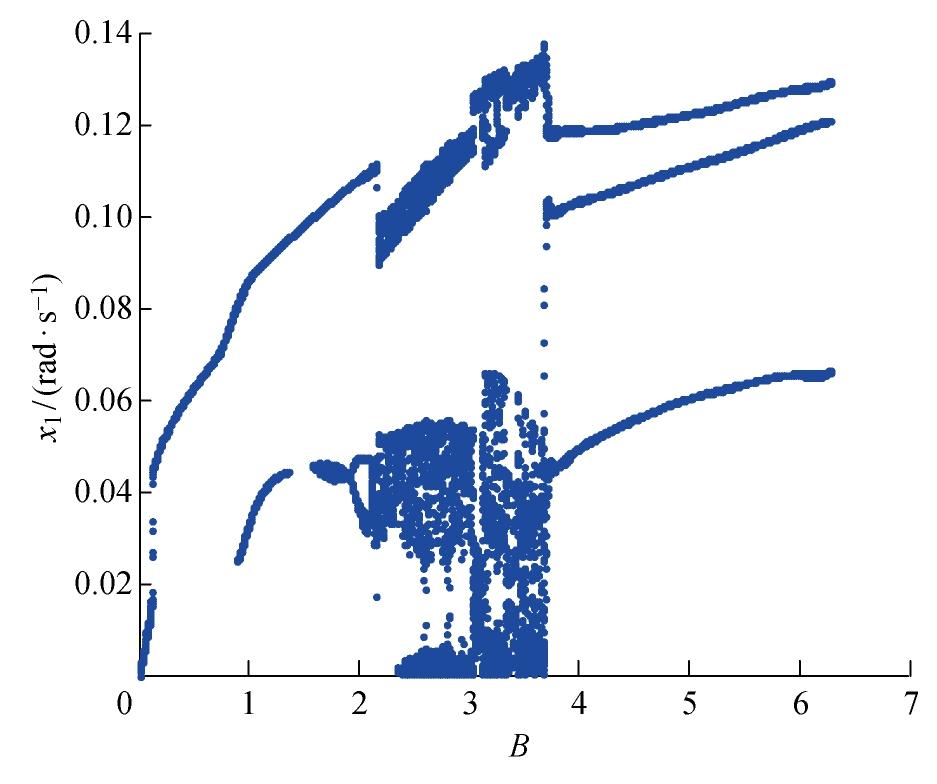
表2
三维系统Lyapunov指数与系统稳定性对应关系
| (λ1,λ2,λ3) | 系统稳定性 |
|---|---|
| (-,-,-) | 稳定不动点 |
| (0,-,-) | 极限环 |
| (0, 0,-) | 二维环面 |
| (+,+,0) | 不稳极限环 |
| (+,0, 0) | 不稳二维环面 |
| (+,0,-) | 混沌吸引子 |
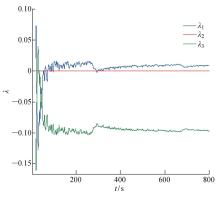
图3
系统的Lyapunov指数
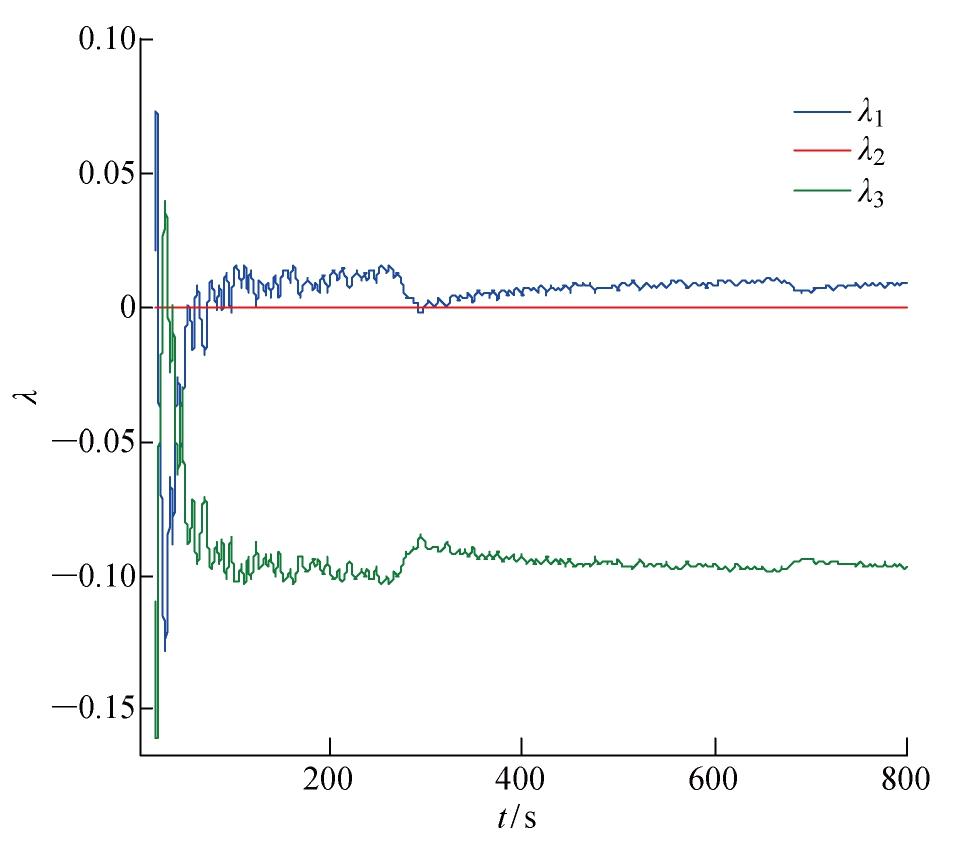
图4
系统功率谱
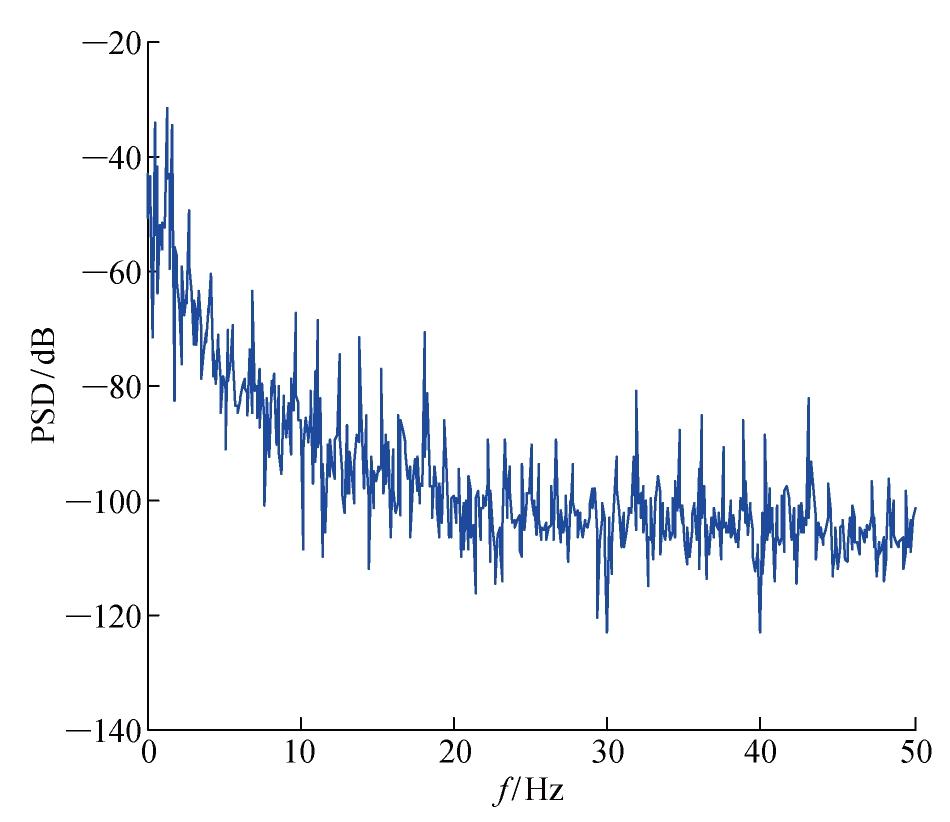
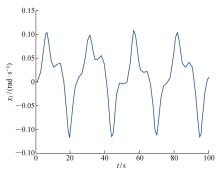
图5
状态变量x1随时间变化曲线
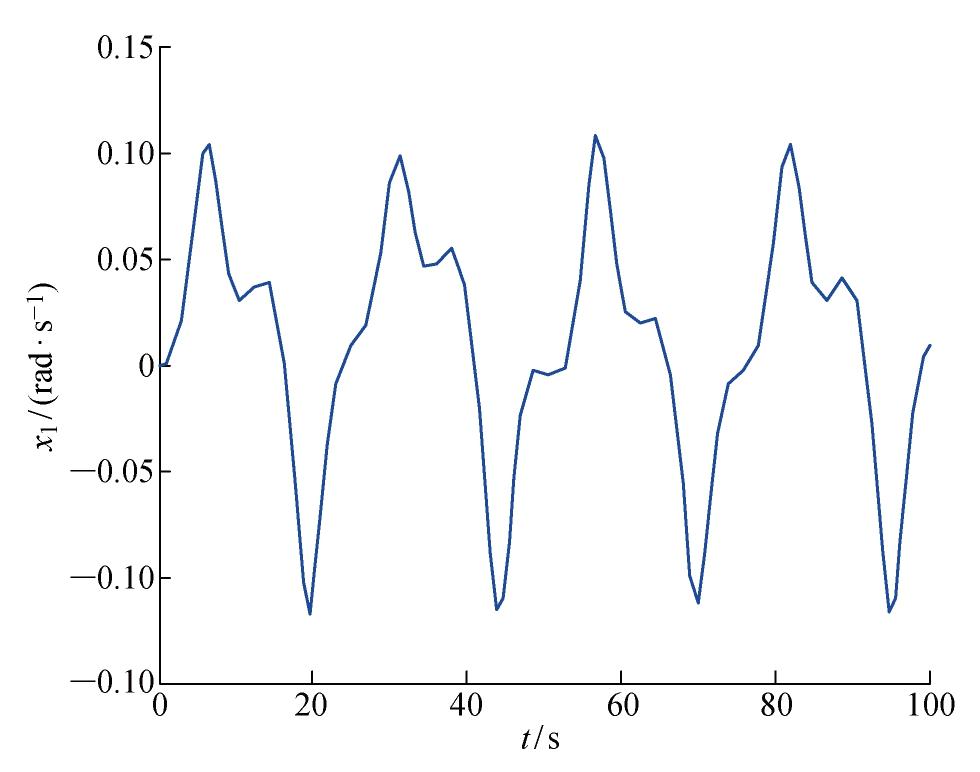
图6
不同角频率下的系统分叉图
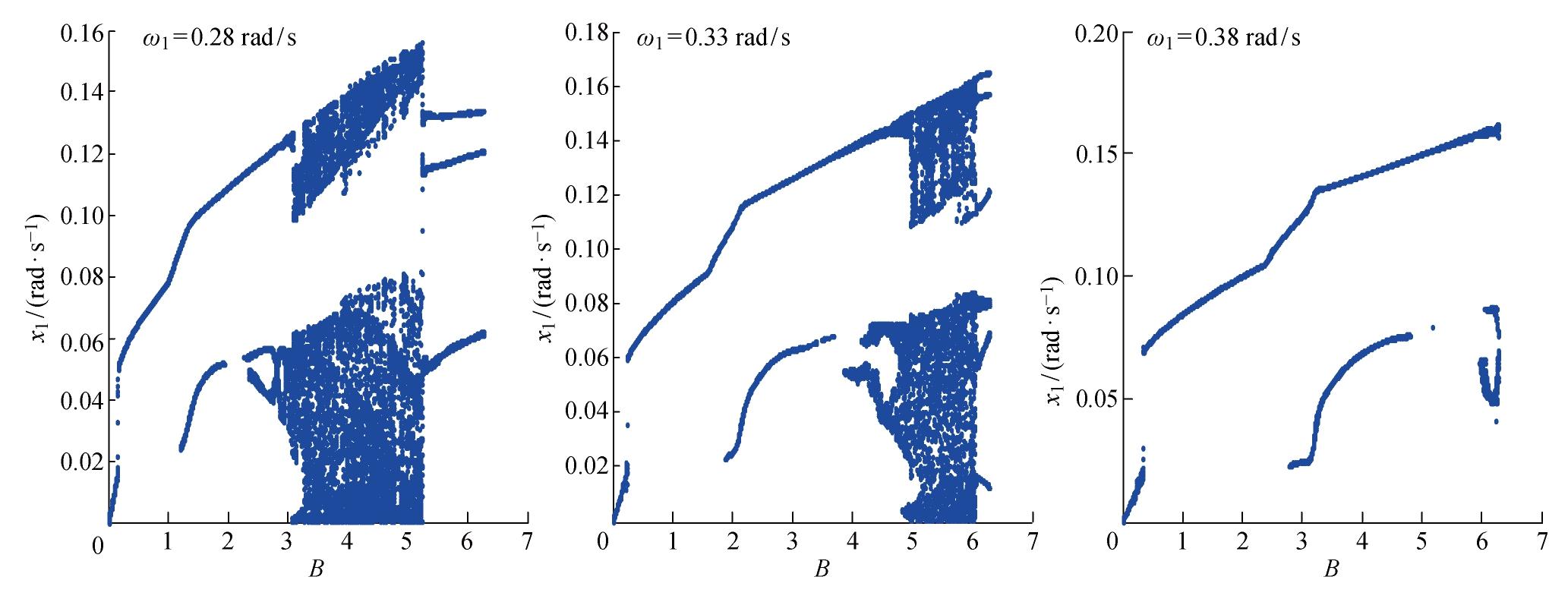
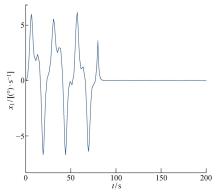
图7
控制前后转艏速率
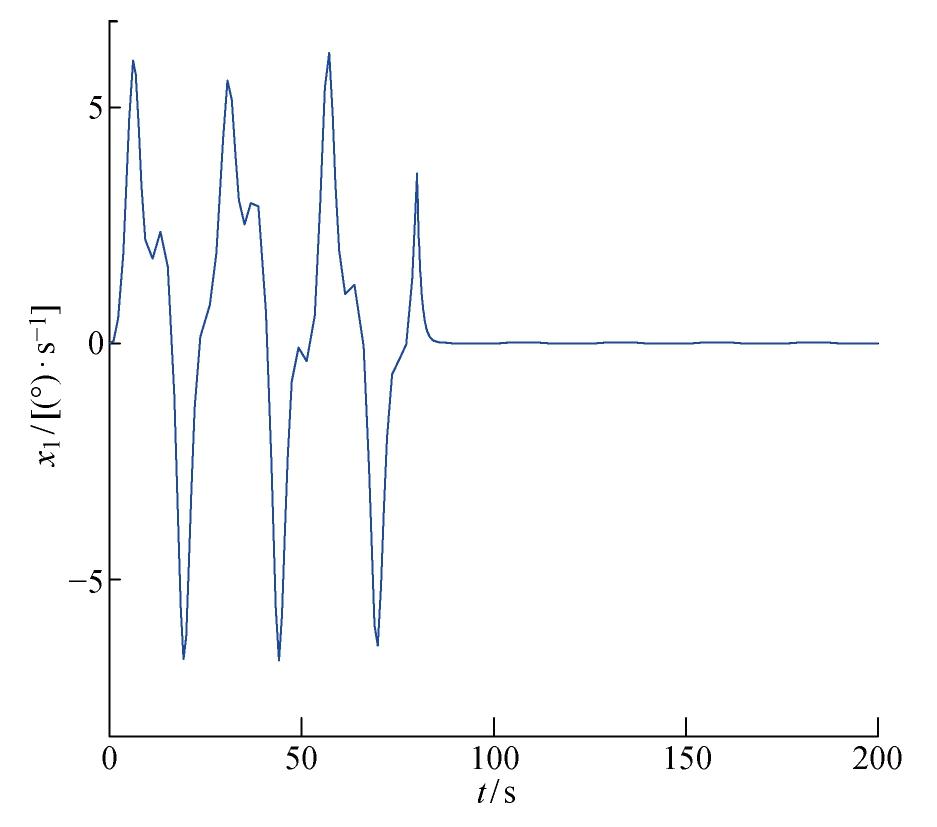
图8
控制舵角
| [1] | LIU Y, HU A, HAN F, et al. Numerical method research on nonlinear roll system of large container ship[C]∥34th International Conference on Ocean, Offshore and Arctic Engineering (ASME 2015). New York: The American Society of Mechanical Engineers, 2015: 2-22. |
| [2] | SPYROU K J, THOMPSON J M T. The nonlinear dynamics of ship motions: A field overview and some recent developments[J]. Philosophical Transactions Mathematical Physical & Engineering Sciences, 2000, 358(1771): 1735-1760. |
| [3] | SPYROU K J, THEMELIS N, KONTOLEFAS I. Nonlinear surge motions of a ship in bi-chromatic following waves[J]. Communications in Nonlinear Science & Numerical Simulations, 2018, 56: 296-313. |
| [4] | KONTOLEFAS I, SPYROU K J. Coherent structures in phase space, governing the nonlinear surge motions of ships in steep waves[J]. Ocean Engineering, 2016, 120: 339-345. |
| [5] | 苏宁.混沌学与船舶控制应用[D]. 大连: 大连海事大学,1996. |
| SU Ning. Chaos and ship motion control[D]. Dalian: Dalian Maritime University, 1996. | |
| [6] | 朱璐.船舶航向保持中的混沌及鲁棒控制[D]. 大连: 大连海事大学,2009. |
| ZHU Lu. Chaos in the course keeping control of ships and robust control method[D]. Dalian: Dalian Maritime University, 2009. | |
| [7] | 毕宁宁.参数不确定Liu混沌系统的鲁棒控制[D].大连: 大连海事大学,2009. |
| BI Ningning. Robust control of parameter uncertain Liu chaotic system[D]. Dalian: Dalian Maritime University, 2009. | |
| [8] | 于黎明,王占林,裘丽华.人机控制与驾驶员模型研究[J]. 电光与控制,2000(1): 1-8. |
| YU Liming, WANG Zhanlin, QIU Lihua. The study on pilot/flight control system and pilot model[J]. Electronics Optics & Control, 2000(1): 1-8. | |
| [9] | 蒋维安. 多维比例微分非线性飞行员模型及仿真应用[J]. 系统仿真学报,2018, 30(10): 100-107. |
| JIANG Weian. Multi-dimension proportion-differential nonlinear pilot model and simulation application[J]. Journal of System Simulation, 2018, 30(10): 100-107. | |
| [10] | YUCELEN T, YILDIZ Y, SIPAHI R, et al. Stability limit of human-in-the-loop model reference adaptive control architectures[J]. International Journal of Control, 2017, 91(10): 1-36. |
| [11] | 黄谦,李天伟,王书晓,等. 舰船混沌运动的单输入自适应变结构控制[J]. 动力学与控制学报,2015, 13(6): 443-448. |
| HUANG Qian, LI Tianwei, WANG Shuxiao, et al. Chaos control of ship steering via single input adaptive sliding mode control method[J]. Journal of Dynamics and Control, 2015, 13(6): 443-448. | |
| [12] | LI T, HUANG Q, GUO J, et al. A valid adaptive sliding mode control method for chaotic ship steering[C]∥Control & Decision Conference. New York: IEEE, 2015: 3221-3224. |
| [13] | ZHANG X, YANG G, ZHANG Q, et al. Improved concise backstepping control of course keeping for ships using nonlinear feedback technique[J]. Journal of Navigation, 2017, 70(6): 1401-1414. |
| [14] | 刘金琨. 滑模变结构控制MATLAB仿真[M]. 第3版. 北京: 清华大学出版社,2015: 4-10. |
| LIU Jinkun. Sliding mode control design and MATLAB simulation[M]. 3rd ed. Beijing: Tsinghua University Press, 2015: 4-10. | |
| [15] | 张显库,金一丞. 控制系统建模与数字仿真[M]. 第2版. 大连: 大连海事大学出版社,2013: 108-145. |
| ZHANG Xianku, JIN Yicheng. Control system modeling and digital simulation[M]. 2nd ed. Dalian: Dalian Maritime University Press, 2013: 108-145. | |
| [16] | MCCUE L S, TROESCH A W. Use of Lyapunov exponents to predict chaotic vessel motions[J]. Fluid Mechanics and Its Applications, 2011, 97: 415-432. |
| [17] | 孙克辉,谈国强,盛利元. Lyapunov指数计算算法的设计与实现[J]. 计算机工程与应用,2004, 40(35): 12-14. |
| SUN Kehui, TAN Guoqiang, SHENG Liyuan. Design and implementation of Lyapunov exponents calculating algorithm[J]. Computer Engineering and Applications, 2004, 40(35): 12-14. | |
| [18] | 闵颖颖,刘允刚. Barbalat引理及其在系统稳定性分析中的应用[J]. 山东大学学报(工学版), 2007, 37(1): 51-55. |
| MIN Yingying, LIU Yungang. Barbalat lemma and its application in analysis of system stability[J]. Journal of Shandong University (Engineering Science), 2007, 37(1): 51-55. |
| [1] | 车志远, 余海涛, 庞玉毅, 章嘉辉. 基于跟踪微分器的永磁同步电动机双时间尺度滑模控制[J]. 上海交通大学学报, 2025, 59(9): 1249-1259. |
| [2] | 黄自鑫, 于澄嵩, 汪伟, 林梦颖, 徐达. 基于等价输入干扰误差估计的欠驱动脉宽调制整流器自抗扰控制[J]. 上海交通大学学报, 2025, 59(8): 1203-1215. |
| [3] | 皇金锋, 章乾. 基于超螺旋扩张状态观测器的耦合单电感双输出Buck变换器串级滑模解耦控制[J]. 上海交通大学学报, 2025, 59(5): 592-604. |
| [4] | 林森, 文书礼, 朱淼, 戴群, 鄢伦, 赵耀, 叶惠丽. 考虑碳交易机制的海港综合能源系统电-热混合储能优化配置[J]. 上海交通大学学报, 2024, 58(9): 1344-1356. |
| [5] | 杨娜,张淑霞,白牡丹,李珊珊. 基于约瑟夫遍历和超混沌Lorenz系统的医学图像加密[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(1): 91-108. |
| [6] | 刘新宇, 王森, 曾龙, 原绍恒, 郝正航, 逯芯妍. 双馈风电场抑制电网低频振荡的自适应附加控制策略[J]. 上海交通大学学报, 2023, 57(9): 1156-1164. |
| [7] | 李梦璇, 郭建国, 许新鹏, 沈昱恒. 基于近端策略优化的制导律设计[J]. 空天防御, 2023, 6(4): 51-57. |
| [8] | 黄鹤, 高永博, 茹锋, 杨澜, 王会峰. 基于自适应黏菌算法优化的无人机三维路径规划[J]. 上海交通大学学报, 2023, 57(10): 1282-1291. |
| [9] | 刘禹铭, 赵勇, 董正建, 王平, 姬煜琦. 基于反步法的多移载工装协同作业编队控制策略[J]. 上海交通大学学报, 2023, 57(1): 103-115. |
| [10] | 王家琪, 郭建国, 郭宗易, 赵斌. 基于干扰观测器的高马赫数飞行器滑模控制[J]. 空天防御, 2021, 4(3): 85-91. |
| [11] | 吴光辉, 方东洋, 陈意芬, 李瑞, 邵翔. 基于浸入与不变流形估计器的滑模制导律研究[J]. 空天防御, 2021, 4(1): 91-96. |
| [12] | 刘邱, 赵东亚. 单输入单输出系统离散积分滑模预测控制[J]. 上海交通大学学报, 2020, 54(9): 898-903. |
| [13] | 贺宏伟, 邹早建, 曾智华. 欠驱动水面船舶的自适应神经网络-滑模路径跟随控制[J]. 上海交通大学学报, 2020, 54(9): 890-897. |
| [14] | 梅蓉. 森林环境下的无人直升机安全飞行控制[J]. 上海交通大学学报, 2020, 54(9): 994-999. |
| [15] | 夏立, 邹早建, 袁帅, 曾智华. 基于非侵入式混沌多项式法的随机阻曳流CFD模拟不确定度量化[J]. 上海交通大学学报, 2020, 54(6): 584-591. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||