上海交通大学学报 ›› 2020, Vol. 54 ›› Issue (9): 890-897.doi: 10.16183/j.cnki.jsjtu.2019.122
贺宏伟a, 邹早建a,b( ), 曾智华a
), 曾智华a
收稿日期:2019-04-26
出版日期:2020-09-28
发布日期:2020-10-10
通讯作者:
邹早建
E-mail:zjzou@sjtu.edu.cn
作者简介:贺宏伟 (1997-),男,湖南省湘潭市人,硕士生,研究方向为船舶运动控制
基金资助:
HE Hongweia, ZOU Zaojiana,b(), ZENG Zhihuaa
Received:2019-04-26
Online:2020-09-28
Published:2020-10-10
Contact:
ZOU Zaojian
E-mail:zjzou@sjtu.edu.cn
摘要:
针对欠驱动船舶的路径跟随问题,提出了一种综合神经网络和滑模控制的控制方法.采用视线(LOS)制导方法解决船舶欠驱动问题,并设计了关于漂角的自适应状态观测器,将预测的漂角引入LOS以补偿漂角引起的稳态横向偏差;使用滑模控制方法实现航向控制,并用神经网络处理控制模型的不确定性问题;应用Lyapunov理论证明了控制系统的稳定性,同时通过对比仿真试验结果,验证了本文所提出控制器的有效性.
中图分类号:
贺宏伟, 邹早建, 曾智华. 欠驱动水面船舶的自适应神经网络-滑模路径跟随控制[J]. 上海交通大学学报, 2020, 54(9): 890-897.
HE Hongwei, ZOU Zaojian, ZENG Zhihua. Adaptive NN-SM Control for Path Following of Underactuated Surface Vessels[J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 890-897.
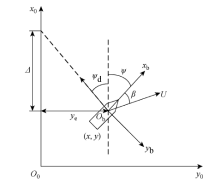
图1
LOS制导示意图
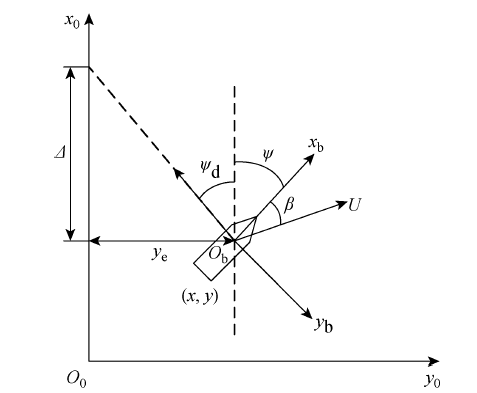
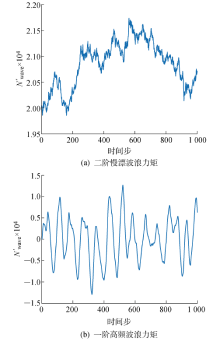
图2
无因次二阶及一阶波浪力矩3.3 数值仿真结果
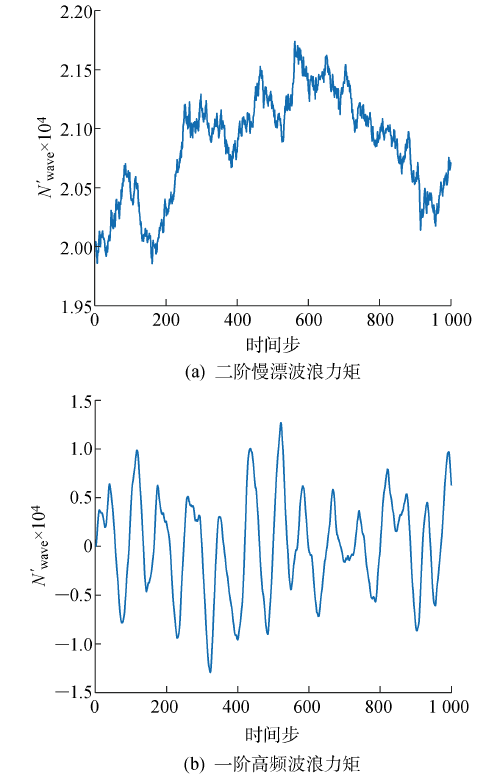

图3
航向控制仿真结果
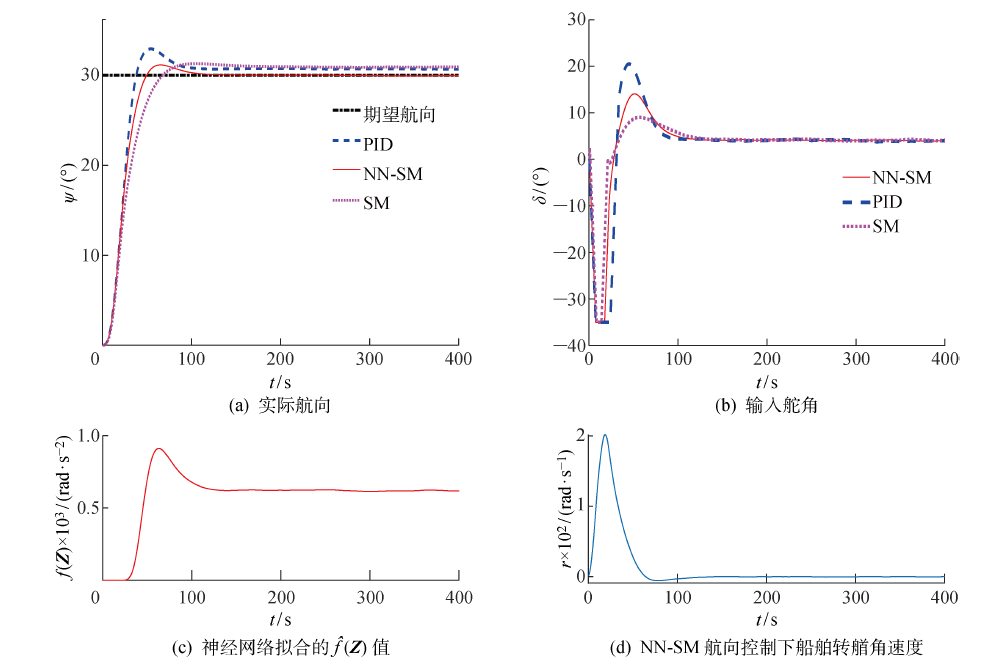
图4
二阶波浪力作用下路径跟随仿真结果
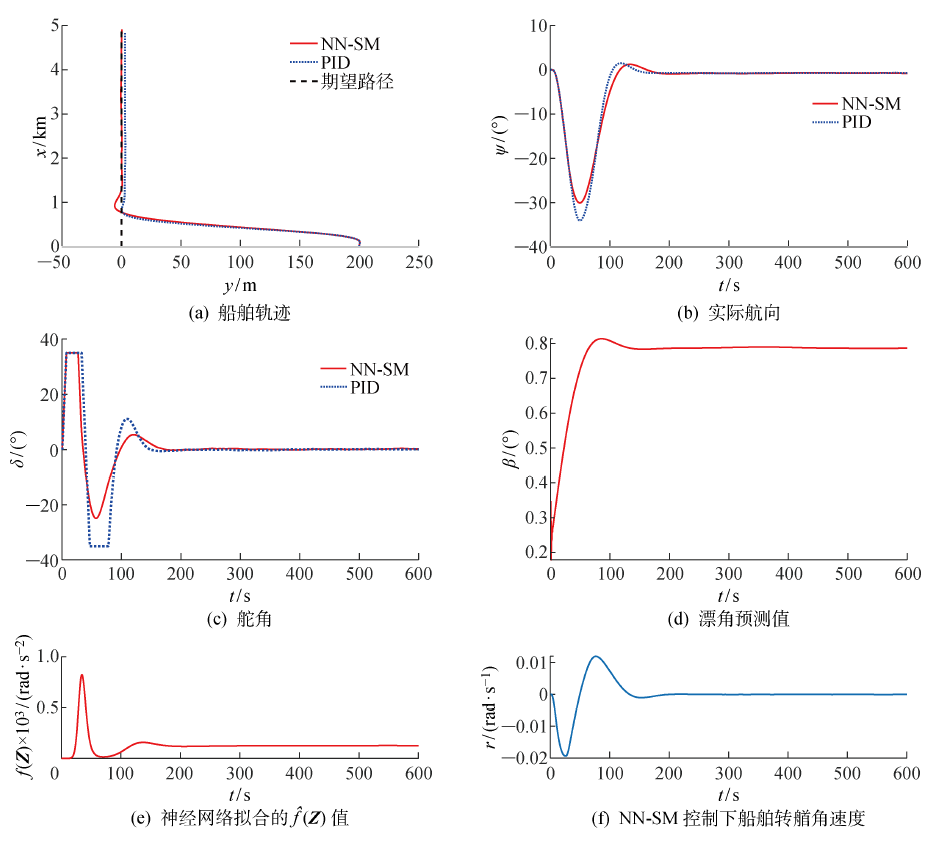
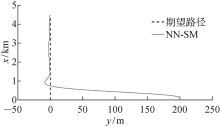
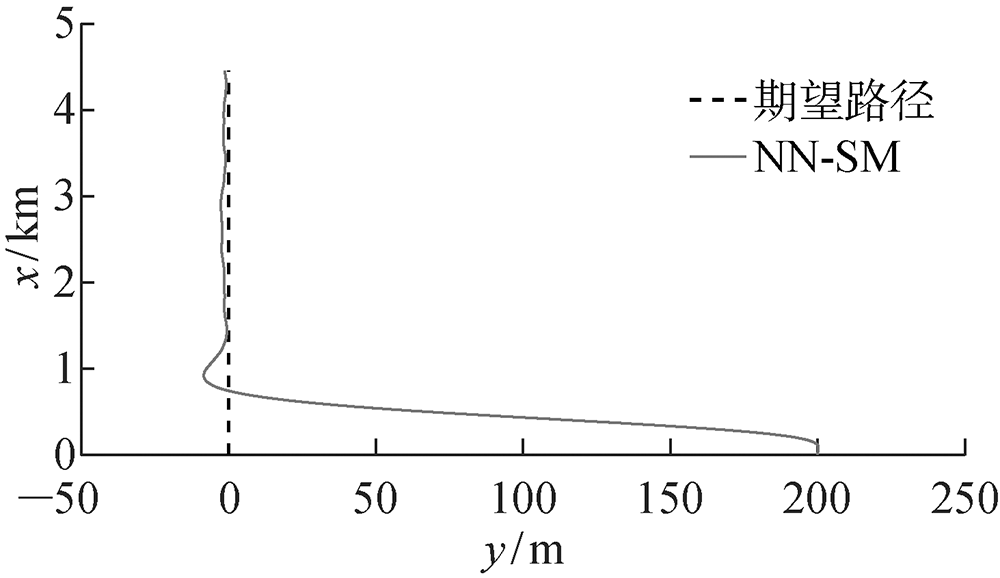
图5
一阶波浪力作用下路径跟随仿真结果
| [1] | HEALEY A J, LIENARD D. Multivariable sliding mode control for autonomous diving and steering of unmanned underwater vehicles[J]. IEEE Journal of Oceanic Engineering, 1993,18(3):327-339. |
| [2] | FREDRIKSEN E, PETTERSEN K Y. Global κ-exponential way-point maneuvering of ships: Theory and experiments[J]. Automatica, 2006,42(4):677-687. |
| [3] | FOSSEN T I, BREIVIK M, SKJETNE R. Line-of-sight path following of underactuated marine craft[J]. IFAC Proceedings Volumes, 2003,36(21):211-216. |
| [4] | LEKKAS A M, FOSSEN T I. Trajectory tracking and ocean current estimation for marine underactuated vehicles [C]//2014 IEEE Conference on Control Applications (CCA). Juan Les Antibes, France: IEEE, 2014: 905-910. |
| [5] | BORHAUG E, PAVLOV A, PETTERSEN K Y. Integral LOS control for path following of underactuated marine surface vessels in the presence of constant ocean currents [C]//IEEE Conference on Decision and Control. Cancun, Mexico: IEEE, 2008: 4984-4991. |
| [6] | KAHVECI N E, IOANNOU P A. Adaptive steering control for uncertain ship dynamics and stability ana-lysis[J]. Automatica, 2013,49(3):685-697. |
| [7] | FOSSEN T I, LEKKAS A M. Direct and indirect adaptive integral line-of-sight path-following controllers for marine craft exposed to ocean currents[J]. International Journal of Adaptive Control & Signal Processing, 2017,31(4):445-463. |
| [8] | LIU C, CHEN C P, ZOU Z, et al. Adaptive NN-DSC control design for path following of underactuated surface vessels with input saturation[J]. Neurocomputing, 2017,267:466-474. |
| [9] | 刘洋, 郭晨. 船舶航向保持RBF神经网络自适应非线性控制[J]. 大连海事大学学报, 2013,39(4):1-4. |
| LIU Yang, GUO Chen. RBF neural network based adaptive nonlinear control for ship course keeping[J]. Journal of Dalian Maritime University, 2013,39(4):1-4. | |
| [10] | 罗伟林, 邹早建, 李铁山. 基于神经网络和L2增益的船舶航向自动舵设计[J]. 中国造船, 2009,50(2):40-45. |
| LUO Weilin, ZOU Zaojian, LI Teishan. Neural-network and L2-gain based autopilot design of ship course-keeping[J]. Shipbuilding of China, 2009,50(2):40-45. | |
| [11] | 秦梓荷, 林壮, 李平, 等. 基于LOS导航的欠驱动船舶滑模控制[J]. 中南大学学报(自然科学版), 2016,47(10):3605-3611. |
| QIN Zihe, LIN Zhuang, LI Ping, et al. Sliding-mode control of underactuated ship based on LOS guidance[J]. Journal of Central South University (Science and Technology), 2016,47(10):3605-3611. | |
| [12] | FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. New York: John Wiley & Sons, 2011: 1-596. |
| [13] | 李铁山, 邹早建, 罗伟林. 基于DSC后推法的非线性系统的鲁棒自适应NN控制[J]. 自动化学报, 2008,34(11):1424-1430. |
| LI Tieshan, ZOU Zaojian, LUO Weilin. DSC-backstepping based robust adaptive NN control for nonlinear systems[J]. Acta Automatica Sinica, 2008,34(11):1424-1430. | |
| [14] | 刘程. 船舶路径跟踪与减横摇综合控制研究[D]. 上海: 上海交通大学, 2015. |
| LIU Cheng. Integrated control of path following and roll motion reduction for marine vessels[D]. Shanghai: Shanghai Jiao Tong University, 2015. | |
| [15] | FOSSEN T I. Guidance and control of ocean vehicles[M]. New York: John Wiley & Sons, 1994: 1-494. |
| [1] | 曾国治, 魏子清, 岳宝, 丁云霄, 郑春元, 翟晓强. 基于CNN-RNN组合模型的办公建筑能耗预测[J]. 上海交通大学学报, 2022, 56(9): 1256-1261. |
| [2] | 吴庶宸, 戚宗锋, 李建勋. 基于深度学习的智能全局灵敏度分析[J]. 上海交通大学学报, 2022, 56(7): 840-849. |
| [3] | 全大英, 陈赟, 唐泽雨, 李世通, 汪晓锋, 金小萍. 基于双通道卷积神经网络的雷达信号识别[J]. 上海交通大学学报, 2022, 56(7): 877-885. |
| [4] | 秦艺超, 黄礼敏, 王骁, 马学文, 段文洋, 郝伟. 基于人工神经网络的自航浮标测波方法可行性[J]. 上海交通大学学报, 2022, 56(4): 498-505. |
| [5] | 赵勇, 苏丹. 基于4种长短时记忆神经网络组合模型的畸形波预报[J]. 上海交通大学学报, 2022, 56(4): 516-522. |
| [6] | 丁明, 孟帅, 王书恒, 夏玺. 六自由度波浪补偿平台的神经网络自适应反馈线性化控制[J]. 上海交通大学学报, 2022, 56(2): 165-172. |
| [7] | 刘秀丽, 徐小力. 基于特征金字塔卷积循环神经网络的故障诊断方法[J]. 上海交通大学学报, 2022, 56(2): 182-190. |
| [8] | 聂瑞, 王红茹. 基于神经网络观测器的无人机编队执行器故障诊断[J]. 空天防御, 2022, 5(2): 32-41. |
| [9] | 王卓鑫, 赵海涛, 谢月涵, 任翰韬, 袁明清, 张博明, 陈吉安. 反向传播神经网络联合遗传算法对复合材料模量的预测[J]. 上海交通大学学报, 2022, 56(10): 1341-1348. |
| [10] | 罗睿乔. 井下节流技术在南海东部高温气田的应用[J]. 海洋工程装备与技术, 2022, 9(1): 58-66. |
| [11] | 陶海红, 闫莹菲. 一种基于GA-CNN的网络化雷达节点遴选算法[J]. 空天防御, 2022, 5(1): 1-5. |
| [12] | 戴少怀, 杨革文, 郁文, 吴向上. 基于RBF神经网络的雷达有源压制干扰识别[J]. 空天防御, 2022, 5(1): 102-107. |
| [13] | 郑德重, 杨媛媛, 黄浩哲, 谢哲, 李文涛. 基于距离置信度分数的多模态融合分类网络[J]. 上海交通大学学报, 2022, 56(1): 89-100. |
| [14] | 许凌, 王兴志, 肖林朋. 基于语义特征抓取电网调度事件的检测技术[J]. 上海交通大学学报, 2021, 55(S2): 86-91. |
| [15] | 王岩, 陈耀然, 韩兆龙, 周岱, 包艳. 基于互信息理论与递归神经网络的短期风速预测模型[J]. 上海交通大学学报, 2021, 55(9): 1080-1086. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||