上海交通大学学报 ›› 2020, Vol. 54 ›› Issue (9): 881-889.doi: 10.16183/j.cnki.jsjtu.2020.99.014
• 学报(中文) • 下一篇
董祥祥, 吕润妍, 蔡云泽( )
)
收稿日期:2020-01-06
出版日期:2020-09-28
发布日期:2020-10-10
通讯作者:
蔡云泽
E-mail:yzcai@sjtu.edu.cn
作者简介:董祥祥(1995-),女,山西省临汾市人,博士生,主要研究方向为状态估计与滤波
基金资助:
DONG Xiangxiang, LÜ Runyan, CAI Yunze*()
Received:2020-01-06
Online:2020-09-28
Published:2020-10-10
Contact:
CAI Yunze*
E-mail:yzcai@sjtu.edu.cn
摘要:
为了解决非线性滤波中量测噪声呈厚尾分布且统计特性不确定的问题,提出一种基于Pearson Type VII 分布的自适应滤波算法.针对传统鲁棒卡尔曼滤波器因尺度矩阵和自由度参数固定不变而无法自适应调整的问题,以容积卡尔曼滤波器为基础,选择Pearson Type VII 分布对厚尾噪声进行建模,将传统鲁棒滤波固定自由度参数的估计转化为Pearson Type VII 分布中可自适应调整的双自由度参数的估计,并通过 inverse Wishart和Gamma分布描述尺度矩阵、双自由度参数和辅助参数的先验分布,利用遗忘因子对各参数进行时间更新;基于变分贝叶斯理论,对系统状态、尺度矩阵、双自由度参数和辅助参数形成的联合后验概率密度函数进行变分迭代,实现对系统状态和未知厚尾噪声的联合估计.仿真结果表明,在不确定厚尾噪声条件下,本文算法的滤波精度高于传统鲁棒容积卡尔曼滤波.
中图分类号:
董祥祥, 吕润妍, 蔡云泽. 基于变分贝叶斯理论的不确定厚尾噪声滤波方法[J]. 上海交通大学学报, 2020, 54(9): 881-889.
DONG Xiangxiang, LÜ Runyan, CAI Yunze*. A Variational Bayes-Based Filter with Uncertain Heavy-Tailed Noise[J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 881-889.

图1
算法流程图

表1
平均均方根误差
| 滤波算法 | MRMSE | |||||
|---|---|---|---|---|---|---|
| sx/m | vx/(m·s-1) | sy/m | vy/(m·s-1) | ω/[(°)·s-1] | ||
| Robust CKF | 43.4444 | 16.8042 | 36.5075 | 15.0647 | 0.0283 | |
| VBCKF Pearson | 33.7801 | 14.7821 | 30.0664 | 14.0835 | 0.0276 | |
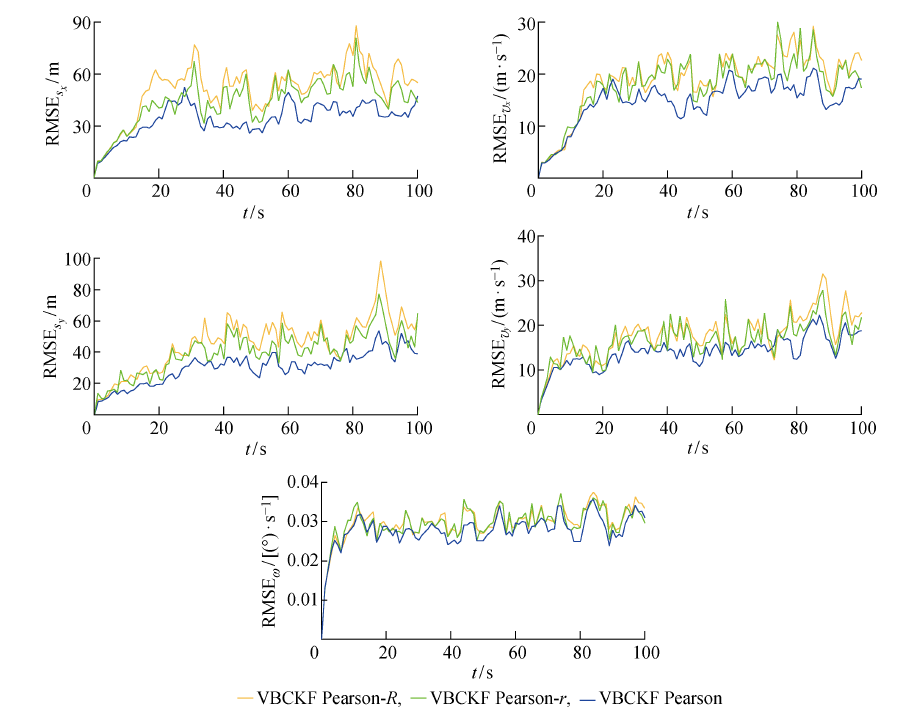
| VBCKF Pearson-R | 50.9088 | 18.8177 | 45.5194 | 17.5744 | 0.0297 | |
| VBCKF Pearson-r | 44.2491 | 17.9638 | 39.9166 | 16.5867 | 0.0294 | |

图2
Robust CKF和VBCKF Pearson算法的均方根误差
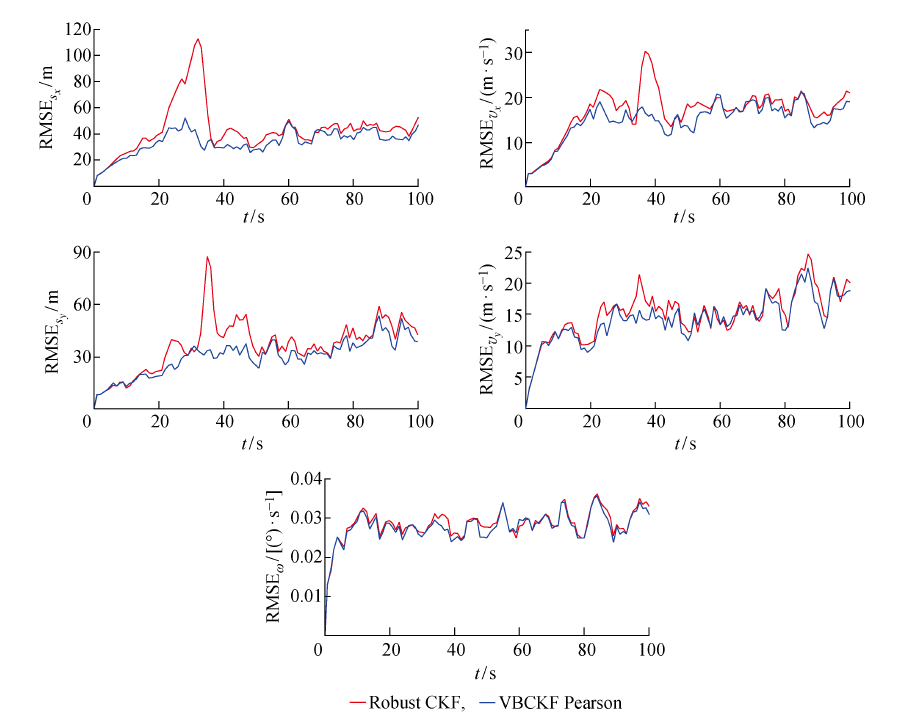
图3
不同VBCKF Pearson算法的均方根误差
| [1] | 杨峰, 郑丽涛, 王家琦, 等. 双层无迹卡尔曼滤波[J]. 自动化学报, 2019,45(7):1386-1391. |
| YANG Feng, ZHENG Litao, WANG Jiaqi, et al. Double layer unscented Kalman filter[J]. Acta Automatica Sinica, 2019,45(7):1386-1391. | |
| [2] | 李建, 何黎明, 蔡云泽. 带有等式状态约束的多传感器数据融合算法[J]. 上海交通大学学报, 2014,48(7):893-898. |
| LI Jian, HE Liming, CAI Yunze. Multi-sensor data fusion algorithm with state equality constraints[J]. Journal of Shanghai Jiao Tong University, 2014,48(7):893-898. | |
| [3] | 胡兵, 杨明, 郭林栋, 等. 基于地面快速鲁棒特征的智能车全局定位方法[J]. 上海交通大学学报, 2019,53(2):81-86. |
| HU Bing, YANG Ming, GUO Lindong, et al. Glo-bal localization for intelligent vehicles using ground SURF[J]. Journal of Shanghai Jiao Tong University, 2019,53(2):81-86. | |
| [4] | LI K L, CHANG L B, HU B Q. A variational Bayesian-based unscented Kalman filter with both adaptivity and robustness[J]. IEEE Sensors Journal, 2016,16(18):6966-6976. |
| [5] | AGAMENNONI G, NEBOT E M. Robust estimation in non-linear state-space models with state-dependent noise[J]. IEEE Transactions on Signal Processing, 2014,62(8):2165-2175. |
| [6] | CHEN B D, LIU X, ZHAO H Q, et al. Maximum correntropy Kalman filter[J]. Automatica, 2017,76:70-77. |
| [7] | LI X R, JILKOV V P. Survey of maneuvering target tracking. Part V. Multiple-model methods[J]. IEEE Transactions on Aerospace and Electronic Systems, 2005,41(4):1255-1321. |
| [8] | DONG P, JING Z L, LEUNG H, et al. Variational Bayesian adaptive cubature information filter based on Wishart distribution[J]. IEEE Transactions on Automatic Control, 2017,62(11):6051-6057. |
| [9] | IZANLOO R, FAKOORIAN S A, YAZDI H S, et al. Kalman filtering based on the maximum correntropy criterion in the presence of non-Gaussian noise [C]//2016 Annual Conference on Information Science and Systems (CISS). Princeton, NJ, USA: IEEE, 2016: 500-505. |
| [10] | BILIK I, TABRIKIAN J. MMSE-based filtering in presence of non-Gaussian system and measurement noise[J]. IEEE Transactions on Aerospace and Electronic Systems, 2010,46(3):1153-1170. |
| [11] | TZIKAS D G, LIKAS A C, GALATSANOS N P. The variational approximation for Bayesian inference[J]. IEEE Signal Processing Magazine, 2008,25(6):131-146. |
| [12] | 潘泉, 胡玉梅, 兰华, 等. 信息融合理论研究进展: 基于变分贝叶斯的联合优化[J]. 自动化学报, 2019,45(7):1207-1223. |
| PAN Quan, HU Yumei, LAN Hua, et al. Information fusion progress: Joint optimization based on variational Bayesian theory[J]. Acta Automatica Sinica, 2019,45(7):1207-1223. | |
| [13] | PICHé R, S?RKKā S, HARTIKAINEN J. Recursive outlier-robust filtering and smoothing for nonli-near systems using the multivariate Student-t distribution [C]//2012 IEEE International Workshop on Machine Learning for Signal Processing. Santander, Spain: IEEE, 2012: 1-6. |
| [14] | YUN P, WU P L, HE S. Pearson type VII distribution-based robust Kalman filter under outliers interference[J]. IET Radar, Sonar & Navigation, 2019,13(8):1389-1399. |
| [15] | HUANG Y L, ZHANG Y G, SHI P, et al. Robust Kalman filters based on Gaussian scale mixture distributions with application to target tracking[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019,49(10):2082-2096. |
| [16] | ARASARATNAM I, HAYKIN S. Cubature Kalman filters[J]. IEEE Transactions on Automatic Control, 2009,54(6):1254-1269. |
| [17] | SUN J Y, KABAN A, GARIBALDI J M. Robust mixture modeling using the Pearson type VII distribution [C]//The 2010 International Joint Conference on Neural Networks (IJCNN). Barcelona, Spain: IEEE, 2010: 1-7. |
| [18] | GOLUB G H, VAN LOAN C F. Matrix computations[M]. 4th ed. Baltimore: The Johns Hopkins University Press, 2013. |
| [1] | 刘源渊, 张顺家, 杨艺, 耿建强. 基于球容积卡尔曼滤波器的鲁棒无源被动定位算法[J]. 空天防御, 2025, 8(5): 53-63. |
| [2] | 张雨格, 耿建强, 杨光宇, 朱苏朋, 侯振乾, 符文星. 基于IMM-SRCKF对机动目标的多弹协同被动定位算法[J]. 空天防御, 2025, 8(2): 58-65. |
| [3] | 臧红岩, 谢晓龙, 徐亚周, 陶业, 高长生. 基于循环神经网络的高超声速机动目标状态估计算法[J]. 空天防御, 2024, 7(4): 88-98. |
| [4] | 钱镭源, 覃方君, 李开龙, 朱天高. 基于SE(3)的鲁棒自适应算法及其在SINS/DVL中的应用[J]. 上海交通大学学报, 2024, 58(4): 498-510. |
| [5] | 崔乃刚, 蔡李根, 荣思远. 基于有向图切换IMM-CKF高速滑翔目标跟踪算法[J]. 空天防御, 2020, 3(3): 1-8. |
| [6] | 王嘉宁, 司伟建, 乔玉龙. 基于正交偶极子阵列的混合信号波达方向与极化参数联合估计[J]. 空天防御, 2020, 3(2): 44-51. |
| [7] | 侯文林1,2,郭英2,张坤峰2,胡月1,2,张羚2. 宽带共形阵列信源方位与极化联合估计算法[J]. 上海交通大学学报(自然版), 2016, 50(05): 764-770. |
| [8] | 徐定杰,沈忱,沈锋. 混合高斯分布的变分贝叶斯学习参数估计[J]. 上海交通大学学报(自然版), 2013, 47(07): 1119-1125. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||