上海交通大学学报 ›› 2020, Vol. 54 ›› Issue (9): 890-897.doi: 10.16183/j.cnki.jsjtu.2019.122
贺宏伟a, 邹早建a,b( ), 曾智华a
), 曾智华a
收稿日期:2019-04-26
出版日期:2020-09-28
发布日期:2020-10-10
通讯作者:
邹早建
E-mail:zjzou@sjtu.edu.cn
作者简介:贺宏伟 (1997-),男,湖南省湘潭市人,硕士生,研究方向为船舶运动控制
基金资助:
HE Hongweia, ZOU Zaojiana,b(), ZENG Zhihuaa
Received:2019-04-26
Online:2020-09-28
Published:2020-10-10
Contact:
ZOU Zaojian
E-mail:zjzou@sjtu.edu.cn
摘要:
针对欠驱动船舶的路径跟随问题,提出了一种综合神经网络和滑模控制的控制方法.采用视线(LOS)制导方法解决船舶欠驱动问题,并设计了关于漂角的自适应状态观测器,将预测的漂角引入LOS以补偿漂角引起的稳态横向偏差;使用滑模控制方法实现航向控制,并用神经网络处理控制模型的不确定性问题;应用Lyapunov理论证明了控制系统的稳定性,同时通过对比仿真试验结果,验证了本文所提出控制器的有效性.
中图分类号:
贺宏伟, 邹早建, 曾智华. 欠驱动水面船舶的自适应神经网络-滑模路径跟随控制[J]. 上海交通大学学报, 2020, 54(9): 890-897.
HE Hongwei, ZOU Zaojian, ZENG Zhihua. Adaptive NN-SM Control for Path Following of Underactuated Surface Vessels[J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 890-897.
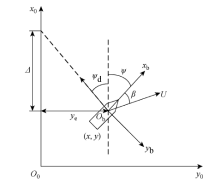
图1
LOS制导示意图
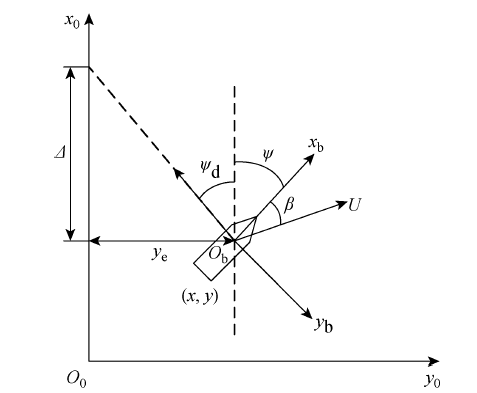
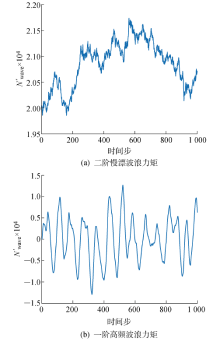
图2
无因次二阶及一阶波浪力矩3.3 数值仿真结果
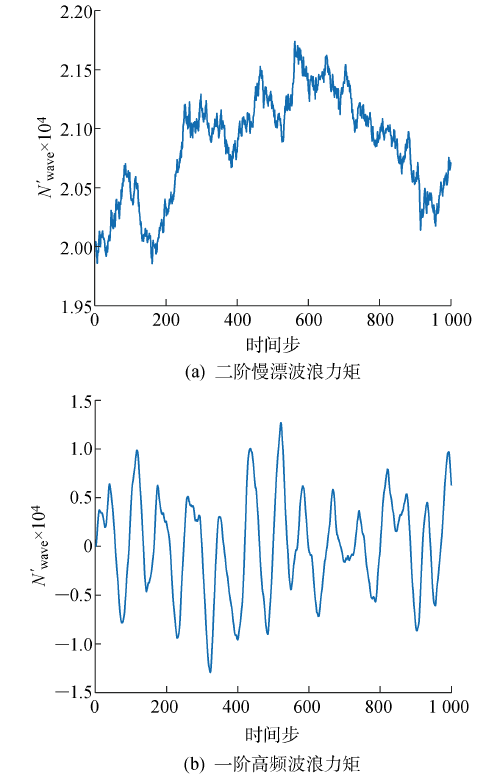

图3
航向控制仿真结果
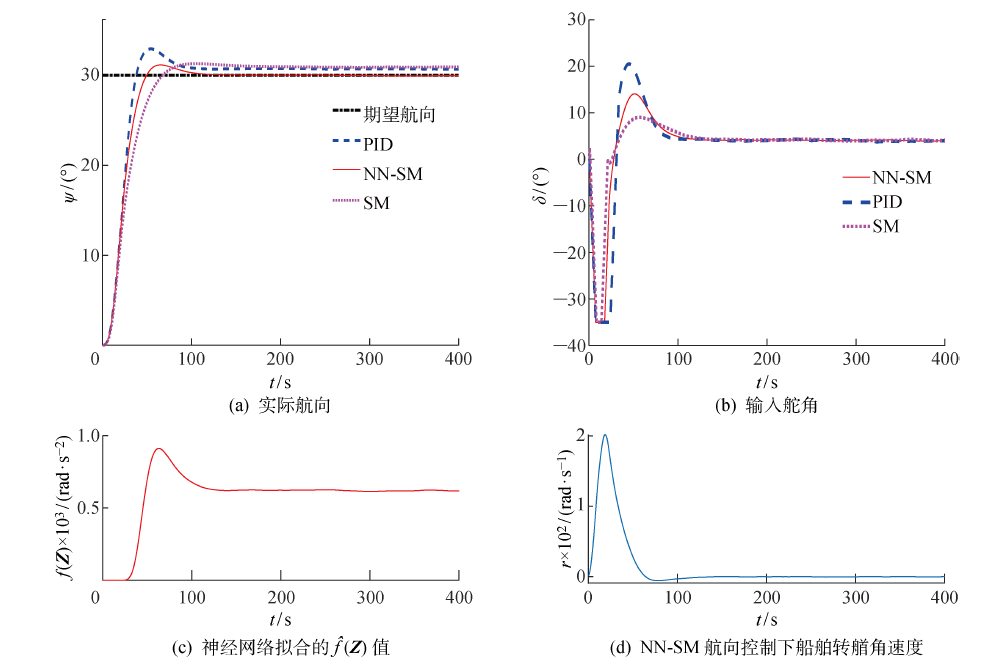
图4
二阶波浪力作用下路径跟随仿真结果
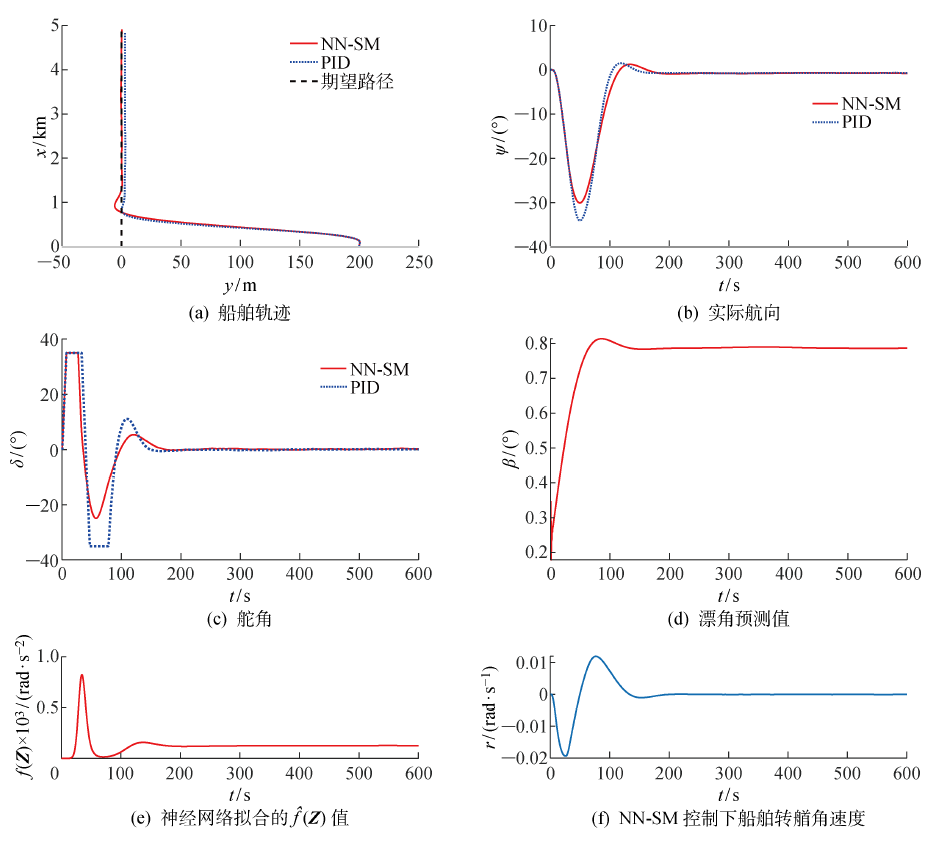
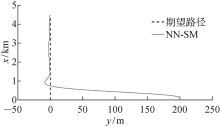
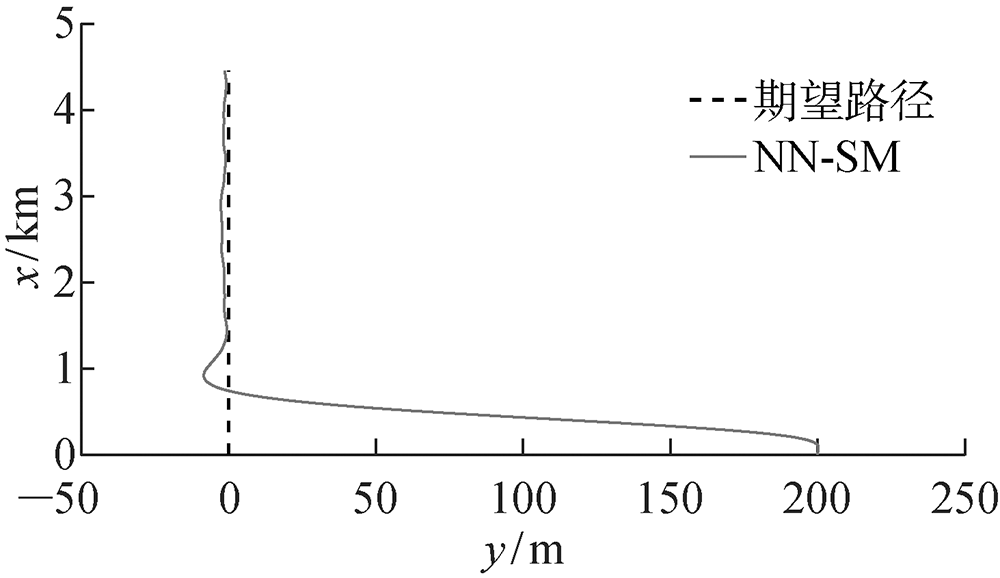
图5
一阶波浪力作用下路径跟随仿真结果
| [1] | HEALEY A J, LIENARD D. Multivariable sliding mode control for autonomous diving and steering of unmanned underwater vehicles[J]. IEEE Journal of Oceanic Engineering, 1993,18(3):327-339. |
| [2] | FREDRIKSEN E, PETTERSEN K Y. Global κ-exponential way-point maneuvering of ships: Theory and experiments[J]. Automatica, 2006,42(4):677-687. |
| [3] | FOSSEN T I, BREIVIK M, SKJETNE R. Line-of-sight path following of underactuated marine craft[J]. IFAC Proceedings Volumes, 2003,36(21):211-216. |
| [4] | LEKKAS A M, FOSSEN T I. Trajectory tracking and ocean current estimation for marine underactuated vehicles [C]//2014 IEEE Conference on Control Applications (CCA). Juan Les Antibes, France: IEEE, 2014: 905-910. |
| [5] | BORHAUG E, PAVLOV A, PETTERSEN K Y. Integral LOS control for path following of underactuated marine surface vessels in the presence of constant ocean currents [C]//IEEE Conference on Decision and Control. Cancun, Mexico: IEEE, 2008: 4984-4991. |
| [6] | KAHVECI N E, IOANNOU P A. Adaptive steering control for uncertain ship dynamics and stability ana-lysis[J]. Automatica, 2013,49(3):685-697. |
| [7] | FOSSEN T I, LEKKAS A M. Direct and indirect adaptive integral line-of-sight path-following controllers for marine craft exposed to ocean currents[J]. International Journal of Adaptive Control & Signal Processing, 2017,31(4):445-463. |
| [8] | LIU C, CHEN C P, ZOU Z, et al. Adaptive NN-DSC control design for path following of underactuated surface vessels with input saturation[J]. Neurocomputing, 2017,267:466-474. |
| [9] | 刘洋, 郭晨. 船舶航向保持RBF神经网络自适应非线性控制[J]. 大连海事大学学报, 2013,39(4):1-4. |
| LIU Yang, GUO Chen. RBF neural network based adaptive nonlinear control for ship course keeping[J]. Journal of Dalian Maritime University, 2013,39(4):1-4. | |
| [10] | 罗伟林, 邹早建, 李铁山. 基于神经网络和L2增益的船舶航向自动舵设计[J]. 中国造船, 2009,50(2):40-45. |
| LUO Weilin, ZOU Zaojian, LI Teishan. Neural-network and L2-gain based autopilot design of ship course-keeping[J]. Shipbuilding of China, 2009,50(2):40-45. | |
| [11] | 秦梓荷, 林壮, 李平, 等. 基于LOS导航的欠驱动船舶滑模控制[J]. 中南大学学报(自然科学版), 2016,47(10):3605-3611. |
| QIN Zihe, LIN Zhuang, LI Ping, et al. Sliding-mode control of underactuated ship based on LOS guidance[J]. Journal of Central South University (Science and Technology), 2016,47(10):3605-3611. | |
| [12] | FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. New York: John Wiley & Sons, 2011: 1-596. |
| [13] | 李铁山, 邹早建, 罗伟林. 基于DSC后推法的非线性系统的鲁棒自适应NN控制[J]. 自动化学报, 2008,34(11):1424-1430. |
| LI Tieshan, ZOU Zaojian, LUO Weilin. DSC-backstepping based robust adaptive NN control for nonlinear systems[J]. Acta Automatica Sinica, 2008,34(11):1424-1430. | |
| [14] | 刘程. 船舶路径跟踪与减横摇综合控制研究[D]. 上海: 上海交通大学, 2015. |
| LIU Cheng. Integrated control of path following and roll motion reduction for marine vessels[D]. Shanghai: Shanghai Jiao Tong University, 2015. | |
| [15] | FOSSEN T I. Guidance and control of ocean vehicles[M]. New York: John Wiley & Sons, 1994: 1-494. |
| [1] | 李诗杰, 刘泰序, 刘佳仑, 董智霖, 徐诚祺. 基于GRU-MPC的双全回转推进拖轮轨迹跟踪控制[J]. 上海交通大学学报, 2026, 60(3): 418-426. |
| [2] | 梁佳铭, 余音, 胡祎乐. 基于时空神经网络的金属疲劳裂纹扩展预测[J]. 上海交通大学学报, 2026, 60(3): 511-521. |
| [3] | . DSNet:用于语音情感识别的带有中性校准的解耦孪生网络[J]. J Shanghai Jiaotong Univ Sci, 2026, 31(2): 248-257. |
| [4] | 夏筱彦, 张宇, 胡锡坤, 钟平. 基于扩散模型的无人机遥感目标检测物理对抗攻击方法研究[J]. 空天防御, 2026, 9(1): 52-62. |
| [5] | . 类间隙滞后非线性系统复合双通道干扰估计自适应控制器设计[J]. J Shanghai Jiaotong Univ Sci, 2026, 31(1): 106-116. |
| [6] | 车志远, 余海涛, 庞玉毅, 章嘉辉. 基于跟踪微分器的永磁同步电动机双时间尺度滑模控制[J]. 上海交通大学学报, 2025, 59(9): 1249-1259. |
| [7] | 黄自鑫, 于澄嵩, 汪伟, 林梦颖, 徐达. 基于等价输入干扰误差估计的欠驱动脉宽调制整流器自抗扰控制[J]. 上海交通大学学报, 2025, 59(8): 1203-1215. |
| [8] | 李湘, 陈思远, 张俊, 柯德平, 高杰迈, 杨欢欢. 基于物理信息嵌入的非固定长度电力系统暂态稳定快速评估[J]. 上海交通大学学报, 2025, 59(7): 962-970. |
| [9] | 王晓倩, 周羽生, 毛源军, 李彬, 周文晴, 苏盛. 基于神经网络分位数的分布式光伏发电功率异常识别方法[J]. 上海交通大学学报, 2025, 59(6): 836-844. |
| [10] | . 基于模型预测控制的欠驱动USV自主航行模型[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(6): 1255-1264. |
| [11] | . 基于深度学习序列方法的多人姿态估计用来检测人体与关键点位置[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(6): 1103-1113. |
| [12] | 曾金灿, 何耿生, 李姚旺, 杜尔顺, 张宁, 朱浩骏. 基于卷积神经网络与轻量级梯度提升树组合模型的电力行业短期以电折碳方法[J]. 上海交通大学学报, 2025, 59(6): 746-757. |
| [13] | 皇金锋, 章乾. 基于超螺旋扩张状态观测器的耦合单电感双输出Buck变换器串级滑模解耦控制[J]. 上海交通大学学报, 2025, 59(5): 592-604. |
| [14] | 黄逸翔, 窦迅, 李林溪, 杨函煜, 于建成, 霍现旭. 基于全局灵敏度分析的综合能源设备响应价值量化方法[J]. 上海交通大学学报, 2025, 59(5): 569-579. |
| [15] | 潘美琪, 贺兴. 基于零样本学习的风力机故障诊断方法[J]. 上海交通大学学报, 2025, 59(5): 561-568. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||