上海交通大学学报 ›› 2020, Vol. 54 ›› Issue (9): 994-999.doi: 10.16183/j.cnki.jsjtu.2020.155
梅蓉( )
)
收稿日期:2020-03-30
出版日期:2020-09-28
发布日期:2020-10-10
作者简介:梅蓉(1978-),女,江苏省海安市人,副教授,主要从事警用无人机控制和侦查技术等研究.电话(Tel.):025-85878913;E-mail: 基金资助:
MEI Rong()
Received:2020-03-30
Online:2020-09-28
Published:2020-10-10
摘要:
针对森林环境下受扰无人直升机的高度和姿态约束控制问题,提出了一种安全跟踪滑模飞行控制方法.为了使无人直升机躲避树木高度威胁并保持期望的飞行姿态,考虑无人直升机的高度和姿态约束,利用误差性能转换函数方法对约束进行处理.基于回馈递推方法和滑模控制方法设计了无人直升机的鲁棒跟踪控制方法,并采用李雅普诺夫稳定性分析方法证明了所有闭环系统信号的收敛性.仿真结果验证了所设计安全滑模飞行控制方法的有效性.
中图分类号:
梅蓉. 森林环境下的无人直升机安全飞行控制[J]. 上海交通大学学报, 2020, 54(9): 994-999.
MEI Rong. Safe Flight Control of Unmanned Helicopter Under Forest Environment[J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 994-999.
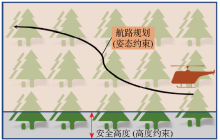
图1
无人直升机高度和姿态约束示意图


图2
高度跟踪误差曲线
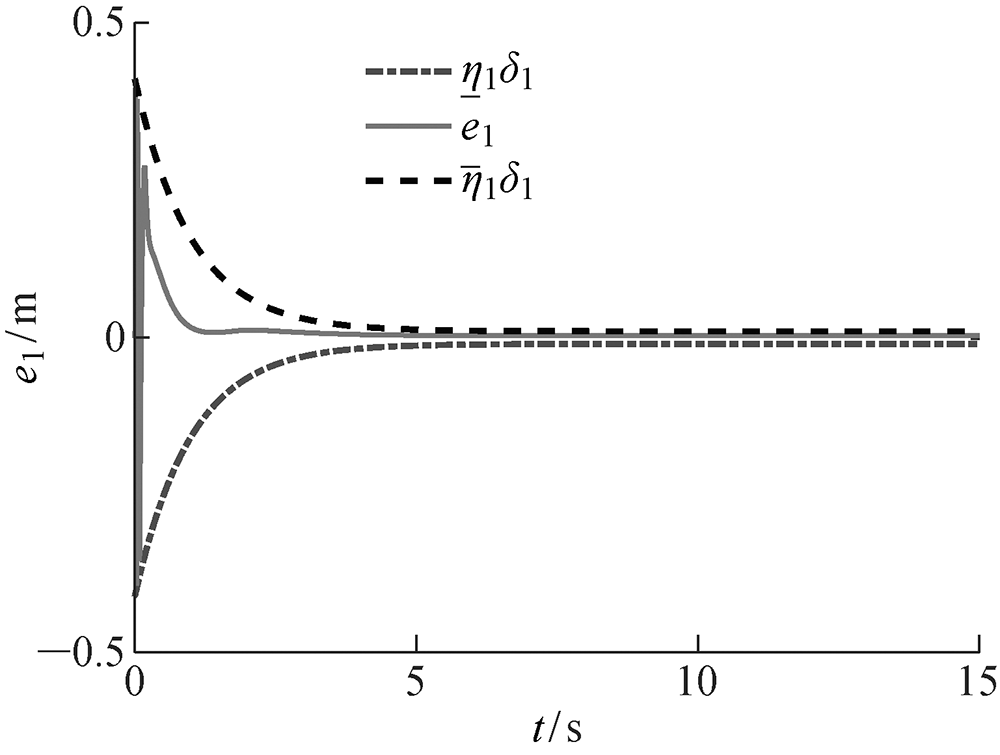
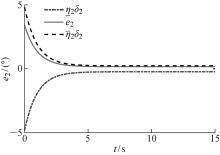
图3
俯仰角跟踪误差曲线
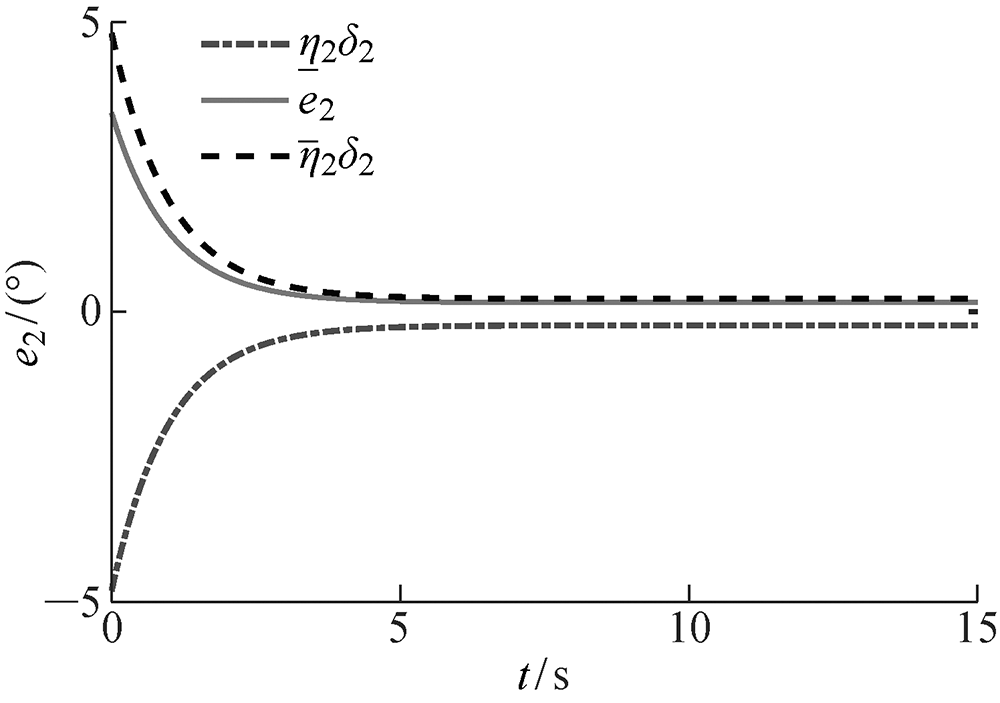
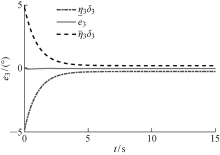
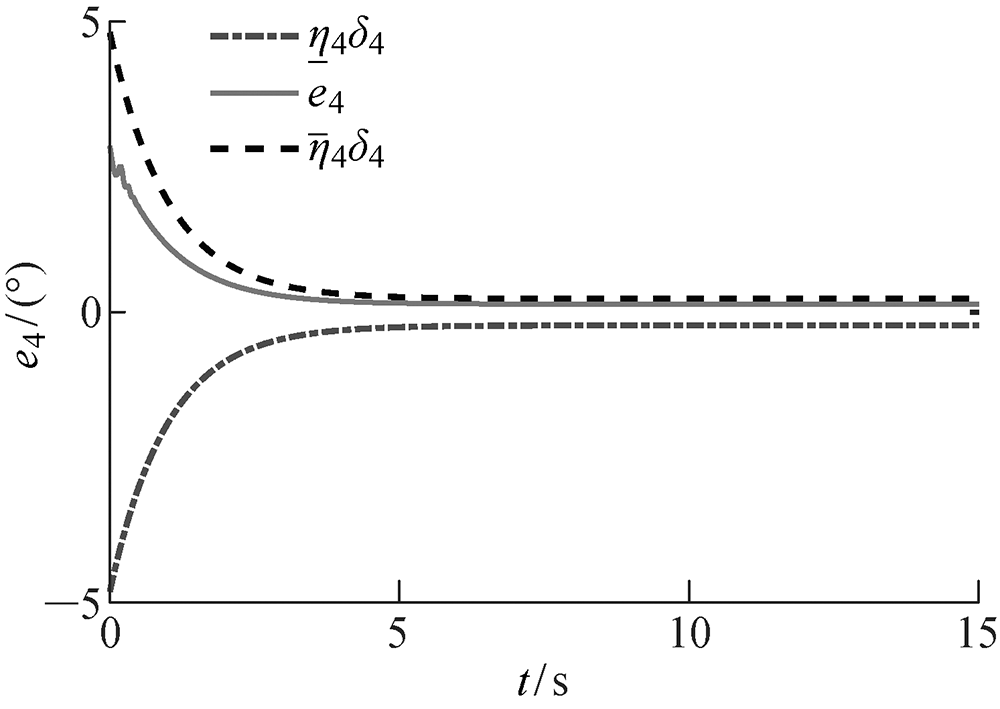
图4
滚转角跟踪误差曲线
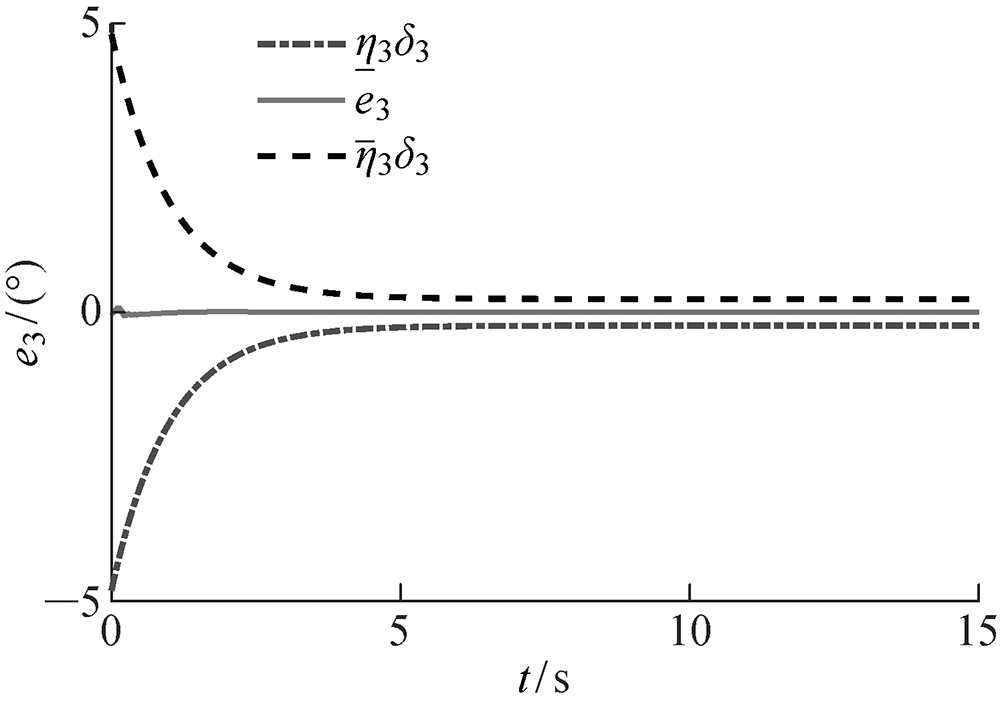
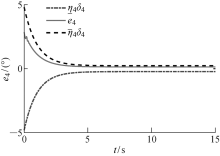
图5
偏航角跟踪误差曲线
| [1] | 莫子洪. 森林防火工作的现状及对策分析[J]. 南方农业, 2018,12(20):90. |
| MO Zihong. Current situation and countermeasure analysis of forest fire prevention[J]. South China Agriculture, 2018,12(20):90. | |
| [2] | 王秋华, 舒立福, 何诚, 等. 无人机在森林消防中的应用探讨[J]. 林业机械与木工设备, 2017,45(3):4-8. |
| WANG Qiuhua, SHU Lifu, HE Cheng, et al. Study on the application of UAVs in forest fire prevention[J]. Forestry Machinery & Woodworking Equipment, 2017,45(3):4-8. | |
| [3] | 孙秀云, 方勇纯, 孙宁. 小型无人直升机的姿态与高度自适应反步控制[J]. 控制理论与应用, 2012,29(3):381-388. |
| SUN Xiuyun, FANG Yongchun, SUN Ning. Backstepping-based adaptive attitude and height control of a small-scale unmanned helicopter[J]. Control Theory & Application, 2012,29(3):381-388. | |
| [4] | XIAN B, GUO J, ZHANG Y. Adaptive backstepping tracking control of a 6-DOF unmanned helicopter[J]. IEEE/CAA Journal of Automatica Sinica, 2015,2(1):19-24. |
| [5] | 王云霞, 代冀阳, 王村松, 等. 一种线性自抗扰控制器的无人直升机姿态控制方法研究[J]. 计算机应用研究, 2019,36(6):1753-1757. |
| WANG Yunxia, DAI Jiyang, WANG Cunsong, et al. Research on attitude control method of unmanned helicopter based on linear active disturbance rejection control[J]. Application Research of Computers, 2019,36(6):1753-1757. | |
| [6] | YAN K, CHEN M, WU Q X, et al. Extended state observer-based sliding mode fault-tolerant control for unmanned autonomous helicopter with wind gusts[J]. IET Control Theory & Applications, 2019,13(10):1500-1513. |
| [7] | MEI R, CUI Q L. Backstepping control for a 3DOF model helicopter with input and output constraint[J]. International Journal of Advanced Robotic Systems, 2017,14(1):1-17. |
| [8] | LIU Y J, TONG S C. Barrier Lyapunov functions-based adaptive control for a class of nonlinear pure-feedback systems with full state constraints[J]. Automatica, 2016,64:70-75. |
| [9] | BECHLIOULIS C P, ROVITHAKIS G A. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance[J]. IEEE Transactions on Automatic Control, 2008,53(9):2090-2099. |
| [10] | YANG H L, JIANG B, YANG H, et al. Synchronization of multiple 3-DOF helicopters under actuator faults and saturations with prescribed performance[J]. ISA Transactions, 2018,75:118-126. |
| [11] | YAN K, CHEN M, WU Q X. Neural network-based adaptive fault tolerant tracking control for unmanned autonomous helicopters with prescribed performance[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2019,233(12):4350-4362. |
| [12] | YAN K, CHEN M, WU Q X, et al. Extended state observer-based sliding mode fault-tolerant control for unmanned autonomous helicopter with wind gusts[J]. IET Control Theory & Applications, 2019,13(10):1500-1513. |
| [13] | 李荣. 无人直升机的非线性鲁棒自适应抗扰控制[D]. 南京: 南京航空航天大学, 2018. |
| LI Rong. Nonlinear robust adaptive anti-disturbance control for unmanned helicopter system[D]. Nanjing: Nanjing University of Aeronautics and Artronautics, 2018. |
| [1] | 王家琪, 郭建国, 郭宗易, 赵斌. 基于干扰观测器的高马赫数飞行器滑模控制[J]. 空天防御, 2021, 4(3): 85-91. |
| [2] | 张显库, 韩旭. 大型油轮艏摇混沌现象的仿真与滑模控制[J]. 上海交通大学学报, 2021, 55(1): 40-47. |
| [3] | 贺宏伟, 邹早建, 曾智华. 欠驱动水面船舶的自适应神经网络-滑模路径跟随控制[J]. 上海交通大学学报, 2020, 54(9): 890-897. |
| [4] | 刘邱, 赵东亚. 单输入单输出系统离散积分滑模预测控制[J]. 上海交通大学学报, 2020, 54(9): 898-903. |
| [5] | 张晓宇, 张鹏, 郑鑫, 倪元华. 基于固定时间收敛的终端角约束滑模制导律设计[J]. 空天防御, 2020, 3(3): 9-15. |
| [6] | 赵斌, 黄晓阳, 周军, 郭玥. 基于滑模控制的多弹分布式视线协同制导律设计[J]. 空天防御, 2020, 3(3): 16-23. |
| [7] | 刘悦, 张佳梁, 赵利娟, 甄子洋. 基于二阶滑模控制的多导弹协同制导律研究[J]. 空天防御, 2020, 3(3): 83-88. |
| [8] | 岳才成1,钱林方1,徐亚栋1,李颖2. 基于指数趋近律链传动弹仓自适应模糊滑模控制[J]. 上海交通大学学报(自然版), 2018, 52(6): 750-756. |
| [9] | 臧月进, 李仁俊, 安国琛. 大气层外反TBM拦截弹变结构末制导律研究[J]. 空天防御, 2018, 1(2): 22-26. |
| [10] | 龚征华1,田震2,熊文1,李俊舟1,李刚强1,袁景淇2. 全局滑模控制方法在喷水推进操舵系统中的应用[J]. 上海交通大学学报(自然版), 2017, 51(6): 693-697. |
| [11] | 李劲松a,杨炼b,王乐天a. 小型四旋翼无人直升机自适应优化控制[J]. 上海交通大学学报(自然版), 2015, 49(02): 202-208. |
| [12] | 李芸,白响恩,肖英杰. 基于新型扩张干扰观测器的船舶航向滑模控制[J]. 上海交通大学学报(自然版), 2014, 48(12): 1708-1713. |
| [13] | 秦斌,周浩,邱丽,郭百顺,王欣. 基于模糊滑模控制的风力发电系统最大风能追踪[J]. 上海交通大学学报(自然版), 2014, 48(07): 993-997. |
| [14] | 李劲松a, 宋立博a, 颜国正b. 基于自适应逆控制方法的小型四旋翼无人直升机姿态控制 [J]. 上海交通大学学报(自然版), 2012, 46(06): 956-961. |
| [15] | 程月华,姜斌,孙俊,樊雯. 基于滑模观测器的卫星姿态控制系统滑模容错控制 [J]. 上海交通大学学报(自然版), 2011, 45(02): 190-0194. |
| 阅读次数 | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
全文 205
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
摘要 891
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||