上海交通大学学报 ›› 2020, Vol. 54 ›› Issue (9): 987-993.doi: 10.16183/j.cnki.jsjtu.2020.148
李朋博1,2,3, 苑明哲1,2( ), 肖金超1,2, 熊俊峰1,2
), 肖金超1,2, 熊俊峰1,2
收稿日期:2020-05-25
出版日期:2020-09-28
发布日期:2020-10-10
通讯作者:
苑明哲
E-mail:mzyuan@sia.cn
作者简介:李朋博(1994-),男,河南省郑州市人,硕士生,研究方向为无人艇运动控制
基金资助:
LI Pengbo1,2,3, YUAN Mingzhe1,2(), XIAO Jinchao1,2, XIONG Junfeng1,2
Received:2020-05-25
Online:2020-09-28
Published:2020-10-10
Contact:
YUAN Mingzhe
E-mail:mzyuan@sia.cn
摘要:
针对欠驱动无人艇位姿保持控制中无法同时兼顾位置和首向角约束的问题,提出了基于航向约束的位姿保持制导策略.首先建立了以无人艇期望位姿为原点的固定坐标系,并将坐标系划分为3个区域:可到达区域A、B和不可到达区域C.在可到达区域内无人艇可依靠前向运动和转首运动回到期望位姿,避免因无法直接产生侧向运动导致首向角变化过大的问题.其次在不同的区域执行不同的制导策略,在制导过程中严格约束无人艇期望航向.最后由制导策略生成的期望速度和期望航向,经由控制器生成执行量,无人艇快速回到期望位姿.基于航向约束的位姿保持制导策略将航向约束由内环控制纳入外环制导,无人艇在不同区域执行不同的制导策略,生成的位姿期望与内环控制相结合,实现了无人艇的位姿保持.外环制导和内环控制约束相结合以兼顾无人艇欠驱动特性,同时简化了控制器设计.仿真实验证明了该制导策略的可行性和有效性.
中图分类号:
李朋博, 苑明哲, 肖金超, 熊俊峰. 基于航向约束的无人艇位姿保持制导策略[J]. 上海交通大学学报, 2020, 54(9): 987-993.
LI Pengbo, YUAN Mingzhe, XIAO Jinchao, XIONG Junfeng. Station Keeping Guidance Strategy Based on Course Constraint for Unmanned Surface Vehicles[J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 987-993.
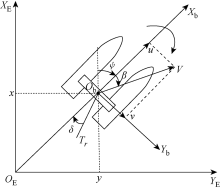
图1
无人艇运动模型:船体固定坐标系ObXbYb和惯性坐标系OEXEYE

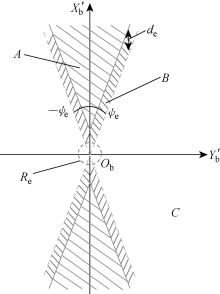
图2
固定坐标系划分示意图

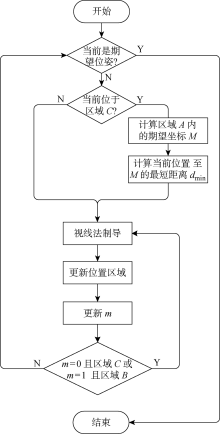
图3
策略流程图
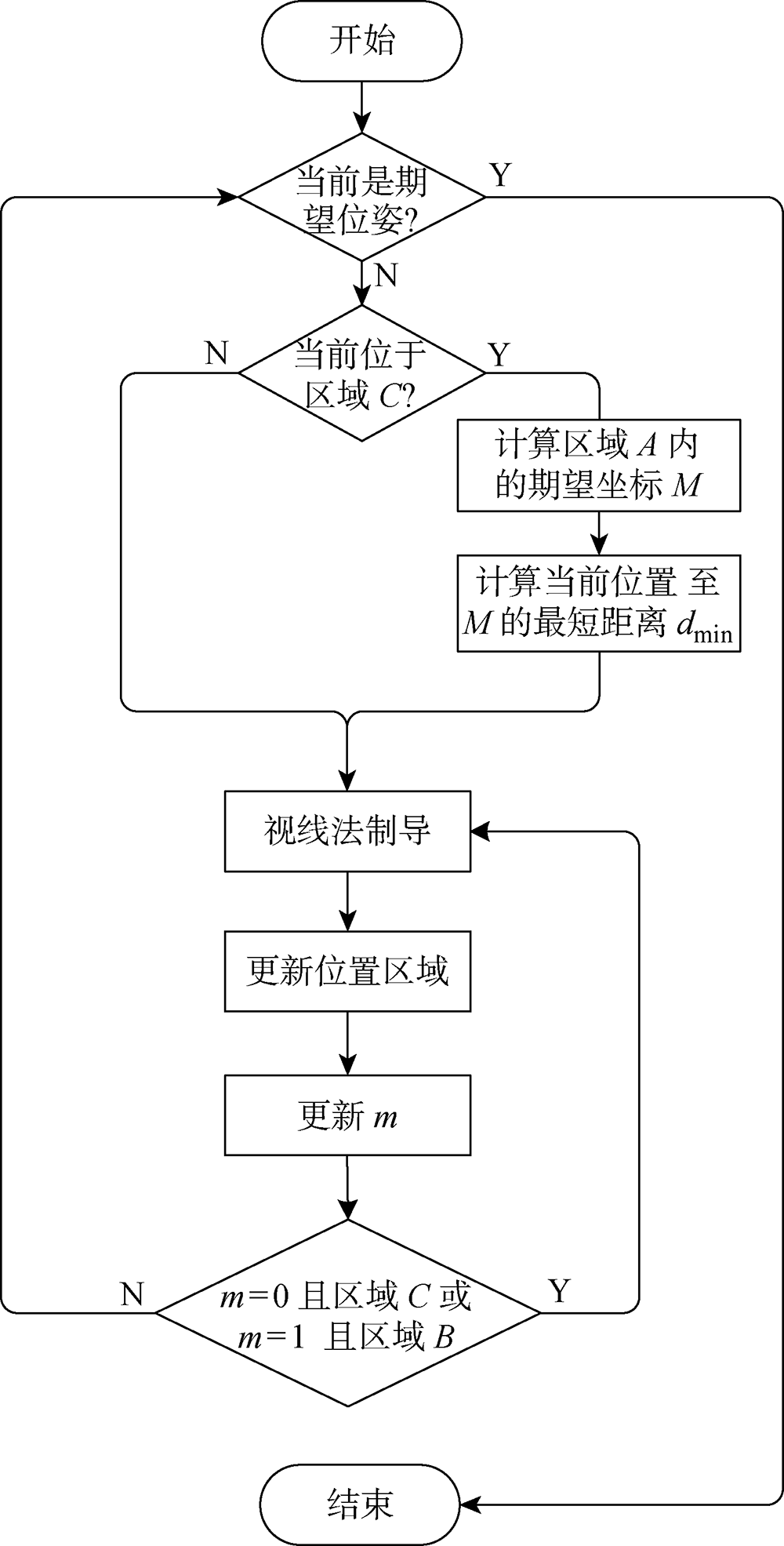
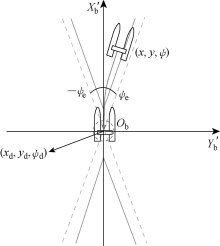
图4
制导策略示意图——情形1
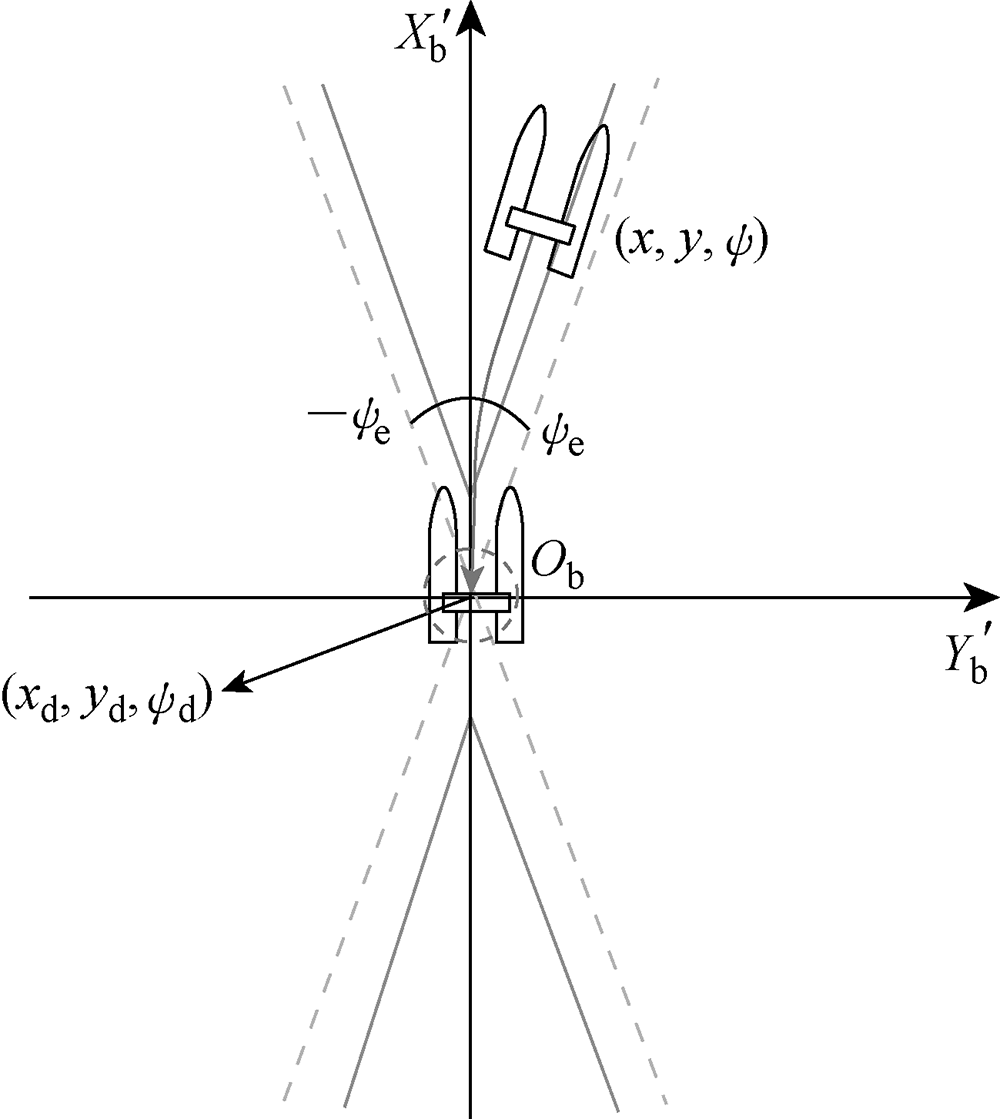
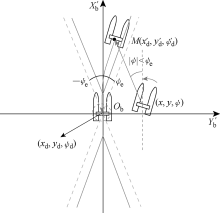
图5
制导策略示意图——情形2

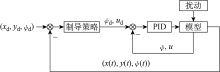
图6
位姿保持控制结构
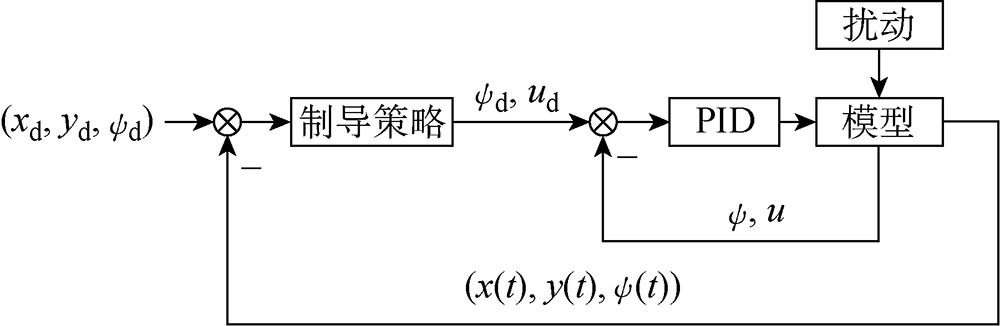
表1
带侧滑的模型参数
| 参数 | 取值 |
|---|---|
| a | -0.005 |
| b | 0.004 |
| Tr | 23.1280 |
| Kr | 0.5149 |
| Tβ | 43.5650 |
| Kβ | -1.0755 |
表2
仿真实验的参数
| 参数 | 取值 |
|---|---|
| 航向角PID | P=30,I=0,D=15 |
| 前向速度PID | P=200,I=0,D=0 |
| 航向角扰动n1(t)/[(°)·s-1] | 4sin(π2t) |
| 纵荡速度扰动n2(t)/(m·s-1) | 3sin(π2t) |
| 横漂速度扰动n3(t)/(m·s-1) | 0.5sin(π2t) |
图7
当Re=0.1 m和de=0.3 m时的位置误差和首向角误差
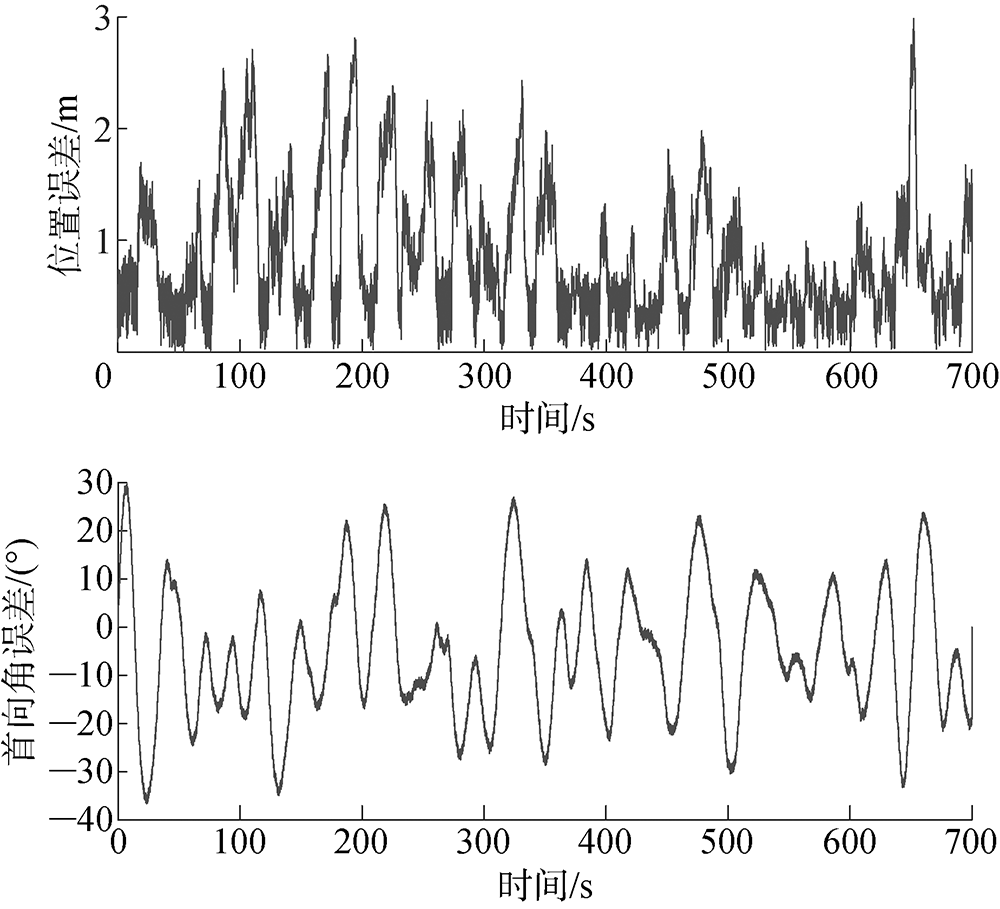
表3
不同Re和de下的位置误差和首向角误差
| 条件/m | 位置平均 误差/m | 位置标准 差/m | 首向角平 均误差/(°) | 首向角标准 误差/(°) |
|---|---|---|---|---|
| Re=0,de=0 | 1.02 | 0.62 | 14.12 | 8.74 |
| Re=0,de=0.3 | 0.86 | 0.59 | 14.30 | 8.99 |
| Re=0.1,de=0.1 | 0.91 | 0.56 | 13.29 | 8.54 |
| Re=0.1,de=0.3 | 0.72 | 0.48 | 11.44 | 8.34 |
| Re=0.4,de=0.1 | 0.61 | 0.67 | 14.82 | 13.41 |

图8
PD控制器和本文制导策略的位置误差和首向角误差对比(Re=0.1 m,de=0.3 m)
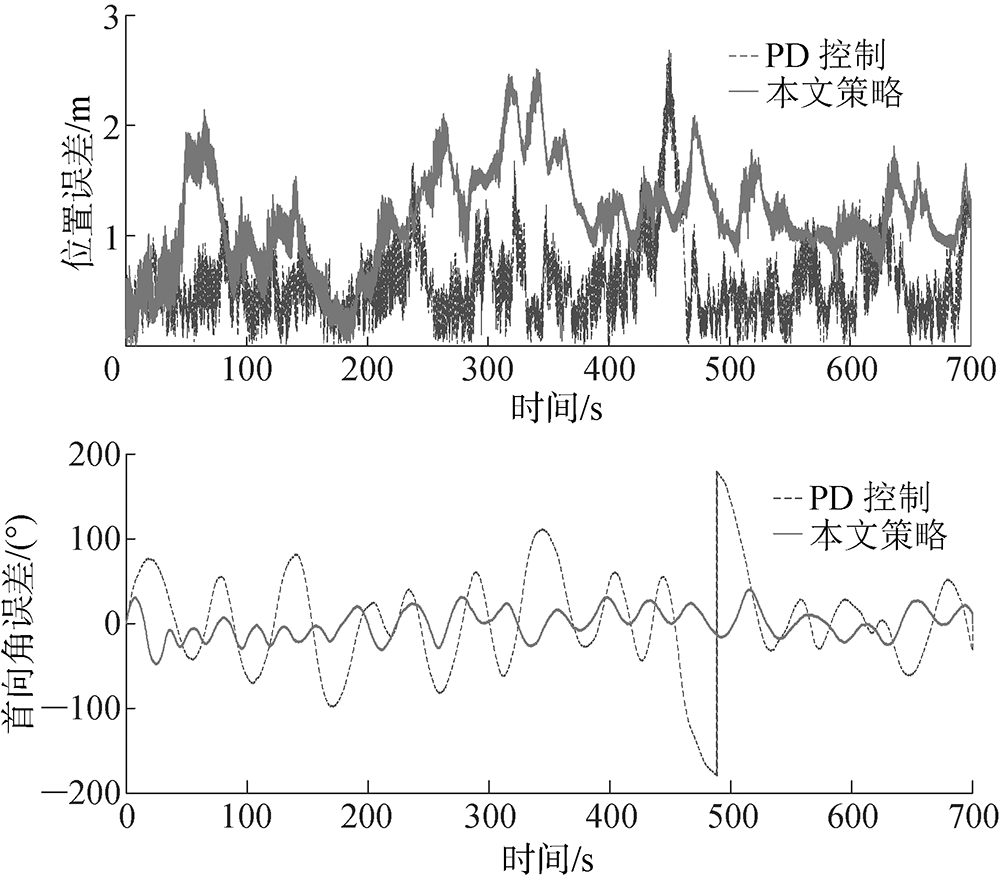
表4
本文制导策略与PD控制器仿真对比
| 分组 | 控制策略 | 位置平均 误差/m | 位置标准 差/m | 首向角平 均误差/(°) | 首向角标 准差/(°) |
|---|---|---|---|---|---|
| 1 | 本文策略 | 0.95 | 0.54 | 13.43 | 8.95 |
| PD控制 | 0.54 | 0.31 | 30.79 | 26.09 | |
| 2 | 本文策略 | 1.08 | 0.89 | 14.24 | 11.03 |
| PD控制 | 0.56 | 0.47 | 41.93 | 31.75 | |
| 3 | 本文策略 | 1.06 | 0.41 | 15.32 | 10.17 |
| PD控制 | 0.59 | 0.32 | 44.41 | 34.79 |
| [1] | FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. Chichester, UK: John Wiley & Sons, 2011. |
| [2] | QU H, SARDA E I, BERTASKA I R, et al. Wind feed-forward control of a USV [C]//OCEANS 2015: Genova. Genoa, Italy: IEEE, 2015: 1-10. |
| [3] | QU H, VON ELLENRIEDER K D, Adaptive wind feedforward control of an Unmanned Surface Vehicle for station keeping [C]//OCEANS 2015: MTS/IEEE Washington. Washington, DC, USA: IEEE, 2015: 1-10. |
| [4] | SAKIYAMA J, MOTOI N. Position and attitude control method using disturbance observer for station keeping in underwater vehicle [C]//IECON 2018: 44th Annual Conference of the IEEE Industrial Electronics Society. Washington, DC, USA: IEEE, 2018: 5469-5474. |
| [5] | KNUDSEN K B, NIELSEN M C, SCHJ?LBERG I. Deep learning for station keeping of AUVs [C]//OCEANS 2019 MTS/IEEE, Seattle. Seattle, WA, USA: IEEE, 2019: 1-6. |
| [6] | CHEN E, HUANG S, LIN Y, et al. Station keeping of an autonomous surface vehicle in surf zone [C]//2013 MTS/IEEE OCEANS: Bergen. Bergen, Norway: IEEE, 2013: 1-6. |
| [7] | BERTASKA I R, VON ELLENRIEDER K D. Supervisory switching control of an unmanned surface vehicle [C]//OCEANS 2015: MTS/IEEE Washington. Washington, DC, USA: IEEE, 2015: 1-10. |
| [8] | BERTASKA I R, ELLENRIEDER K D. Experimental evaluation of supervisory switching control for unmanned surface vehicles[J]. IEEE Journal of Oceanic Engineering, 2019,44(1):7-28. |
| [9] | SONNENBURG C R, WOOLSEY C A. Modeling, identification, and control of an unmanned surface vehicle[J]. Journal of Field Robotics, 2013,30(3):371-398. |
| [10] | HAN J D, XIONG J F, HE Y Q, et al. Nonlinear modeling for a water-jet propulsion USV: An experimental study[J]. IEEE Transactions on Industrial Electronics, 2017,64(4):3348-3358. |
| [1] | 陆展, 王健, 马庆严, 徐昌健, 梁晓锋. 基于分层优化的双喷水推进器无人艇推力分配方法[J]. 上海交通大学学报, 2026, 60(3): 427-439. |
| [2] | 巩超, 侯远杭, 张宇骐, 刘殿勇, 万跃进. 畸形波浪环境下的埋首式无人艇水面运动特性[J]. 上海交通大学学报, 2025, 59(4): 447-457. |
| [3] | 胡智焕, 谢威, 刘若楠, 张卫东. 俄乌冲突中无人艇海上作战模式的新突破[J]. 海洋工程装备与技术, 2024, 11(1): 18-22. |
| [4] | 刘杰, 孙全, 贾军. 无人艇防空装备设想及作战模式初探[J]. 空天防御, 2018, 1(2): 7-13. |
| [5] | 王健a,刘旌扬a, b,魏成柱a,易宏a, b. 新概念无人穿梭艇静水操纵性能[J]. 上海交通大学学报, 2017, 51(3): 288-. |
| [6] | 孙寒冰1, 苏玉民1, 邹劲1, 张可心2, 庄佳园1. 高速无人艇纵向航行性能试验[J]. 上海交通大学学报(自然版), 2013, 47(02): 278-283. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||