上海交通大学学报 ›› 2020, Vol. 54 ›› Issue (9): 987-993.doi: 10.16183/j.cnki.jsjtu.2020.148
李朋博1,2,3, 苑明哲1,2( ), 肖金超1,2, 熊俊峰1,2
), 肖金超1,2, 熊俊峰1,2
LI Pengbo1,2,3, YUAN Mingzhe1,2(), XIAO Jinchao1,2, XIONG Junfeng1,2
摘要:
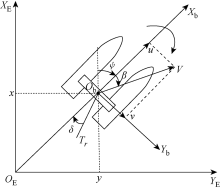
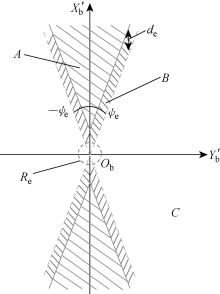
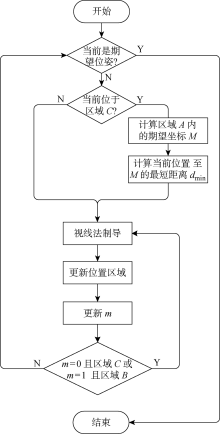
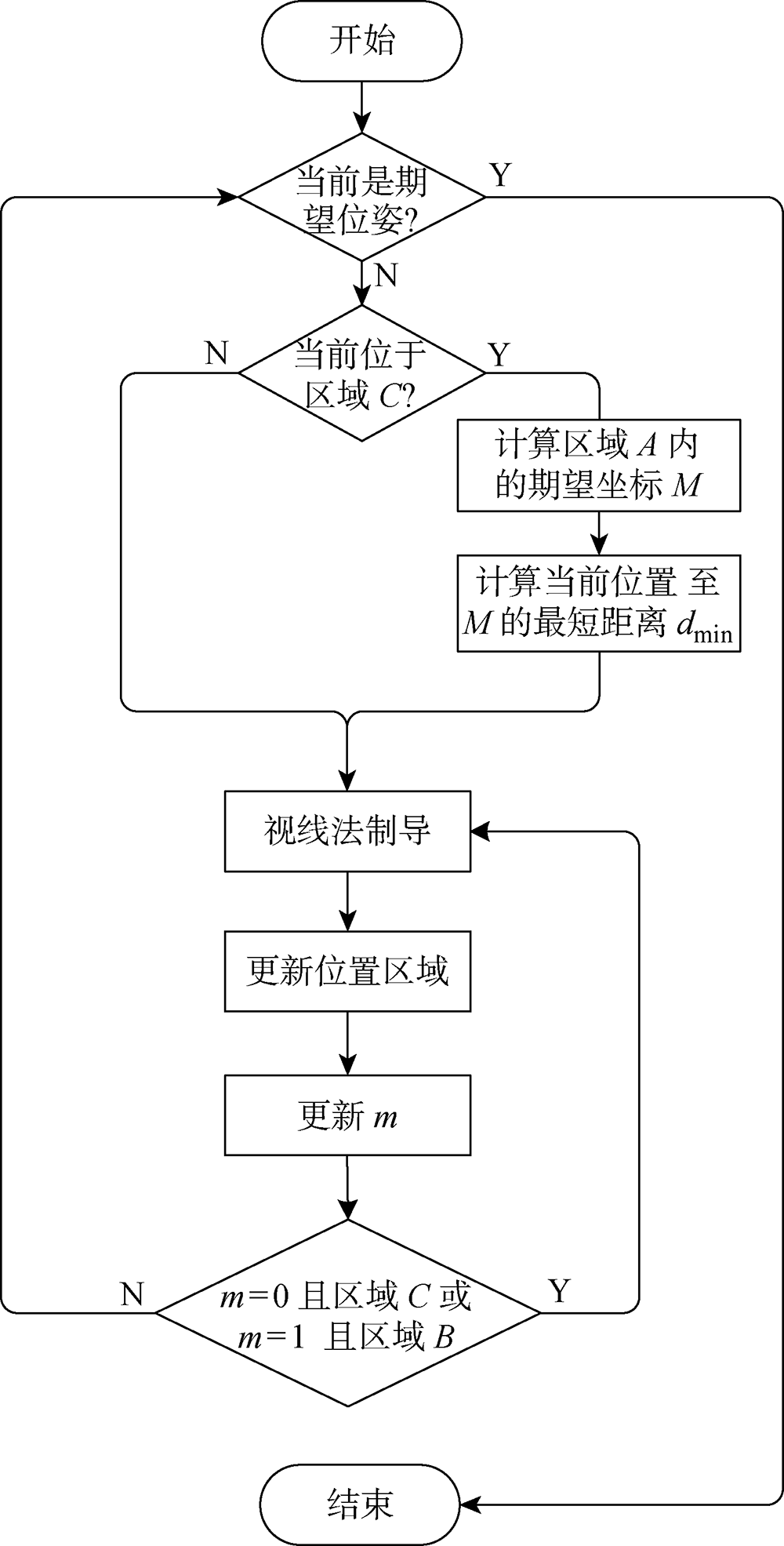
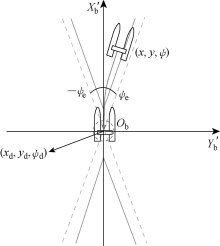
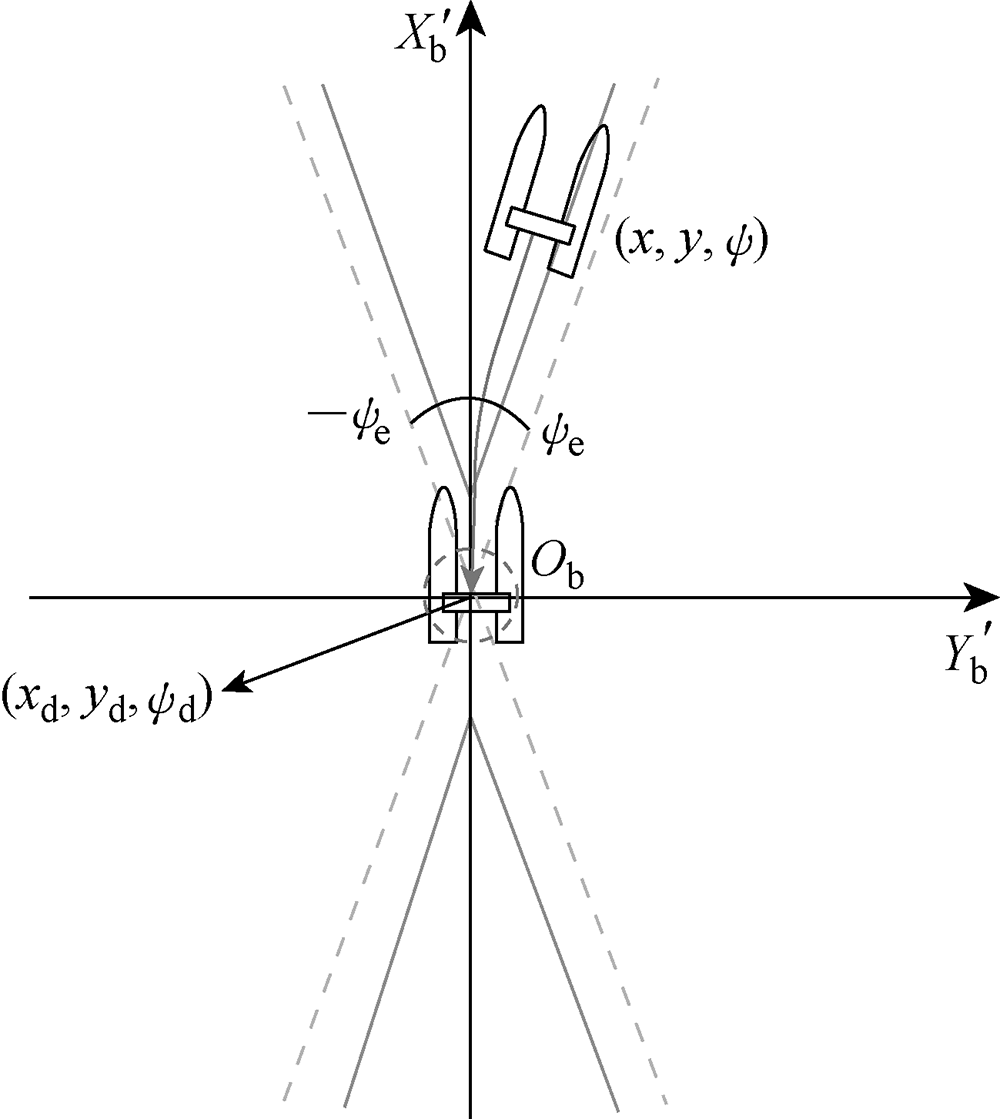
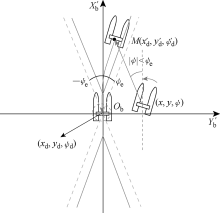
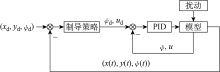
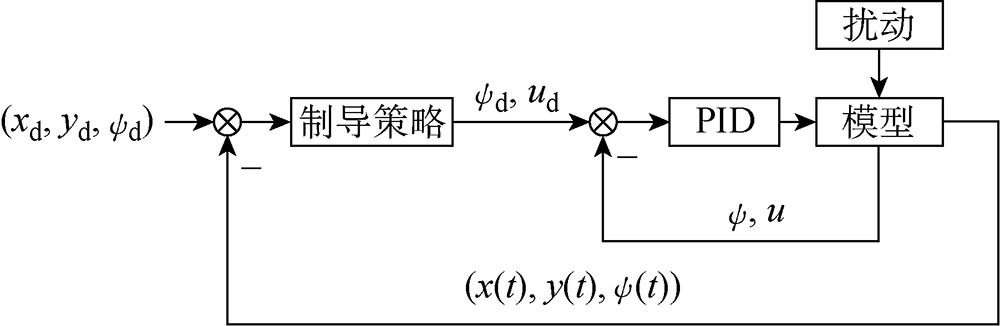
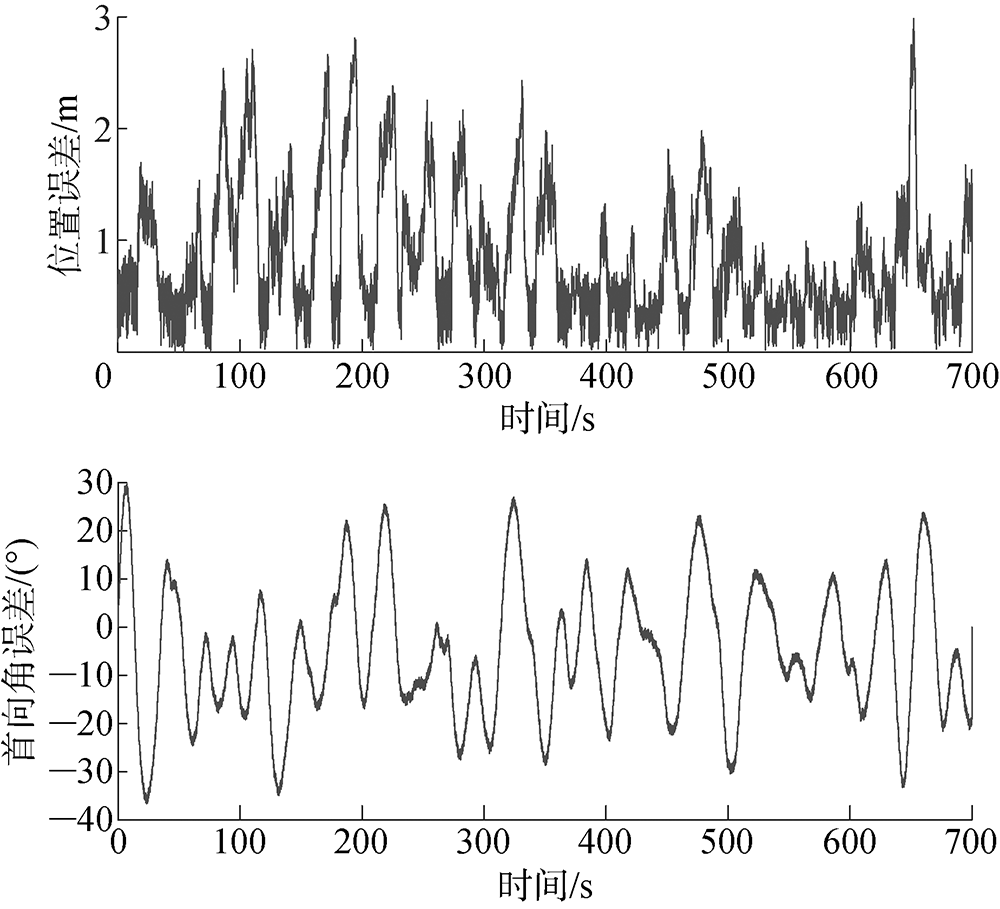
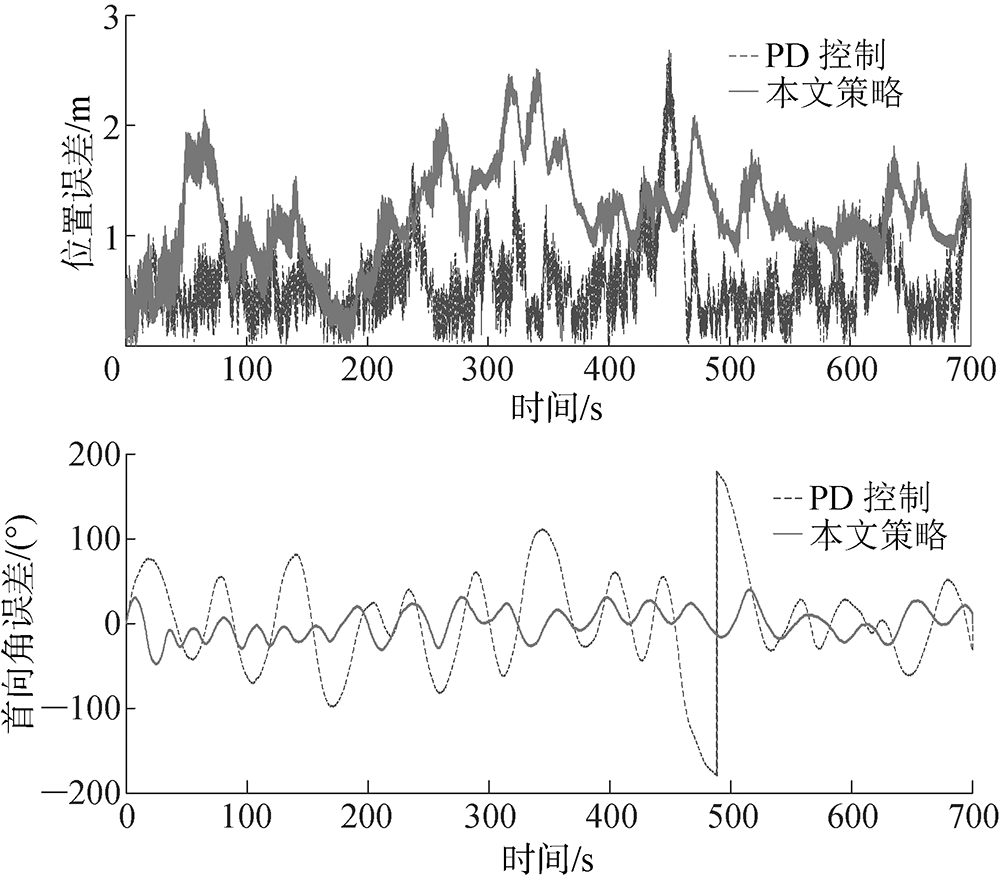
针对欠驱动无人艇位姿保持控制中无法同时兼顾位置和首向角约束的问题,提出了基于航向约束的位姿保持制导策略.首先建立了以无人艇期望位姿为原点的固定坐标系,并将坐标系划分为3个区域:可到达区域A、B和不可到达区域C.在可到达区域内无人艇可依靠前向运动和转首运动回到期望位姿,避免因无法直接产生侧向运动导致首向角变化过大的问题.其次在不同的区域执行不同的制导策略,在制导过程中严格约束无人艇期望航向.最后由制导策略生成的期望速度和期望航向,经由控制器生成执行量,无人艇快速回到期望位姿.基于航向约束的位姿保持制导策略将航向约束由内环控制纳入外环制导,无人艇在不同区域执行不同的制导策略,生成的位姿期望与内环控制相结合,实现了无人艇的位姿保持.外环制导和内环控制约束相结合以兼顾无人艇欠驱动特性,同时简化了控制器设计.仿真实验证明了该制导策略的可行性和有效性.
中图分类号: