上海交通大学学报 ›› 2020, Vol. 54 ›› Issue (9): 898-903.doi: 10.16183/j.cnki.jsjtu.2020.169
刘邱, 赵东亚( )
)
收稿日期:2019-12-11
出版日期:2020-09-28
发布日期:2020-10-10
通讯作者:
赵东亚
E-mail:dyzhao@upc.edu.cn
作者简介:刘邱(1995-),男,重庆市人,硕士生,从事滑模控制和预测控制的研究
基金资助:
LIU Qiu, ZHAO Dongya()
Received:2019-12-11
Online:2020-09-28
Published:2020-10-10
Contact:
ZHAO Dongya
E-mail:dyzhao@upc.edu.cn
摘要:
基于离散滑模控制理论和模型预测控制理论,针对一类带有外界干扰的单输入单输出控制系统提出了一种离散时间积分滑模预测控制算法.该控制算法结合了滑模控制和预测控制的优点,利用积分滑模降低了干扰对系统的影响,保证了系统的整体鲁棒性.并且该控制算法具有预测控制不需要严格的模型形式以及对系统输出进行滚动优化的特点,从而降低了控制器对系统模型的要求,增强了其控制性能.最后通过稳定性分析以及MATLAB软件仿真验证了该控制算法的有效性.
中图分类号:
刘邱, 赵东亚. 单输入单输出系统离散积分滑模预测控制[J]. 上海交通大学学报, 2020, 54(9): 898-903.
LIU Qiu, ZHAO Dongya. Discrete-Time Integral Sliding Mode Predictive Control for Single Input Single Output Systems[J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 898-903.
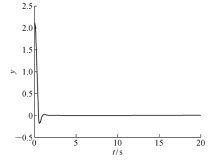
图1
纯预测控制无干扰的输出

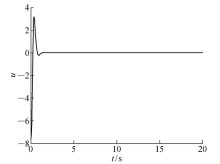
图2
纯预测控制无干扰的输入
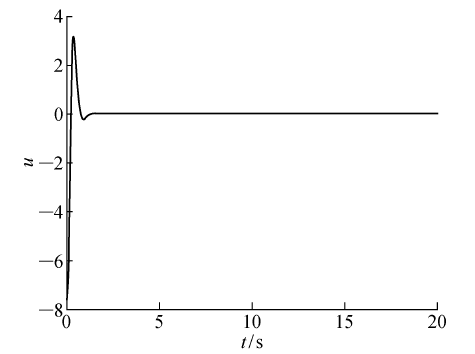
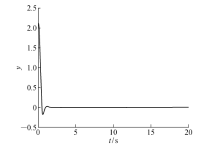
图3
纯预测控制有干扰的输出

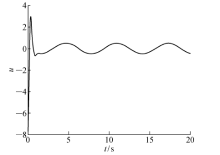
图4
纯预测控制有干扰的输入
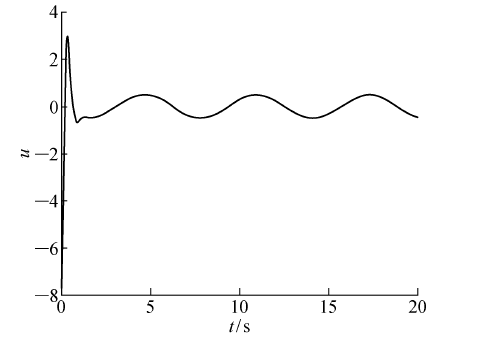
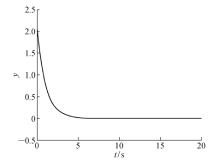
图5
滑模预测控制无干扰的输出

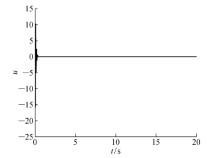
图6
滑模预测控制无干扰的输入

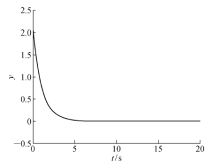
图7
滑模预测控制有干扰的输出
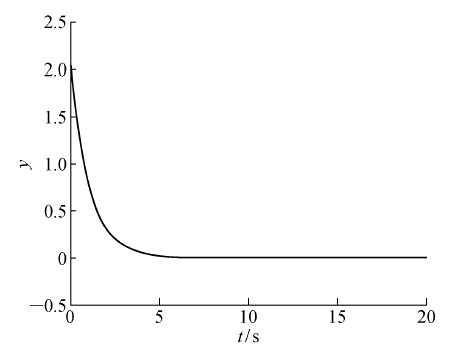

图8
滑模预测控制有干扰的输入

| [1] | UTKIN V. Variable structure systems with sliding modes[J]. IEEE Transactions on Automatic Control, 1977,22(2):212-222. |
| [2] | 刘金琨. 滑模变结构控制MATLAB仿真[M]. 北京: 清华大学出版社, 2005. |
| LIU Jinkun. MATLAB simulation for sliding mode control[M]. Beijing: Tsinghua University Press, 2005. | |
| [3] | SLOTINE J J E, LI W. Applied nonlinear control[M]. Englewood Cliffs, NJ, USA: Prentice Hall, 1991. |
| [4] | HUNG C P. Integral variable structure control of nonlinear system using a CMAC neural network learning approach[J]. IEEE Transactions on Systems, Man, and Cybernetics—Part B: Cybernetics, 2004,34(1):702-709. |
| [5] | WANG J D, LEE T L, JUANG Y T. New methods to design an integral variable structure controller[J]. IEEE Transactions on Automatic Control, 1996,41(1):140-143. |
| [6] | CASTANOS F, FRIDMAN L. Analysis and design of integral sliding manifolds for systems with unmatchedperturbations[J]. IEEE Transactions on Automatic Control, 2006,51(5):853-858. |
| [7] | CAO W J, XU J X. Nonlinear integral-type sliding surface for both matched and unmatched uncertain systems[J]. IEEE Transactions on Automatic Control, 2004,49(8):1355-1360. |
| [8] | XI Z, HESKETH T. Discrete time integral sliding mode control for systems with matched and unmatched uncertainties[J]. IET Control Theory & Applications, 2010,4(5):889-896. |
| [9] | 陈虹. 模型预测控制[M]. 北京: 科学出版社, 2013. |
| CHEN Hong. Model predictive control[M]. Beijing: Science Press, 2013. | |
| [10] | STEINBERGER M, CASTILLO I, HORN M, et al. Model predictive output integral sliding mode control [C]//International Workshop on Variable Structure Systems (VSS). Nanjing, China: IEEE, 2016: 228-233. |
| [11] | ROBERTS P D. A brief overview of model predictive control[J]. Computing & Control Engineering Jouranl, 1999,10(5):186-188. |
| [12] | 宋立忠, 陈少昌, 姚琼荟. 多输入离散时间系统滑模预测控制[J]. 电机与控制学报, 2005,9(2):128-132. |
| SONG Lizhong, CHEN Shaochang, YAO Qionghui. Sliding mode predictive control for multi-input discrete-time systems[J]. Electric Machines and Control, 2005,9(2):128-132. | |
| [13] | 周建锁, 刘志远, 裴润. 约束非线性系统的滑模预测控制方法[J]. 控制与决策, 2001,16(2):207-210. |
| ZHOU Jiansuo, LIU Zhiyuan, PEI Run. Sliding mode predictive control scheme for constrained nonlinear systems[J]. Control and Decision, 2001,16(2):207-210. |
| [1] | 姜俊豪, 陈刚. 驾驶机器人转向操纵的动态模型预测控制方法[J]. 上海交通大学学报, 2022, 56(5): 594-603. |
| [2] | 沈阳武, 宋兴荣, 罗紫韧, 沈非凡, 黄晟. 基于模型预测控制的分布式储能型风力发电场惯性控制策略[J]. 上海交通大学学报, 2022, 56(10): 1285-1293. |
| [3] | 李彪, 王立文, 邢志伟, 王思博, 罗谦. 飞机地面除冰资源协同控制[J]. 上海交通大学学报, 2021, 55(11): 1362-1370. |
| [4] | 何德峰, 彭彬彬, 顾煜佳, 余世明. 基于高斯过程回归的车辆巡航系统学习预测控制[J]. 上海交通大学学报, 2020, 54(9): 904-909. |
| [5] | 王志文, 刘伟. 拒绝服务攻击下信息物理系统事件触发广义预测控制[J]. 上海交通大学学报, 2020, 54(9): 910-915. |
| [6] | 张建军, 吴中华, 刘群坡, 王红旗, 刘卫东. 主从机械手遥操作双边自适应阻抗控制策略[J]. 上海交通大学学报, 2020, 54(6): 615-623. |
| [7] | 方佳, 陆志强. 考虑设备故障的鲁棒调度计划模板的建模优化[J]. 上海交通大学学报, 2020, 54(12): 1278-1290. |
| [8] | 李冬辉,高峰. 基于扰动观测器的压缩式制冷系统改进Smith预估解耦控制[J]. 上海交通大学学报, 2019, 53(5): 593-599. |
| [9] | 韩刚,蔡旭. 不平衡电网下风电并网变流器的滑模电流控制[J]. 上海交通大学学报(自然版), 2018, 52(9): 1065-1071. |
| [10] | 王琳,邹媛媛,李少远. 基于性能触发的双层结构模型预测控制[J]. 上海交通大学学报(自然版), 2018, 52(10): 1324-1332. |
| [11] | 孔小兵1,范昌2,刘向杰1. 超超临界机组主汽温分布式监督预测控制[J]. 上海交通大学学报(自然版), 2017, 51(10): 1252-1259. |
| [12] | 王玄,陶建峰,张峰榕,吴亚瑾,刘成良. 基于预测控制的单向比例泵控非对称液压缸系统控制方法[J]. 上海交通大学学报(自然版), 2016, 50(05): 696-701. |
| [13] | 曹阳, 贺登博, 喻凡, 罗哲. 基于主动转向的车辆路径跟随广义预测控制[J]. 上海交通大学学报, 2016, 50(03): 401-406. |
| [14] | 吕学勤1,张轲2,吴毅雄2. 移动焊接机器人轨迹跟踪控制机制及实验[J]. 上海交通大学学报(自然版), 2015, 49(03): 371-374. |
| [15] | 肖慧孝,杨建国,张毅. 基于状态空间模型的机床热误差动态建模[J]. 上海交通大学学报(自然版), 2014, 48(1): 22-26. |
| 阅读次数 | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
全文 581
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
摘要 1035
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||