上海交通大学学报 ›› 2020, Vol. 54 ›› Issue (9): 904-909.doi: 10.16183/j.cnki.jsjtu.2020.173
何德峰( ), 彭彬彬, 顾煜佳, 余世明
), 彭彬彬, 顾煜佳, 余世明
收稿日期:2019-12-17
出版日期:2020-09-28
发布日期:2020-10-10
作者简介:何德峰(1979-),男,浙江省义乌市人,教授,博士生导师,从事模型预测控制理论与应用的研究.电话(Tel): 0571-85290372; E-mail:基金资助:
HE Defeng(), PENG Binbin, GU Yujia, YU Shiming
Received:2019-12-17
Online:2020-09-28
Published:2020-10-10
摘要:
针对自动巡航系统中前车加速度预测问题,以及为满足人们对车辆安全性、舒适性和经济性要求,提出一种基于高斯过程回归的车辆自动巡航系统学习预测控制策略.先用高斯过程回归法对前车加速度做学习建模,再结合车间运动学模型定义车辆自动巡航系统预测模型.进而,通过在线滚动优化车辆自动巡航系统安全性、舒适性和经济性综合指标,建立车辆自动巡航系统学习预测控制器.最后,通过CarSim/Simulink联合仿真平台,将本方法的加减速典型驾驶工况与传统预测巡航控制策略下的驾驶工况对比验证.结果表明:与传统控制策略相比,本文方法更具有效性和优越性.
中图分类号:
何德峰, 彭彬彬, 顾煜佳, 余世明. 基于高斯过程回归的车辆巡航系统学习预测控制[J]. 上海交通大学学报, 2020, 54(9): 904-909.
HE Defeng, PENG Binbin, GU Yujia, YU Shiming. Learning Predictive Control of Vehicular Automated Cruise Systems Based on Gaussian Process Regression[J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 904-909.
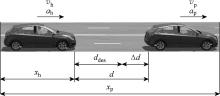
图1
车辆跟踪场景
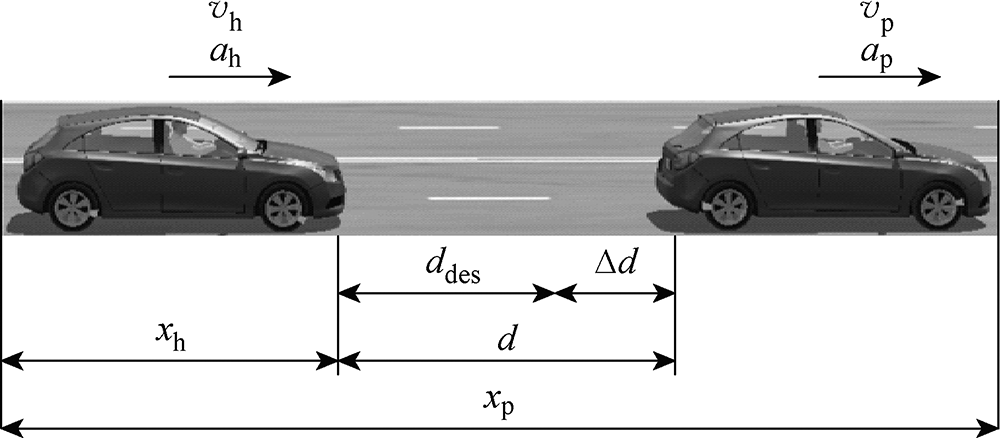

图2
本车加速度曲线

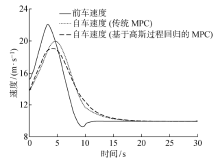
图3
本车速度曲线
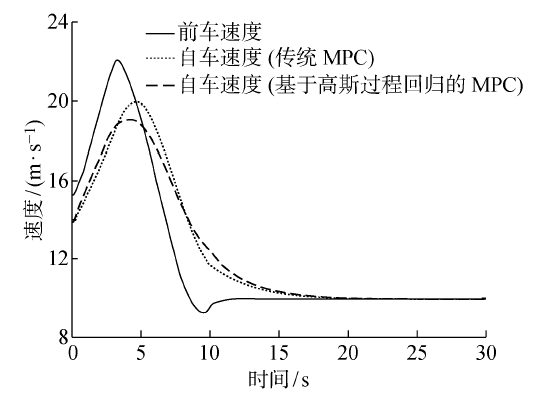
图4
车间距实时曲线
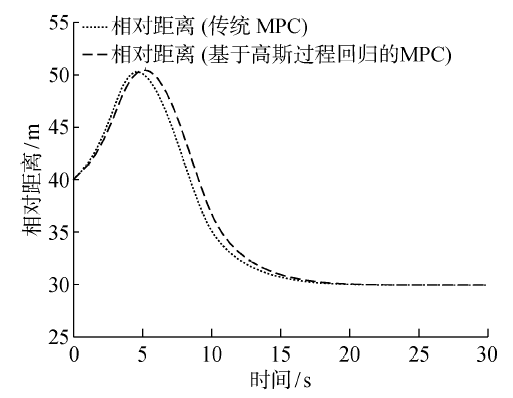
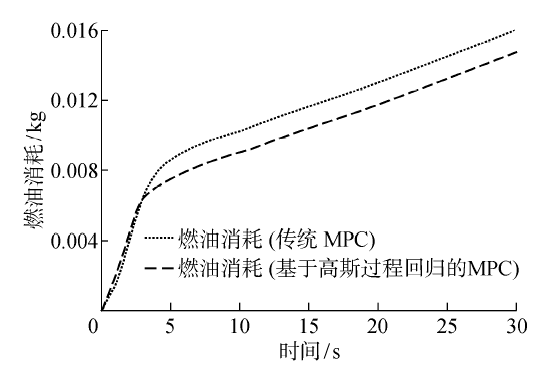
图5
本车燃油消耗实时曲线
| [1] | 张亮修, 吴光强, 郭晓晓. 车辆多目标自适应巡航控制算法[J]. 西安交通大学学报, 2016,50(11):136-143. |
| ZHANG Liangxiu, WU Guangqiang, GUO Xiaoxiao. Vehicular multi-objective adaptive cruise control algorithm[J]. Journal of Xi’an Jiaotong University, 2016,50(11):136-143. | |
| [2] | 吴光强, 张亮修, 刘兆勇, 等. 汽车自适应巡航控制系统研究现状与发展趋势[J]. 同济大学学报(自然科学版), 2017,45(4):544-553. |
| WU Guangqiang, ZHANG Liangxiu, LIU Zhaoyong, et al. Research status and development trend of vehicle adaptive cruise control systems[J]. Journal of Tongji University (Natural Science), 2017,45(4):544-553. | |
| [3] | ZHANG J, IOANNOU P A. Longitudinal control of heavy trucks in mixed traffic: Environmental and fuel economy considerations[J]. IEEE Transactions on Intelligent Transportation Systems, 2006,7(1):92-104. |
| [4] | HE D F, WANG L, SUN J. On stability of multiobjective NMPC with objective prioritization[J]. Automatica, 2015,57:189-198. |
| [5] | HE D F, HUANG H, CHEN Q X. Quasi-min-max MPC for constrained nonlinear systems with guaranteed input-to-state stability[J]. Journal of the Franklin Institute, 2014,351(6):3405-3423. |
| [6] | KAMAL M A S, MUKAI M, MURATA J, et al. Model predictive control of vehicles on urban roads for improved fuel economy[J]. IEEE Transactions on Control Systems Technology, 2013,21(3):831-841. |
| [7] | 李升波, 王建强, 李克强, 等. MPC实用化问题处理及在车辆ACC中的应用[J]. 清华大学学报(自然科学版), 2010,50(5):645-648. |
| LI Shengbo, WANG Jianqiang, LI Keqiang, et al. Processing of MPC practical problems and its application to vehicular adaptive cruise control systems[J]. Journal of Tsinghua University (Science and Technology), 2010,50(5):645-648. | |
| [8] | EBEN LI S, LI K Q, WANG J Q. Economy-oriented vehicle adaptive cruise control with coordinating multiple objectives function[J]. Vehicle System Dynamics, 2013,51(1):1-17. |
| [9] | LI S E, JIA Z Z, LI K Q, et al. Fast online computation of a model predictive controller and its application to fuel economy-oriented adaptive cruise control[J]. IEEE Transactions on Intelligent Transportation Systems, 2015,16(3):1199-1209. |
| [10] | 朱敏, 陈慧岩. 考虑车间反应时距的汽车自适应巡航控制策略[J]. 机械工程学报, 2017,53(24):144-150. |
| ZHU Min, CHEN Huiyan. Strategy for vehicle adaptive cruise control considering the reaction headway[J]. Journal of Mechanical Engineering, 2017,53(24):144-150. | |
| [11] | ZHAO R C, WONG P K, XIE Z C, et al. Real-time weighted multi-objective model predictive controller for adaptive cruise control systems[J]. International Journal of Automotive Technology, 2017,18(2):279-292. |
| [12] | MESBAH A. Stochastic model predictive control: An overview and perspectives for future research[J]. IEEE Control Systems, 2016,36(6):30-44. |
| [13] | LEFèVRE S, SUN C, BAJCSY R, et al. Comparison of parametric and non-parametric approaches for vehicle speed prediction [C]//American Control Conference. Portland, OR, USA: IEEE, 2014: 3494-3499. |
| [14] | RASMUSSEN C E, WILLIAMS C K I. Gaussian processes for machine learning[M]. Cambridge, MA, USA: The MIT Press, 2006. |
| [15] | 何志昆, 刘光斌, 赵曦晶, 等. 高斯过程回归方法综述[J]. 控制与决策, 2013,28(8):1121-1129. |
| HE Zhikun, LIU Guangbin, ZHAO Xijing, et al. Overview of Gaussian process regression[J]. Control and Decision, 2013,28(8):1121-1129. | |
| [16] | 肖红军, 刘乙奇, 黄道平. 高斯过程建模方法在工业过程中的应用[J]. 华南理工大学学报(自然科学版), 2016,44(12):36-43. |
| XIAO Hongjun, LIU Yiqi, HUANG Daoping. Application of Gaussian process modeling method in industrial processes[J]. Journal of South China University of Technology (Natural Science Edition), 2016,44(12):36-43. | |
| [17] | 陈虹. 模型预测控制[M]. 北京: 科学出版社, 2013. |
| CHEN Hong. Model predictive control[M]. Beijing: Science Press, 2013. | |
| [18] | 孙涛, 夏维, 李道飞. 基于模型预测控制的协同式自适应巡航控制系统[J]. 中国机械工程, 2017,28(4):486-491. |
| SUN Tao, XIA Wei, LI Daofei. CACC system based on MPC[J]. China Mechanical Engineering, 2017,28(4):486-491. |
| [1] | 姜俊豪, 陈刚. 驾驶机器人转向操纵的动态模型预测控制方法[J]. 上海交通大学学报, 2022, 56(5): 594-603. |
| [2] | 王子垚, 郭凤祥, 陈俐. 基于外推高斯过程回归方法的发动机排放预测[J]. 上海交通大学学报, 2022, 56(5): 604-610. |
| [3] | 沈阳武, 宋兴荣, 罗紫韧, 沈非凡, 黄晟. 基于模型预测控制的分布式储能型风力发电场惯性控制策略[J]. 上海交通大学学报, 2022, 56(10): 1285-1293. |
| [4] | 李彪, 王立文, 邢志伟, 王思博, 罗谦. 飞机地面除冰资源协同控制[J]. 上海交通大学学报, 2021, 55(11): 1362-1370. |
| [5] | 刘健,陈自强,黄德扬,郑昌文,周诗尧,姜余. 基于等压差充电时间的锂离子电池寿命预测[J]. 上海交通大学学报, 2019, 53(9): 1058-1065. |
| [6] | 王琳,邹媛媛,李少远. 基于性能触发的双层结构模型预测控制[J]. 上海交通大学学报(自然版), 2018, 52(10): 1324-1332. |
| [7] | 王玄,陶建峰,张峰榕,吴亚瑾,刘成良. 基于预测控制的单向比例泵控非对称液压缸系统控制方法[J]. 上海交通大学学报(自然版), 2016, 50(05): 696-701. |
| [8] | 罗莉华. 基于MPC的车道保持系统转向控制策略[J]. 上海交通大学学报(自然版), 2014, 48(07): 1015-1020. |
| [9] | 鲍荣, 何德峰, 郑凯华. 基于黄金分割法的阶梯式约束预测控制[J]. 上海交通大学学报(自然版), 2012, 46(12): 1940-1944. |
| [10] | 李刚1, 2, 宗长富1, 张泽星1, 段明序1, 梁赫奇3, 洪伟1. 车辆底盘集成控制研究[J]. 上海交通大学学报(自然版), 2012, 46(08): 1291-1296. |
| [11] | 黄昆, 喻凡, 张勇超. 基于能量流动分析的电磁式馈能型主动悬架控制[J]. 上海交通大学学报(自然版), 2011, 45(07): 1068-1073. |
| [12] | 黄昆,喻凡,张勇超. 电磁式主动悬架模型预测控制器设计 [J]. 上海交通大学学报(自然版), 2010, 44(11): 1619-1624. |
| 阅读次数 | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
全文 601
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
摘要 |
|
|||||||||||||||||||||||||||||||||||||||||||||||||