上海交通大学学报 ›› 2023, Vol. 57 ›› Issue (10): 1282-1291.doi: 10.16183/j.cnki.jsjtu.2022.191
所属专题: 《上海交通大学学报》2023年“交通运输工程”专题
黄鹤a,b, 高永博a, 茹锋a,b, 杨澜c( ), 王会峰b
), 王会峰b
收稿日期:2022-06-01
修回日期:2022-09-01
接受日期:2022-10-17
出版日期:2023-10-28
发布日期:2023-10-31
通讯作者:
杨澜
E-mail:lanyang@chd.edu.cn.
作者简介:黄鹤(1979-),教授,博士生导师,研究方向为无人系统测控、信息融合等.
基金资助:
HUANG Hea,b, GAO Yongboa, RU Fenga,b, YANG Lanc(), WANG Huifengb
Received:2022-06-01
Revised:2022-09-01
Accepted:2022-10-17
Online:2023-10-28
Published:2023-10-31
Contact:
YANG Lan
E-mail:lanyang@chd.edu.cn.
摘要:
针对无人机在三维路径规划时存在搜素范围和寻优性能不足等问题,以及现有黏菌算法(SMA)寻优精度不足, 易陷入局部最优的缺陷,提出了一种基于自适应黏菌算法(GSMA)优化的无人机三维路径规划方法.首先,根据无人机经过的实际环境,建立三维地形、威胁源和无人机自身约束条件;其次,针对搜素范围不足的问题,设计改进的Logistic混沌映射增加种群的多样性并扩大搜索范围,提升了SMA的全局搜索能力;然后,设计一种非线性自适应惯性权重因子,将线性收敛方式改进为非线性收敛,利用权重值更新黏菌位置,提高了收敛速度;最后,在算法后期中设计自适应柯西变异,增大了黏菌的搜索空间,寻优精度也得到了提高.实验结果表明,GSMA相比于灰狼优化(GWO)算法、SMA和海鸥算法(SOA)3种算法,路径更短且更平滑,收敛速度更快,寻优精度更高,同时能耗更低,进一步提升了无人机的路径规划能力.
中图分类号:
黄鹤, 高永博, 茹锋, 杨澜, 王会峰. 基于自适应黏菌算法优化的无人机三维路径规划[J]. 上海交通大学学报, 2023, 57(10): 1282-1291.
HUANG He, GAO Yongbo, RU Feng, YANG Lan, WANG Huifeng. 3D Path Planning of UAV Based on Adaptive Slime Mould Algorithm Optimization[J]. Journal of Shanghai Jiao Tong University, 2023, 57(10): 1282-1291.
图1
w系数变化图
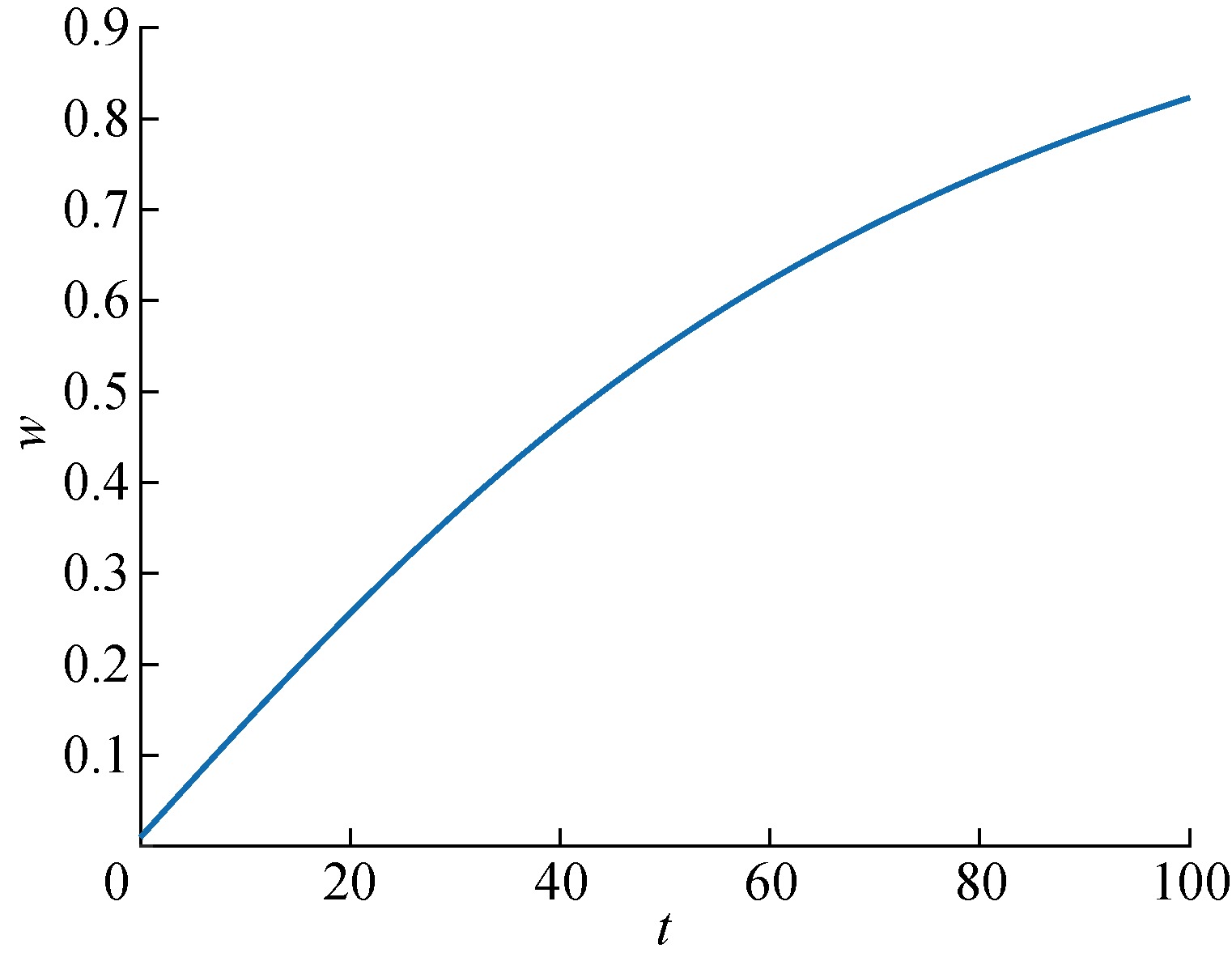

图2
GSMA收敛过程
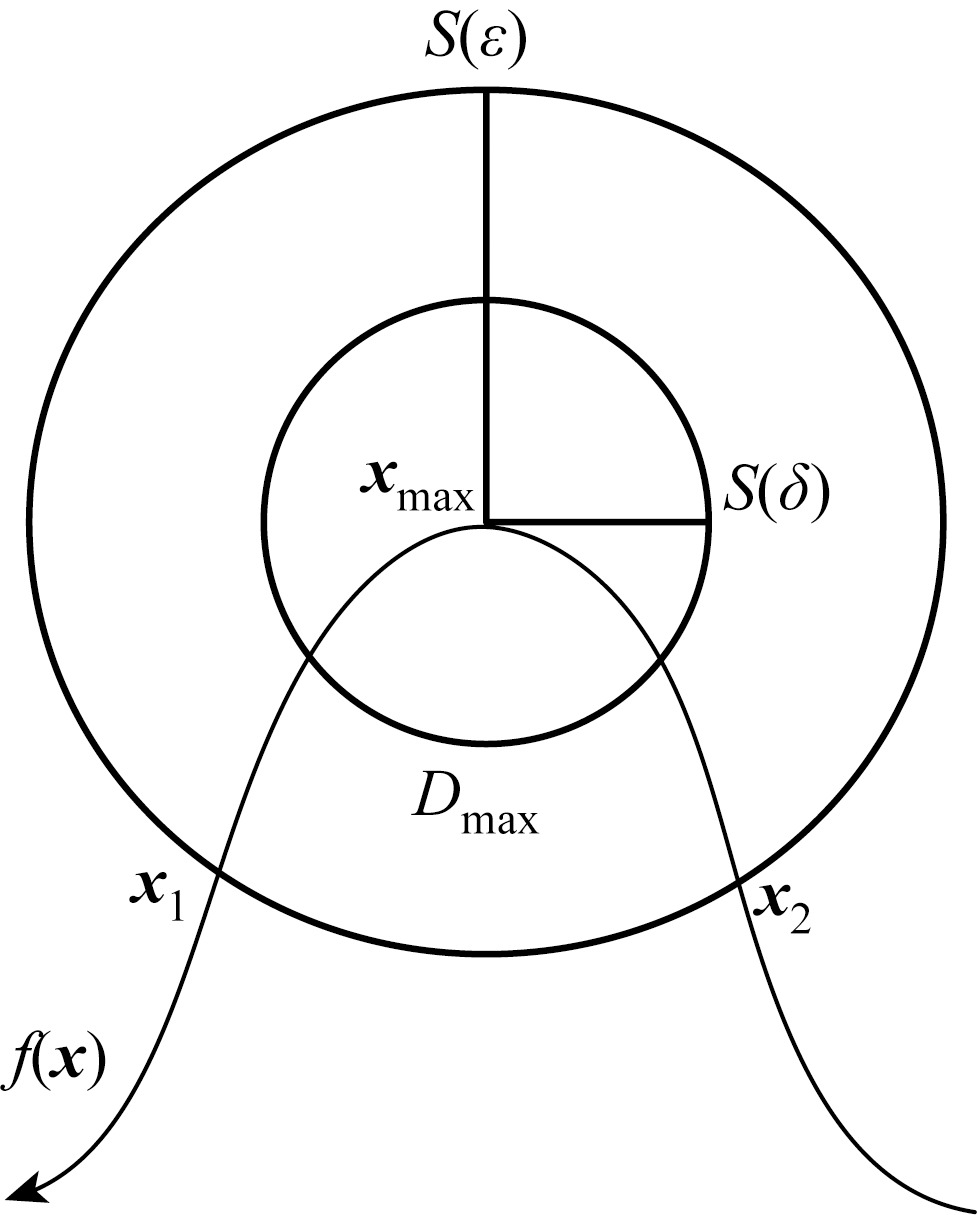
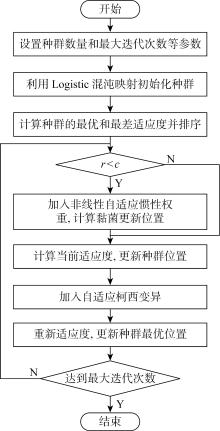
图3
算法流程图

图4
各测试函数上的适应度变化曲线
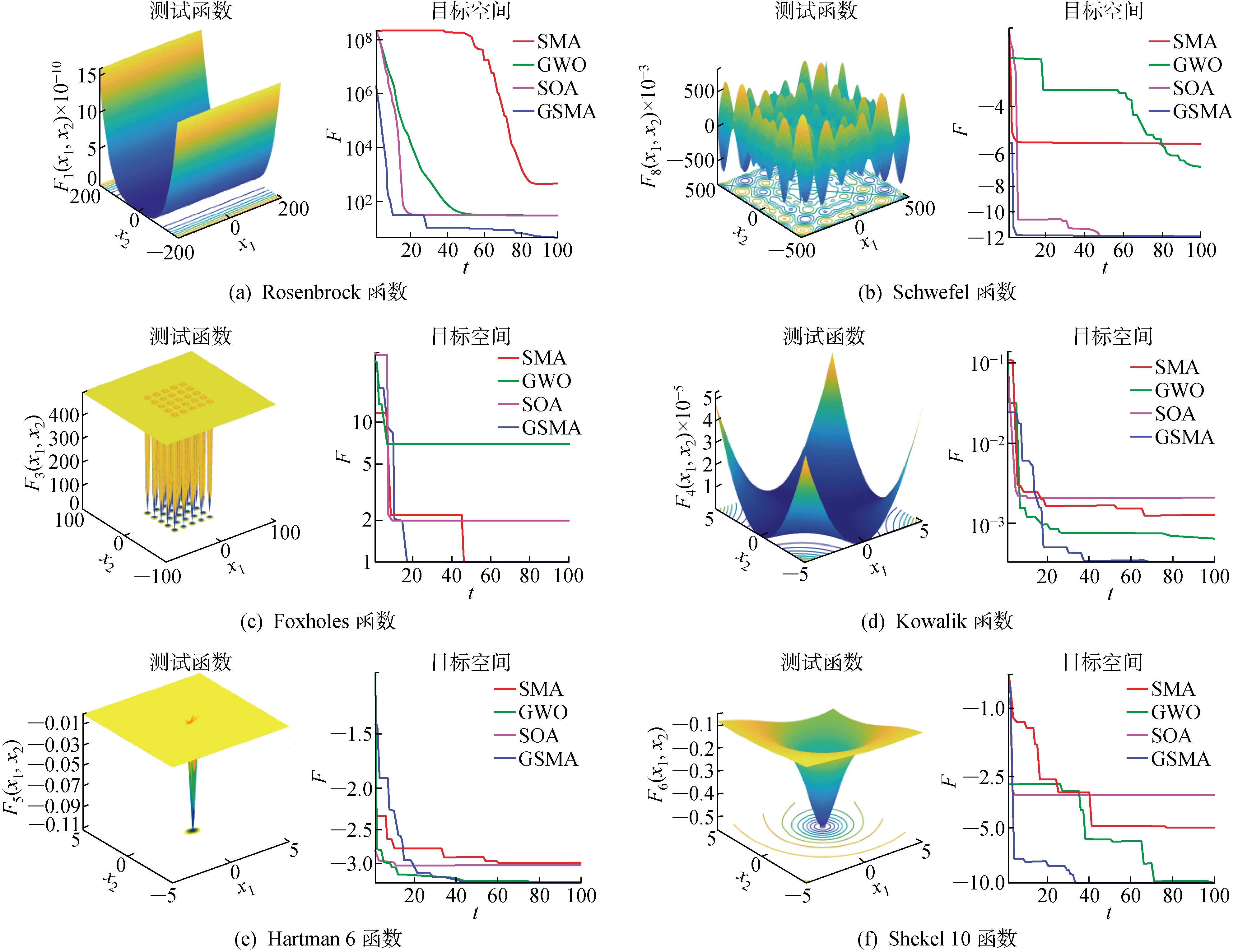
表1
4种算法在测试函数上的实验对比
| 测试函数 | 算法 | Fbest | Favg |
|---|---|---|---|
| Rosenbrock | SMA | 28.63 | 28.98 |
| GWO | 28.17 | 28.34 | |
| SOA | 29.67 | 29.93 | |
| GSMA | 27.89 | 28.15 | |
| Schwefel | SMA | -1.22×104 | -1.31×104 |
| GWO | -5.66×103 | -5.61×103 | |
| SOA | -5.66×103 | -5.66×103 | |
| GSMA | -1.26×104 | -1.32×104 | |
| Foxholes | SMA | 0.068 | 0.153 8 |
| GWO | 2.699 | 2.981 | |
| SOA | 0.928 | 0.563 | |
| GSMA | 0.076 | 0.095 | |
| Kowalik | SMA | 1.28×10-3 | 1.71×10-3 |
| GWO | 2.04×10-3 | 2.43×10-3 | |
| SOA | 2.04×10-3 | 2.12×10-3 | |
| GSMA | 6.34×10-4 | 6.97×10-4 | |
| Hartman 6 | SMA | -3.11 | -3.19 |
| GWO | -3.17 | -3.75 | |
| SOA | -2.65 | -2.82 | |
| GSMA | -3.16 | -3.27 | |
| Shekel 10 | SMA | -3.75 | -3.63 |
| GWO | -10.50 | -10.46 | |
| SOA | -4.87 | -4.87 | |
| GSMA | -10.56 | -10.53 |
表2
主要建模参数
| 参数 | 数值 |
|---|---|
| v/(km·h-1) | 30~40 |
| KZ | 100 |
| K'Z | 100 |
| KF | 100 |
| kd | 0.6 |
| kg/(km·s-2) | 5 |
| Qh | 10 |
| Qv | 10 |
| amax | 60 |
| βmax | 60 |
| Kthr | Rmax,p/3 |
| ω1 | 0.23 |
| ω2 | 0.45 |
| ω3 | 0.2 |
| ω4 | 0.12 |
| d | 15 |

图5
地形1仿真结果图
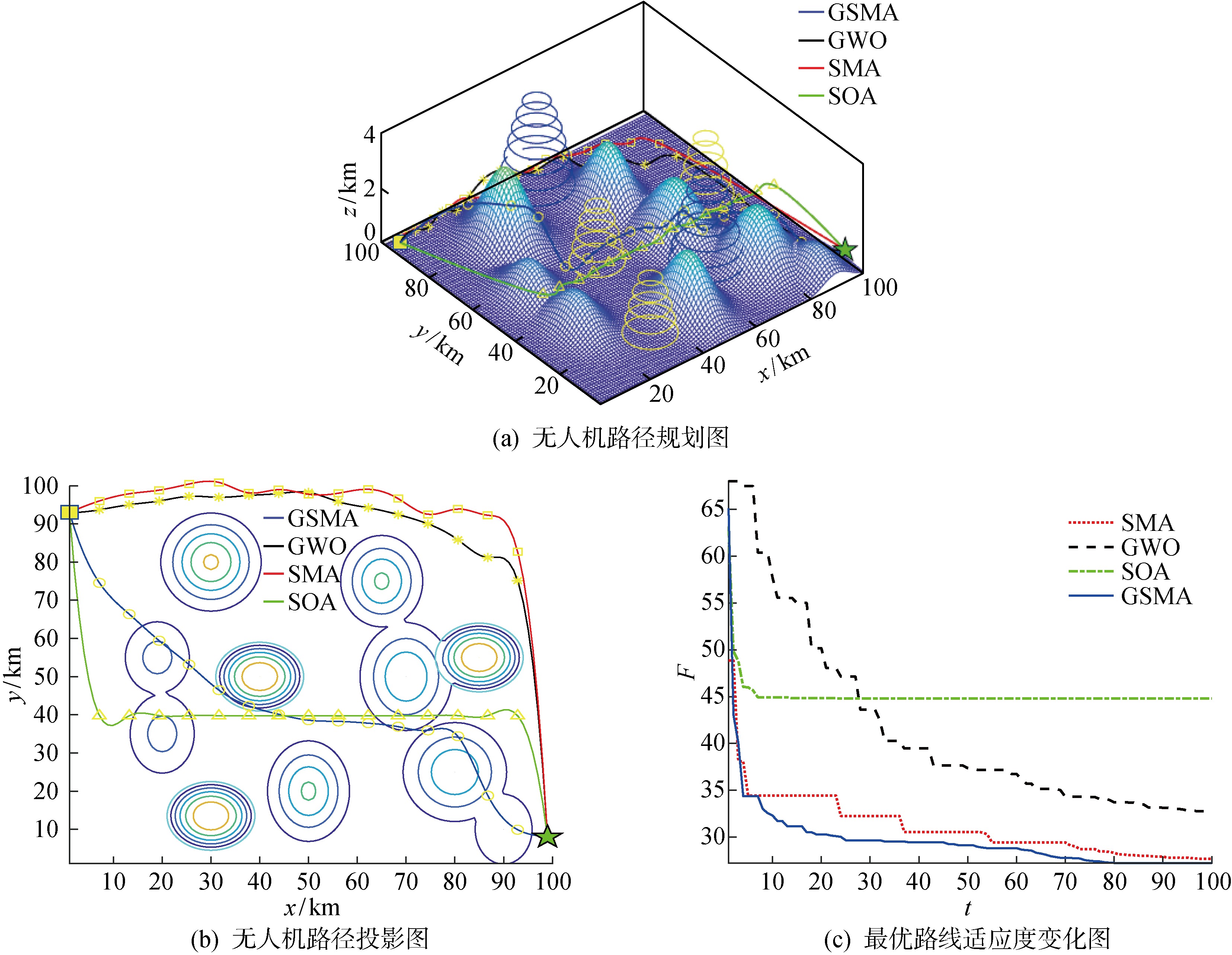

图6
地形2仿真结果图

表3
地形1仿真结果统计
| 算法 | 航程/km | 最优适应度 | 转弯和 爬升角代价 | 寻优 成功率/% |
|---|---|---|---|---|
| SMA | 166.23 | 30.86 | 100 | 76 |
| GWO | 159.38 | 34.09 | 70 | 79 |
| SOA | 162.17 | 36.72 | 120 | 82 |
| GSMA | 133.54 | 29.43 | 10 | 95 |
表4
地形2仿真结果统计
| 算法 | 航程/km | 最优 适应度 | 转弯和 爬升角代价 | 寻优 成功率/% |
|---|---|---|---|---|
| SMA | 165.43 | 27.06 | 100 | 85 |
| GWO | 163.85 | 34.37 | 80 | 78 |
| SOA | 171.65 | 37.78 | 90 | 75 |
| GSMA | 139.86 | 28.89 | 20 | 93 |
| [1] |
EVDOKIMENKOV V N, KRASILSHCHIKOV M N, LYAPIN N A. Guaranteeing UAV trajectory control when approaching a maneuvering air target[J]. Journal of Computer and Systems Sciences International, 2018, 57(5): 789-800.
doi: 10.1134/S1064230718050040 |
| [2] |
GALYAEV A A, LYSENKO P V, YAKHNO V P. 2D optimal trajectory planning problem in threat environment for UUV with non-uniform radiation pattern[J]. Sensors, 2021, 21(2): 396.
doi: 10.3390/s21020396 URL |
| [3] |
GUO Y, LIU X, ZHANG W, et al. 3D path planning method for UAV based on improved artificial potential field[J]. Journal of Northwestern Polytechnical University, 2020, 38(5): 977-986.
doi: 10.1051/jnwpu/20203850977 URL |
| [4] | MANDLOI D, ARYA R, VERMA A K. Unmanned aerial vehicle path planning based on A* algorithm and its variants in 3D environment[J]. International Journal of Systems Assurance Engineering and Management, 2021(1): 1-11. |
| [5] |
LIU X H, ZHANG D, ZHAN J, et al. A path planning method based on the particle swarm optimization trained fuzzy neural network algorithm[J]. Cluster Computing, 2021, 24(3): 1901-1915.
doi: 10.1007/s10586-021-03235-1 |
| [6] |
SOUNDARYA M S, ANUSHA D K, ROHITH P, et al. Optimal path planning of UAV using grey wolf optimiser[J]. International Journal of Computational Systems Engineering, 2019, 5(3): 129-136.
doi: 10.1504/IJCSYSE.2019.10022445 URL |
| [7] | 黄鹤, 李潇磊, 杨澜, 等. 引入改进蝠鲼觅食优化算法的水下无人航行器三维路径规划[J]. 西安交通大学学报, 2022, 56(7): 9-18. |
| HUANG He, LI Xiaolei, YANG Lan, et al. 3D path planning for unmanned underwater vehicles using improved manta foraging optimization algorithm[J]. Journal of Xi’an Jiaotong University, 2022, 56(7): 9-18. | |
| [8] | 王翼虎, 王思明. 基于改进粒子群算法的无人机路径规划[J]. 计算机工程与科学, 2020, 42(9): 1690-1696. |
| WANG Yihu, WANG Siming. UAV path planning based on improved particle swarm optimization[J]. Computer Engineering and Science, 2020, 42(9): 1690-1696. | |
| [9] |
黄书召, 田军委, 乔路, 等. 基于改进遗传算法的无人机路径规划[J]. 计算机应用, 2021, 41(2): 390-397.
doi: 10.11772/j.issn.1001-9081.2020060797 |
| HUANG Shuzhao, TIAN Junwei, QIAO Lu, et al. UAV path planning based on improved genetic algorithm[J]. Computer Application, 2021, 41(2): 390-397. | |
| [10] | 吴坤, 谭劭昌. 基于改进鲸鱼优化算法的无人机航路规划[J]. 航空学报, 2020, 41(Sup.2): 107-114. |
| WU Kun, TAN Shaochang. UAV route planning based on improved whale optimization algorithm[J]. Aeronautical Journal, 2020, 41 (Sup.2): 107-114. | |
| [11] |
LI S, CHEN H, WANG M, et al. Slime mould algorithm: A new method for stochastic optimization[J]. Future Generation Computer Systems. 2020, 111(1): 300-323.
doi: 10.1016/j.future.2020.03.055 URL |
| [12] | 肖亚宁, 孙雪. 基于混沌精英黏菌算法的无刷直流电机转速控制[J]. 科学技术与工程, 2021, 50(28): 4-5. |
| XIAO Yaning, SUN Xue. Brushless DC motor speed control based on chaotic elite slime mould algorithm[J]. Science Technology and Engineering, 2021, 50(28): 4-5. | |
| [13] |
高文欣, 刘升, 肖子雅, 等. 柯西变异和自适应权重优化的蝴蝶算法[J]. 计算机工程与应用, 2020, 56(15): 43-50.
doi: 10.3778/j.issn.1002-8331.1907-0048 |
|
GAO Wenxin, LIU Sheng, XIAO Ziya, et al. Butterfly algorithm for Cauchy variation and adaptive weight optimization[J]. Computer Engineering and Applications, 2020, 56(15): 43-50.
doi: 10.3778/j.issn.1002-8331.1907-0048 |
|
| [14] | 郭雨鑫, 刘升, 高文欣, 等. 多策略改进哈里斯鹰优化算法[J]. 微电子学与计算机, 2021, 38(7): 18-24. |
| GUO Yuxin, LIU Sheng, GAO Wenxin, et al. Multi-strategy improved Harris hawk optimization algorithm[J]. Microelectronics and Computer Science, 2021, 38(7): 18-24. | |
| [15] | 王涛. 非线性权重和柯西变异的蝗虫算法[J]. 微电子学与计算机, 2020, 37(5): 82-86. |
| WANG Tao. Locust algorithm for nonlinear weights and Cauchy variation[J]. Microelectronics and Computers, 2020, 37(5): 82-86. | |
| [16] | 王永琦, 江潇潇. 基于混合灰狼算法的机器人路径规划[J]. 计算机工程与科学, 2020, 42(7): 1294-1301. |
| WANG Yongqi, JIANG Xiaoxiao. Robot path planning based on hybrid gray wolf algorithm[J]. Computer Engineering and Science, 2020, 42(7): 1294-1301. | |
| [17] | 岳文静, 孙鹏, 陈志. 基于改进海鸥算法的认知无人机网络频谱分配[J]. 计算机技术与发展, 2021, 31(9): 7-12. |
| YUE Wenjing, SUN Peng, CHEN Zhi. Spectrum allocation for cognitive UAV networks based on improved seagull algorithm[J]. Computer Technology and Development, 2021, 31(9): 7-12. |
| [1] | 周东荣, 陈世海, 蒋哲, 严赛男, 闫瑞海, 高宇. 无人机实景三维建模在“长江口二号”古船整体迁移与保护项目中的应用[J]. 上海交通大学学报, 2023, 57(S1): 20-24. |
| [2] | 黄鹤, 胡凯益, 李战一, 王会峰, 茹锋, 王珺. 融合MCAP和GRTV正则化的无人机航拍建筑物图像去雾方法[J]. 上海交通大学学报, 2023, 57(3): 366-378. |
| [3] | 罗统, 张民, 梁承宇. 多无人机协同目标跟踪制导律设计[J]. 空天防御, 2023, 6(3): 113-118. |
| [4] | 裘柯钧, 鲍中凯, 陈璐. 民用客机总装车间自动引导车任务分配及路径规划[J]. 上海交通大学学报, 2023, 57(1): 93-102. |
| [5] | . 基于栅格图特征点提取下的蚁群算法路径规划[J]. J Shanghai Jiaotong Univ Sci, 2023, 28(1): 86-99. |
| [6] | 黄宇昊, 韩超, 赵明辉, 杜乾坤, 王石刚. 考虑安全飞行通道约束的无人机飞行轨迹多目标优化策略[J]. 上海交通大学学报, 2022, 56(8): 1024-1033. |
| [7] | 李登攀, 任晓明, 颜楠楠. 基于无人机航拍的绝缘子掉串实时检测研究[J]. 上海交通大学学报, 2022, 56(8): 994-1003. |
| [8] | 聂瑞, 王红茹. 基于神经网络观测器的无人机编队执行器故障诊断[J]. 空天防御, 2022, 5(2): 32-41. |
| [9] | 罗菁, 张逸楠. 基于改进Grey-AHP的察打一体无人机作战效能评估方法[J]. 空天防御, 2022, 5(2): 1-7. |
| [10] | 周齐贤, 王寅, 孙学安. 基于增益自适应超螺旋滑模理论的无人机控制[J]. 上海交通大学学报, 2022, 56(11): 1453-1460. |
| [11] | 郭鹏军, 张睿, 高关根, 许斌. 基于相对速度和位置辅助的无人机编队协同导航[J]. 上海交通大学学报, 2022, 56(11): 1438-1446. |
| [12] | 李伟湋, 高培雪, 陈进, 路玉卿. 基于累积前景理论和三支决策的无人机态势评估[J]. 上海交通大学学报, 2022, 56(11): 1479-1490. |
| [13] | 陈禹伊, 陈璐. 车辆路径规划问题的逆向优化方法[J]. 上海交通大学学报, 2022, 56(1): 81-88. |
| [14] | 王克帆, 邱潇颀, 高长生, 荆武兴. 临近空间太阳能无人机横航向变质心控制技术[J]. 空天防御, 2021, 4(4): 29-36. |
| [15] | 李昭莹, 欧一鸣, 石若凌. 基于深度Q网络的改进RRT路径规划算法[J]. 空天防御, 2021, 4(3): 17-23. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||