上海交通大学学报 ›› 2022, Vol. 56 ›› Issue (11): 1438-1446.doi: 10.16183/j.cnki.jsjtu.2022.232
郭鹏军1, 张睿1, 高关根2, 许斌1( )
)
收稿日期:2022-06-21
出版日期:2022-11-28
发布日期:2022-12-02
通讯作者:
许斌
E-mail:smlieface.binxu@gmail.com
作者简介:郭鹏军(1996-),男,陕西省咸阳市人,博士生,从事无人机集群导航研究.
基金资助:
GUO Pengjun1, ZHANG Rui1, GAO Guangen2, XU Bin1()
Received:2022-06-21
Online:2022-11-28
Published:2022-12-02
Contact:
XU Bin
E-mail:smlieface.binxu@gmail.com
摘要:
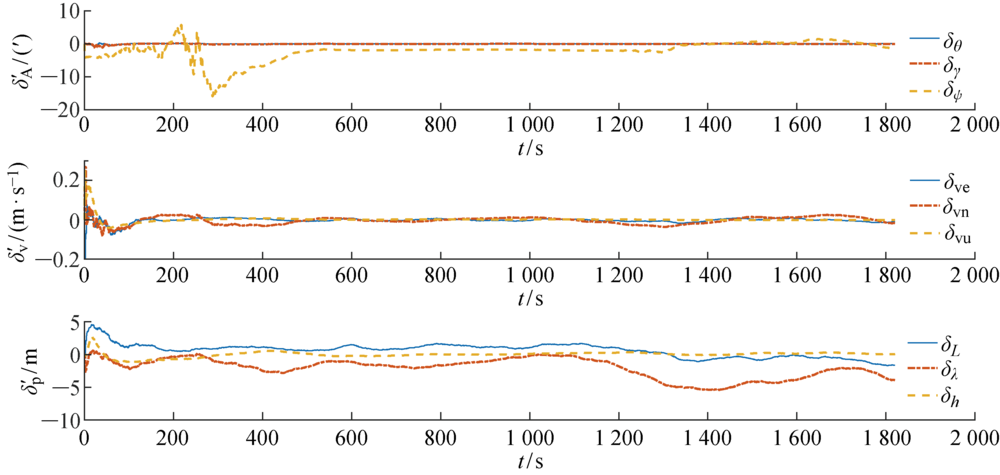
惯性导航系统的误差随时间累积,仅依靠惯性导航系统进行定位的无人机编队无法在长航时飞行中获取高精度导航信息.针对这一问题,面向主从式无人机编队提出一种协同导航方案.首先,在无人机上配置相对导航传感器,测量主从无人机编队成员之间的相对速度和相对位置信息;其次,考虑编队成员之间的相对位姿,研究空间统一转换方案,将编队各成员依靠惯性导航系统测量的绝对导航信息与相对传感器测量的相对导航信息统一到同一导航坐标系下;最后,给出基于相对速度和相对位置辅助的协同导航方案.30 min仿真结果表明,采取该方案后,从机各方向上的速度和位置误差分别收敛至0.1 m/s和5 m,证实该方案相较于惯性导航系统更适用于长航时飞行场景.
中图分类号:
郭鹏军, 张睿, 高关根, 许斌. 基于相对速度和位置辅助的无人机编队协同导航[J]. 上海交通大学学报, 2022, 56(11): 1438-1446.
GUO Pengjun, ZHANG Rui, GAO Guangen, XU Bin. Cooperative Navigation of UAV Formation Based on Relative Velocity and Position Assistance[J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1438-1446.
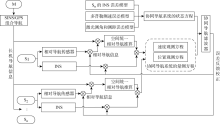
图1
无人机协同导航方案框图


图2
僚机b系下相对导航矢量
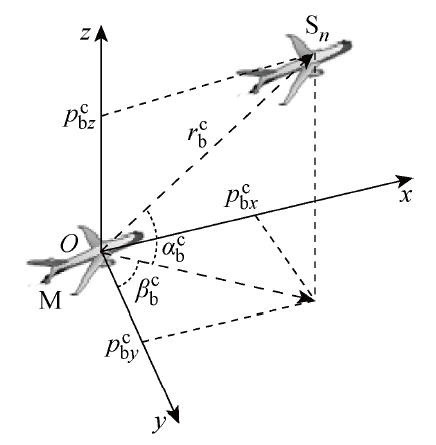
表1
相对导航传感器配置
| 参数 | 数值 |
|---|---|
| 多普勒安装角误差/(') | (15, 10, 12) |
| 多普勒刻度系数误差/% | (0.8, 0.8, 0.8) |
| 激光测速白噪声均方根/(m·s-1) | (0.05, 0.05, 0.05) |
| 激光测距刻度系数误差/% | 0.5 |
| 激光测距白噪声均方根/m | 0.5 |
| 激光测角白噪声均方根/(°) | 0.1 |
表2
编队成员导航参数配置
| 参数 | M | Sn |
|---|---|---|
| 初始位置 (相对参考点)/m | (-200, 0, 40) | S1(0,-100, 0) S2(0, 100, 0) S3(0, 0, 25) |
| 初始速度/(m·s-1) | (0, 0, 0) | (0, 0, 0) |
| 初始姿态/(°) | (0, 0, 90) | (0, 0, 90) |
| 陀螺零偏/[(°)·h-1] | 0.002 | 0.02 |
| 角度随机游走/[(°)·h-0.5] | 0.001 | 0.01 |
| 加速度计零偏/mg | 0.02 | 0.1 |
| 速度随机游走/(mg·h-0.5) | 0.01 | 0.05 |
| GPS定位误差/m | 5 | 无GPS |
图3
长机和僚机真实轨迹
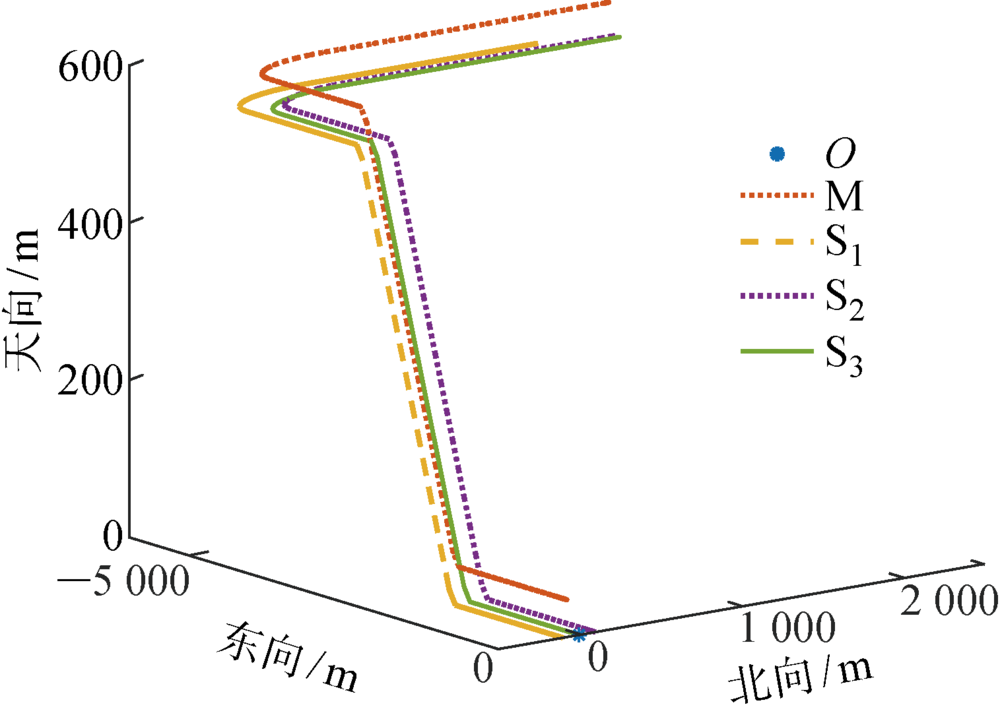
图4
僚机S1惯性导航解算误差
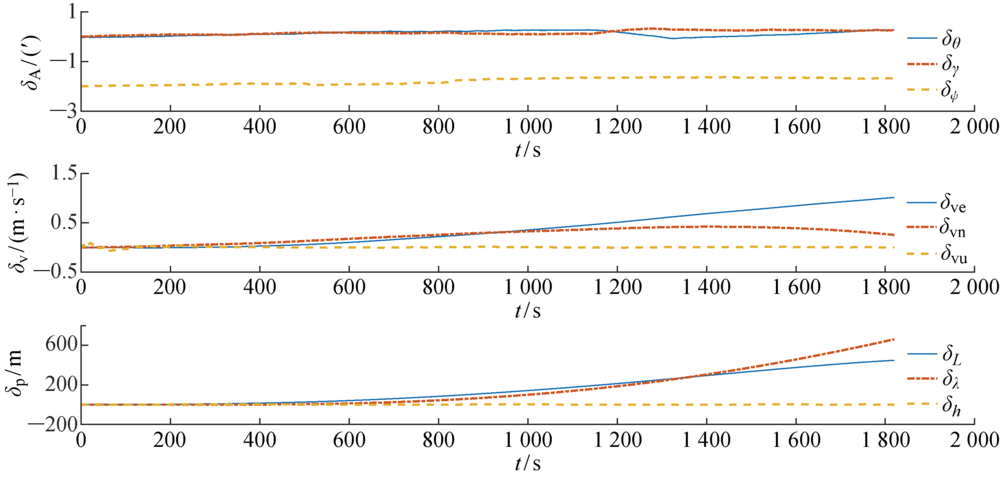
图5
僚机S2惯性导航解算误差

图6
僚机S3惯性导航解算误差
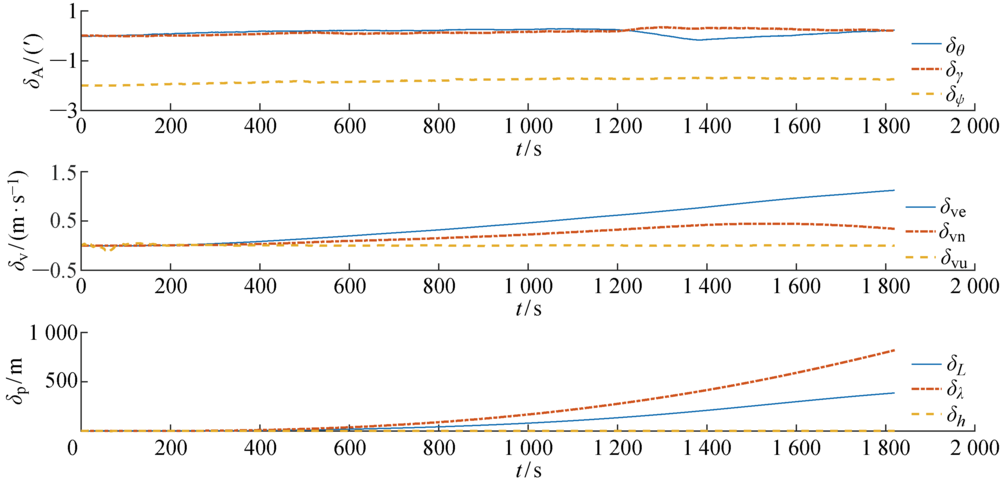
图7
僚机S1协同导航误差


图8
僚机S2协同导航误差
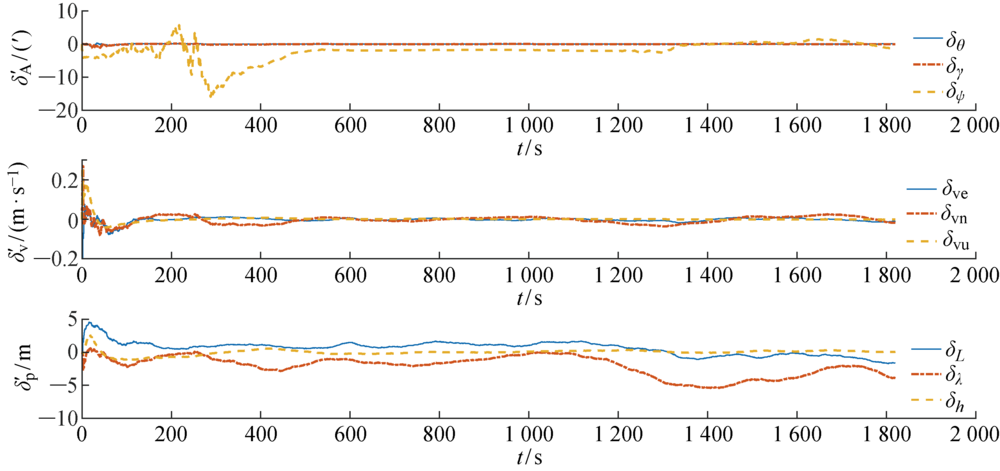
图9
僚机S3协同导航误差
| [1] | 武成锋, 程进, 郭晓云, 等. 飞行器集群协同定位与导航对抗技术发展与展望[J]. 宇航学报, 2022, 43(2): 131-142. |
| WU Chengfeng, CHENG Jin, GUO Xiaoyun, et al. Development and prospect of aircraft clusters cooperative positioning and navigation countermeasures technology[J]. Journal of Astronautics, 2022, 43(2): 131-142. | |
| [2] |
XIONG J, CHEONG J W, XIONG Z, et al. Hybrid cooperative positioning for vehicular networks[J]. IEEE Transactions on Vehicular Technology, 2020, 69(1): 714-727.
doi: 10.1109/TVT.2019.2953687 URL |
| [3] | XING X J, GUI H R, MA Z, et al. Multi-source fault tolerant integrated navigation for a certain UAV based on INS/BD/RP/TAN[C]∥2019 IEEE 15th International Conference on Control and Automation. Edinburgh, UK: IEEE, 2019: 313-318. |
| [4] | 徐博, 白金磊, 郝燕玲, 等. 多AUV协同导航问题的研究现状与进展[J]. 自动化学报, 2015, 41(3): 445-461. |
| XU Bo, BAI Jinlei, HAO Yanling, et al. The research status and progress of cooperative navigation for multiple AUVs[J]. Acta Automatica Sinica, 2015, 41(3): 445-461. | |
| [5] | 李鹏, 阮晓钢, 朱晓庆, 等. 基于深度强化学习的区域化视觉导航方法[J]. 上海交通大学学报, 2021, 55(5): 575-585. |
| LI Peng, RUAN Xiaogang, ZHU Xioaqing, et al. A regionalization vision navigation method based on deep reinforcement learning[J]. Journal of Shanghai Jiao Tong University, 2021, 55(5): 575-585. | |
| [6] | 刘晓洋, 徐胜红. 无人机编队分层式协同导航仿真研究[J]. 计算机仿真, 2020, 36(10): 44-48. |
| LIU Xiaoyang, XU Shenghong. Simulation research on hierarchical cooperative navigation of UAV formation[J]. Computer Simulation, 2020, 36(10): 44-48. | |
| [7] |
MOHIUDDIN A, TAREK T, ZWEIRI Y, et al. A survey of single and multi-UAV aerial manipulation[J]. Unmanned Systems, 2020, 8(2): 119-147.
doi: 10.1142/S2301385020500089 URL |
| [8] | 曲法义, 王小刚, 崔乃刚, 等. 基于惯导/GPS/视觉的无人机容错相对导航方法[J]. 中国惯性技术学报, 2013, (6): 781-785. |
| QU Fayi, WANG Xiaogang, CUI Naigang, et al. Fault-tolerance relative navigation approach based on SINS/GPS/Vision for UAV[J]. Journal of Chinese Inertial Technology, 2013, (6): 781-785. | |
| [9] |
TOMIC S, BEKO M, DINIS R, et al. Distributed algorithm for target localization in wireless sensor networks using RSS and AoA measurements[J]. Pervasive and Mobile Computing, 2017, 37: 63-77.
doi: 10.1016/j.pmcj.2016.09.013 URL |
| [10] | 谷旭平, 唐大全. 基于联邦滤波算法的无人机集群分层协同导航[J]. 系统工程与电子技术, 2022, 44(3): 967-976. |
| GU Xuping, TANG Daquan. Hierarchical cooperative navigation of UAV swarm based on federated filtering algorithm[J]. Systems Engineering and Electronics, 2022, 44(3): 967-976. | |
| [11] | 郭继峰, 郑红星, 贾涛, 等. 异构无人系统协同作战关键技术综述[J]. 宇航学报, 2020, 41(6): 686-696. |
| GUO Jifeng, ZHENG Hongxing, JIA Tao, et al. Summary of key technologies for heterogeneous unmanned system cooperative operations[J]. Journal of Astronautics, 2020, 41 (6): 686-696. | |
| [12] | 潘瑞鸿, 徐胜红. 基于几何特性的多无人机协同导航算法[J]. 兵器装备工程学报, 2017, 38(10): 55-59. |
| PAN Ruihong, XU Shenghong. Multi-UAV cooperative navigation algorithm based on geometric characteristics[J]. Journal of Ordnance Equipment Engineering, 2017, 38(10): 55-59. | |
| [13] | XU H, WANG L Q, ZHANG Y C, et al. Decentralized visual-inertial-UWB fusion for relative state estimation of aerial swarm[C]∥2020 IEEE International Conference on Robotics and Automation. Paris, France: IEEE, 2020: 8776-8782. |
| [14] | 陈超. UAV进近阶段组合导航信息融合方案设计[J]. 电光与控制, 2020, 27(2): 79-84. |
| CHEN Chao. Design of an information fusion scheme for integrated navigation of UAVs in approaching stage[J]. Electronics Optics & Control, 2020, 27(2): 79-84. | |
| [15] | 秦永元. 惯性导航[M]. 第二版. 北京: 科学出版社, 2014. |
| QIN Yongyuan. Inertial navigation[M]. 2nd ed. Beijing: Science Press, 2014. |
| [1] | 黄宇昊, 韩超, 赵明辉, 杜乾坤, 王石刚. 考虑安全飞行通道约束的无人机飞行轨迹多目标优化策略[J]. 上海交通大学学报, 2022, 56(8): 1024-1033. |
| [2] | 李登攀, 任晓明, 颜楠楠. 基于无人机航拍的绝缘子掉串实时检测研究[J]. 上海交通大学学报, 2022, 56(8): 994-1003. |
| [3] | 罗菁, 张逸楠. 基于改进Grey-AHP的察打一体无人机作战效能评估方法[J]. 空天防御, 2022, 5(2): 1-7. |
| [4] | 聂瑞, 王红茹. 基于神经网络观测器的无人机编队执行器故障诊断[J]. 空天防御, 2022, 5(2): 32-41. |
| [5] | 李伟湋, 高培雪, 陈进, 路玉卿. 基于累积前景理论和三支决策的无人机态势评估[J]. 上海交通大学学报, 2022, 56(11): 1479-1490. |
| [6] | 周齐贤, 王寅, 孙学安. 基于增益自适应超螺旋滑模理论的无人机控制[J]. 上海交通大学学报, 2022, 56(11): 1453-1460. |
| [7] | 王克帆, 邱潇颀, 高长生, 荆武兴. 临近空间太阳能无人机横航向变质心控制技术[J]. 空天防御, 2021, 4(4): 29-36. |
| [8] | 吴诗辉, 贾军, 鲍然, 周宇, 夏青元. 面向集群对抗的多弹协同目标分配模型与仿真分析[J]. 空天防御, 2021, 4(3): 1-9. |
| [9] | 姚天成, 赵永生, 王红雨, 何炎平, 丁子龙, 池哲瀛, 蔡炜锴. 风光混合驱动长航程无人海空立体探测船研发[J]. 上海交通大学学报, 2021, 55(2): 215-220. |
| [10] | 王晓军, 管宇锋. 基于TOPSIS法和仿真法的反集群无人机装备体系贡献率研究[J]. 空天防御, 2021, 4(1): 33-40. |
| [11] | 李征, 陈建伟, 彭博. 基于伪谱法的无人机集群飞行路径规划[J]. 空天防御, 2021, 4(1): 52-59. |
| [12] | 刘晨, 谢宝娣, 董国宝, 霍达, 段雨昕, 夏川. 基于自适应积分滑模的无人机编队控制器设计[J]. 空天防御, 2021, 4(1): 65-70. |
| [13] | 王程, 倪旖, 李亮, 郭正勇, 陈兵. 针对小型商业无人机的预警技术发展现状与思考[J]. 空天防御, 2021, 4(1): 83-90. |
| [14] | 梁烽杨, 杨毅钧, 刘功龙, 万兵, 高王升. 多无人机系统协同侦察规划算法研究[J]. 空天防御, 2021, 4(1): 103-108. |
| [15] | 刘西, 李贤, 陈伟, 从光涛, 李如飞. 基于NSGA-Ⅲ算法的多目标分配方法研究[J]. 空天防御, 2021, 4(1): 109-116. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||