上海交通大学学报 ›› 2021, Vol. 55 ›› Issue (2): 215-220.doi: 10.16183/j.cnki.jsjtu.2020.352
所属专题: 《上海交通大学学报》2021年“交通运输工程”专题; 《上海交通大学学报》2021年12期专题汇总专辑
• 创新设计 • 上一篇
姚天成a, 赵永生a( ), 王红雨b, 何炎平a, 丁子龙a, 池哲瀛a, 蔡炜锴a
), 王红雨b, 何炎平a, 丁子龙a, 池哲瀛a, 蔡炜锴a
收稿日期:2020-10-10
出版日期:2021-02-01
发布日期:2021-03-03
通讯作者:
赵永生
E-mail:yongsheng@sjtu.edu.cn
作者简介:姚天成(1997-),男,江苏省南通市人,硕士生,现主要从事无人船和风力机研究.
YAO Tianchenga, ZHAO Yongshenga(), WANG Hongyub, HE Yanpinga, DING Zilonga, CHI Zheyinga, CAI Weikaia
Received:2020-10-10
Online:2021-02-01
Published:2021-03-03
Contact:
ZHAO Yongsheng
E-mail:yongsheng@sjtu.edu.cn
摘要:
针对现有无人海洋探测船续航时间短,在复杂海洋环境干扰下易发生传感器失效导致感知能力受限等问题,研发了一种风能太阳能混合驱动的长航程无人海空立体探测船.开发了升降式的导管型高效低风速风力机和可展式的太阳能光伏发电系统,利用风能和太阳能实现了混合能源动力供给,克服了单一能源供电的不稳定性,有效保证无人探测船的续航能力;开发了可自主起降的艇载系留无人机系统,结合船载和机载传感器信息融合技术,大幅提升了无人船对周围环境的感知能力,具有了海空立体探测功能.该无人探测船可根据任务场景搭载不同负载设备执行指定任务.
中图分类号:
姚天成, 赵永生, 王红雨, 何炎平, 丁子龙, 池哲瀛, 蔡炜锴. 风光混合驱动长航程无人海空立体探测船研发[J]. 上海交通大学学报, 2021, 55(2): 215-220.
YAO Tiancheng, ZHAO Yongsheng, WANG Hongyu, HE Yanping, DING Zilong, CHI Zheying, CAI Weikai. Development of a Hybrid Solar and Wind-Powered Long-Range Unmanned Ocean Stereo Exploration Vessel[J]. Journal of Shanghai Jiao Tong University, 2021, 55(2): 215-220.
表1
CWind主要技术参数
| 指标 | 参数信息 |
|---|---|
| 发电方式 | 风能+太阳能(总功率360 W) |
| 续航 | 受实际环境影响,理论无限 |
| 航速 | 额定3 kn,最大6 kn |
| 排水量/kg | 120 |
| 负载能力/kg | 50 |
| 船型 | 双体 |
| 推进形式 | 双推进器差速推进 |
| 海况等级 | 工作海况2级,生存海况3级 |
| 船体尺寸(长×宽×吃水深度) | 2.3 m×1.3 m×0.125 m |
| 通信 | 遥控(5 km)、基站(10 km)或卫星通信 |
| 无人机飞行高度/m | 100(最大) |
| 无人机负载/kg | 1(标准) |
| 配备 | 基于任务的各类负载设备 |

图1
CWind主要系统组成
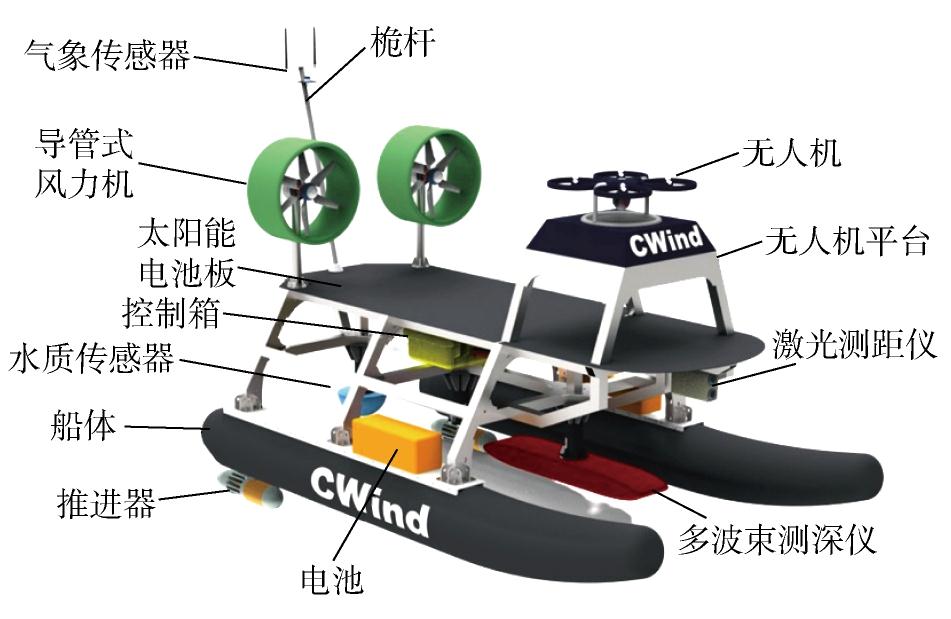

图2
CWind混合动力系统
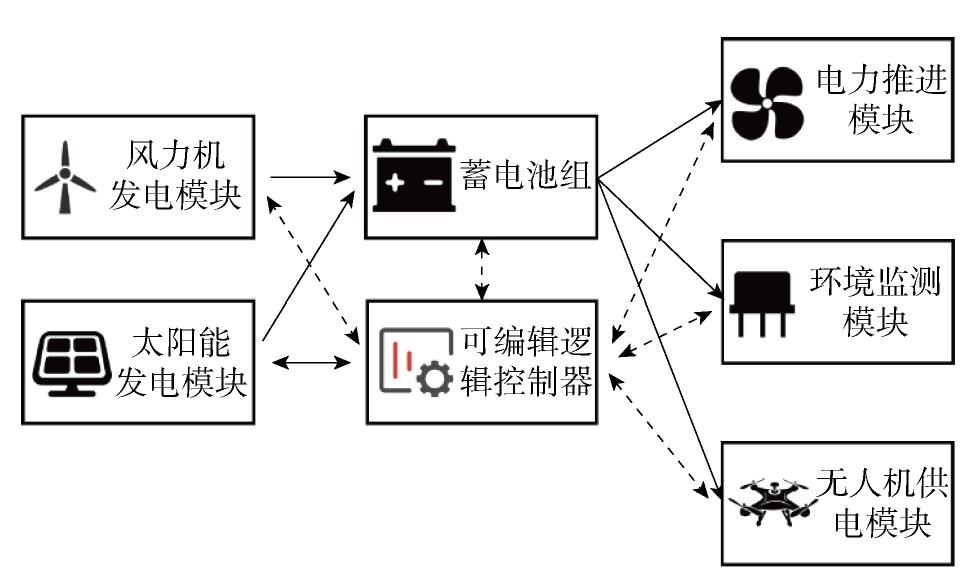

图3
无人机桅杆系统
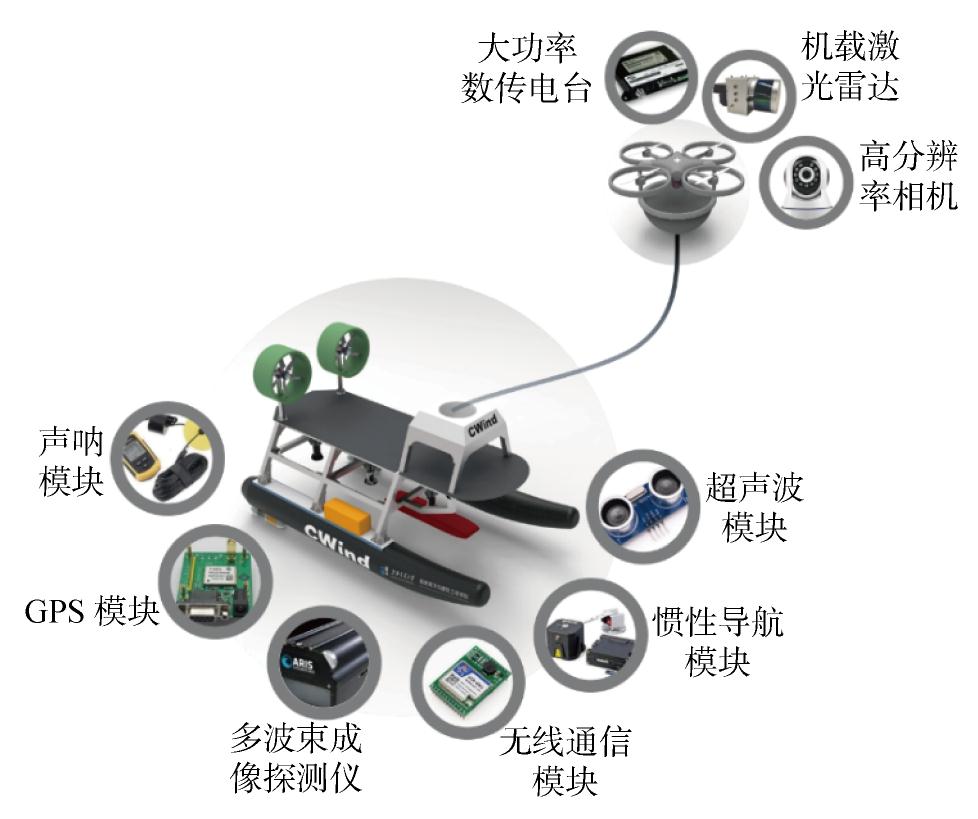
表2
无人机主要参数
| 指标 | 参数 |
|---|---|
| 船载无人机轴距/mm | 450 |
| 船载无人机载重能力/kg | 1 |
| 系留线缆长度/m | 110 |
| 巡航高度/m | 5~100 |
| 艇载系留无人机跟随误差/m | <0.5 |
图4
海空立体探测系统
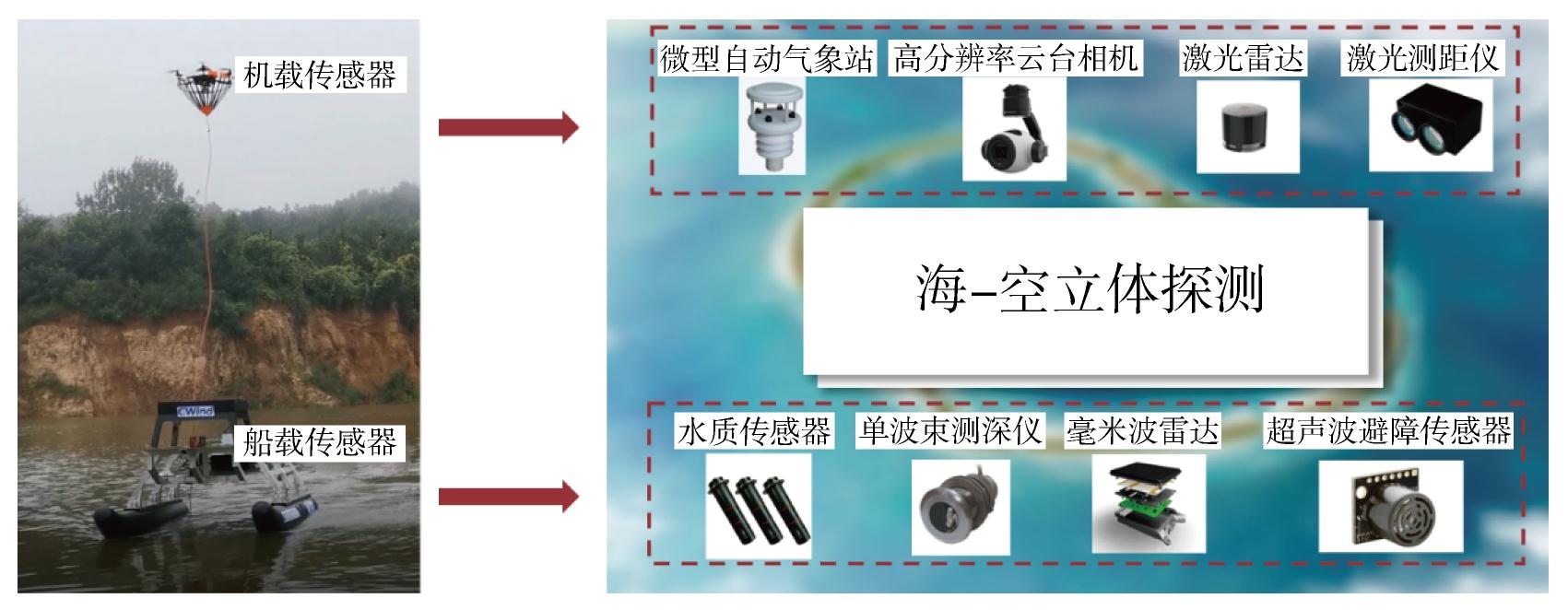
图5
无人机在无人船六自由度运动条件下的自主降落
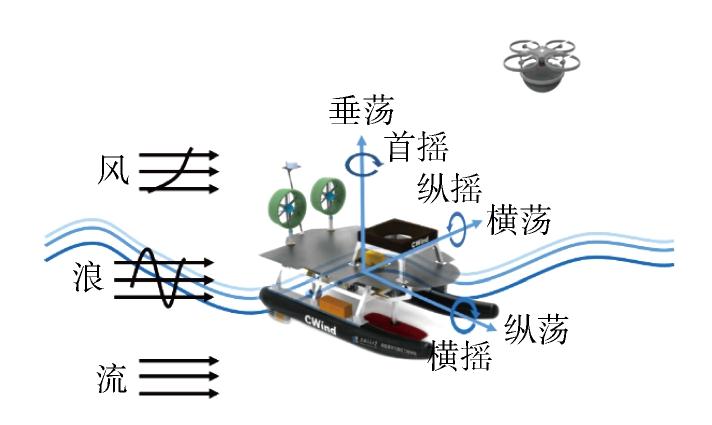
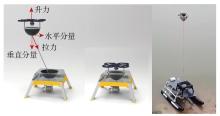
图6
无人机降落控制原理
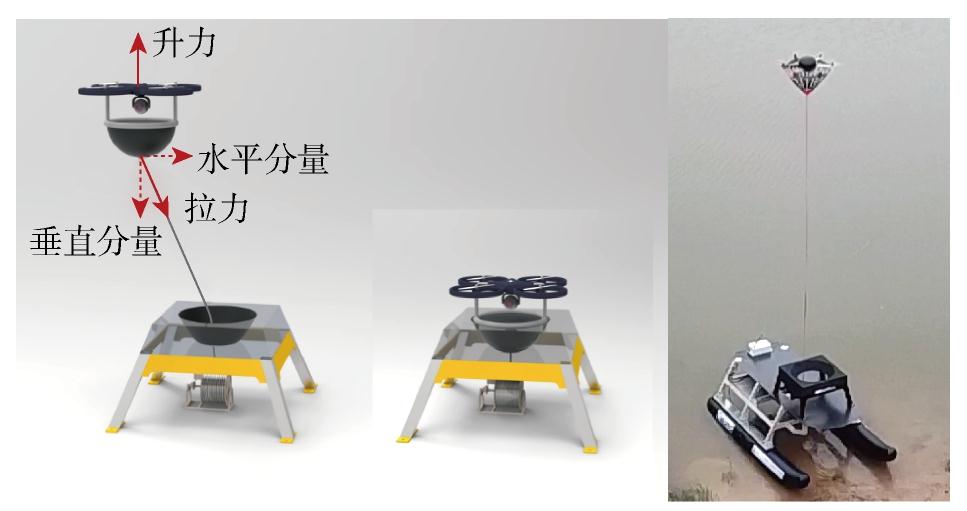
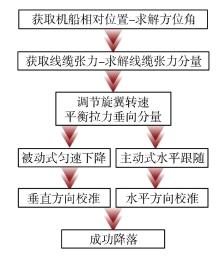
图7
无人机自主降落控制流程

图8
导管式小型风力机
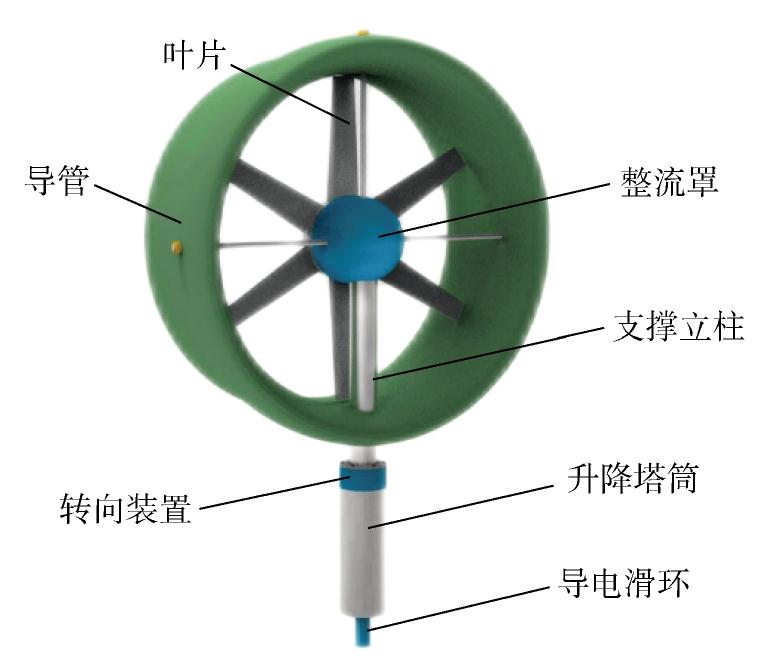

图9
计算域及导管式风力机表面网格
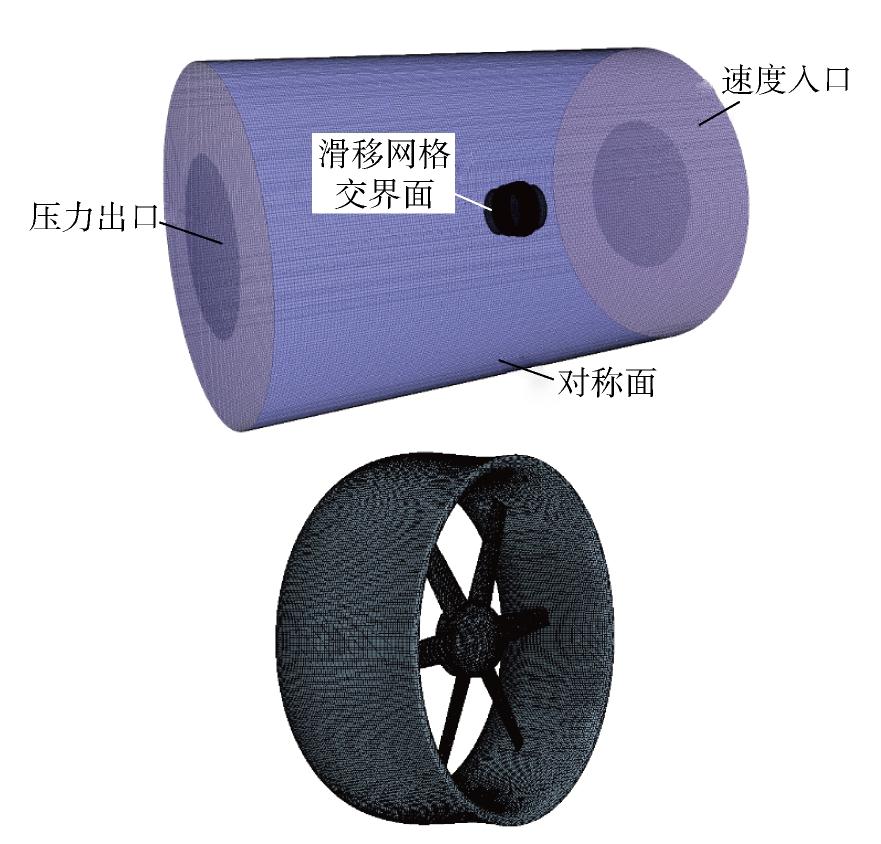

图10
风力机尾涡对比
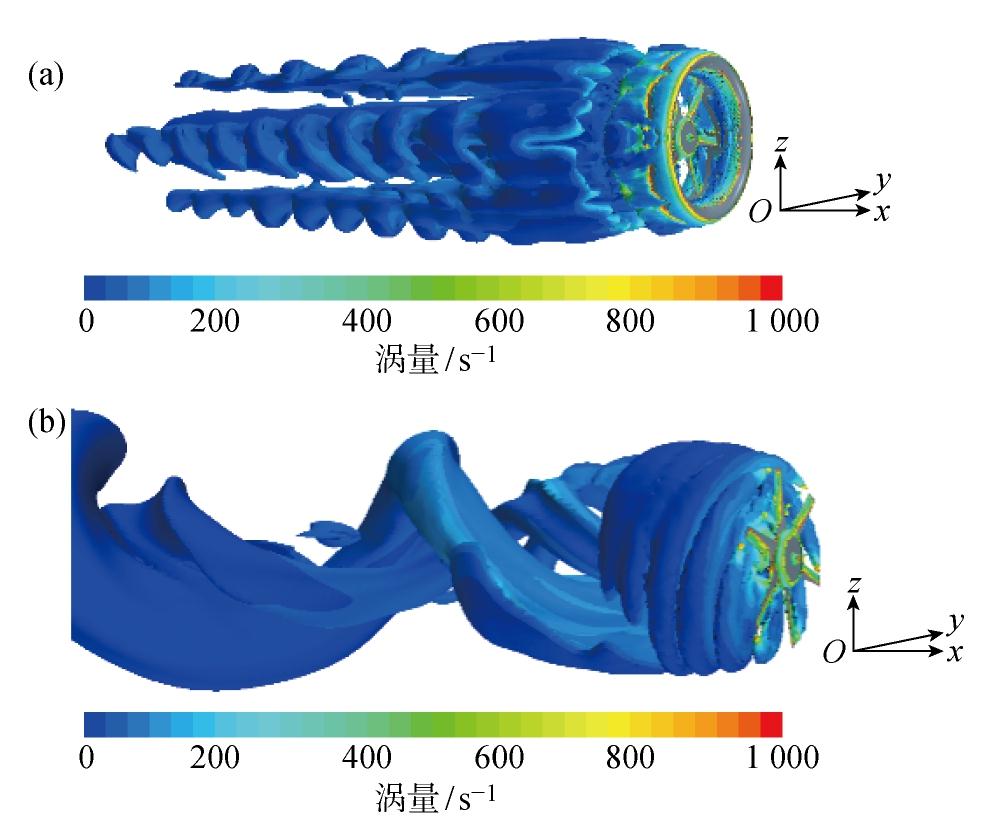
表3
CFD计算工况及结果
| 风速/(m·s-1) | 风轮转速/(r·min-1) | 无导管推力/N | 有导管推力/N | 无导管转矩/(N·m) | 有导管转矩/(N·m) | 功率提升 |
|---|---|---|---|---|---|---|
| 3 | 800 | 0.295 | 0.334 | -2.853×10-4 | 4.942×10-4 | 可启动 |
| 15 | 1 000 | 7.363 | 7.455 | 15.064 | 16.046 | 6.523% |
| 15 | 1 600 | 7.577 | 7.990 | 29.733 | 37.396 | 25.773% |
| [1] | 晏洋. 无人船、无人机在太湖水域搜救应急应用[J]. 交通企业管理,2020, 35(4): 89-91. |
| YAN Yang. Application of unmanned ship and UAV in search and rescue in Lake Taihu[J]. Transportation Enterprise Management, 2020, 35(4): 89-91. | |
| [2] | 宋杰,闻佳. 无人船技术在海事的应用[J]. 中国海事,2015(10): 47-50. |
| SONG Jie, WEN Jia. The application of unmanned vessel technology in maritime domain[J]. China Maritime Safety, 2015(10): 47-50. | |
| [3] | 赵建虎,欧阳永忠,王爱学. 海底地形测量技术现状及发展趋势[J]. 测绘学报,2017, 46(10): 1786-1794. |
| ZHAO Jianhu, OUYANG Yongzhong, WANG Aixue. Status and development tendency for seafloor terrain measurement technology[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(10): 1786-1794. | |
| [4] | 金久才,张杰,邵峰,等. 一种海洋环境监测无人船系统及其海洋应用[J]. 海岸工程,2015, 34(3): 87-92. |
| JIN Jiucai, ZHANG Jie, SHAO Feng, et al. An unmanned surface vehicle for ocean environment monitoring and its oceanic application[J]. Coastal Engineering, 2015, 34(3): 87-92. | |
| [5] | 蒲进菁,刘涵,江云华,等. 无人船现状及发展趋势综述[J]. 海洋信息,2020, 35(1): 6-11. |
| PU Jinjing, LIU Han, JIANG Yunhua, et al. Summary of the status and development trends of unmanned surface vehicle[J]. Marine Information, 2020, 35(1): 6-11. | |
| [6] | 陈映彬. 无人船发展现状及其关键技术综述[J]. 科学技术创新,2019(2): 60-61. |
| CHEN Yingbin. The development status and summary of key technologies of unmanned surface vehicle[J]. Scientific and Technological Innovation, 2019(2): 60-61. | |
| [7] | 曹娟,王雪松. 国内外无人船发展现状及未来前景[J]. 中国船检,2018(5): 94-97. |
| CAO Juan, WANG Xuesong. Development status and future prospects of unmanned ships at home and abroad[J]. China Ship Survey, 2018(5): 94-97. | |
| [8] | YAN R J, PANG S, SUN H B, et al. Development and missions of unmanned surface vehicle[J]. Journal of Marine Science and Application, 2010, 9(4): 451-457. |
| [9] | 张强,张晓宇,米豪鼎,等. 一种多动力驱动海上综合观测平台: CN111252204A[P]. 2020-06-09[2020-10-18]. |
| ZHANG Qiang, ZHANG Xiaoyu, MI Haoding, et al. Multi-power driving marine comprehensive observation platform: CN111252204A[P]. 2020-06-09[2020-10-18]. | |
| [10] | 武建国,赵基伟,忻加成,等. 一种风光互补驱动水面无人艇: CN110091976A[P]. 2019-08-06[2020-10-18]. |
| WU Jianguo, ZHAO Jiwei, XIN Jiacheng, et al. Wind-solar complementary driving surface unmanned boat: CN110091976A [P]. 2019-08-06[2020-10-18]. | |
| [11] | 冬雷,邵立伟. 一种新型风光互补供能无人帆船及其控制方法: CN205738030U[P]. 2016-11-30[2020-10-18]. |
| DONG Lei, SHAO Liwei. Novel wind-solar complementary energy-supply unmanned sailboat and control method: CN205738030U[P]. 2016-11-30[2020-10-18]. | |
| [12] | 路骏,黄建新,肖寒,等. 系留无人机精准起降设备: CN111516895A[P]. 2020-08-11[2020-10-18]. |
| LU Jun, HUANG Jianxin, XIAO Han, et al. Precise take-off and landing equipment for tethered UAV: CN111516895A[P]. 2020-08-11[2020-10-18]. | |
| [13] | 钟毅,王文靖,汪俊澎,等. 无人船与无人机协同控制监控方法、装置及系统: CN109991386A[P]. 2019-07-09[2020-10-18]. |
| ZHONG Yi, WANG Wenjing, WANG Junpeng, et al. Cooperative control monitoring method, device and system for unmanned ship and unmanned aerial vehicle: CN109991386A[P]. 2019-07-09[2020-10-18]. | |
| [14] | 周海峰,张桂玲,许大光,等. 无人船无人机协作系统及控制方法: CN109774960A[P]. 2019-05-21[2020-10-18]. |
| ZHOU Haifeng, ZHANG Guiling, XU Daguang, et al. Unmanned ship drone cooperation system and control method: CN109774960A[P]. 2019-05-21[2020-10-18]. | |
| [15] | 赵文一. 无人机视觉辅助自主降落系统研究[D]. 哈尔滨: 哈尔滨工业大学,2018. |
| ZHAO Wenyi. Research on vision-based autonomous landing system of UAV[D]. Harbin: Harbin Institute of Technology, 2018. | |
| [16] | 高翔. 基于机载嵌入式平台的无人机视觉辅助自主降落[D]. 哈尔滨: 哈尔滨工业大学,2016. |
| GAO Xiang. Vision-assisted auto landing of UAV with onboard embedded system[D]. Harbin: Harbin Institute of Technology, 2016. | |
| [17] | CHEN Z, HE Y P, ZHAO Y S, et al. High-order redesign method for wind turbine blade optimization in model test considering aerodynamic similarity[J]. Ocean Engineering, 2020, 202: 107156. |
| [1] | 于特, 王磊. 基于协同控制的自重构平台算法及试验验证[J]. 上海交通大学学报, 2021, 55(11): 1493-1498. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||