上海交通大学学报 ›› 2022, Vol. 56 ›› Issue (11): 1427-1437.doi: 10.16183/j.cnki.jsjtu.2022.190
所属专题: 《上海交通大学学报》2022年“制导、导航与控制”专题; 制导、导航与控制
• 制导、导航与控制 • 下一篇
杨庶1, 钱云霄1, 杨婷1,2( )
)
收稿日期:2022-06-01
出版日期:2022-11-28
发布日期:2022-12-02
通讯作者:
杨婷
E-mail:yangtingszc@163.com
作者简介:杨 庶(1988-),男,江苏省徐州市人,副教授,从事飞行力学与飞行控制研究.
基金资助:
YANG Shu1, QIAN Yunxiao1, YANG Ting1,2()
Received:2022-06-01
Online:2022-11-28
Published:2022-12-02
Contact:
YANG Ting
E-mail:yangtingszc@163.com
摘要:
针对高超声速飞行器的三维航迹控制问题,采用线性变参数(LPV)输出反馈控制和极点配置理论,基于高度-水平航迹控制概念,在马赫数包线内设计高超声速飞行器一体化式LPV控制律.该控制律不区分常规飞行控制律的内外控制回路,根据速度、高度、侧滑角和偏航角指令对飞行器纵向和横航向运动进行综合控制,在L2诱导范数意义下实现飞行器三维航迹的鲁棒最优控制.在地心地固参考系内建立高超声速飞行器的数学模型,考虑地球自转、地球扁率、地球引力二阶简谐效应对飞行器运动特性的影响.通过数值仿真检验LPV控制律的控制性能,仿真结果表明:高超声速飞行器闭环系统具有D-稳定性,能够在典型机动中保持良好的航迹控制性能,并且在扰动和测量噪声下具有良好的鲁棒性.
中图分类号:
杨庶, 钱云霄, 杨婷. 高超声速飞行器线性变参数一体化式控制律设计[J]. 上海交通大学学报, 2022, 56(11): 1427-1437.
YANG Shu, QIAN Yunxiao, YANG Ting. Linear Parameter-Varying Integrated Control Law Design for a Hypersonic Vehicle[J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1427-1437.
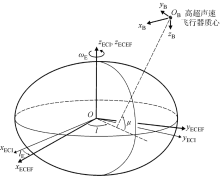
图1
ECEF参考系与机体参考系示意图
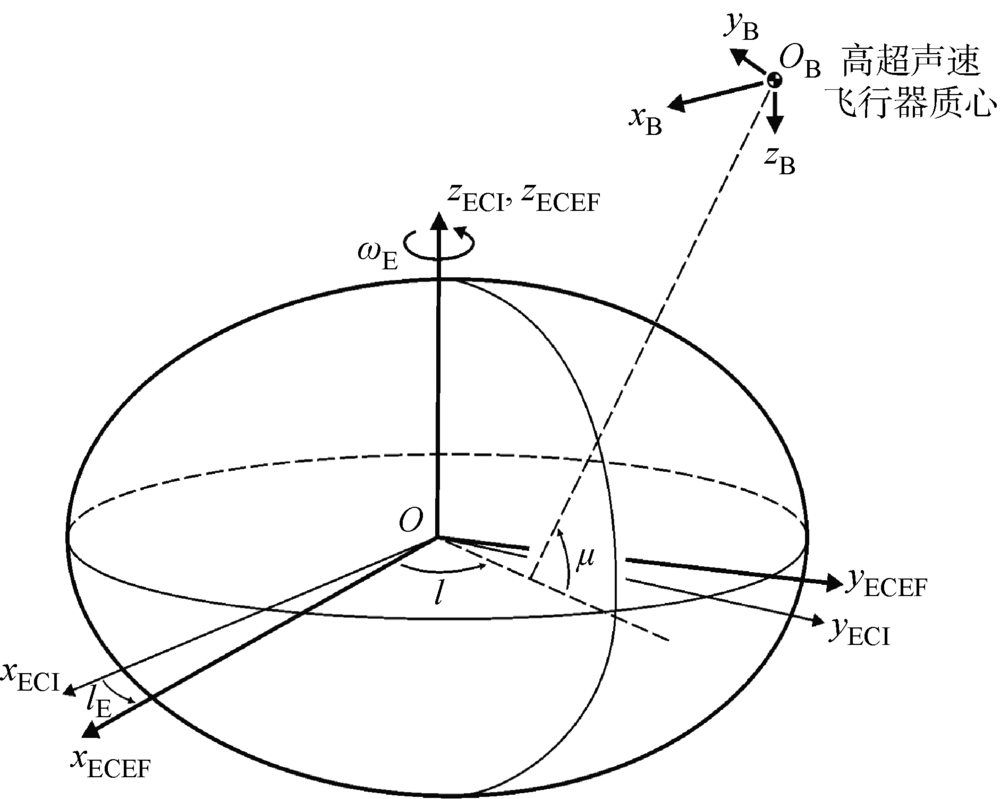
图2
高度-水平航迹控制概念示意图
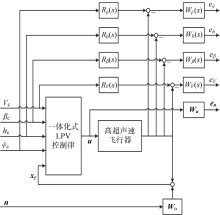
图3
LPV控制律与系统连接结构
图4
高超声速飞行器开环和闭环系统极点分布
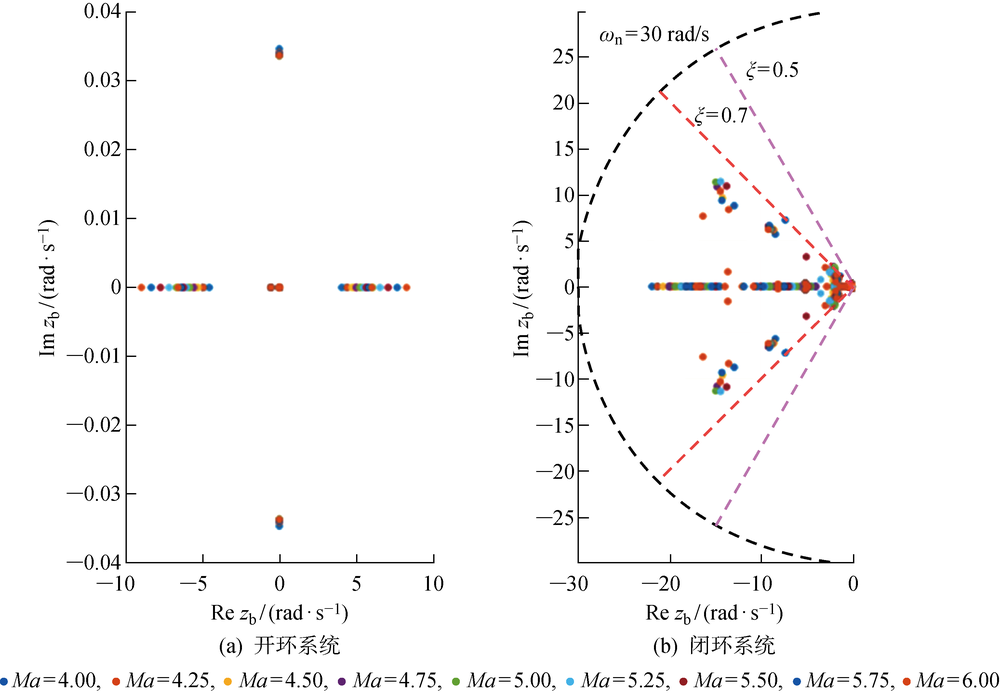

图5
控制指令与系统响应(跃升加速机动)
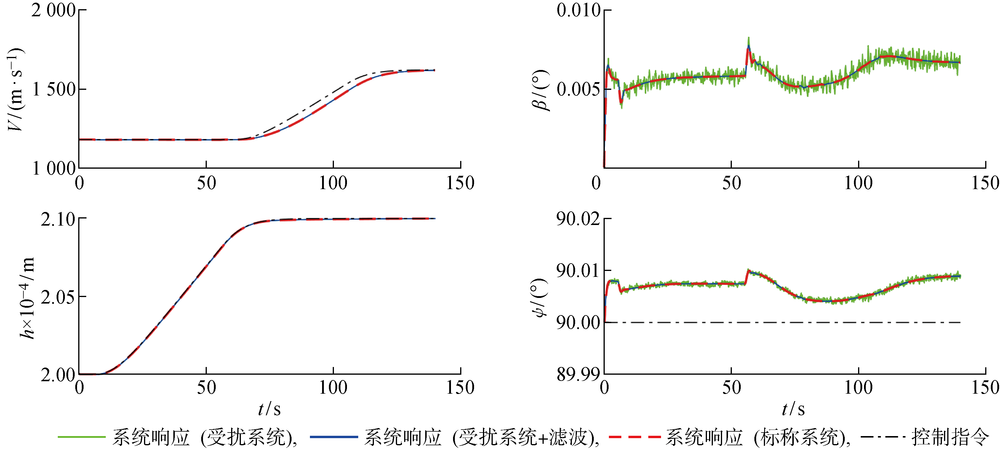

图6
ECEF参考系下高超声速飞行器运动方程的状态响应(跃升加速机动)
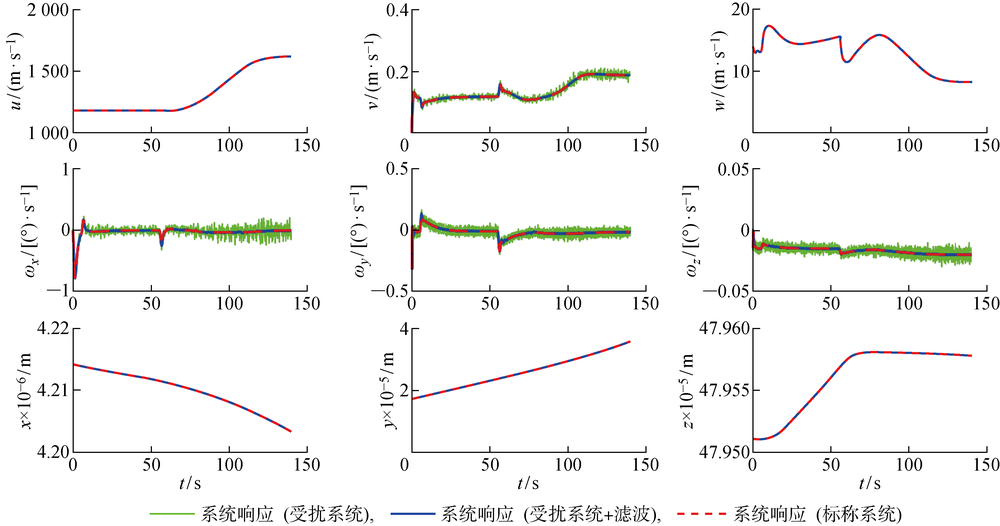
图7
ECEF参考系下高超声速飞行器的姿态四元数响应(跃升加速机动)
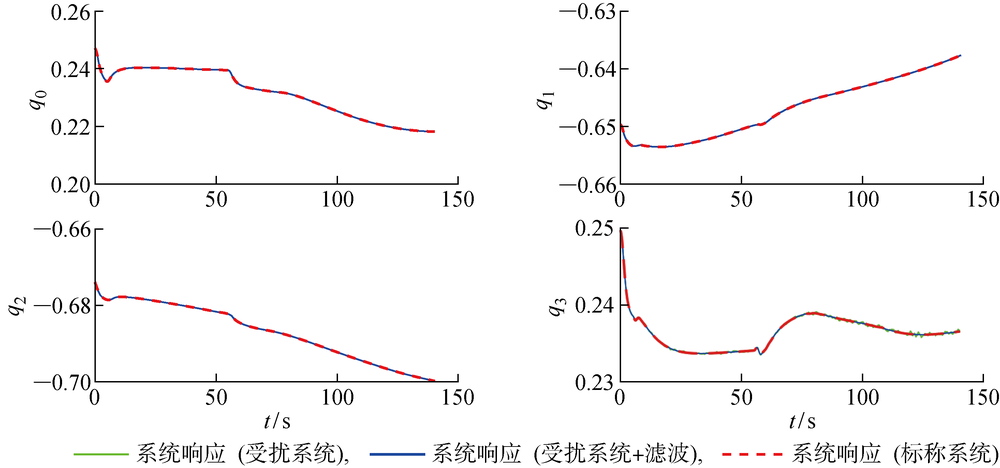

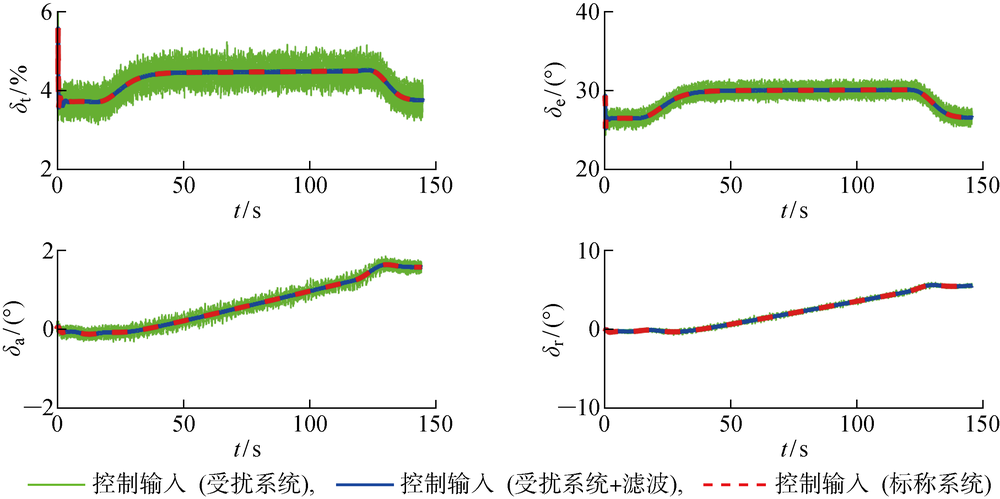
图8
控制输入(跃升加速机动)
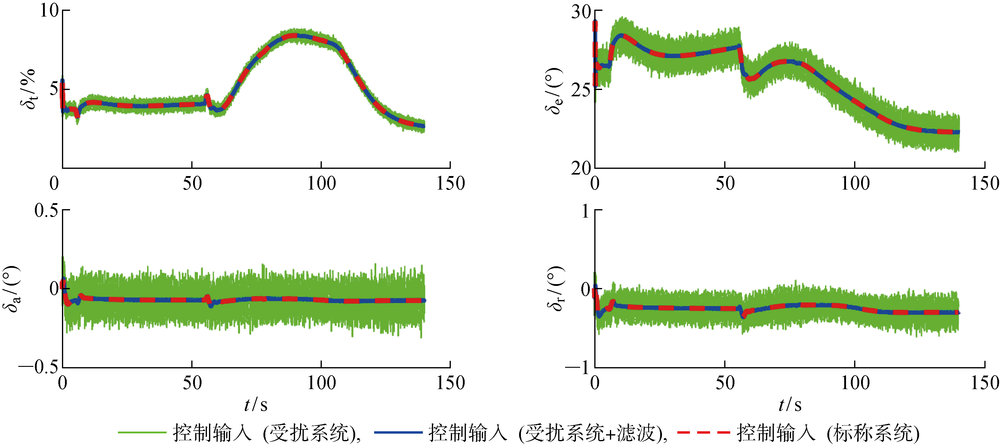

图9
控制指令与系统响应(水平转弯机动)
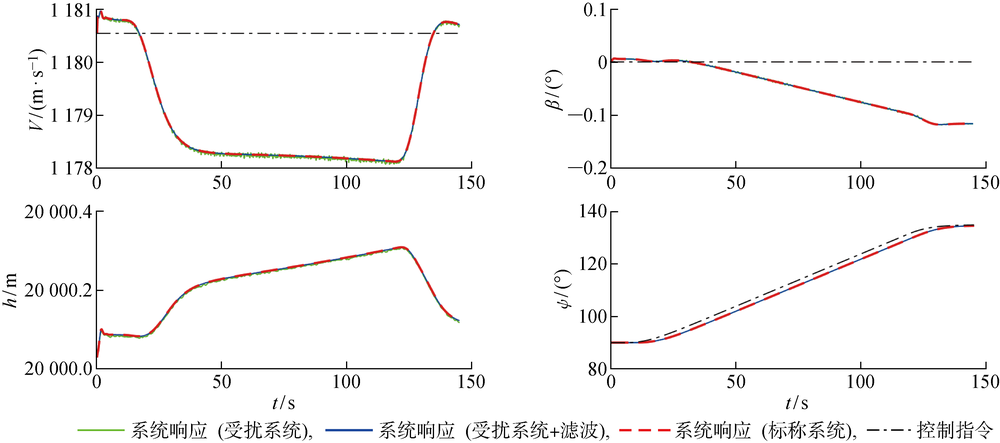
图10
ECEF参考系下高超声速飞行器运动方程的状态响应(水平转弯机动)
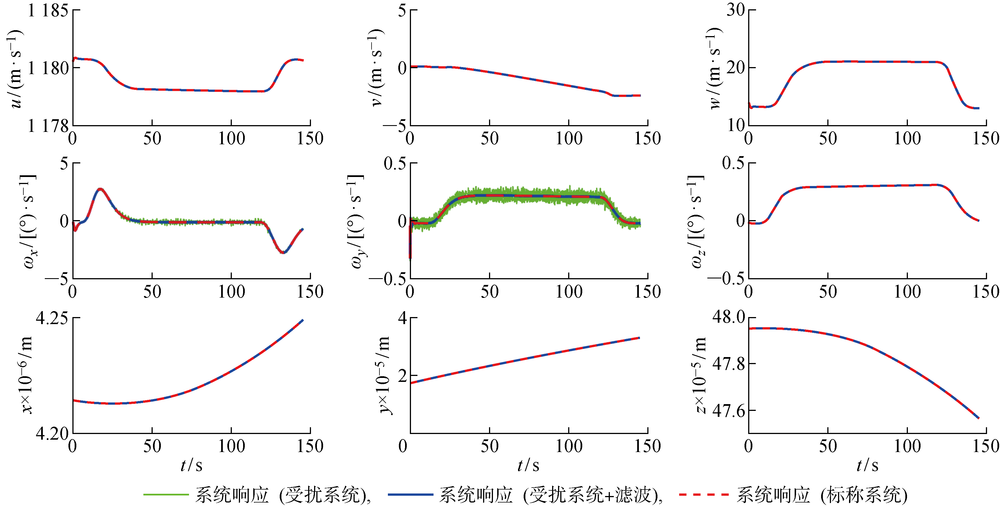
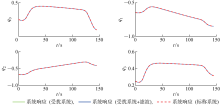
图11
ECEF参考系下高超声速飞行器的姿态四元数响应(水平转弯机动)


图12
控制输入(水平转弯机动)
| [1] | 刘晓东, 黄万伟, 王丹晔, 等. 带终端角度约束的飞行器三维制导控制一体化设计[J]. 航天控制, 2016, 34(2): 3-8. |
| LIU Xiaodong, HUANG Wanwei, WANG Danye, et al. Aircraft three-dimensional integrated guidance and control design containing terminal angle constraints[J]. Aerospace Control, 2016, 34(2): 3-8. | |
| [2] | 路遥, 贾志强, 刘晓东, 等. 高超声速飞行器无在线求导backstepping 控制方法[J]. 宇航学报, 2022, 43(1): 103-110. |
| LU Yao, JIA Zhiqiang, LIU Xiaodong, et al. Backstepping control for hypersonic vehicles without online differentiation[J]. Journal of Astronautics, 2022, 43(1): 103-110. | |
| [3] | 秦伟伟, 郑志强, 刘刚, 等. 高超声速飞行器的LPV鲁棒变增益控制[J]. 系统工程与电子技术, 2011, 33(6): 1327-1331. |
| QIN Weiwei, ZHENG Zhiqiang, LIU Gang, et al. Robust variable gain control for hypersonic vehicles based on LPV[J]. Systems Engineering and Electronics, 2011, 33(6): 1327-1331. | |
| [4] | 张健松, 马清华, 黎海青, 等. 高超声速飞行器鲁棒纵向控制技术研究[J]. 弹箭与制导学报, 2020, 40(2): 19-22. |
| ZHANG Jiansong, MA Qinghua, LI Haiqing, et al. Robust longitudinal control method for hypersonic vehicle[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2020, 40(2): 19-22. | |
| [5] |
BU X W, QI Q. Fuzzy optimal tracking control of hypersonic flight vehicles via single-network adaptive critic design[J]. IEEE Transactions on Fuzzy Systems, 2022, 30(1): 270-278.
doi: 10.1109/TFUZZ.2020.3036706 URL |
| [6] | 唐博, 席建祥, 刘太阳, 等. 俯冲段高超声速飞行器有限时间协同制导律设计[J]. 北京航空航天大学学报, 2021, 47(10): 2105-2117. |
| TANG Bo, XI Jianxiang, LIU Taiyang, et al. Design of finite-time cooperative guidance law for hypersonic vehicles in dive phase[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(10): 2105-2117. | |
| [7] |
WANG J H, CHENG L, CAI Y W, et al. Low-order diving integrated guidance and control for hypersonic vehicles[J]. Aerospace Science and Technology, 2019, 91: 96-109.
doi: 10.1016/j.ast.2019.04.045 URL |
| [8] | BAO C Y, WANG P, TANG G J. Integrated guidance and control for hypersonic morphing missile based on variable span auxiliary control[J]. International Journal of Aerospace Engineering, 2019, 2019: 6413410. |
| [9] |
蔡光斌, 赵阳, 张胜修, 等. 高超声速飞行器鲁棒多目标线性变参数控制[J]. 兵工学报, 2019, 40(11): 2229-2240.
doi: 10.3969/j.issn.1000-1093.2019.11.007 |
|
CAI Guangbin, ZHAO Yang, ZHANG Shengxiu, et al. Robust multi-objective linear parameter-varying control for hypersonic vehicle[J]. Acta Armamentarii, 2019, 40(11): 2229-2240.
doi: 10.3969/j.issn.1000-1093.2019.11.007 |
|
| [10] | 黄宜庆, 江岩, 李志琨, 等. 高超声速飞行器的增益调度切换控制[J]. 控制工程, 2019, 26(3): 405-411. |
| HUANG Yiqing, JIANG Yan, LI Zhikun, et al. Output feedback gain-scheduled switching control for hypersonic vehicles[J]. Control Engineering of China, 2019, 26(3): 405-411. | |
| [11] | 郑亚龙, 江驹, 徐文萤. 基于最优选点数的多胞LPV建模及其鲁棒控制研究[J]. 舰船电子工程, 2019, 39(11): 56-60. |
| ZHENG Yalong, JIANG Ju, XU Wenying. Uncertain polytopic LPV modelling based on the number of optimal equilibrium points and robust control[J]. Ship Electronic Engineering, 2019, 39(11): 56-60. | |
| [12] | 黄显林, 葛东明. 吸气式高超声速飞行器纵向机动飞行的鲁棒线性变参数控制[J]. 宇航学报, 2010, 31(7): 1789-1797. |
| HUANG Xianlin, GE Dongming. Robust linear parameter-varying control for longitudinal maneuvering flight of air-breathing hypersonic vehicle[J]. Journal of Astronautics, 2010, 31(7): 1789-1797. | |
| [13] | STEVENS B L, LEWIS F L, JOHNSON E N. Aircraft control and simulation[M]. 3rd ed. Hoboken, USA: John Wiley & Sons, Inc, 2015. |
| [14] | SHAUGHNESSY J D, PINCKNEY S Z, MCMINN J D, et al. Hypersonic vehicle simulation model: Winged-cone configuration[R]. USA: NASA, 1990. |
| [15] | GREENWOOD D T. Advanced dynamics[M]. New York, USA: Cambridge University Press, 2003. |
| [16] |
MARCOS A, BALAS G J. Development of linear-parameter-varying models for aircraft[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(2): 218-228.
doi: 10.2514/1.9165 URL |
| [17] | DULLERUD G E. PAGANINI F G. A course in robust control theory: A convex approach[M]. New York, USA: Springer, 2000. |
| [18] |
APKARIAN P, ADAMS R J. Advanced gain-scheduling techniques for uncertain systems[J]. IEEE Transactions on Control Systems Technology, 1998, 6(1): 21-32.
doi: 10.1109/87.654874 URL |
| [19] |
CHILALI M, GAHINET P. H∞ design with pole placement constraints: An LMI approach[J]. IEEE Transactions on Automatic Control, 1996, 41(3): 358-367.
doi: 10.1109/9.486637 URL |
| [1] | 余水明, 晁涛, 梅铮, 霍炬. 高超声速飞行器防御系统的拦截能力评估研究[J]. 空天防御, 2025, 8(5): 25-30. |
| [2] | 缪雨衡, 李如飞, 鄂斌, 王小刚, 崔乃刚. 基于自适应CPM的高超声速飞行器滑翔弹道优化[J]. 空天防御, 2025, 8(3): 123-131. |
| [3] | 林照晨, 张欣然, 刘紫阳, 贺风华, 欧阳磊. 基于深度学习的高超声速飞行器运动行为识别[J]. 空天防御, 2024, 7(1): 48-55. |
| [4] | 阎宏磊, 陆远, 郭杰, 唐胜景, 李响. 欠驱动高超滑翔飞行器集群协同编队控制方法[J]. 空天防御, 2024, 7(1): 56-62. |
| [5] | 狄子琦, 王翔宇, 吴双, 周宇 . 基于Transformer架构的高超声速飞行器轨迹生成与预测算法[J]. 空天防御, 2023, 6(4): 35-41. |
| [6] | 刘双喜, 刘世俊, 李勇, 闫斌斌, 闫杰. 国外高超声速飞行器及防御体系发展现状[J]. 空天防御, 2023, 6(3): 39-51. |
| [7] | 田若岑, 张庆振, 郭云鹤, 程林. 基于禁飞区规避的高超声速飞行器再入制导律设计[J]. 空天防御, 2022, 5(2): 65-74. |
| [8] | 刘双喜, 王一冲, 朱梦杰, 李勇, 闫斌斌. 小弹目速度比下拦截高超声速飞行器微分对策制导律研究[J]. 空天防御, 2022, 5(2): 49-57. |
| [9] | 毛营忠, 冯智勇, 郭会茹. 考虑多性能约束的车辆主动前轮转向静态输出反馈控制[J]. 上海交通大学学报, 2022, 56(2): 156-164. |
| [10] | 熊俊辉, 李克勇, 刘燚, 吉雨. 临近空间防御技术发展态势及突防策略[J]. 空天防御, 2021, 4(2): 82-86. |
| [11] | 朱金梁, 王婷, 李涛. 基于Wirtinger型积分不等式的线性时滞广义系统稳定性准则[J]. 上海交通大学学报, 2020, 54(9): 967-972. |
| [12] | 罗旭1,张淦胜2,谢巍2. Buck变换器线性参数变化模型的增益调度控制[J]. 上海交通大学学报, 2017, 51(6): 698-703. |
| [13] | 刘芬,陈丽,段登平. 多螺旋桨浮空器的抗饱和控制器设计[J]. 上海交通大学学报, 2017, 51(2): 157-. |
| [14] | 丁健, 杨慧中. 不确定离散线性系统鲁棒单调收敛迭代学习控制[J]. 上海交通大学学报, 2015, 49(11): 1630-1634. |
| [15] | 于永军a,徐锦法a,张梁a,熊智b. 基于改进KAZE特征的合成孔径雷达匹配算法[J]. 上海交通大学学报(自然版), 2015, 49(09): 1288-1292. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||