上海交通大学学报 ›› 2022, Vol. 56 ›› Issue (11): 1453-1460.doi: 10.16183/j.cnki.jsjtu.2022.238
周齐贤, 王寅( ), 孙学安
), 孙学安
收稿日期:2022-06-27
出版日期:2022-11-28
发布日期:2022-12-02
通讯作者:
王寅
E-mail:yinwangee@nuaa.edu.cn
作者简介:周齐贤(1998-),男,江苏省南京市人,硕士生,从事无人机控制研究.
基金资助:
ZHOU Qixian, WANG Yin(), SUN Xuean
Received:2022-06-27
Online:2022-11-28
Published:2022-12-02
Contact:
WANG Yin
E-mail:yinwangee@nuaa.edu.cn
摘要:
以无人机为研究对象,针对无人机系统非线性强和飞行过程中外界干扰产生的不确定性,设计一种基于增益自适应滑模控制的无人机姿态控制器.该方法无需观测器对不确定性进行估计就可以实现对给定无人机姿态的跟踪控制,同时滑模控制中的抖振情况可以得到有效抑制.首先介绍无人机模型,给出其数学模型;其次,以误差为状态量,设计稳定收敛的滑模面,采用增益自适应超螺旋滑模算法设计能够有限时间收敛的无人机姿态控制器;再采用Lyapunov第二法证明闭环无人机系统的稳定性;最后对所提控制方法进行仿真验证.结果表明:该控制方法具有可靠的控制性能.
中图分类号:
周齐贤, 王寅, 孙学安. 基于增益自适应超螺旋滑模理论的无人机控制[J]. 上海交通大学学报, 2022, 56(11): 1453-1460.
ZHOU Qixian, WANG Yin, SUN Xuean. Control of Unmanned Aerial Vehicle Based on Gain Adaptive Super-Twisting Sliding Mode Theory[J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1453-1460.
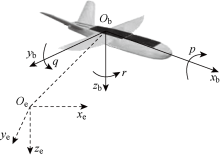
图1
无人机坐标示意图
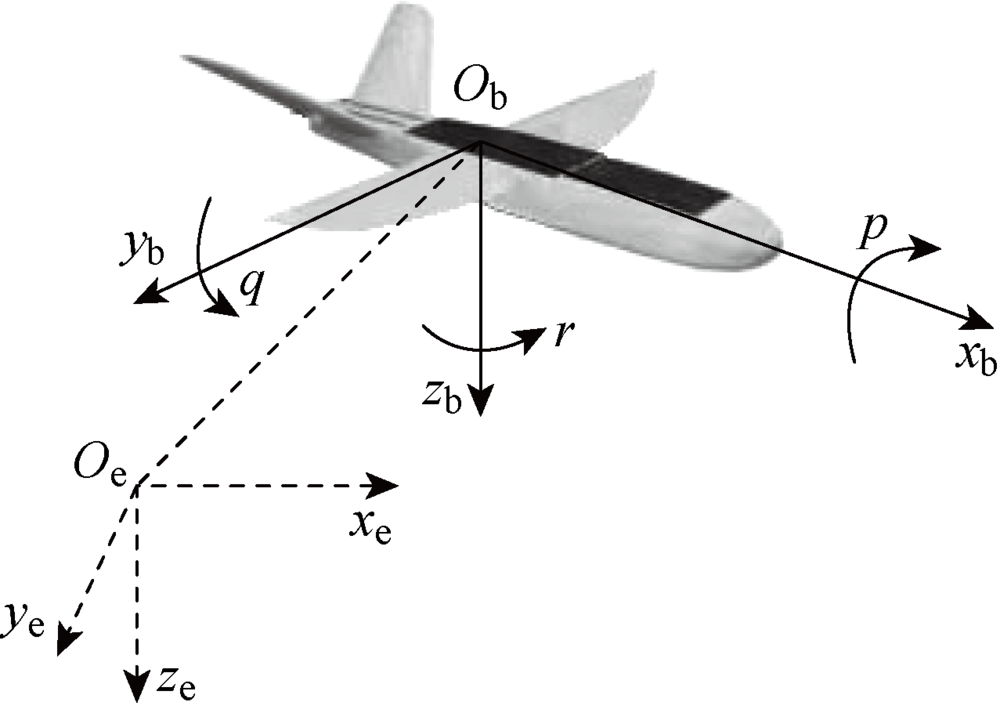
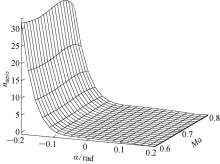
图2
气动俯仰力矩系数

图3
气动滚转力矩系数
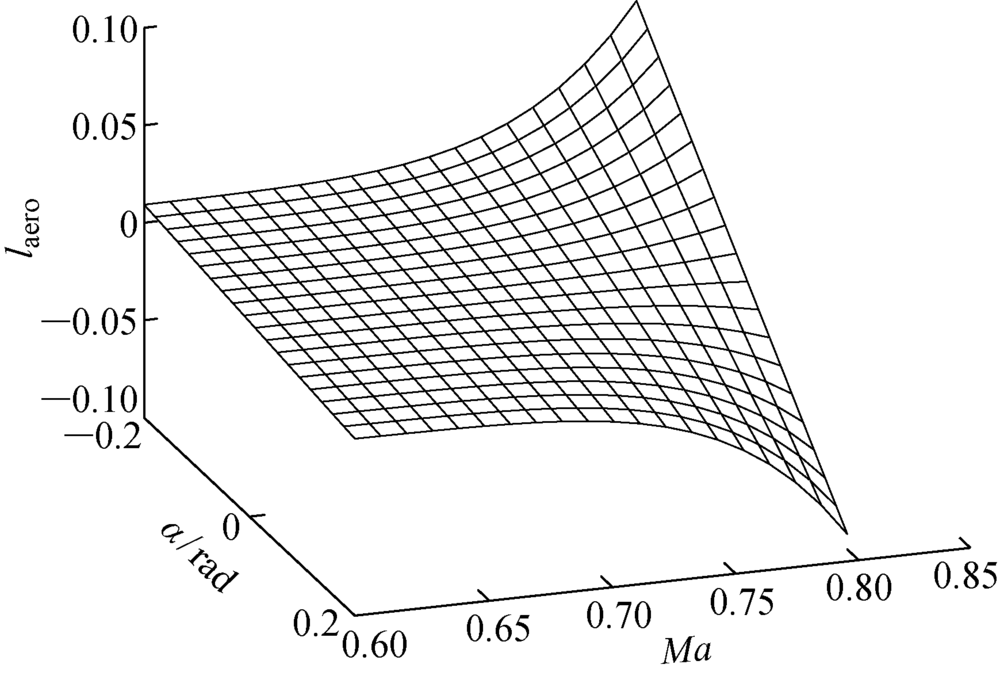

图4
操纵俯仰力矩系数
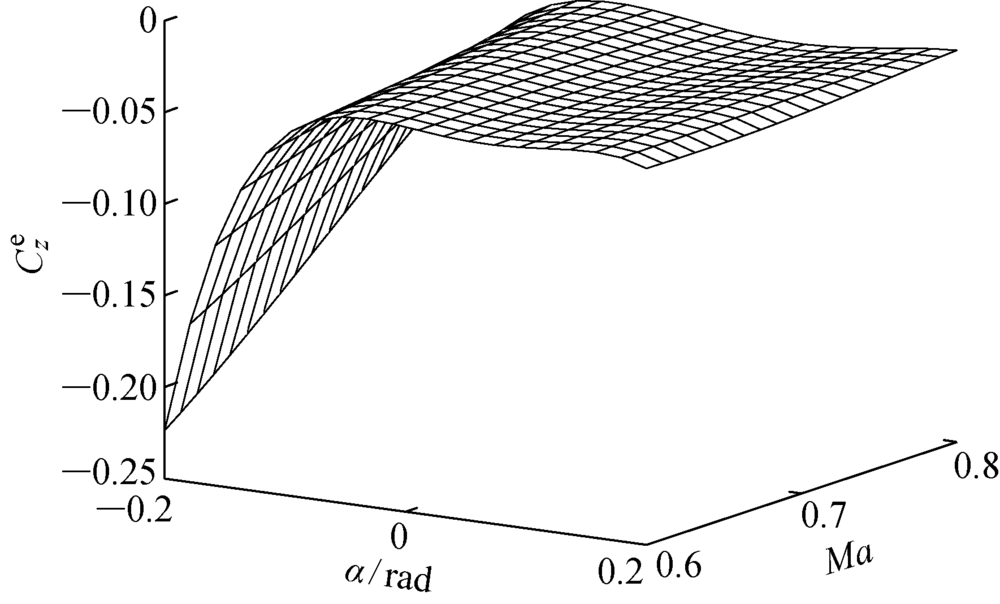

图5
操纵滚转力矩系数
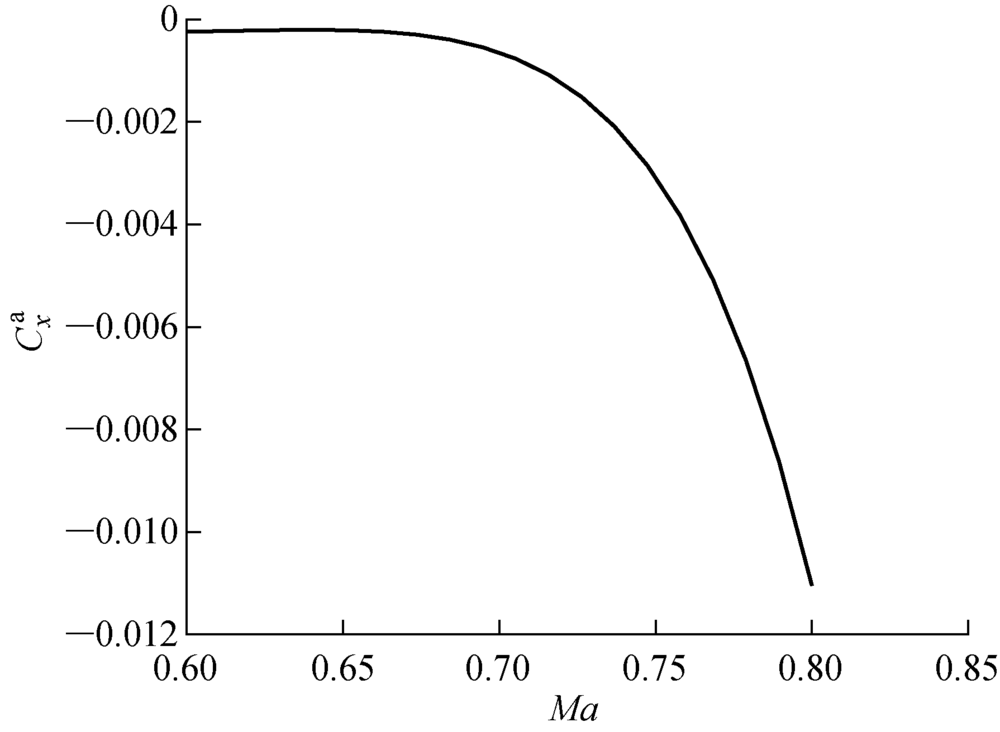
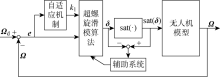
图6
无人机姿态控制框图
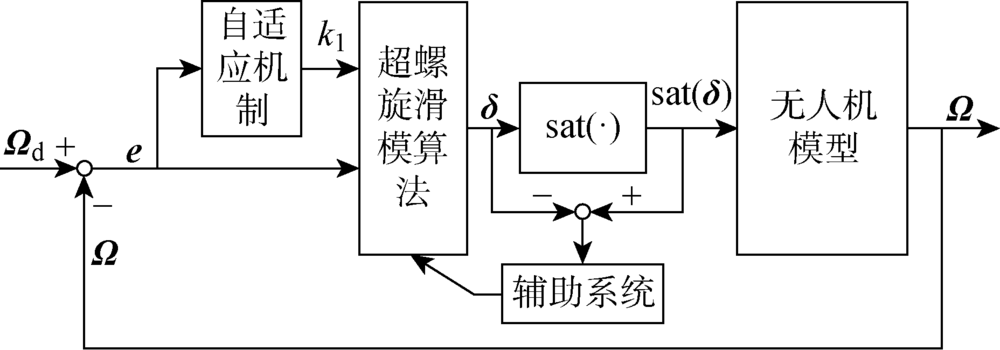
图7
控制器增益变化曲线
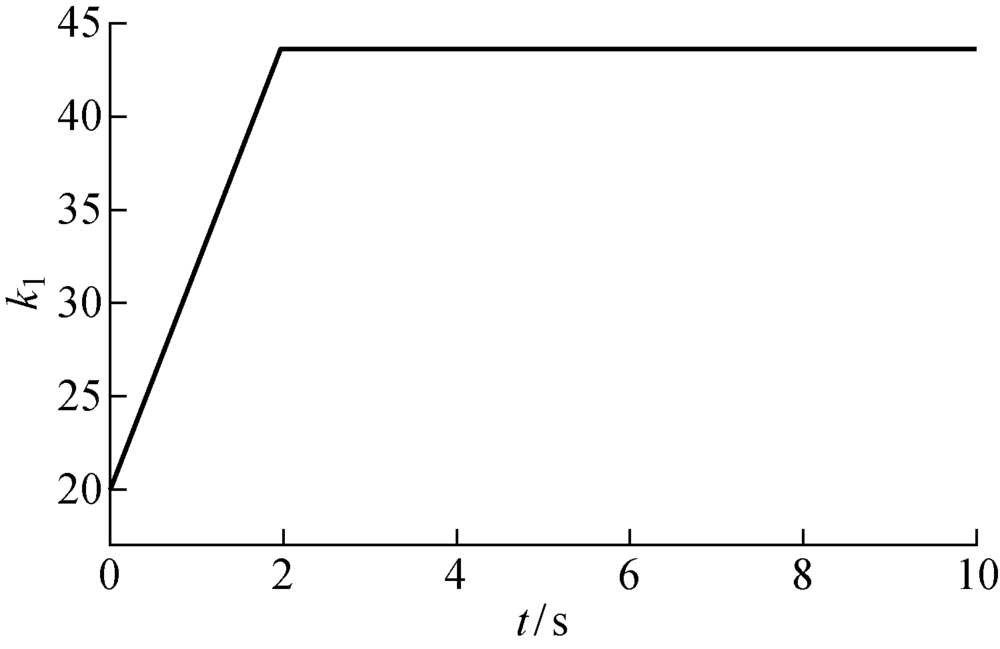

图8
ASTSM姿态角误差变化曲线
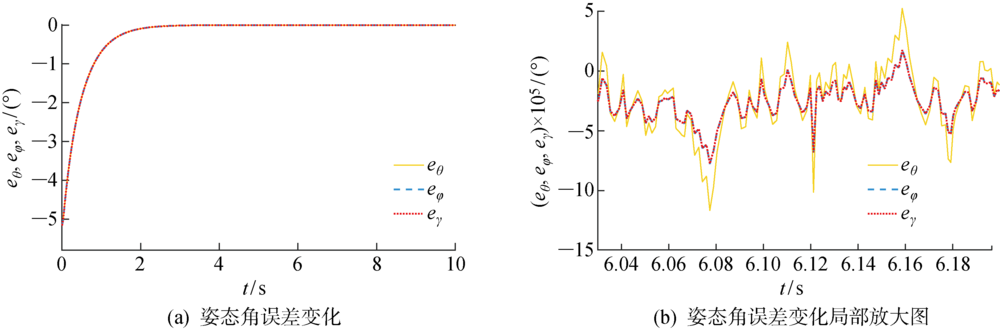
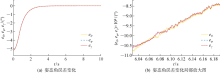
图9
SM姿态角误差变化曲线
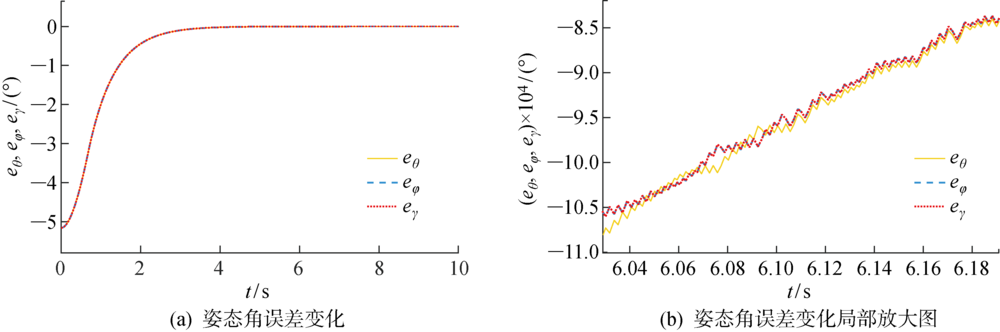
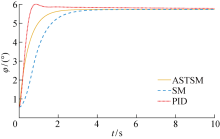
图10
偏航角跟踪曲线
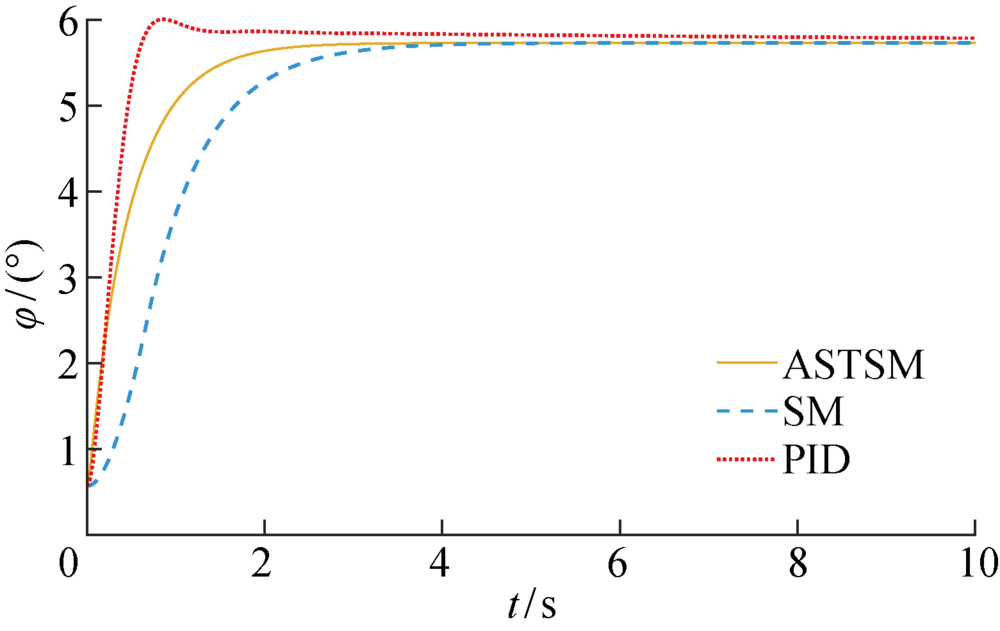
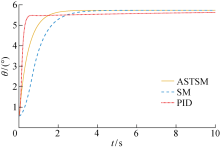
图11
俯仰角跟踪曲线
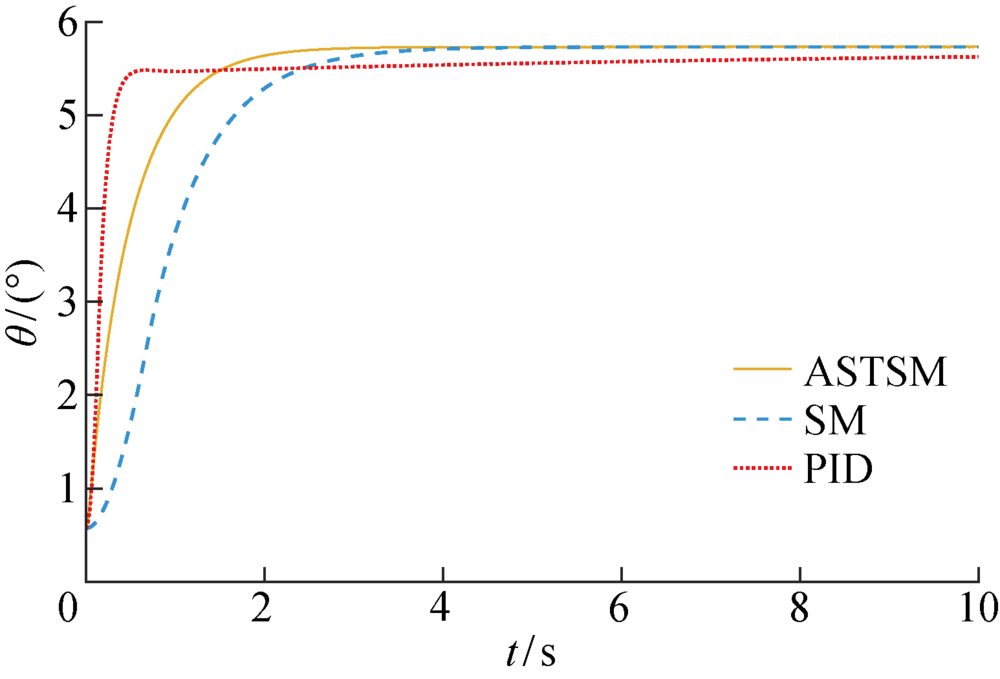
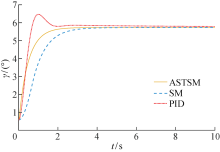
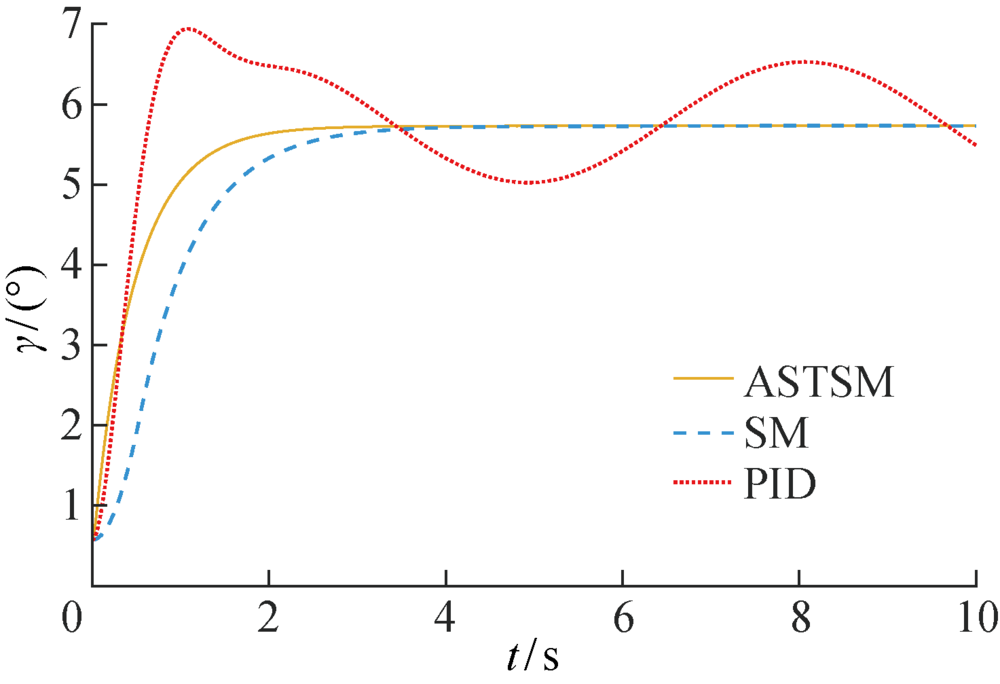
图12
滚转角曲线
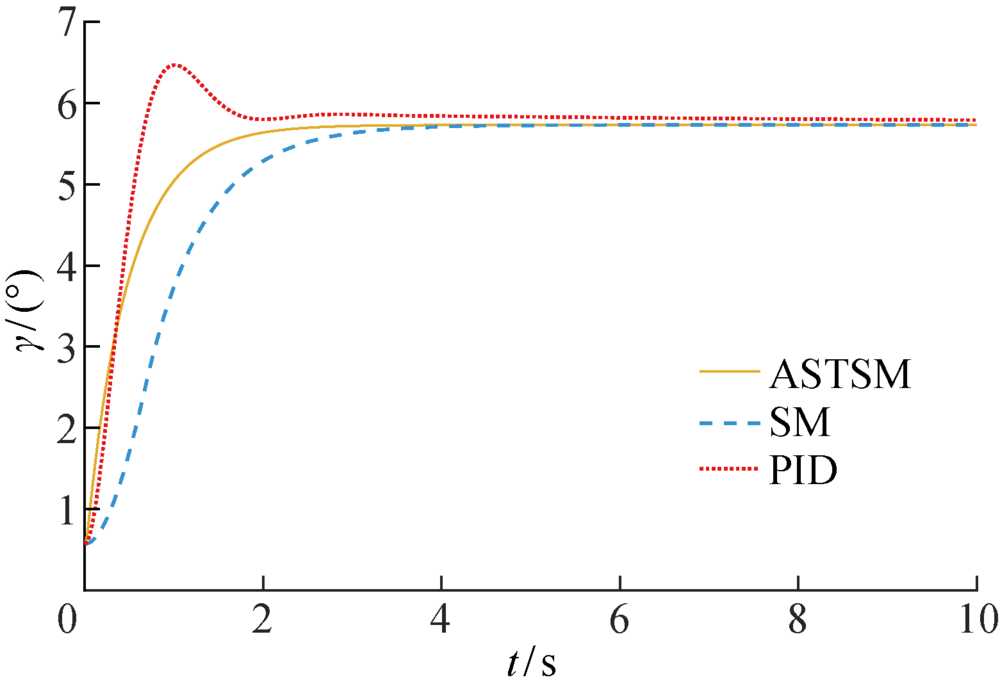

图13
偏航角跟踪曲线(扰动)
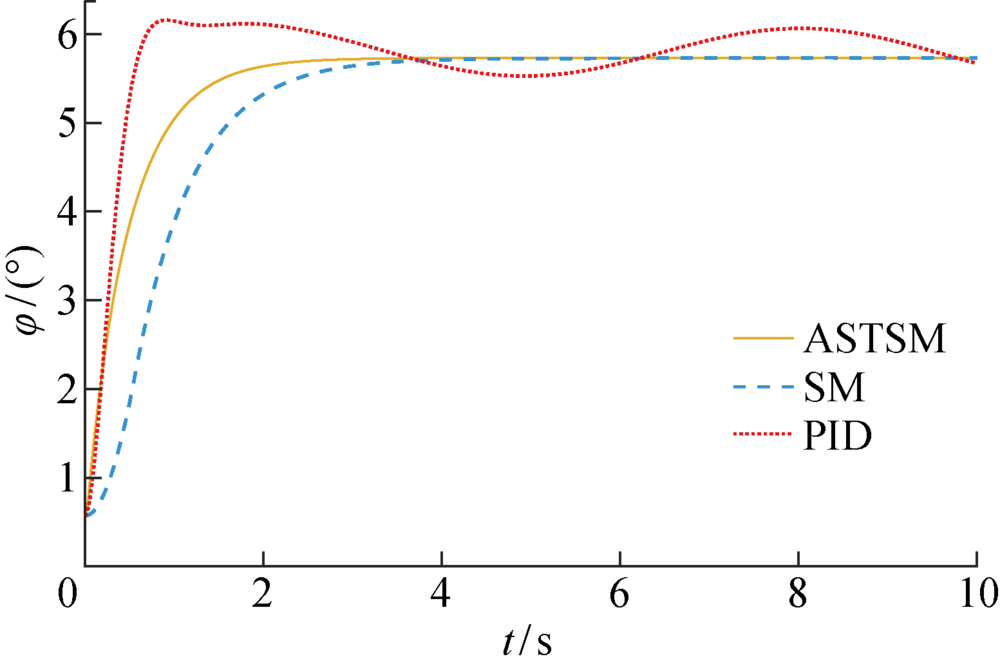
图14
俯仰角跟踪曲线(扰动)
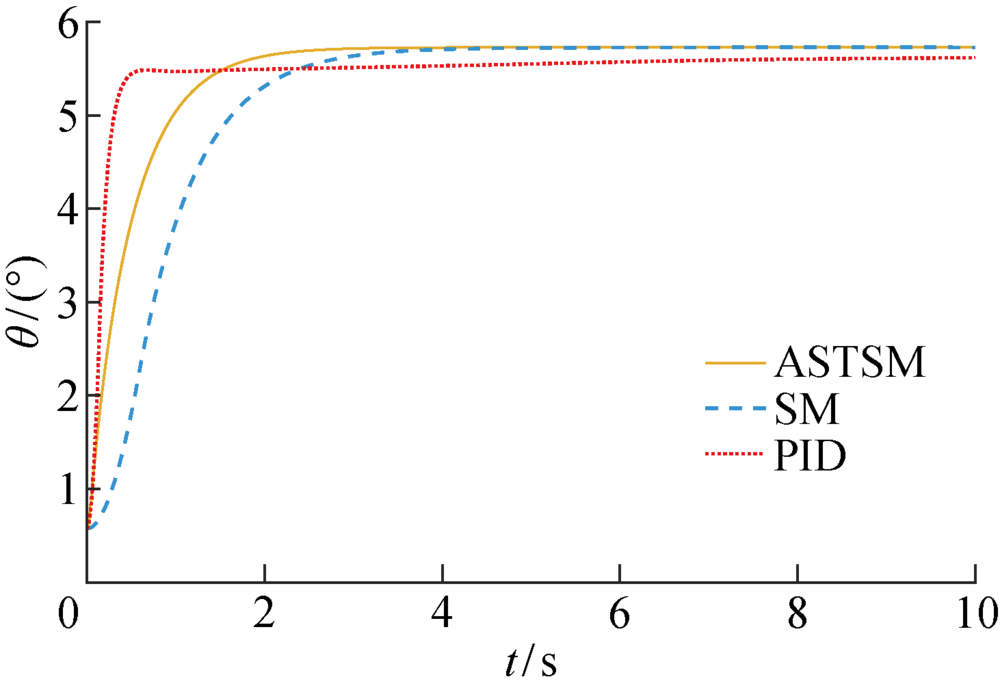
图15
滚转角曲线(扰动)
| [1] | 王家琪, 郭建国, 郭宗易, 等. 基于干扰观测器的高马赫数飞行器滑模控制[J]. 空天防御, 2021, 4(3): 85-91. |
| WANG Jiaqi, GUO Jianguo, GUO Zongyi, et al. Sliding mode control of high Mach number aircraft based on disturbance observer[J]. Air & Space Defense, 2021, 4(3): 85-91. | |
| [2] | 黄金杰, 宫煜晴, 郝现志. 平稳切换LPV系统的H∞控制器设计[J]. 控制与决策, 2022, 37(5): 1167-1173. |
| HUANG Jinjie, GONG Yuqing, HAO Xianzhi. Design of H∞ controller for smooth switching LPV systems[J]. Control and Decision, 2022, 37(5): 1167-1173. | |
| [3] | 孙冰, 陈伟. 抗控制饱和的鲁棒非线性飞行控制方法[J]. 北京航空航天大学学报, 2021, 47(12): 2475-2483. |
| SUN Bing, CHEN Wei. Robust nonlinear flight control method against control saturation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(12): 2475-2483. | |
| [4] | 刘志豪, 闵荣, 方成, 等. 多飞行模式垂直起降无人机过渡飞行控制策略[J]. 上海交通大学学报, 2019, 53(10): 1173-1181. |
| LIU Zhihao, MIN Rong, FANG Cheng, et al. Transition flight control strategy of multiple flight mode vertical take-off and landing unmanned aerial vehicle[J]. Journal of Shanghai Jiao Tong University, 2019, 53(10): 1173-1181. | |
| [5] | HUANG X, LUO W Y, LIU J R. Attitude control of fixed-wing UAV based on DDQN[C]∥2019 Chinese Automation Congress. Hangzhou, China: IEEE, 2019: 4722-4726. |
| [6] | ZHI Y F, LI G S, SONG Q, et al. Flight control law of unmanned aerial vehicles based on robust servo linear quadratic regulator and Kalman filtering[J]. International Journal of Advanced Robotic Systems, 2017, 14(1): 1-11 |
| [7] | HIRANO S, UCHIYAMA K, MASUDA K. Controller design using backstepping algorithm for fixed-wing UAV with thrust vectoring system[C]∥2019 International Conference on Unmanned Aircraft Systems. Atlanta, GA, USA: IEEE, 2019: 1084-1088. |
| [8] | DE OLIVEIRA H A, ROSA P F F. Adaptive genetic neuro-fuzzy attitude control for a fixed wing UAV[C]∥2017 IEEE International Conference on Industrial Technology. Toronto, ON, Canada: IEEE, 2017: 726-731. |
| [9] | SWARNKAR S, KOTHARI M. A simplified adaptive backstepping control of aircraft lateral/directional dynamics[J]. IFAC-PapersOnLine, 2016, 49(1): 579-584. |
| [10] | DUAN G R. Missile attitude control-A direct parametric approach[C]∥The 33rd Chinese Control Conference, Nanjing, China: TCCT, 2014: 2414-2421. |
| [11] | 张显库, 韩旭. 大型油轮艏摇混沌现象的仿真与滑模控制[J]. 上海交通大学学报, 2021, 55(1): 40-47. |
| ZHANG Xianku, HAN Xu. Modeling and sliding mode control for chaotic yawing phenomenon of large oil tanker[J]. Journal of Shanghai Jiao Tong University, 2021, 55(1): 40-47. | |
| [12] | 姚来鹏, 侯保林, 刘曦. 采用摩擦补偿的弹药传输机械臂自适应终端滑模控制[J]. 上海交通大学学报, 2020, 54(2): 144-151. |
| YAO Laipeng, HOU Baolin, LIU Xi. Adaptive terminal sliding mode control of a howitzer shell transfer arm with friction compensation[J]. Journal of Shanghai Jiao Tong University, 2020, 54(2): 144-151. | |
| [13] | 张超凡, 董琦. 考虑输入饱和的固定翼无人机自适应增益滑模控制[J]. 航空学报, 2020, 41(Sup.1): 79-87. |
| ZHANG Chaofan, DONG Qi. Adaptive-gain sliding mode control for fixed-wing UAVs with input saturation[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(Sup.1): 79-87. | |
| [14] |
DONG Q, ZONG Q, TIAN B L, et al. Adaptive-gain multivariable super-twisting sliding mode control for reentry RLV with torque perturbation[J]. International Journal of Robust and Nonlinear Control, 2017, 27(4): 620-638.
doi: 10.1002/rnc.3589 URL |
| [15] |
HU Q, LI B, QI J. Disturbance observer based finite-time attitude control for rigid spacecraft under input saturation[J]. Aerospace Science and Technology, 2014, 39: 13-21.
doi: 10.1016/j.ast.2014.08.009 URL |
| [16] | SHTESSEL Y B, MORENO J A, FRIDMAN L M. Twisting sliding mode control with adaptation: Lyapunov design, methodology and application[J]. Automatica, 2017(75): 229-235. |
| [1] | 黄宇昊, 韩超, 赵明辉, 杜乾坤, 王石刚. 考虑安全飞行通道约束的无人机飞行轨迹多目标优化策略[J]. 上海交通大学学报, 2022, 56(8): 1024-1033. |
| [2] | 李登攀, 任晓明, 颜楠楠. 基于无人机航拍的绝缘子掉串实时检测研究[J]. 上海交通大学学报, 2022, 56(8): 994-1003. |
| [3] | 罗菁, 张逸楠. 基于改进Grey-AHP的察打一体无人机作战效能评估方法[J]. 空天防御, 2022, 5(2): 1-7. |
| [4] | 聂瑞, 王红茹. 基于神经网络观测器的无人机编队执行器故障诊断[J]. 空天防御, 2022, 5(2): 32-41. |
| [5] | 李伟湋, 高培雪, 陈进, 路玉卿. 基于累积前景理论和三支决策的无人机态势评估[J]. 上海交通大学学报, 2022, 56(11): 1479-1490. |
| [6] | 郭鹏军, 张睿, 高关根, 许斌. 基于相对速度和位置辅助的无人机编队协同导航[J]. 上海交通大学学报, 2022, 56(11): 1438-1446. |
| [7] | 王克帆, 邱潇颀, 高长生, 荆武兴. 临近空间太阳能无人机横航向变质心控制技术[J]. 空天防御, 2021, 4(4): 29-36. |
| [8] | 吴诗辉, 贾军, 鲍然, 周宇, 夏青元. 面向集群对抗的多弹协同目标分配模型与仿真分析[J]. 空天防御, 2021, 4(3): 1-9. |
| [9] | 姚天成, 赵永生, 王红雨, 何炎平, 丁子龙, 池哲瀛, 蔡炜锴. 风光混合驱动长航程无人海空立体探测船研发[J]. 上海交通大学学报, 2021, 55(2): 215-220. |
| [10] | 王晓军, 管宇锋. 基于TOPSIS法和仿真法的反集群无人机装备体系贡献率研究[J]. 空天防御, 2021, 4(1): 33-40. |
| [11] | 李征, 陈建伟, 彭博. 基于伪谱法的无人机集群飞行路径规划[J]. 空天防御, 2021, 4(1): 52-59. |
| [12] | 刘晨, 谢宝娣, 董国宝, 霍达, 段雨昕, 夏川. 基于自适应积分滑模的无人机编队控制器设计[J]. 空天防御, 2021, 4(1): 65-70. |
| [13] | 王程, 倪旖, 李亮, 郭正勇, 陈兵. 针对小型商业无人机的预警技术发展现状与思考[J]. 空天防御, 2021, 4(1): 83-90. |
| [14] | 梁烽杨, 杨毅钧, 刘功龙, 万兵, 高王升. 多无人机系统协同侦察规划算法研究[J]. 空天防御, 2021, 4(1): 103-108. |
| [15] | 刘西, 李贤, 陈伟, 从光涛, 李如飞. 基于NSGA-Ⅲ算法的多目标分配方法研究[J]. 空天防御, 2021, 4(1): 109-116. |
| 阅读次数 | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
全文 673
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
摘要 1015
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||