上海交通大学学报 ›› 2022, Vol. 56 ›› Issue (11): 1461-1469.doi: 10.16183/j.cnki.jsjtu.2022.233
所属专题: 《上海交通大学学报》2022年“制导、导航与控制”专题; 制导、导航与控制
张文佳, 马辛( )
)
收稿日期:2022-06-21
出版日期:2022-11-28
发布日期:2022-12-02
通讯作者:
马辛
E-mail:maxin@buaa.edu.cn
作者简介:张文佳(1996-),男,山东省济宁市人,硕士生,从事卡尔曼滤波、信号处理、天文导航研究.
基金资助:
ZHANG Wenjia, MA Xin()
Received:2022-06-21
Online:2022-11-28
Published:2022-12-02
Contact:
MA Xin
E-mail:maxin@buaa.edu.cn
摘要:
当深空探测器接近目标行星时,由于目标行星引力快速增加,轨道动力学模型会出现较快的加速度变化.由于噪声协方差不完全已知,所以传统的滤波方法无法获得导航参数的最优估计,难以满足接近段导航系统的性能要求.为满足系统高稳定性和高精度需求,提出一种基于系统噪声协方差的滑动窗口自适应非线性滤波方法.通过构造系统噪声协方差更新函数,使用滑动窗口对噪声协方差平稳化处理,将速度噪声引起的误差与位置噪声引起的误差隔离开,实时更新所使用的滤波参数信息,自适应调节系统噪声协方差.以火星探测器为例进行仿真,仿真结果表明,相对于传统的无迹卡尔曼滤波方法,该方法获取的位置精度和速度精度分别提高90.97%和66.17%,抑制了系统模型上快速变化的积分误差,并解决传统滤波方法的发散问题.此外,分析了滤波周期和窗口大小对导航性能的影响,为深空探测自主导航提供了一种可行的自适应滤波新方法.
中图分类号:
张文佳, 马辛. 深空探测器接近段自主导航的滑动窗口自适应滤波方法[J]. 上海交通大学学报, 2022, 56(11): 1461-1469.
ZHANG Wenjia, MA Xin. A Sliding Window Adaptive Filtering Algorithm for Autonomous Navigation of the Approach Phase of Deep Space Probe[J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1461-1469.
图1
恒星和导航天体之间的角度
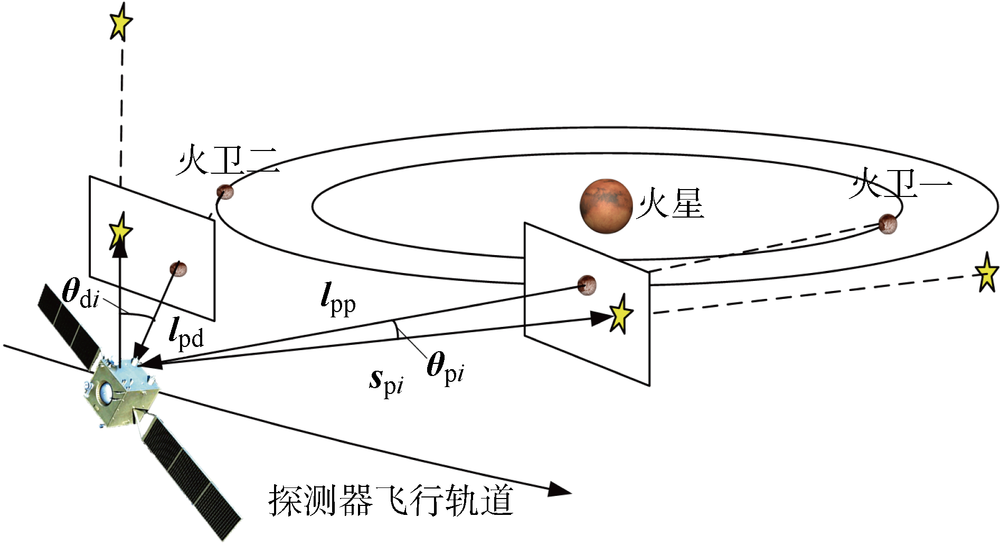
表1
火星探测器轨道参数
| 参数 | 数值 |
|---|---|
| a'/km | 1.932×108 |
| e | 0.2364 |
| i'/(°) | 23.455 |
| 升交点赤经/(°) | 0.258 |
| 近地点角距/(°) | 71.347 |
| 真近角点/(°) | 85.152 |
| 接近火星时间 | 1997-01-04T17:03:13.000 |
表2
光学传感器的参数
| 参数 | 数值 |
|---|---|
| f'/mm | 2 013.4 |
| FOV/mrad | 10×10 |
| R/(rad·像素-1) | 10 |
| CCD平面大小/像素 | 1024×1024 |
| 像素大小/m | 21 |

图2
UKF方法滤波结果
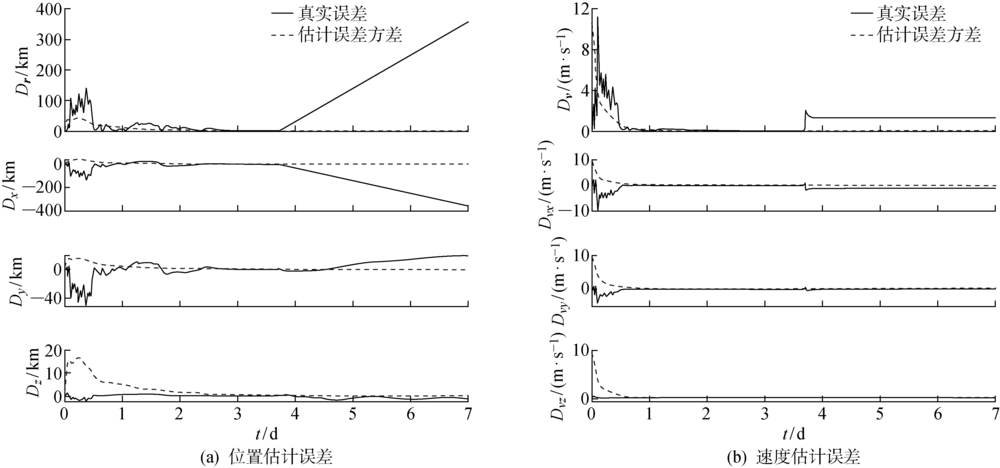

图3
AQUKF方法滤波结果
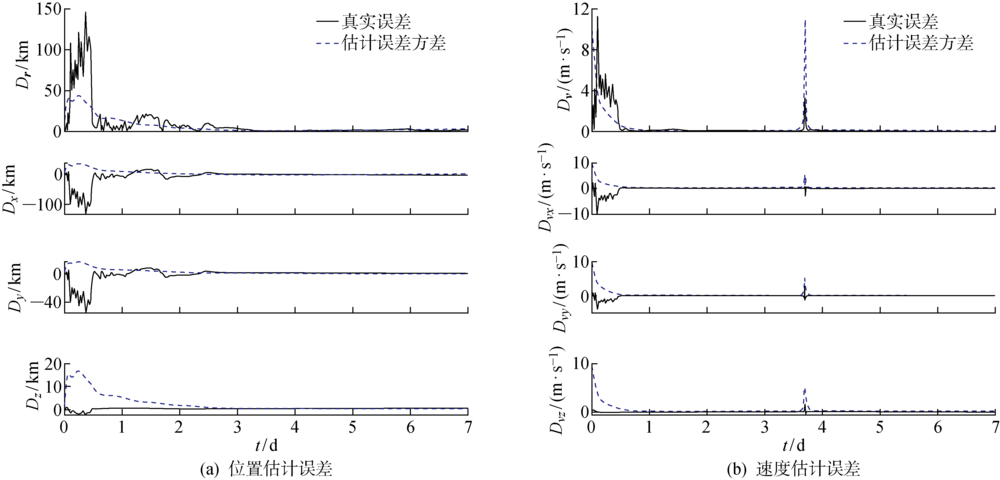
表3
UKF和AQUKF滤波方法的结果
| 滤波 方法 | 估计误差平均值 | 估计误差最大值 | |||
|---|---|---|---|---|---|
| 位置/km | 速度/ (m·s-1) | 位置/km | 速度/ (m·s-1) | ||
| UKF | 92.221 2 | 0.879 7 | 355.462 5 | 11.166 9 | |
| AQUKF | 8.323 4 | 0.297 6 | 146.019 5 | 11.173 0 | |

图4
UKF与AQUKF估计误差对比
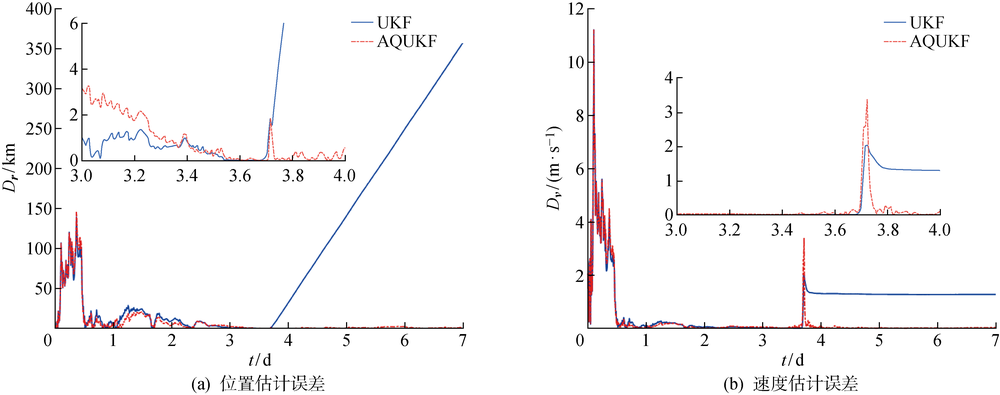
表4
滤波周期对导航方法精度的影响
| T/s | 估计误差平均值 | 估计误差最大值 | |||
|---|---|---|---|---|---|
| 位置/km | 速度/(m·s-1) | 位置/km | 速度/(m·s-1) | ||
| 120 | 3.106 5 | 0.158 1 | 51.003 | 11.904 3 | |
| 300 | 4.103 0 | 0.167 8 | 78.635 | 12.492 3 | |
| 600 | 8.323 4 | 0.297 6 | 146.019 | 11.173 0 | |
| 900 | 7.797 1 | 0.280 2 | 102.540 | 9.872 7 | |
| 1 200 | 11.574 0 | 0.538 7 | 109.420 | 56.290 3 | |

图5
滤波周期对位置误差和速度误差的影响
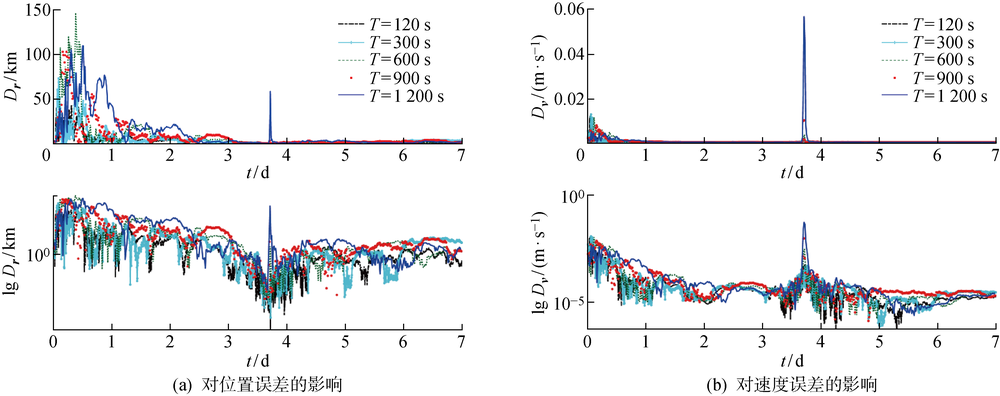

图6
窗口大小对位置误差和速度误差的影响

表5
窗口大小对导航方法精度的影响
| N | 估计误差平均值 | 估计误差最大值 | |||
|---|---|---|---|---|---|
| 位置/km | 速度/(m·s-1) | 位置/km | 速度/(m·s-1) | ||
| 1 | 8.572 8 | 0.316 1 | 150.67 | 11.197 3 | |
| 5 | 8.412 2 | 0.300 1 | 148.27 | 11.178 1 | |
| 10 | 8.323 4 | 0.297 6 | 146.02 | 11.173 0 | |
| 50 | 8.545 2 | 0.312 8 | 141.62 | 11.168 2 | |
| 100 | 8.850 2 | 0.312 7 | 140.63 | 11.167 5 | |
| 300 | 9.579 0 | 0.307 9 | 139.87 | 11.167 2 | |
| [1] | 吴伟仁, 王大轶, 宁晓琳. 深空探测器自主导航原理与技术[M]. 北京: 中国宇航出版社, 2011. |
| WU Weiren, WANG Dayi, NING Xiaolin. Principle and technology of autonomous navigation for deep-space probe[M]. Beijing: China Astronautic Publishing House, 2011. | |
| [2] | 房建成, 宁晓琳. 深空探测器自主天文导航方法[M]. 西安: 西北工业大学出版社, 2010. |
| FANG Jiancheng, NING Xiaolin. Autonomous celestial navigation method for a deep-space probe[M]. Xi’an: Northwestern Polytechnic University Press, 2010. | |
| [3] |
YU Z S, CUI P Y, CRASSIDIS J L. Design and optimization of navigation and guidance techniques for Mars pinpoint landing: Review and prospect[J]. Progress in Aerospace Sciences, 2017, 94: 82-94.
doi: 10.1016/j.paerosci.2017.08.002 URL |
| [4] |
MA X, NING X L, FANG J C. Analysis of orbital dynamic equation in navigation for a Mars gravity-assist mission[J]. The Journal of Navigation, 2012, 65(3): 531-548.
doi: 10.1017/S0373463312000100 URL |
| [5] | BHASKARAN S. Autonomous navigation for deep space missions[C]∥SpaceOps 2012 Conference. Stockholm, Sweden: AIAA, 2012: 1267135. |
| [6] |
FANG J C, YANG Y, Study on innovation adaptive EKF for in-flight alignment of airborne POS[J]. IEEE Transactions on Instrumentation and Measurement, 2011, 60(4): 1378-1388.
doi: 10.1109/TIM.2010.2084710 URL |
| [7] |
NING X L, LI Z, YANG Y Q, et al. Analysis of ephemeris errors in autonomous celestial navigation during Mars approach phase[J]. The Journal of Navigation, 2017, 70(3): 505-526.
doi: 10.1017/S0373463316000734 URL |
| [8] |
SI F, ZHAO Y, LIN Y H. Adaptively tuning sampling weights of the unscented Kalman filter in starlight refraction navigation[J]. Optik, 2017, 148: 300-311.
doi: 10.1016/j.ijleo.2017.08.097 URL |
| [9] |
XIONG K, WEI C L, LIU L D. Multiple-model adaptive estimation for space surveillance with measurement uncertainty[J]. Optimal Control Applications and Methods, 2016, 37(2): 404-423.
doi: 10.1002/oca.2176 URL |
| [10] |
LIU W W, LIU Y C, BUCKNALL R. A robust localization method for unmanned surface vehicle (USV) navigation using fuzzy adaptive Kalman filtering[J]. IEEE Access, 2019, 7: 46071-46083.
doi: 10.1109/ACCESS.2019.2909151 URL |
| [11] |
GAO X L, LUO H Y, BAO B K, et al. RL-AKF: An adaptive Kalman filter navigation algorithm based on reinforcement learning for ground vehicles[J]. Remote Sensing, 2020, 12(11): 1704.
doi: 10.3390/rs12111704 URL |
| [12] |
FRASER C T, ULRICH S. Adaptive extended Kalman filtering strategies for spacecraft formation relative navigation[J]. Acta Astronautica, 2021, 178: 700-721.
doi: 10.1016/j.actaastro.2020.10.016 URL |
| [13] | 卞鸿巍, 金志华, 王俊璞, 等. 组合导航系统新息自适应卡尔曼滤波算法[J]. 上海交通大学学报, 2006, 40(6): 1000-1003. |
| BIAN Hongwei, JIN Zhihua, WANG Junpu, et al. The innovation-based estimation adaptive Kalman filter algorithm for INS/GPS integrated navigation system[J]. Journal of Shanghai Jiao Tong University, 2006, 40(6): 1000-1003. | |
| [14] | HUANG B H, WANG J J, ZHANG J F, et al. Variational bayesian adaptive Kalman filter for integrated navigation with unknown process noise covariance[C]∥2022 2nd International Conference on Consumer Electronics and Computer Engineering. Guangzhou, China: IEEE, 2022: 436-443. |
| [15] |
ZHANG J, WANG S P, LI W S, et al. A multi-mode switching variational bayesian adaptive Kalman filter algorithm for the SINS/PNS/GMNS navigation system of pelagic ships[J]. Sensors (Basel, Switzerland), 2022, 22(9): 3372.
doi: 10.3390/s22093372 URL |
| [16] |
ZHANG X Y, DUAN H B, LUO Q N. Levenberg-Marquardt based artificial physics method for mobile robot oscillation alleviation[J]. Science China Physics Mechanics Astronomy, 2014, 57(9): 1771-1777.
doi: 10.1007/s11433-013-5244-9 URL |
| [17] |
DUXBURY T C, BORN G H, JERATH N. Viewing phobos and deimos for navigating mariner[J]. Journal of Spacecraft and Rockets, 1974, 11(4): 215-222.
doi: 10.2514/3.62046 URL |
| [18] | LEE D J, ALFRIEND K. Adaptive sigma point filtering for state and parameter estimation[C]∥AIAA/AAS Astrodynamics Specialist Conference and Exhibit. Providence, Rhode Island, USA: AIAA, 2004: 1-20. |
| [19] |
BUSSE F D, HOW J P, SIMPSON J. Demonstration of adaptive extended Kalman filter for low-Earth-orbit formation estimation using CDGPS[J]. Navigation, 2003, 50(2): 79-93.
doi: 10.1002/j.2161-4296.2003.tb00320.x URL |
| [1] | . 微小型星表探测机器人发展综述[J]. J Shanghai Jiaotong Univ Sci, 2026, 31(1): 221-240. |
| [2] | . 基于自适应鲁棒扩展卡尔曼滤波器的北斗三号PPP-B2b性能综合分析[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(6): 1208-1219. |
| [3] | 刘源渊, 张顺家, 杨艺, 耿建强. 基于球容积卡尔曼滤波器的鲁棒无源被动定位算法[J]. 空天防御, 2025, 8(5): 53-63. |
| [4] | 张雨格, 耿建强, 杨光宇, 朱苏朋, 侯振乾, 符文星. 基于IMM-SRCKF对机动目标的多弹协同被动定位算法[J]. 空天防御, 2025, 8(2): 58-65. |
| [5] | 樊朋飞, 李庆波, 李臻, 陈成林. 基于雷达相对测量的制导信息提取算法研究[J]. 空天防御, 2025, 8(2): 50-57. |
| [6] | 赵艳飞1,2,3, 肖鹏4, 王景川1,2,3, 郭锐4. 基于局部语义地图的移动机器人半自主导航[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(1): 27-33. |
| [7] | 钟一鸣1, 于曹阳1, 2, 向先波2, 3, 连琏1, 4. 基于级联滤波与误差触发支持向量回归的海洋航行器运动预测研究[J]. 海洋工程装备与技术, 2025, 12(1): 133-140. |
| [8] | 何清林, 赵宏宇, 陈雨轩, 侯翔昊. 基于CRLB的空中目标水下分布式声跟踪算法设计[J]. 空天防御, 2025, 8(1): 86-94. |
| [9] | 夏杨1, 任光辉2, 万缘1, 茅旭初1. 基于扩展卡尔曼滤波校正模型的中长基线多GNSS融合实时动态算法[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(6): 1191-1201. |
| [10] | 钱镭源, 覃方君, 李开龙, 朱天高. 基于SE(3)的鲁棒自适应算法及其在SINS/DVL中的应用[J]. 上海交通大学学报, 2024, 58(4): 498-510. |
| [11] | 杜宁, 吴树范, 陈占胜, 陈文晖, 王世耀, 徐家国, 秦栋栋. 卫星对空中动态目标凝视成像姿态规划方法[J]. 上海交通大学学报, 2024, 58(4): 411-418. |
| [12] | 唐胜景, 王太岩, 赵刚练, 郭杰, 李佳丽, 尹航. 面向目标跟踪的多传感器数据融合研究综述[J]. 空天防御, 2024, 7(4): 18-29. |
| [13] | 陈坤1, 2, 赵旭1, 董春玉1, 邸子超1, 陈宗枝1. 基于滤波器预测的抗遮挡目标跟踪算法[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(3): 400-413. |
| [14] | 乌江, 张燕, 刘泽龙, 程刚, 雷冬, 焦朝勇. 考虑驾驶工况及老化程度的锂电池荷电状态估算[J]. 上海交通大学学报, 2024, 58(12): 1935-1945. |
| [15] | 李坚1,王星超1,钟敏2,郑剑2,孙正隆1. 基于实时切片到体积配准的机器人辅助甲状腺活检自主导航[J]. J Shanghai Jiaotong Univ Sci, 2023, 28(3): 330-338. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||