上海交通大学学报 ›› 2022, Vol. 56 ›› Issue (11): 1461-1469.doi: 10.16183/j.cnki.jsjtu.2022.233
张文佳, 马辛( )
)
收稿日期:2022-06-21
出版日期:2022-11-28
发布日期:2022-12-02
通讯作者:
马辛
E-mail:maxin@buaa.edu.cn
作者简介:张文佳(1996-),男,山东省济宁市人,硕士生,从事卡尔曼滤波、信号处理、天文导航研究.
基金资助:
ZHANG Wenjia, MA Xin()
Received:2022-06-21
Online:2022-11-28
Published:2022-12-02
Contact:
MA Xin
E-mail:maxin@buaa.edu.cn
摘要:
当深空探测器接近目标行星时,由于目标行星引力快速增加,轨道动力学模型会出现较快的加速度变化.由于噪声协方差不完全已知,所以传统的滤波方法无法获得导航参数的最优估计,难以满足接近段导航系统的性能要求.为满足系统高稳定性和高精度需求,提出一种基于系统噪声协方差的滑动窗口自适应非线性滤波方法.通过构造系统噪声协方差更新函数,使用滑动窗口对噪声协方差平稳化处理,将速度噪声引起的误差与位置噪声引起的误差隔离开,实时更新所使用的滤波参数信息,自适应调节系统噪声协方差.以火星探测器为例进行仿真,仿真结果表明,相对于传统的无迹卡尔曼滤波方法,该方法获取的位置精度和速度精度分别提高90.97%和66.17%,抑制了系统模型上快速变化的积分误差,并解决传统滤波方法的发散问题.此外,分析了滤波周期和窗口大小对导航性能的影响,为深空探测自主导航提供了一种可行的自适应滤波新方法.
中图分类号:
张文佳, 马辛. 深空探测器接近段自主导航的滑动窗口自适应滤波方法[J]. 上海交通大学学报, 2022, 56(11): 1461-1469.
ZHANG Wenjia, MA Xin. A Sliding Window Adaptive Filtering Algorithm for Autonomous Navigation of the Approach Phase of Deep Space Probe[J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1461-1469.
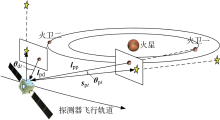
图1
恒星和导航天体之间的角度
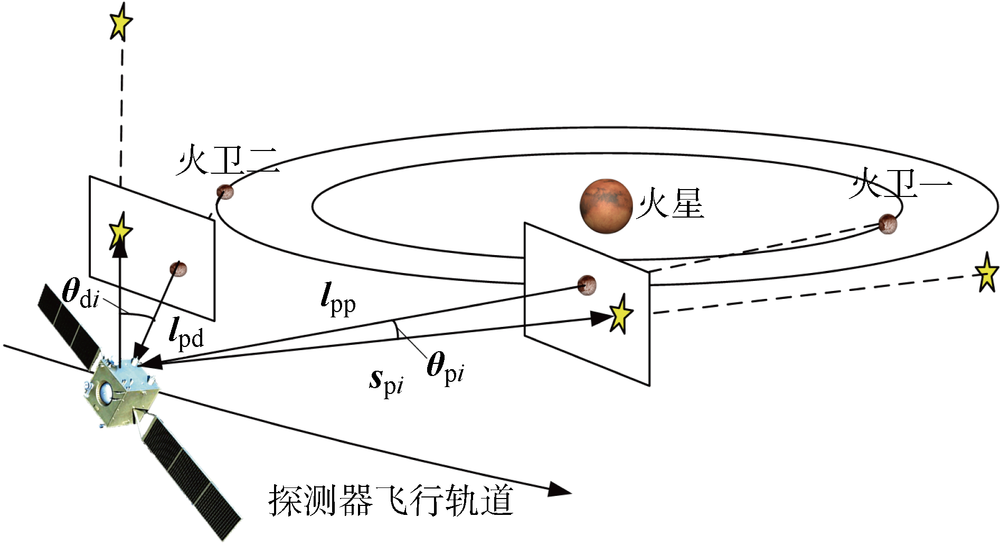
表1
火星探测器轨道参数
| 参数 | 数值 |
|---|---|
| a'/km | 1.932×108 |
| e | 0.2364 |
| i'/(°) | 23.455 |
| 升交点赤经/(°) | 0.258 |
| 近地点角距/(°) | 71.347 |
| 真近角点/(°) | 85.152 |
| 接近火星时间 | 1997-01-04T17:03:13.000 |
表2
光学传感器的参数
| 参数 | 数值 |
|---|---|
| f'/mm | 2 013.4 |
| FOV/mrad | 10×10 |
| R/(rad·像素-1) | 10 |
| CCD平面大小/像素 | 1024×1024 |
| 像素大小/m | 21 |

图2
UKF方法滤波结果
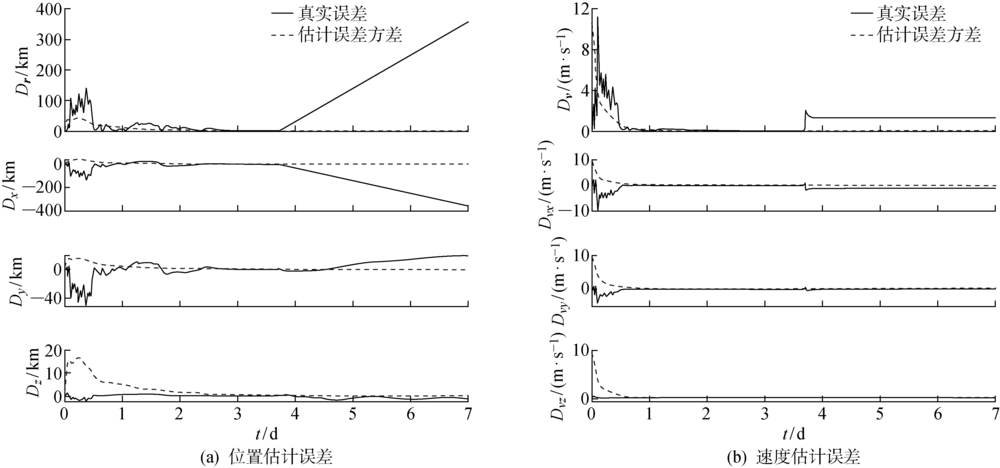

图3
AQUKF方法滤波结果
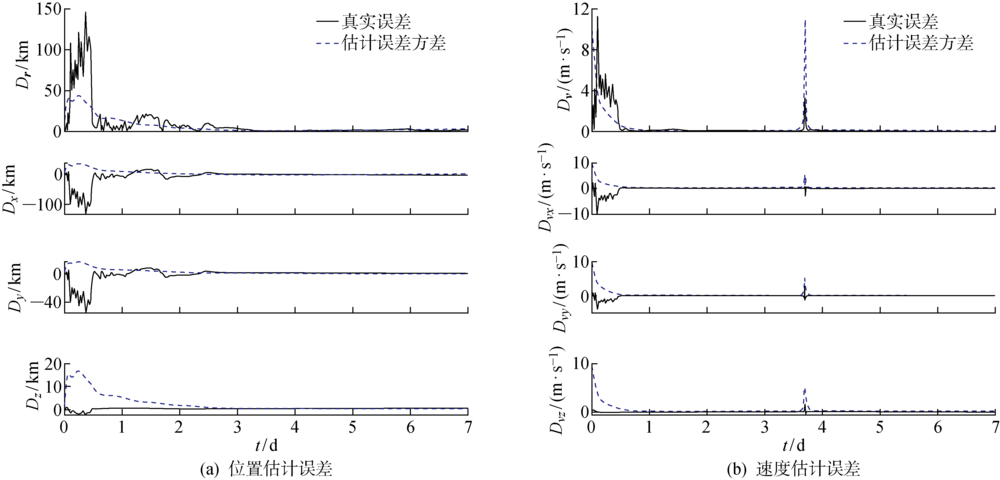
表3
UKF和AQUKF滤波方法的结果
| 滤波 方法 | 估计误差平均值 | 估计误差最大值 | |||
|---|---|---|---|---|---|
| 位置/km | 速度/ (m·s-1) | 位置/km | 速度/ (m·s-1) | ||
| UKF | 92.221 2 | 0.879 7 | 355.462 5 | 11.166 9 | |
| AQUKF | 8.323 4 | 0.297 6 | 146.019 5 | 11.173 0 | |

图4
UKF与AQUKF估计误差对比
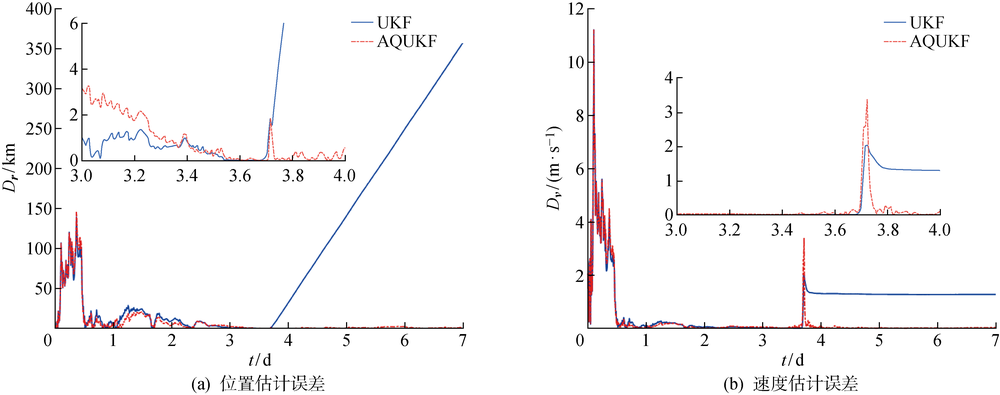
表4
滤波周期对导航方法精度的影响
| T/s | 估计误差平均值 | 估计误差最大值 | |||
|---|---|---|---|---|---|
| 位置/km | 速度/(m·s-1) | 位置/km | 速度/(m·s-1) | ||
| 120 | 3.106 5 | 0.158 1 | 51.003 | 11.904 3 | |
| 300 | 4.103 0 | 0.167 8 | 78.635 | 12.492 3 | |
| 600 | 8.323 4 | 0.297 6 | 146.019 | 11.173 0 | |
| 900 | 7.797 1 | 0.280 2 | 102.540 | 9.872 7 | |
| 1 200 | 11.574 0 | 0.538 7 | 109.420 | 56.290 3 | |

图5
滤波周期对位置误差和速度误差的影响
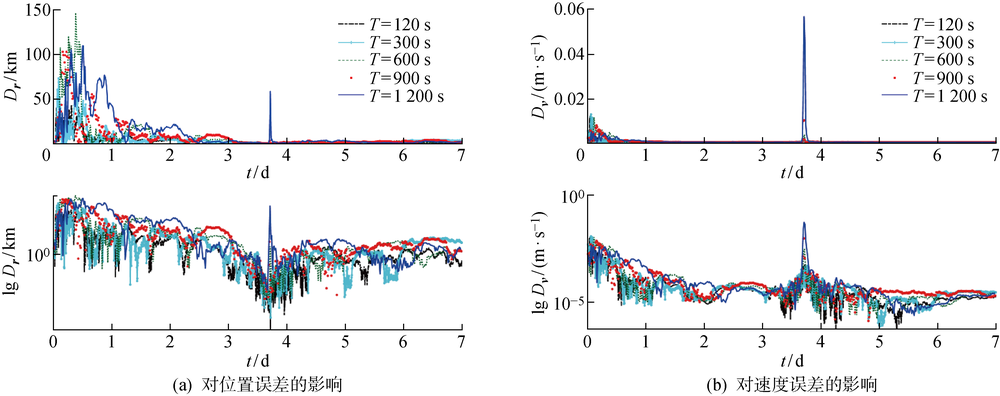

图6
窗口大小对位置误差和速度误差的影响

表5
窗口大小对导航方法精度的影响
| N | 估计误差平均值 | 估计误差最大值 | |||
|---|---|---|---|---|---|
| 位置/km | 速度/(m·s-1) | 位置/km | 速度/(m·s-1) | ||
| 1 | 8.572 8 | 0.316 1 | 150.67 | 11.197 3 | |
| 5 | 8.412 2 | 0.300 1 | 148.27 | 11.178 1 | |
| 10 | 8.323 4 | 0.297 6 | 146.02 | 11.173 0 | |
| 50 | 8.545 2 | 0.312 8 | 141.62 | 11.168 2 | |
| 100 | 8.850 2 | 0.312 7 | 140.63 | 11.167 5 | |
| 300 | 9.579 0 | 0.307 9 | 139.87 | 11.167 2 | |
| [1] | 吴伟仁, 王大轶, 宁晓琳. 深空探测器自主导航原理与技术[M]. 北京: 中国宇航出版社, 2011. |
| WU Weiren, WANG Dayi, NING Xiaolin. Principle and technology of autonomous navigation for deep-space probe[M]. Beijing: China Astronautic Publishing House, 2011. | |
| [2] | 房建成, 宁晓琳. 深空探测器自主天文导航方法[M]. 西安: 西北工业大学出版社, 2010. |
| FANG Jiancheng, NING Xiaolin. Autonomous celestial navigation method for a deep-space probe[M]. Xi’an: Northwestern Polytechnic University Press, 2010. | |
| [3] |
YU Z S, CUI P Y, CRASSIDIS J L. Design and optimization of navigation and guidance techniques for Mars pinpoint landing: Review and prospect[J]. Progress in Aerospace Sciences, 2017, 94: 82-94.
doi: 10.1016/j.paerosci.2017.08.002 URL |
| [4] |
MA X, NING X L, FANG J C. Analysis of orbital dynamic equation in navigation for a Mars gravity-assist mission[J]. The Journal of Navigation, 2012, 65(3): 531-548.
doi: 10.1017/S0373463312000100 URL |
| [5] | BHASKARAN S. Autonomous navigation for deep space missions[C]∥SpaceOps 2012 Conference. Stockholm, Sweden: AIAA, 2012: 1267135. |
| [6] |
FANG J C, YANG Y, Study on innovation adaptive EKF for in-flight alignment of airborne POS[J]. IEEE Transactions on Instrumentation and Measurement, 2011, 60(4): 1378-1388.
doi: 10.1109/TIM.2010.2084710 URL |
| [7] |
NING X L, LI Z, YANG Y Q, et al. Analysis of ephemeris errors in autonomous celestial navigation during Mars approach phase[J]. The Journal of Navigation, 2017, 70(3): 505-526.
doi: 10.1017/S0373463316000734 URL |
| [8] |
SI F, ZHAO Y, LIN Y H. Adaptively tuning sampling weights of the unscented Kalman filter in starlight refraction navigation[J]. Optik, 2017, 148: 300-311.
doi: 10.1016/j.ijleo.2017.08.097 URL |
| [9] |
XIONG K, WEI C L, LIU L D. Multiple-model adaptive estimation for space surveillance with measurement uncertainty[J]. Optimal Control Applications and Methods, 2016, 37(2): 404-423.
doi: 10.1002/oca.2176 URL |
| [10] |
LIU W W, LIU Y C, BUCKNALL R. A robust localization method for unmanned surface vehicle (USV) navigation using fuzzy adaptive Kalman filtering[J]. IEEE Access, 2019, 7: 46071-46083.
doi: 10.1109/ACCESS.2019.2909151 URL |
| [11] |
GAO X L, LUO H Y, BAO B K, et al. RL-AKF: An adaptive Kalman filter navigation algorithm based on reinforcement learning for ground vehicles[J]. Remote Sensing, 2020, 12(11): 1704.
doi: 10.3390/rs12111704 URL |
| [12] |
FRASER C T, ULRICH S. Adaptive extended Kalman filtering strategies for spacecraft formation relative navigation[J]. Acta Astronautica, 2021, 178: 700-721.
doi: 10.1016/j.actaastro.2020.10.016 URL |
| [13] | 卞鸿巍, 金志华, 王俊璞, 等. 组合导航系统新息自适应卡尔曼滤波算法[J]. 上海交通大学学报, 2006, 40(6): 1000-1003. |
| BIAN Hongwei, JIN Zhihua, WANG Junpu, et al. The innovation-based estimation adaptive Kalman filter algorithm for INS/GPS integrated navigation system[J]. Journal of Shanghai Jiao Tong University, 2006, 40(6): 1000-1003. | |
| [14] | HUANG B H, WANG J J, ZHANG J F, et al. Variational bayesian adaptive Kalman filter for integrated navigation with unknown process noise covariance[C]∥2022 2nd International Conference on Consumer Electronics and Computer Engineering. Guangzhou, China: IEEE, 2022: 436-443. |
| [15] |
ZHANG J, WANG S P, LI W S, et al. A multi-mode switching variational bayesian adaptive Kalman filter algorithm for the SINS/PNS/GMNS navigation system of pelagic ships[J]. Sensors (Basel, Switzerland), 2022, 22(9): 3372.
doi: 10.3390/s22093372 URL |
| [16] |
ZHANG X Y, DUAN H B, LUO Q N. Levenberg-Marquardt based artificial physics method for mobile robot oscillation alleviation[J]. Science China Physics Mechanics Astronomy, 2014, 57(9): 1771-1777.
doi: 10.1007/s11433-013-5244-9 URL |
| [17] |
DUXBURY T C, BORN G H, JERATH N. Viewing phobos and deimos for navigating mariner[J]. Journal of Spacecraft and Rockets, 1974, 11(4): 215-222.
doi: 10.2514/3.62046 URL |
| [18] | LEE D J, ALFRIEND K. Adaptive sigma point filtering for state and parameter estimation[C]∥AIAA/AAS Astrodynamics Specialist Conference and Exhibit. Providence, Rhode Island, USA: AIAA, 2004: 1-20. |
| [19] |
BUSSE F D, HOW J P, SIMPSON J. Demonstration of adaptive extended Kalman filter for low-Earth-orbit formation estimation using CDGPS[J]. Navigation, 2003, 50(2): 79-93.
doi: 10.1002/j.2161-4296.2003.tb00320.x URL |
| [1] | 姜俊豪, 陈刚. 驾驶机器人转向操纵的动态模型预测控制方法[J]. 上海交通大学学报, 2022, 56(5): 594-603. |
| [2] | 赵勇, 苏丹. 基于4种长短时记忆神经网络组合模型的畸形波预报[J]. 上海交通大学学报, 2022, 56(4): 516-522. |
| [3] | 高红莲, 尤杰, 曹松银. 基于PF-UKF组合滤波的SINS/GPS组合导航系统空中对准方法[J]. 上海交通大学学报, 2022, 56(11): 1447-1452. |
| [4] | 董祥祥, 吕润妍, 蔡云泽. 基于变分贝叶斯理论的不确定厚尾噪声滤波方法[J]. 上海交通大学学报, 2020, 54(9): 881-889. |
| [5] | 崔乃刚, 蔡李根, 荣思远. 基于有向图切换IMM-CKF高速滑翔目标跟踪算法[J]. 空天防御, 2020, 3(3): 1-8. |
| [6] | 张记华, 韦亚利, 李智, 周小川. 弹载单基测角被动定位滤波算法研究[J]. 空天防御, 2020, 3(1): 34-40. |
| [7] | 胡兵,杨明,郭林栋,王春香,王冰. 基于地面快速鲁棒特征的智能车全局定位方法[J]. 上海交通大学学报(自然版), 2019, 53(2): 203-208. |
| [8] | 殷玮, 祁文治. 基于IMM_UKF的自抗扰控制导引律研究[J]. 空天防御, 2018, 1(1): 56-62. |
| [9] | 陈小玲,茅旭初. 基于粒子群算法和平方根平淡卡尔曼滤波的北斗导航系统定位估计算法[J]. 上海交通大学学报(自然版), 2017, 51(5): 592-. |
| [10] | 黄宜坤,陈梅珊,张会生,翁史烈. 基于Sigma点卡尔曼滤波的燃气轮机气路故障诊断[J]. 上海交通大学学报(自然版), 2016, 50(04): 534-539. |
| [11] | 薛海建1,王解1,2,郭晓松1,周召发1. SINS非线性自对准中的强跟踪UKF算法设计[J]. 上海交通大学学报(自然版), 2015, 49(09): 1429-1434. |
| [12] | 李建,何黎明,蔡云泽. 带有等式状态约束的多传感器数据融合算法[J]. 上海交通大学学报(自然版), 2014, 48(07): 893-898. |
| [13] | 赵文骏,茅旭初. 一种用于高动态全球定位系统信号跟踪的新模型[J]. 上海交通大学学报(自然版), 2014, 48(03): 323-327. |
| [14] | 朱立新,马春来,孟. IMM-SRUKF在GPS/INS组合导航中的应用[J]. 上海交通大学学报(自然版), 2014, 48(03): 346-350. |
| [15] | 李伟,刘美红,段登平. 基于简化差分插值滤波的编队卫星相对导航[J]. 上海交通大学学报(自然版), 2014, 48(02): 229-233. |
| 阅读次数 | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
全文 594
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
摘要 863
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||