上海交通大学学报 ›› 2020, Vol. 54 ›› Issue (9): 973-980.doi: 10.16183/j.cnki.jsjtu.2020.146
赵建霞1, 段海滨1( ), 赵彦杰2, 范彦铭3, 魏晨1
), 赵彦杰2, 范彦铭3, 魏晨1
收稿日期:2020-05-25
出版日期:2020-09-28
发布日期:2020-10-10
通讯作者:
段海滨
E-mail:hbduan@buaa.edu.cn
作者简介:赵建霞(1995-),女,云南省大理市人,硕士生,主要从事无人机自主控制的研究
基金资助:
ZHAO Jianxia1, DUAN Haibin1(), ZHAO Yanjie2, FAN Yanming3, WEI Chen1
Received:2020-05-25
Online:2020-09-28
Published:2020-10-10
Contact:
DUAN Haibin
E-mail:hbduan@buaa.edu.cn
摘要:
有人/无人机共融集群中的有人机可弥补无人机在复杂环境中能力的不足.利用鸽群层级交互机制能够高效传递信息的特点,提出一种有人/无人机集群一致性控制方法.根据动力学约束与人类行为特点,建立无人机动力学模型和多通道的有人机操作员模型.在此基础上,通过鸽群层级交互机制构建集群系统的层级交互网络:有人机对等级较高的无人机发送指令,并通过层级网络影响整个无人机群体.设计可节约资源的自适应牵制控制策略,实现有人/无人机集群运动状态的一致性.此外,对系统稳定性进行简要分析.仿真结果验证了方法的有效性.
中图分类号:
赵建霞, 段海滨, 赵彦杰, 范彦铭, 魏晨. 基于鸽群层级交互的有人/无人机集群一致性控制[J]. 上海交通大学学报, 2020, 54(9): 973-980.
ZHAO Jianxia, DUAN Haibin, ZHAO Yanjie, FAN Yanming, WEI Chen. Consensus Control of Manned-Unmanned Aerial Vehicle Swarm Based on Hierarchy Interaction of Pigeons[J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 973-980.

图1
多通道有人机操作员模型示意图

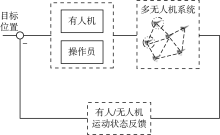
图2
有人/无人机共融集群系统控制结构图
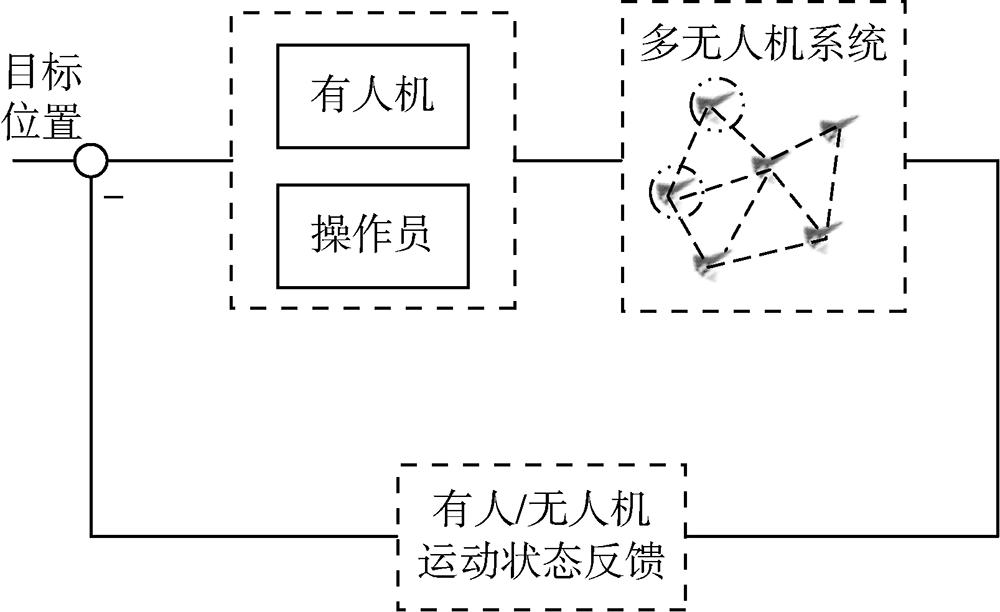
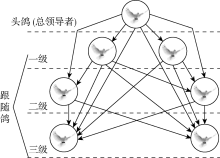
图3
鸽群层级示意图
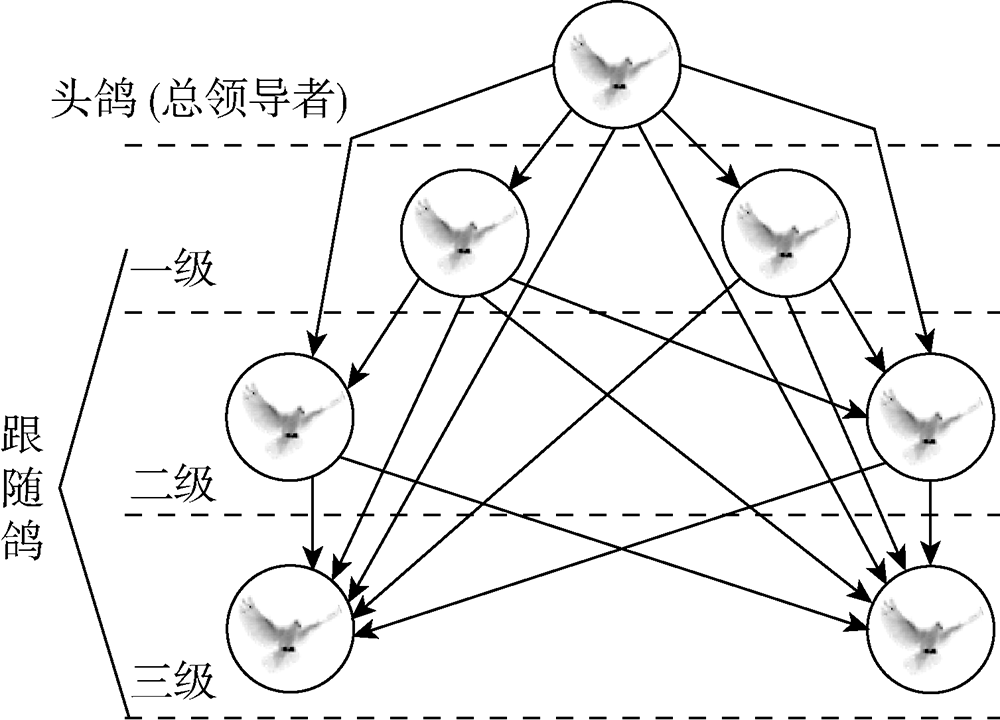
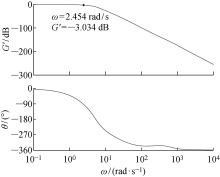
图4
闭环频率响应
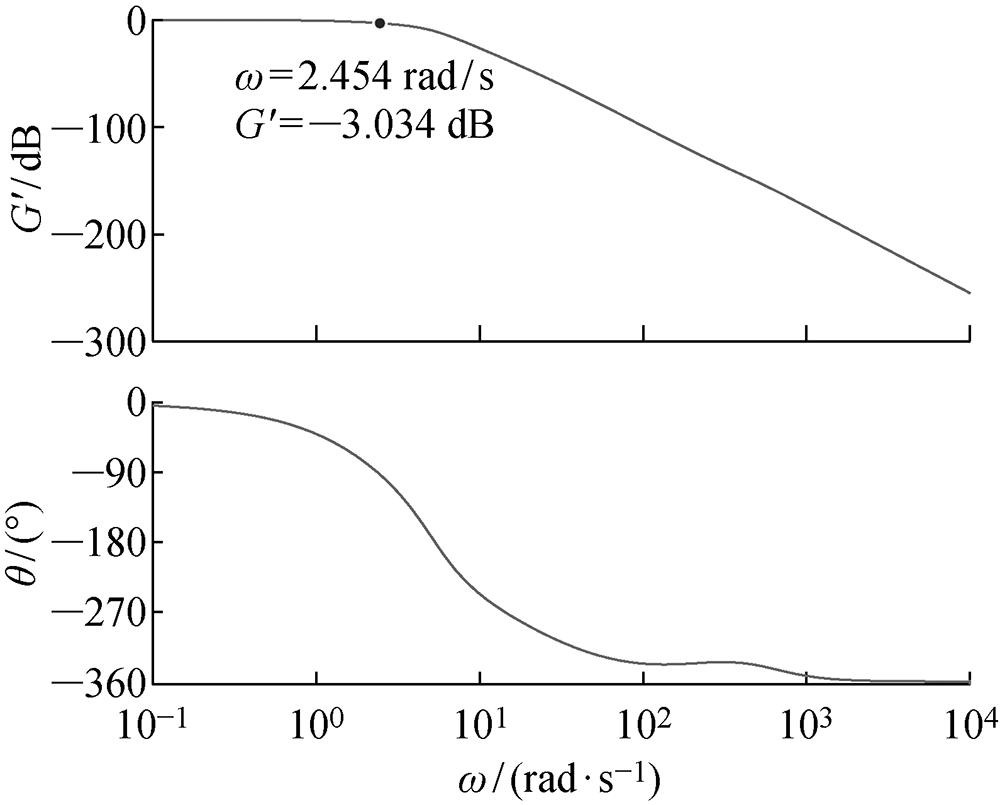
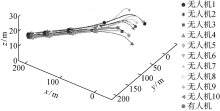
图5
三维运动轨迹
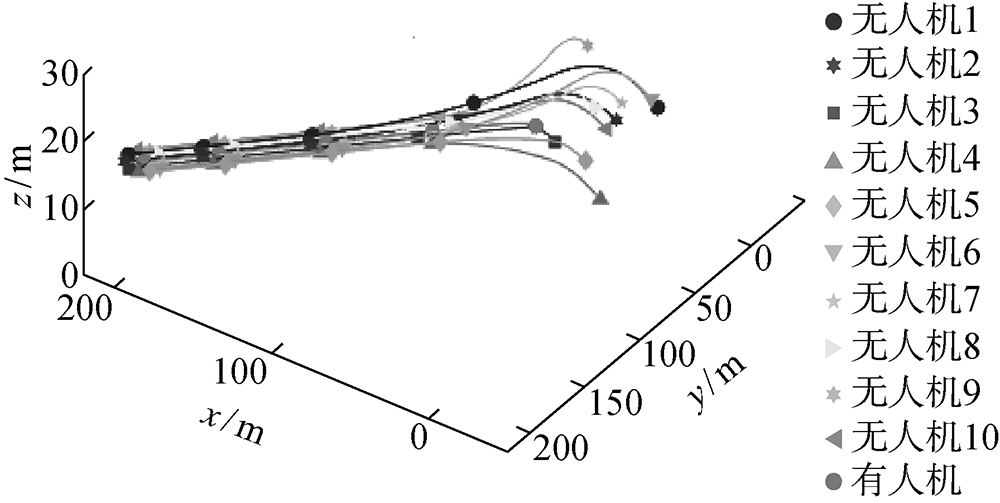

图6
有人机与无人机的均方根误差

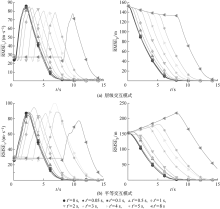
图7
不同模式下的交互时延影响
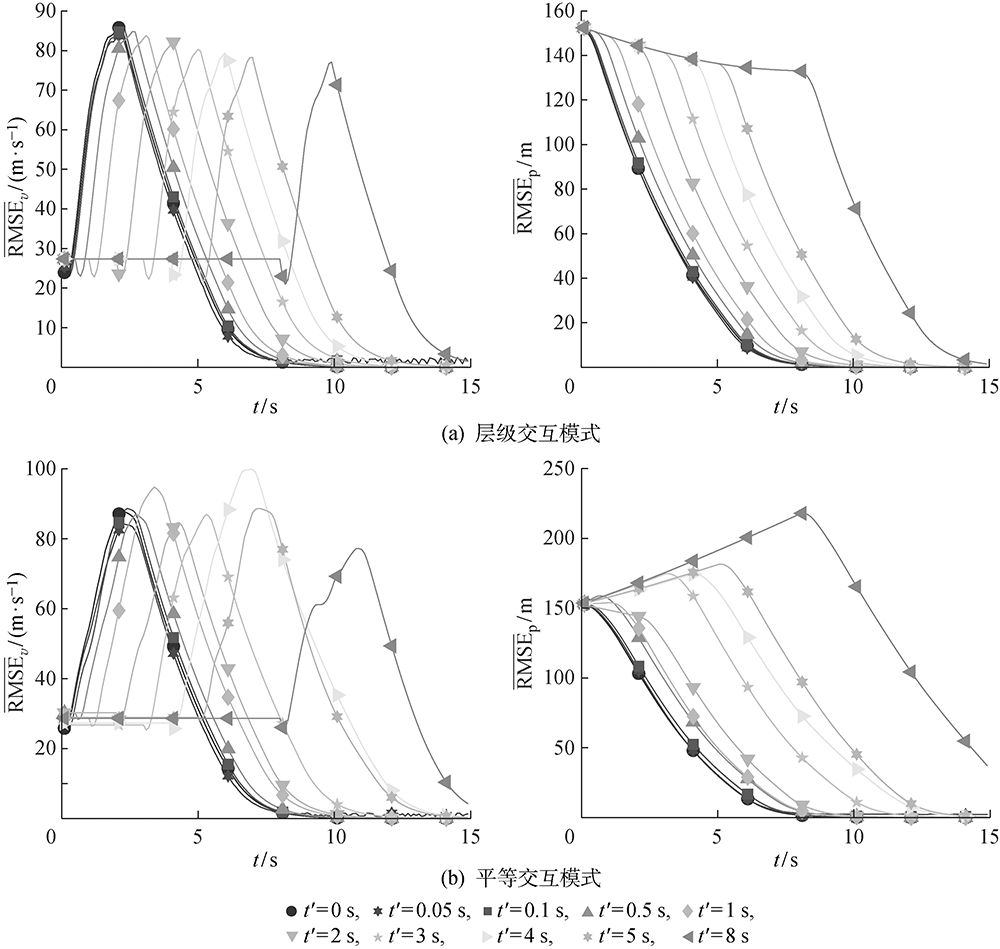

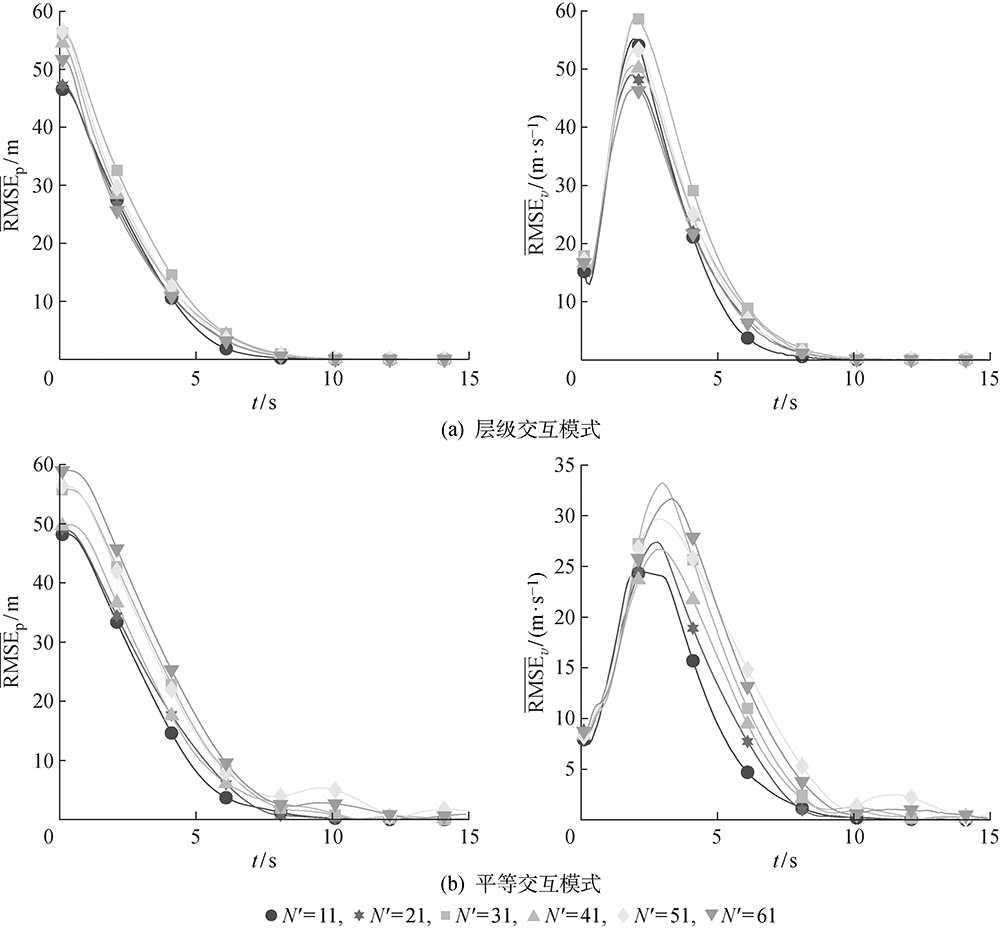
图8
不同模式下的集群数量影响
| [1] | 牛轶峰, 沈林成, 李杰, 等. 无人-有人机协同控制关键问题[J]. 中国科学: 信息科学, 2019,49(5):538-554. |
| NIU Yifeng, SHEN Lincheng, LI Jie, et al. Key scientific problems in cooperation control of unmanned-manned aircraft systems[J]. Scientia Sinica (Informationis), 2019,49(5):538-554. | |
| [2] | 段海滨, 邱华鑫. 基于群体智能的无人机集群自主控制[M]. 北京: 科学出版社, 2018. |
| DUAN Haibin, QIU Huaxin. Unmanned aerial vehicle swarm autonomous control based on swarm intelligence[M]. Beijing: Science Press, 2018. | |
| [3] | CHEN J, XU J, DING L, et al. Limited intervention collaborative decision-making of MAV/UAV team based on FCM [C]//2016 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC). Piscataway, NJ, USA: IEEE, 2016: 1-6. |
| [4] | ZHONG Y, YAO P Y, ZHANG J Y, et al. Formation and adjustment of manned/unmanned combat aerial vehicle cooperative engagement system[J]. Journal of Systems Engineering and Electronics, 2018,29(4):756-767. |
| [5] | NAGY M, AKOS Z, BIRO D, et al. Hierarchical group dynamics in pigeon flocks[J]. Nature, 2010,464(7290):890-893. |
| [6] | NAGY M, VASARHELYI G, PETTIT B, et al. Context-dependent hierarchies in pigeons[J]. PNAS, 2013,110(32):13049-13054. |
| [7] | ZAFEIRIS A, VICSEK T. Advantages of hierarchical organization: From pigeon flocks to optimal network structures[M] //Research in the Decision Sciences for Global Business: Best Papers from the 2013 Annual Conference. London: Pearson FT Press, 2015: 21-34. |
| [8] | FLACK A, BIRO D, GUILFORD T, et al. Modelling group navigation: Transitive social structures improve navigational performance[J]. Journal of the Royal Society, Interface, 2015,12(108):20150213. |
| [9] | LUO Q N, DUAN H B. Distributed UAV flocking control based on homing pigeon hierarchical strategies[J]. Aerospace Science and Technology, 2017,70:257-264. |
| [10] | QU Z H. An impact equivalence principle of separating control designs for networked heterogeneous affine systems[J]. IFAC Proceedings Volumes, 2012,45(26):210-215. |
| [11] | NIEUWENHUIZEN F M, ZAAL P M T, MULDER M, et al. Modeling human multichannel perception and control using linear time-invariant models[J]. Journal of Guidance, Control, and Dynamics, 2008,31(4):999-1013. |
| [12] | ABBINK D A, MULDER M, VAN DER HELM F C T, et al. Measuring neuromuscular control dynamics during car following with continuous haptic feedback[J]. IEEE Transactions on Systems, Man, and Cybernetics. Part B, Cybernetics: A Publication of the IEEE Systems, Man, and Cybernetics Society, 2011,41(5):1239-1249. |
| [13] | OLIVARI M, NIEUWENHUIZEN F M, VENROOIJ J, et al. Methods for multiloop identification of visual and neuromuscular pilot responses[J]. IEEE Transactions on Cybernetics, 2015,45(12):2780-2791. |
| [14] | PETTIT B, PERNA A, BIRO D, et al. Interaction rules underlying group decisions in homing pigeons[J]. Journal of the Royal Society, Interface, 2013,10(89):20130529. |
| [15] | QIU H X, DUAN H B. Multiple UAV distributed close formation control based on in-flight leadership hierarchies of pigeon flocks[J]. Aerospace Science and Technology, 2017,70:471-486. |
| [16] | 邱华鑫, 段海滨, 范彦铭. 基于鸽群行为机制的多无人机自主编队[J]. 控制理论与应用, 2015,32(10):1298-1304. |
| QIU Huaxin, DUAN Haibin, FAN Yanming. Multiple unmanned aerial vehicle autonomous formation based on the behavior mechanism in pigeon flocks[J]. Control Theory & Applications, 2015,32(10):1298-1304. | |
| [17] | ZHOU B L, YANG Y Q, XU X Y. The group-delay consensus for second-order multi-agent systems by piecewise adaptive pinning control in part of time interval[J]. Physica A: Statistical Mechanics and its Applications, 2019,513:694-708. |
| [18] | ATMAN M W S, HATANAKA T, QU Z H, et al. Motion synchronization for semi-autonomous robotic swarm with a passivity-short human operator[J]. International Journal of Intelligent Robotics and Applications, 2018,2(2):235-251. |
| [19] | 邱华鑫, 段海滨, 范彦铭, 等. 鸽群交互模式切换模型及其同步性分析[J/OL]. (2020-12-05)[2020-06-16]. https://kns.cnki.net/KCMS/detail/23.1538.TP.20191205.1011.004.html. |
| QIU Huaxin, DUAN Haibin, FAN Yanming, et al. Pigeon flock interaction pattern switching model and its synchronization analysis [J/OL]. (2020-12-05)[2020-06-16]. https://kns.cnki.net/KCMS/detail/23.1538.TP.20191205.1011.004.html. |
| [1] | 徐晨辉, 俞芳慧, 何德峰. 基于扰动块的柔性臂分布式滚动时域估计[J]. 上海交通大学学报, 2022, 56(7): 868-876. |
| [2] | 毛营忠, 冯智勇, 郭会茹. 考虑多性能约束的车辆主动前轮转向静态输出反馈控制[J]. 上海交通大学学报, 2022, 56(2): 156-164. |
| [3] | 丁明, 孟帅, 王书恒, 夏玺. 六自由度波浪补偿平台的神经网络自适应反馈线性化控制[J]. 上海交通大学学报, 2022, 56(2): 165-172. |
| [4] | 于特, 王磊. 基于协同控制的自重构平台算法及试验验证[J]. 上海交通大学学报, 2021, 55(11): 1493-1498. |
| [5] | 梅蓉. 森林环境下的无人直升机安全飞行控制[J]. 上海交通大学学报, 2020, 54(9): 994-999. |
| [6] | 李朋博, 苑明哲, 肖金超, 熊俊峰. 基于航向约束的无人艇位姿保持制导策略[J]. 上海交通大学学报, 2020, 54(9): 987-993. |
| [7] | 陈龙胜, 王琦, 何国毅. 非仿射纯反馈非线性切换系统自适应控制[J]. 上海交通大学学报, 2020, 54(9): 981-986. |
| [8] | 王志文, 刘伟. 拒绝服务攻击下信息物理系统事件触发广义预测控制[J]. 上海交通大学学报, 2020, 54(9): 910-915. |
| [9] | 何德峰, 彭彬彬, 顾煜佳, 余世明. 基于高斯过程回归的车辆巡航系统学习预测控制[J]. 上海交通大学学报, 2020, 54(9): 904-909. |
| [10] | 刘邱, 赵东亚. 单输入单输出系统离散积分滑模预测控制[J]. 上海交通大学学报, 2020, 54(9): 898-903. |
| [11] | 贺宏伟, 邹早建, 曾智华. 欠驱动水面船舶的自适应神经网络-滑模路径跟随控制[J]. 上海交通大学学报, 2020, 54(9): 890-897. |
| [12] | 吴志伟, 吴永建, 柴天佑. 基于同步扰动随机逼近算法的电熔镁炉智能控制系统[J]. 上海交通大学学报(自然版), 2011, 45(08): 1095-1100. |
| [13] | 张志, 胡立生. 一类非线性控制系统性能基准的估计[J]. 上海交通大学学报(自然版), 2011, 45(08): 1101-1104. |
| [14] | 韩笑冬1, 薄翠梅2, 张登峰3. 基于线性矩阵不等式的卫星姿态鲁棒控制[J]. 上海交通大学学报(自然版), 2011, 45(08): 1146-1150. |
| [15] | 楚纪正, 杜彬, 陈娟. RTDA控制器参数性能分析及在线模糊自整定[J]. 上海交通大学学报(自然版), 2011, 45(08): 1167-1171. |
| 阅读次数 | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
全文 590
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
摘要 1442
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||