由于路面不平度和加减速、转弯等驾驶过程,车载精密仪器受到兼具移动和转动特征的多维振动激励.据统计,约有30%的车载精密仪器因多维振动损坏失效[1 ] .为实现多维振动有效控制,需引入与多维振动自由度数相匹配的隔振设备.浮筏、扭摆杆减振器等传统的多维隔振系统,虽在一定程度上实现了多自由度减振,但存在动力学特性不随外界激励变化而改变、隔振元件变形小、阻尼难以调节和配置等问题.
并联机构具有高刚度以及较高的运动精度和灵活度,以最少的主动关节实现多维运动输出,成为构建新型多维隔振系统的优势对象[2 4] .Wang等[5 ] 为降低立方Stewart隔振平台质量,提出一种新型双出杆磁流变阻尼器,建立并验证了多维隔振系统的动力学模型,研究表明,隔振系统能够实现6轴方向多维振动的有效衰减.Tang等[6 ] 通过Kane方法建立音圈电机驱动的Stewart隔振系统动力学模型,针对隔振系统线性和非线性部分,分别设计基于分散控制理论的线性控制器和基于改进鲁棒控制理论的非线性控制器,从而满足低频隔振的需求.Wei等[7 ] 基于螺旋理论获得一种新型4自由度并联机构用于救护车担架减振,研究了机构的奇异位姿,通过实验验证了隔振性能.Yang等[8 ] 通过伪刚体模型和虚功原理建立考虑连杆柔性的Stewart六轴隔振系统动力学模型,控制力由位姿反馈产生,能够实现6自由度多维振动的有效削弱.Zhao等[9 ] 提出一种3自由度多维隔振系统,采用滑模控制策略实时控制磁流变(MR)阻尼器的阻尼力输出,隔振系统能够实现水平、纵向和垂向多维振动的有效隔离.牛军川等[10 ] 建立基于变胞并联机构的多维隔振系统动力学方程,通过改变虎克副轴线的配置方式,实现了3自由度或4自由度多维振动的衰减.Li等[11 ] 提出一种5自由度并联隔振平台,建立隔振系统模糊最优半主动控制模型,通过实验验证了系统的隔振性能.张兵等[12 ] 提出液压冗余式主被动复合控制6自由度多维减振平台,采用模糊比例-积分-微分 (PID) 控制方法实现了多维振动抑制.Li等[13 ] 以隔振系统最小条件数为运动学优化目标,采用双四元数方法推导机构的齐次Jacobian矩阵并进行多目标优化,改善了多维隔振系统运动学指标.程明等[14 ] 以振动控制系统固有频率、静变形量为优化目标,通过多目标优化,提高了并联隔振系统的动力学性能.
上述研究表明了基于并联机构的多维隔振系统理论可行性.然而,诸如模型误差、未建模动态、被隔振物体的不同质量、弹簧和阻尼器的非线性特征等不确定因素引起的参数摄动量不可忽略,隔振系统在上述不确定因素影响下的振动抑制方法和隔振能力有待阐明.本文建立基于并联机构和磁流变阻尼器的多维隔振系统运动学和动力学模型,研究隔振系统在不确定因素影响下隔振能力的变化规律,提出兼具振动主动控制和被动控制优点且对不确定因素不敏感的鲁棒最优半主动控制策略,保证控制方法稳定并实现多维振动抑制.
1 多维隔振系统模型
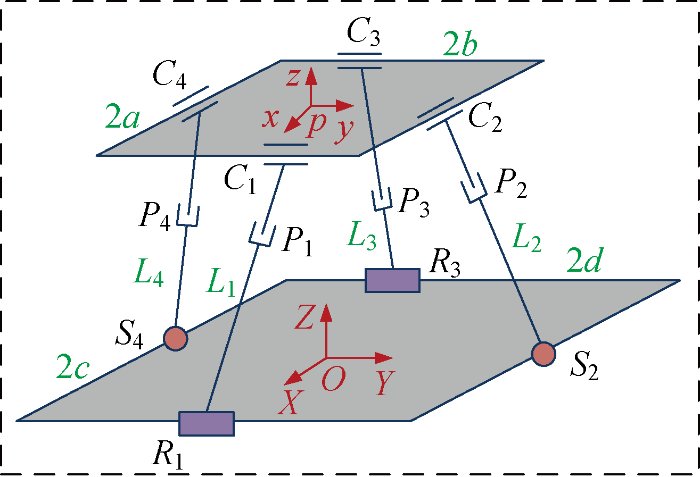
多维隔振系统的主体结构为2-RPC/2-SPC并联机构[15 ] ,由动平台、定平台和4条支链构成,如图1 所示.图中: Li (i=1, 2, 3, 4)为4条支链;R为转动副; P为移动副; S为球面副; C 为圆柱副.
图1
图1
2-RPC/2-SPC并联机构示意图
Fig.1
Schematic diagram of 2-RPC/2-SPC parallel mechanism
动平台和定平台均为矩形,长度分别为 2a×2b和2c×2d. 在动平台和定平台的形心处分别建立动坐标系p -xyz 和静坐标系O -XYZ .从定平台到动平台,4条支链对称布置:支链 L1 和L3 分别由R、P和C组成;支链L2 和L4 分别由S、P和C 组成.选取移动副为主动关节,在移动副布置4组弹簧和磁流变阻尼器,即可构造多维半主动隔振系统.根据修正的G-K公式[16 ] ,计算得到隔振系统自由度为4,分别为沿 x、 y、 z轴的平移运动和绕y 轴的旋转运动.
1.1 多维隔振系统运动学
在动和静坐标系中,点 Ci 可分别表示为Cpi 和COi ,那么COi =Ty Cpi ,Ty 为绕y 轴的旋转变换矩阵,
(1) T y = c o s θ 0 s i n θ x p 0 1 0 y p - s i n θ 0 c o s θ z p 0 0 0 1
式中: x p y p z p T θ 为绕y 轴的转角.移动副的长度li (i =1, 2, 3, 4) 可通过图1 并结合几何关系计算得到,
(2) l 1 2 = ( a c o s θ + x p - c ) 2 + y p 2 + ( - a s i n θ + z p ) 2 l 2 2 = x p 2 + ( b + y p - d ) 2 + z p 2 l 3 2 = ( - a c o s θ + x p + c ) 2 + y p 2 + ( a s i n θ + z p ) 2 l 4 2 = x p 2 + ( - b + y p + d ) 2 + z p 2
那么根据并联机构的输入- 输出关系,整理得到机构的Jacobian 逆矩阵,
(3) J - 1 = D 5 - d + x p D 1 y p D 1 z p - D 6 D 1 D 6 ( d - x p ) - D 5 z p D 1 x p D 2 a - c + y p D 2 z p D 2 0 - D 5 + d + x p D 3 y p D 3 z p + D 6 D 3 D 6 ( d + x p ) + D 5 z p D 3 x p D 4 - a + c + y p D 4 z p D 4 0
D 1 =(b cos θ -d +xp )2 +(zp -b sin θ )2 +y p 2
D 3 =(-b cos θ +d +xp )2 +(zp +b sin θ )2 +y p 2
1.2 多维隔振系统动力学
磁流变阻尼器为多维隔振系统的作动器,提供的阻尼力[17 ] 为
(4) F e = c e x · + F M R s g n ( x · ) c e = 2 π r L η h + 6 L η A p 2 π r h 3 F M R = 2 π r L + 3 L A p h τ y
式中: x · c e 为黏滞阻尼系数;F e 为阻尼力;F MR 为可控阻尼力;τ y 为剪切屈服强度,可表示为多项式函数的形式[18 ] ,
(5) τ y =a 4 B 4 +a 3 B 3 +a 2 B 2 +a 1 B +a 0
式中:B为磁感应强度.式(4)和式(5)中的其他参数和数值[19 ] 如表1 所示.
为便于求解,需对多维隔振系统的动力学建模过程进行适当合理的简化:定义动平台在平衡位置附近微幅振动,忽略重力势能;忽略各支链质量,仅考虑动平台质量.多维隔振系统的动力学模型可通过考虑阻尼耗散能的Lagrange 方程推导得到,
(6) M X ¨ + C e X ˙ + K X = Γ
式中: X =x p y p z p θ T M =diag(m p , m p , m p , Iy )为动平台惯量矩阵,m p 和Iy 分别为动平台质量和绕y 轴的转动惯量;K =G diag(k )G T 为刚度矩阵,k 为弹簧刚度;C e =G diag(c e )G T 为阻尼矩阵;G =J -T 为Jacobian 力矩阵;Γ 为广义力向量.
2 鲁棒最优半主动控制策略
多维隔振系统应用于车载精密仪器减振,由于路面不平度引起的随机激励可表示为白噪声的形式[20 ] :
(7) x ˙ i = - 2 π n 0 v e x i + 2 π n 1 w G q v e
式中: xi q e 0 和n1 分别为下截止频率和参考空间频率;w 为零均值的Gauss白噪声.实际工况下,路面随机振动经过悬架减振之后再输入到多维隔振系统.由于采用路面随机激励,在经过悬架减振之后其时域波形仍为随机信号,为简化分析过程,在此采用路面随机激励作为多维隔振系统的输入激励.
基于并联机构的多维隔振系统由不确定性引起的参数摄动量不可避免,在此,采用鲁棒最优半主动控制策略兼顾隔振系统振动控制效果和鲁棒性.定义 Z = [ X X ˙ ] T
(8) Z · = ( A + Δ A ) Z + ( B a + Δ B a ) U R + B x ¨ i Y = C 1 Z
式中:A 和ΔA 分别为系统矩阵的确定和不确定部分;B a 和ΔB a 分别表示控制矩阵的确定和不确定部分;B 为输入矩阵;C 1 为状态反馈矩阵;U R 为理想的鲁棒最优控制力向量;x ¨ i
(9) A = 0 I - M - 1 K - M - 1 C B a = 0 M - 1 G , B = 0 G
为求解理想鲁棒最优控制力向量,需确定式(8)中的不确定部分.不确定部分ΔA 和ΔB 通常可表示为范数有界的形式:
(10) Δ A Δ B = N F E 1 E 2
式中:N 、 E 1 和E 2 为常数矩阵;F 为不确定函数矩阵,且满足F T F ≤I ,I 为具有适当维数的单位矩阵.
(11) λ = ∫ t ∞ ( Z T Q Z + U R T R U R ) d t
式中: Q =diag(α K K , α M M )和R =β R I 分别为半正定和正定矩阵,α K 、 α M 和β R 为权重系数.那么理想鲁棒最优控制力向量可表示为
(12) U R =-G K Z
为确定鲁棒最优控制增益,需保证多维隔振系统为鲁棒最优控制系统[21 ] ,结合式(8)和式(11)可得,
(13) Q + G K T R G K + P [ A − B a G K + N F ( E 1 − E 2 G K ) ] + [ A − B a G K + N F ( E 1 − E 2 G K ) ] T P + γ − 2 P B B T P + C 1 C 1 T < 0
式(13)中存在难于求解的F ,根据文献[22 ],定义具有适当维数的矩阵S , 可得如下关系:
(14) S = Q + G K T R G K + P ( A − B a G K ) + ( A − B a G K ) T P + γ − 2 P B B T P + C 1 C 1 T
(15) S +εPNN T P +ε -1 (E 1 -E 2 G K )T (E 1 -E 2 G K )<0
式中:ε 为任意较小的正数.对式(15)应用Schur补引理[23 ] 可得:
(16) L 1 ( E 1 - E 2 G K ) T I G K T C 1 T P B T * - ε I 0 0 0 0 * * - Q - 1 0 0 0 * * * - R - 1 0 0 * * * * - I 0 * * * * * - γ 2 I < 0
式中: L 1 =P (A -B a G K )+(A -B a G K )T P +εPNN T P ; 符号“*”表示矩阵中的对称元素.
对式(16)分别左乘和右乘矩阵diag(P -1 , I , I , I , I , I ),式(16)可转变为
(17) L 2 ( E 1 X - E 2 W ) T P - 1 W T P - 1 C 1 T B * - ε I 0 0 0 0 * * - Q - 1 0 0 0 * * * - R - 1 0 0 * * * * - I 0 * * * * * - γ 2 I < 0
式中: L 2 =(AP -1 -B a W )+(AP -1 -B a W )T +εNN T ;W =G K P -1 .
定义系统的初始状态为X 0 ,线性二次型指标的期望值可表示为
(18) λ - = E ( λ ) ≤ t r ( P )
式中:tr (* )为矩阵的迹.为保证存在不确定因素的多维隔振系统上限值最小,可得到如下线性矩阵不等式:
(19) H I * P - 1 > 0
式中:H >P >0.那么鲁棒最优控制增益可通过求解如下线性矩阵不等式 (LMI) 得到:
(20) m i n ε , W , P - 1 t r ( H )
s . t . ε > 0 , γ > 0
P - 1 > 0 , H > 0
多维隔振系统的实际阻尼力可通过计算理想阻尼力并结合限界Hrovat 算法[24 ] 约束得到.限界Hrovat 算法可表示为
(21) F M R = F M R , m a x s g n ( x · ) , u i x · < 0 且 u i > F M R , m a x u i s g n ( x · ) - c e x · , u i x · < 0 且 u i < F M R , m a x F M R , m i n s g n ( x · ) , u i x · > 0
式中:FMR , max MR , min i (i=1, 2, 3, 4)为理想控制力.
3 算例分析
定义多维振动为沿x、 y、 z轴以及绕y轴的复合随机路面激励,那么振动控制系统的实际质量、刚度和阻尼系数可表示为
(22) m ' p = ( 1 + ω m ) m p k ' = ( 1 + ω k ) k c ' = ( 1 + ω c ) c
式中: ωm 、ωk 和ωc 分别表示质量、刚度和阻尼系数的不确定因子.在以下分析中,取ωm =ωk =ωc =10%. 仿真分析所需主要参数和数值[25 ] 如表2 所示.
为比较振动主动控制和振动半主动控制的隔振能力,均采用鲁棒最优半主动控制策略,振动半主动控制的实际阻尼力可由式(21)计算得到.结合式(7)、(8)、(12)和(20),以及表1 和表2 中的数据,采用Runge-Kuta方法求解得到存在质量、刚度和阻尼不确定因子时多维隔振系统的动平台时域速度输出.
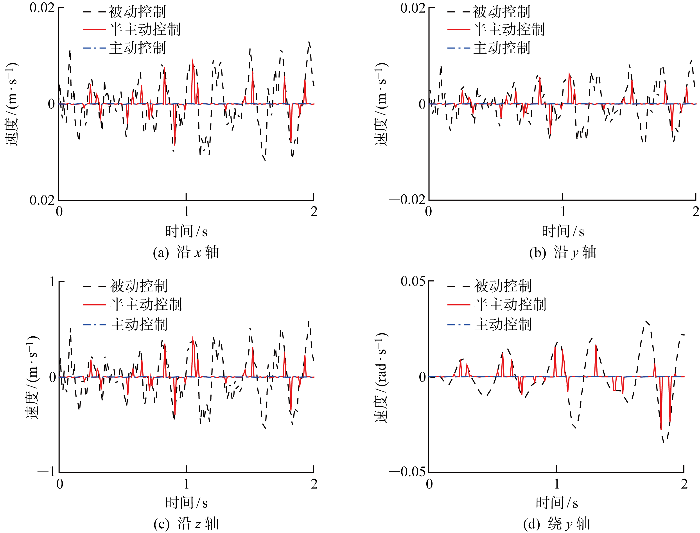
图2 为存在不确定因子时多维隔振系统动平台各方向的时域速度输出.为衡量鲁棒最优半主动控制策略的隔振能力,同时给出具有相同不确定因子的鲁棒最优主动控制和被动控制的图像.由图2 可得,振动主动控制具有最好的隔振效果,振动半主动控制的隔振能力介于振动主动控制和被动控制之间.由于限界Hrovat算法的约束,振动半主动控制图线在主动控制和被动控制之间不断切换.
图2
图2
存在不确定因子时动平台各方向时域速度输出
Fig.2
Output velocity of moving platform in different directions with uncertain factors in time domain
为定量比较多维半主动隔振系统的隔振性能,选用动平台输出速度的均方根 (RMS) 值作为评价指标.表3 为不同控制策略下动平台各方向速度输出的均方根值.与被动控制相比,振动半主动控制的均方根值在沿x 、 y 、 z 轴方向和绕y 轴方向分别降低了50.10%、 64.36%、 51.20%和68.57%,表明采用鲁棒最优半主动控制策略的多维隔振系统在不确定因素影响下各方向均表现出良好的隔振能力.
定义矩阵T =0 4 × 4 I 4 × 4
(23) X a ( ω ) = 1 j ω T [ j ω I − ( A + Δ A ) + ( B a + Δ B a ) G K ] − 1 B x i ( ω )
式中: x i (ω )为随机路面位移激励的频域形式;ω 为激励的圆频率;j =- 1 . 当矩阵B a 和ΔB a 为零矩阵时,式(23)将变为被动控制的频域位移输出:
(24) X p ( ω ) = 1 j ω T [ j ω I − ( A + Δ A ) ] − 1 B x i ( ω )
结合式(23)、式(24)以及限界Hrovat 算法,可以得到鲁棒最优半主动控制策略下的动平台频域位移输出.
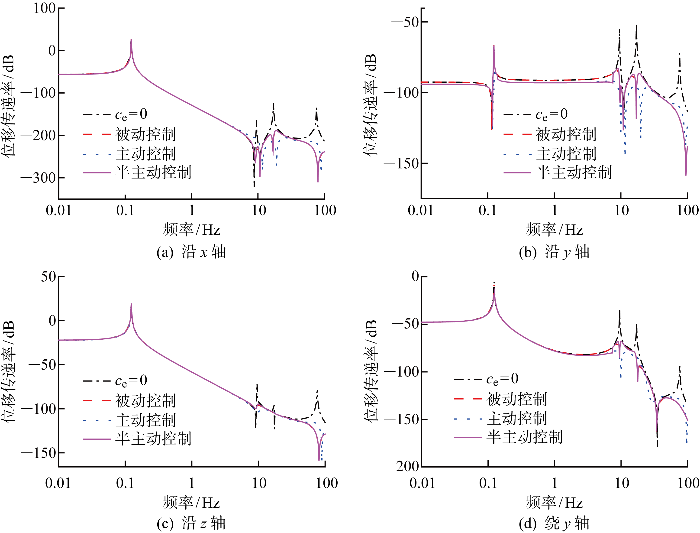
图3 为存在不确定因子时动平台在各方向的频域位移输出.为比较振动半主动控制效果,同时给出了主动控制、被动控制和无阻尼控制的动平台位移输出频域解.结合表2 中的数据,可以计算得到多维隔振系统的4阶固有频率分别为f1 =0.12 Hz , f2 =9.50 Hz , f3 =17.13 Hz , f4 =76.16 Hz ,分别与无阻尼控制的4阶共振峰横坐标值对应相等.该现象表明,当不考虑黏滞阻尼系数时,隔振系统的4阶共振峰被完全激发,验证了理论分析的正确性.鲁棒最优半主动控制能够对共振峰实现有效削弱,其隔振效果接近振动主动控制.由于在仿真分析中引入了不确定量,求解线性矩阵不等式获得的鲁棒最优控制增益具有保守性且并非全局最优,所以振动主动控制和半主动控制对第1阶共振峰削弱能力有限,优势不显著.受到限界Hrovat 算法约束,振动半主动控制在主动控制和被动控制之间不断切换.
图3
图3
存在不确定因子时动平台各方向频域位移输出
Fig.3
Output displacement of moving platform in different directions with uncertain factors in frequency domain
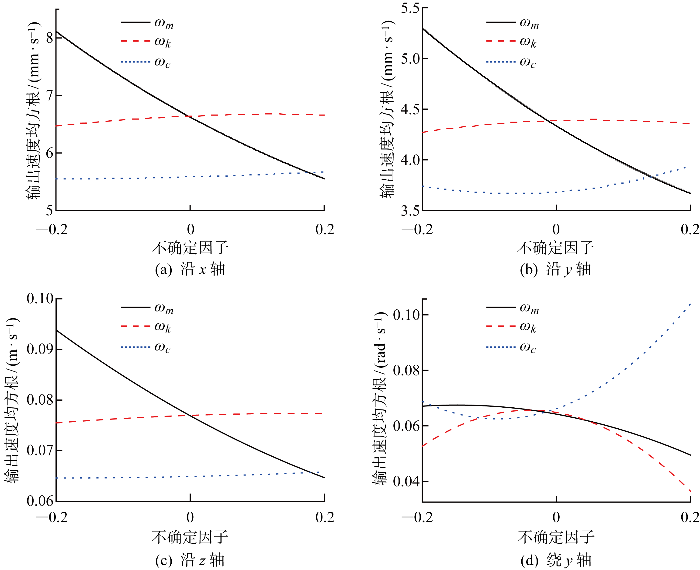
为研究质量、刚度、阻尼不确定因子变化对多维隔振系统隔振能力的影响规律,选取多维隔振系统动平台输出速度的均方根值为隔振性能评价指标,定义质量、刚度和阻尼不确定因子的变化范围为±20% ,求解得到隔振能力与不确定因子的关系.
图4 为存在不确定因子时动平台在各方向输出速度的均方根值,表明了隔振性能随质量、刚度和阻尼不确定因子的变化规律.各方向的隔振性能受质量不确定因子影响最显著且具有单调性,随着质量不确定因子的增大,隔振性能改善.隔振能力随刚度不确定因子的增大,先改善后逐渐恶化,在各方向上具有类似的变化趋势.隔振能力随阻尼不确定因子的增大表现出与刚度不确定因子相反的变化规律.随着刚度和阻尼不确定因子的逐渐增大,隔振性能在x、 y、 z轴方向较稳定,而绕y轴的隔振性能对上述变化最敏感.为保证良好的隔振效果,可在一定范围之内增大系统质量和刚度,上述结果可为多维隔振系统样机制作提供基础.
图4
图4
存在不确定因子时动平台各方向的速度均方根值
Fig.4
RMS values of moving platform in different directions with uncertain factors
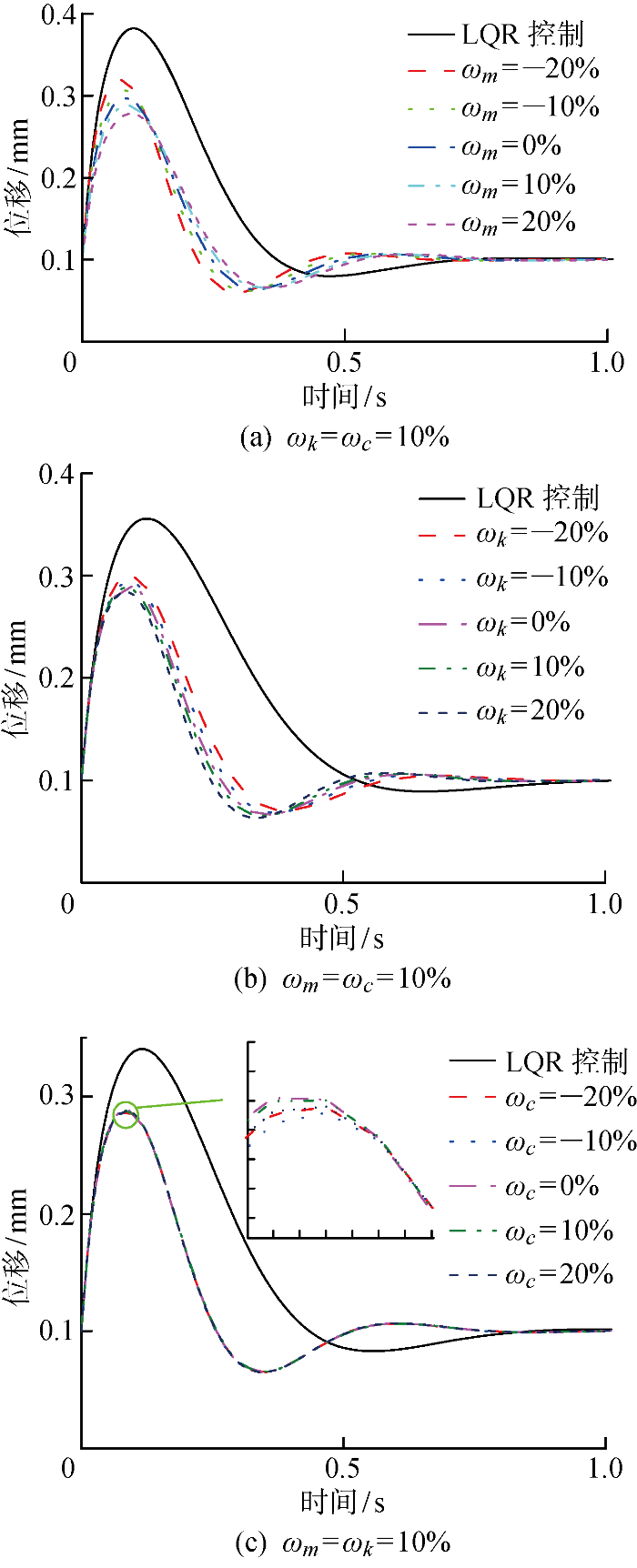
为阐明存在质量、刚度和阻尼不确定因子时多维隔振系统鲁棒最优半主动控制策略的有效性,与具有相同不确定因子的线性二次调节器 (LQR ) 半主动控制策略在阶跃激励下进行了对比研究.
图5 为考虑不同不确定因子时动平台在不同控制策略下的沿z向位移输出.依次固定质量、刚度和阻尼不确定因子中任意两个参数,研究另外一个不确定因子的变化对隔振能力的影响规律.在阶跃激励下,与LQR 半主动策略相比,鲁棒最优半主动控制策略的超调量更小,上升的时间更短;随着质量不确定因子的增大,输出位移的幅值逐渐减小,该现象表明隔振能力有所改善;随着刚度不确定因子的增大,输出位移的幅值逐渐减小;随着阻尼不确定因子的增加,输出位移的幅值逐渐降低;质量和刚度不确定因子的变化对隔振能力影响显著.因限于篇幅,仅给出存在不确定因子时动平台的z向输出位移,研究表明,其余方向的输出位移变化规律具有类似的结论.
图5
图5
动平台在不同不确定因子和控制策略下的z 向位移
Fig.5
Displacement of moving platform in z direction with different uncertain factors and control strategies
4 结论
建立了基于2-RPC/ 2-SPC 并联机构和磁流变阻尼器的多维隔振系统运动学和动力学模型,提出多维隔振系统鲁棒最优半主动控制策略,分别在时域和频域中研究存在质量、刚度和阻尼不确定因子的多维隔振系统隔振性能.研究结果表明:
(1) 当存在不确定因子时,采用鲁棒最优半主动控制策略的多维隔振系统能够实现沿x、 y、 z轴和绕y轴的多维振动有效衰减.
(2) 多维半主动隔振系统各方向的隔振能力受质量不确定因子影响最显著, 可在一定范围之内增大质量和系统刚度改善隔振效果.
(3) 在不确定因子影响下,采用鲁棒最优半主动控制策略的超调量和上升时间显著小于LQR 半主动策略的超调量和上升时间,表明了存在不确定因子时鲁棒最优半主动控制策略的有效性和稳定性.
参考文献
View Option
[1]
杜宁 , 胡明勇 , 毕勇 , 等 . 一种车载设备的低频水平减振方法
[J]. 振动与冲击 2017 , 36 (7 ): 184- 190.
[本文引用: 1]
DU Ning HU Mingyong BI Yong , et al A low frequency horizontal vibration reduction method for a vehicle-borne photoelectric instrument
[J]. Journal of Vibration and Shock 2017 , 36 (7 ): 184 -190 .
[本文引用: 1]
[2]
ZHANG Y GUO X D YU S J . Study on a four degrees-of-freedom multi-dimensional vibration isolation platform based on a 4-upu parallel mechanism
[J]. Transactions of the Canadian Society for Mechanical Engineering 2021 , 45 (4 ): 501 -512 .
[本文引用: 1]
[3]
BI F R MA T WANG X , et al Research on vibration control of seating system platform based on the cubic Stewart parallel mechanism
[J]. IEEE Access 2019 , 7 : 155637 -155649 .
[4]
GU H Y WEI C ZHANG Z M , et al Theoretical and experimental study on active stiffness control of a two-degrees-of-freedom rope driven parallel mechanism
[J]. Journal of Mechanisms and Robotics 2021 , 13 (1 ): 011018 .
[本文引用: 1]
[5]
WANG Q CHEN Z B AHMADIAN M , et al Parallel vibration isolation platform using magnetorheological technology
[J]. Applied Mechanics and Materials 2014 , 574 : 596 -602 .
[本文引用: 1]
[6]
TANG J CAO D Q YU T H . Decentralized vibration control of a voice coil motor-based Stewart parallel mechanism: Simulation and experiments
[J]. Proceedings of the Institution of Mechanical Engineers , Part C: Journal of Mechanical Engineering 2019 , 233 (1 ): 132 -145 .
[本文引用: 1]
[7]
WEI B C YUE Y ZHAO X C , et al Design and experiment of a novel 4-DOF vibration isolating system
[J]. International Journal of Robotics & Automation 2022 , 37 (2 ): 182 -191 .
[本文引用: 1]
[8]
YANG X L WU H T CHEN B , et al Dynamic modeling and decoupled control of a flexible Stewart platform for vibration isolation
[J]. Journal of Sound and Vibration 2019 , 439 : 398 -412 .
[本文引用: 1]
[9]
ZHAO W LI B LIU K F . Semi-active control for a multi-dimensional vibration isolator with parallel mechanism
[J]. Journal of Vibration and Control 2013 , 19 (6 ): 879 -888 .
[本文引用: 1]
[10]
牛军川 , 杨峰 , 李勇 . 基于变胞并联机构的多维隔振研究
[J]. 振动与冲击 2014 , 33 (7 ): 206 -209 .
[本文引用: 1]
NIU Junchuan YANG Feng LI Yong . Multi-dimensional vibration isolation based on metamorphic parallel mechanism
[J]. Journal of Vibration and Shock 2014 , 33 (7 ): 206 -209 .
[本文引用: 1]
[11]
LI B ZHAO W WANG S , et al Dynamic modeling and control for a five-dimensional hybrid vibration isolator based on a position/orientation decoupled parallel mechanism
[J]. Journal of Vibration and Control 2016 , 22 (15 ): 3368 -3383 .
[本文引用: 1]
[12]
张兵 , 黄华 , 蔡佳敏 , 等 . 冗余六自由度并联隔振平台多维隔振性能研究
[J]. 振动与冲击 2022 , 41 (2 ): 26 -32 .
[本文引用: 1]
ZHANG Bing HUANG Hua CAI Jiamin , et al Multi-dimensional isolation performances of a redundant 6DOF parallel vibration isolation platform
[J]. Journal of Vibration and Shock 2022 , 41 (2 ): 26 -32 .
[本文引用: 1]
[13]
LI Y YANG X L WU H T , et al Optimal design of a six-axis vibration isolator via Stewart platform by using homogeneous Jacobian matrix formulation based on dual quaternions
[J]. Journal of Mechanical Science and Technology 2018 , 32 (1 ): 11 -19 .
[本文引用: 1]
[14]
程明 , 陈照波 , 方宇娟 , 等 . 面向力学性能的并联隔振平台结构参数优化设计
[J]. 振动工程学报 2019 , 32 (1 ): 1 -9 .
[本文引用: 1]
CHENG Ming CHEN Zhaobo FANG Yujuan , et al Mechanical-performance-oriented optimization design of vibration isolation platform based on parallel mechanism
[J]. Journal of Vibration Engineering 2019 , 32 (1 ): 1 -9 .
[本文引用: 1]
[15]
杨明星 , 郭宗和 . 一种新型2-RPC/2-SPC并联机器人的机构分析与研究
[J]. 中国农机化学报 2014 , 35 (5 ): 200 -204 .
[本文引用: 1]
YANG Mingxing GUO Zonghe . Analysis and research on a new type of 2-RPC/2-SPC parallel robot mechanism
[J]. Journal of Chinese Agricultural Mechanization 2014 , 35 (5 ): 200 -204 .
[本文引用: 1]
[16]
QU H B ZHANG C L GUO S . Structural synthesis of a class of kinematically redundant parallel manipulators based on modified G-K criterion and RDOF criterion
[J]. Mechanism and Machine Theory 2018 , 130 : 47 -70 .
[本文引用: 1]
[17]
CHOI S B LEE H S PARK Y P . H ∞ control performance of a full-vehicle suspension featuring magneto-rheological dampers
[J]. Vehicle System Dynamics 2002 , 38 : 341 -360 .
[本文引用: 1]
[18]
胡国良 , 邓英俊 , 喻理梵 , 等 . 磁流变阻尼器多物理场耦合仿真及动力性能分析
[J]. 磁性材料及器件 2020 , 51 (6 ): 14 -21 .
[本文引用: 1]
HU Guoliang DENG Yingjun YU Lifan , et al Multi-physics coupling simulation and dynamic performance analysis of magnetorheological damper
[J]. Journal of Magnetic Materials and Devices 2020 , 51 (6 ): 14 -21 .
[本文引用: 1]
[19]
GAO X NIU J C LIU Z H , et al Infuluence characteristics of electrical parameters and vibration isolation properties of the stretcher system based on parallel mechanism and self-powered magneto-rheological damper
[J]. Journal of Vibration and Control 2020 , 26 (7/8 ): 552 -564 .
[本文引用: 3]
[20]
HU Y Q WANG X L QIN Y C , et al A robust hybrid generator for harvesting vehicle suspension vibration energy from random road excitation
[J]. Applied Energy 2022 , 309 : 118506 .
[本文引用: 1]
[21]
HE Y CHEN X A LIU Z . Active vibration control of motorized spindle based on mixed H ∞ /Kalman filter robust state feedback control
[J]. Journal of Vibration and Control 2019 , 25 : 1279 -1293 .
[本文引用: 1]
[22]
GUO L X ZHANG L P . Constrained active suspension control with parameter uncertainty for non-stationary running based on LMI optimization
[J]. Journal of Vibration Engineering & Technologies 2018 , 6 : 441 -451 .
[本文引用: 1]
[23]
GEERARDYN E OOMEN T . A local rational model approach for H ∞ estimation: With application to an active vibration isolation system
[J]. Control Engineering Practice 2017 , 68 : 63 -70 .
[本文引用: 1]
[24]
ZHOU Z MENG S P WU J , et al Semi-active control on long-span reticulated steel structures using MR dampers under multi-dimensional earthquake excitaions
[J]. Smart Strucutres and Systems 2012 , 10 (6 ): 557 -572 .
[本文引用: 1]
[25]
GAO X NIU J C LIU Z H , et al Semi-active control of ambulance stretcher system based on parallel mechanism with MR damper and perturbation analysis
[J]. International Journal of Mechanism and Materials in Design 2019 , 15 (4 ): 817 -831 .
[本文引用: 3]
一种车载设备的低频水平减振方法
1
2017
... 由于路面不平度和加减速、转弯等驾驶过程,车载精密仪器受到兼具移动和转动特征的多维振动激励.据统计,约有30%的车载精密仪器因多维振动损坏失效[1 ] .为实现多维振动有效控制,需引入与多维振动自由度数相匹配的隔振设备.浮筏、扭摆杆减振器等传统的多维隔振系统,虽在一定程度上实现了多自由度减振,但存在动力学特性不随外界激励变化而改变、隔振元件变形小、阻尼难以调节和配置等问题. ...
A low frequency horizontal vibration reduction method for a vehicle-borne photoelectric instrument
1
2017
... 由于路面不平度和加减速、转弯等驾驶过程,车载精密仪器受到兼具移动和转动特征的多维振动激励.据统计,约有30%的车载精密仪器因多维振动损坏失效[1 ] .为实现多维振动有效控制,需引入与多维振动自由度数相匹配的隔振设备.浮筏、扭摆杆减振器等传统的多维隔振系统,虽在一定程度上实现了多自由度减振,但存在动力学特性不随外界激励变化而改变、隔振元件变形小、阻尼难以调节和配置等问题. ...
Study on a four degrees-of-freedom multi-dimensional vibration isolation platform based on a 4-upu parallel mechanism
1
2021
... 并联机构具有高刚度以及较高的运动精度和灵活度,以最少的主动关节实现多维运动输出,成为构建新型多维隔振系统的优势对象[2 4 ] .Wang等[5 ] 为降低立方Stewart隔振平台质量,提出一种新型双出杆磁流变阻尼器,建立并验证了多维隔振系统的动力学模型,研究表明,隔振系统能够实现6轴方向多维振动的有效衰减.Tang等[6 ] 通过Kane方法建立音圈电机驱动的Stewart隔振系统动力学模型,针对隔振系统线性和非线性部分,分别设计基于分散控制理论的线性控制器和基于改进鲁棒控制理论的非线性控制器,从而满足低频隔振的需求.Wei等[7 ] 基于螺旋理论获得一种新型4自由度并联机构用于救护车担架减振,研究了机构的奇异位姿,通过实验验证了隔振性能.Yang等[8 ] 通过伪刚体模型和虚功原理建立考虑连杆柔性的Stewart六轴隔振系统动力学模型,控制力由位姿反馈产生,能够实现6自由度多维振动的有效削弱.Zhao等[9 ] 提出一种3自由度多维隔振系统,采用滑模控制策略实时控制磁流变(MR)阻尼器的阻尼力输出,隔振系统能够实现水平、纵向和垂向多维振动的有效隔离.牛军川等[10 ] 建立基于变胞并联机构的多维隔振系统动力学方程,通过改变虎克副轴线的配置方式,实现了3自由度或4自由度多维振动的衰减.Li等[11 ] 提出一种5自由度并联隔振平台,建立隔振系统模糊最优半主动控制模型,通过实验验证了系统的隔振性能.张兵等[12 ] 提出液压冗余式主被动复合控制6自由度多维减振平台,采用模糊比例-积分-微分 (PID) 控制方法实现了多维振动抑制.Li等[13 ] 以隔振系统最小条件数为运动学优化目标,采用双四元数方法推导机构的齐次Jacobian矩阵并进行多目标优化,改善了多维隔振系统运动学指标.程明等[14 ] 以振动控制系统固有频率、静变形量为优化目标,通过多目标优化,提高了并联隔振系统的动力学性能. ...
Research on vibration control of seating system platform based on the cubic Stewart parallel mechanism
0
2019
Theoretical and experimental study on active stiffness control of a two-degrees-of-freedom rope driven parallel mechanism
1
2021
... 并联机构具有高刚度以及较高的运动精度和灵活度,以最少的主动关节实现多维运动输出,成为构建新型多维隔振系统的优势对象[2 4 ] .Wang等[5 ] 为降低立方Stewart隔振平台质量,提出一种新型双出杆磁流变阻尼器,建立并验证了多维隔振系统的动力学模型,研究表明,隔振系统能够实现6轴方向多维振动的有效衰减.Tang等[6 ] 通过Kane方法建立音圈电机驱动的Stewart隔振系统动力学模型,针对隔振系统线性和非线性部分,分别设计基于分散控制理论的线性控制器和基于改进鲁棒控制理论的非线性控制器,从而满足低频隔振的需求.Wei等[7 ] 基于螺旋理论获得一种新型4自由度并联机构用于救护车担架减振,研究了机构的奇异位姿,通过实验验证了隔振性能.Yang等[8 ] 通过伪刚体模型和虚功原理建立考虑连杆柔性的Stewart六轴隔振系统动力学模型,控制力由位姿反馈产生,能够实现6自由度多维振动的有效削弱.Zhao等[9 ] 提出一种3自由度多维隔振系统,采用滑模控制策略实时控制磁流变(MR)阻尼器的阻尼力输出,隔振系统能够实现水平、纵向和垂向多维振动的有效隔离.牛军川等[10 ] 建立基于变胞并联机构的多维隔振系统动力学方程,通过改变虎克副轴线的配置方式,实现了3自由度或4自由度多维振动的衰减.Li等[11 ] 提出一种5自由度并联隔振平台,建立隔振系统模糊最优半主动控制模型,通过实验验证了系统的隔振性能.张兵等[12 ] 提出液压冗余式主被动复合控制6自由度多维减振平台,采用模糊比例-积分-微分 (PID) 控制方法实现了多维振动抑制.Li等[13 ] 以隔振系统最小条件数为运动学优化目标,采用双四元数方法推导机构的齐次Jacobian矩阵并进行多目标优化,改善了多维隔振系统运动学指标.程明等[14 ] 以振动控制系统固有频率、静变形量为优化目标,通过多目标优化,提高了并联隔振系统的动力学性能. ...
Parallel vibration isolation platform using magnetorheological technology
1
2014
... 并联机构具有高刚度以及较高的运动精度和灵活度,以最少的主动关节实现多维运动输出,成为构建新型多维隔振系统的优势对象[2 4 ] .Wang等[5 ] 为降低立方Stewart隔振平台质量,提出一种新型双出杆磁流变阻尼器,建立并验证了多维隔振系统的动力学模型,研究表明,隔振系统能够实现6轴方向多维振动的有效衰减.Tang等[6 ] 通过Kane方法建立音圈电机驱动的Stewart隔振系统动力学模型,针对隔振系统线性和非线性部分,分别设计基于分散控制理论的线性控制器和基于改进鲁棒控制理论的非线性控制器,从而满足低频隔振的需求.Wei等[7 ] 基于螺旋理论获得一种新型4自由度并联机构用于救护车担架减振,研究了机构的奇异位姿,通过实验验证了隔振性能.Yang等[8 ] 通过伪刚体模型和虚功原理建立考虑连杆柔性的Stewart六轴隔振系统动力学模型,控制力由位姿反馈产生,能够实现6自由度多维振动的有效削弱.Zhao等[9 ] 提出一种3自由度多维隔振系统,采用滑模控制策略实时控制磁流变(MR)阻尼器的阻尼力输出,隔振系统能够实现水平、纵向和垂向多维振动的有效隔离.牛军川等[10 ] 建立基于变胞并联机构的多维隔振系统动力学方程,通过改变虎克副轴线的配置方式,实现了3自由度或4自由度多维振动的衰减.Li等[11 ] 提出一种5自由度并联隔振平台,建立隔振系统模糊最优半主动控制模型,通过实验验证了系统的隔振性能.张兵等[12 ] 提出液压冗余式主被动复合控制6自由度多维减振平台,采用模糊比例-积分-微分 (PID) 控制方法实现了多维振动抑制.Li等[13 ] 以隔振系统最小条件数为运动学优化目标,采用双四元数方法推导机构的齐次Jacobian矩阵并进行多目标优化,改善了多维隔振系统运动学指标.程明等[14 ] 以振动控制系统固有频率、静变形量为优化目标,通过多目标优化,提高了并联隔振系统的动力学性能. ...
Decentralized vibration control of a voice coil motor-based Stewart parallel mechanism: Simulation and experiments
1
2019
... 并联机构具有高刚度以及较高的运动精度和灵活度,以最少的主动关节实现多维运动输出,成为构建新型多维隔振系统的优势对象[2 4 ] .Wang等[5 ] 为降低立方Stewart隔振平台质量,提出一种新型双出杆磁流变阻尼器,建立并验证了多维隔振系统的动力学模型,研究表明,隔振系统能够实现6轴方向多维振动的有效衰减.Tang等[6 ] 通过Kane方法建立音圈电机驱动的Stewart隔振系统动力学模型,针对隔振系统线性和非线性部分,分别设计基于分散控制理论的线性控制器和基于改进鲁棒控制理论的非线性控制器,从而满足低频隔振的需求.Wei等[7 ] 基于螺旋理论获得一种新型4自由度并联机构用于救护车担架减振,研究了机构的奇异位姿,通过实验验证了隔振性能.Yang等[8 ] 通过伪刚体模型和虚功原理建立考虑连杆柔性的Stewart六轴隔振系统动力学模型,控制力由位姿反馈产生,能够实现6自由度多维振动的有效削弱.Zhao等[9 ] 提出一种3自由度多维隔振系统,采用滑模控制策略实时控制磁流变(MR)阻尼器的阻尼力输出,隔振系统能够实现水平、纵向和垂向多维振动的有效隔离.牛军川等[10 ] 建立基于变胞并联机构的多维隔振系统动力学方程,通过改变虎克副轴线的配置方式,实现了3自由度或4自由度多维振动的衰减.Li等[11 ] 提出一种5自由度并联隔振平台,建立隔振系统模糊最优半主动控制模型,通过实验验证了系统的隔振性能.张兵等[12 ] 提出液压冗余式主被动复合控制6自由度多维减振平台,采用模糊比例-积分-微分 (PID) 控制方法实现了多维振动抑制.Li等[13 ] 以隔振系统最小条件数为运动学优化目标,采用双四元数方法推导机构的齐次Jacobian矩阵并进行多目标优化,改善了多维隔振系统运动学指标.程明等[14 ] 以振动控制系统固有频率、静变形量为优化目标,通过多目标优化,提高了并联隔振系统的动力学性能. ...
Design and experiment of a novel 4-DOF vibration isolating system
1
2022
... 并联机构具有高刚度以及较高的运动精度和灵活度,以最少的主动关节实现多维运动输出,成为构建新型多维隔振系统的优势对象[2 4 ] .Wang等[5 ] 为降低立方Stewart隔振平台质量,提出一种新型双出杆磁流变阻尼器,建立并验证了多维隔振系统的动力学模型,研究表明,隔振系统能够实现6轴方向多维振动的有效衰减.Tang等[6 ] 通过Kane方法建立音圈电机驱动的Stewart隔振系统动力学模型,针对隔振系统线性和非线性部分,分别设计基于分散控制理论的线性控制器和基于改进鲁棒控制理论的非线性控制器,从而满足低频隔振的需求.Wei等[7 ] 基于螺旋理论获得一种新型4自由度并联机构用于救护车担架减振,研究了机构的奇异位姿,通过实验验证了隔振性能.Yang等[8 ] 通过伪刚体模型和虚功原理建立考虑连杆柔性的Stewart六轴隔振系统动力学模型,控制力由位姿反馈产生,能够实现6自由度多维振动的有效削弱.Zhao等[9 ] 提出一种3自由度多维隔振系统,采用滑模控制策略实时控制磁流变(MR)阻尼器的阻尼力输出,隔振系统能够实现水平、纵向和垂向多维振动的有效隔离.牛军川等[10 ] 建立基于变胞并联机构的多维隔振系统动力学方程,通过改变虎克副轴线的配置方式,实现了3自由度或4自由度多维振动的衰减.Li等[11 ] 提出一种5自由度并联隔振平台,建立隔振系统模糊最优半主动控制模型,通过实验验证了系统的隔振性能.张兵等[12 ] 提出液压冗余式主被动复合控制6自由度多维减振平台,采用模糊比例-积分-微分 (PID) 控制方法实现了多维振动抑制.Li等[13 ] 以隔振系统最小条件数为运动学优化目标,采用双四元数方法推导机构的齐次Jacobian矩阵并进行多目标优化,改善了多维隔振系统运动学指标.程明等[14 ] 以振动控制系统固有频率、静变形量为优化目标,通过多目标优化,提高了并联隔振系统的动力学性能. ...
Dynamic modeling and decoupled control of a flexible Stewart platform for vibration isolation
1
2019
... 并联机构具有高刚度以及较高的运动精度和灵活度,以最少的主动关节实现多维运动输出,成为构建新型多维隔振系统的优势对象[2 4 ] .Wang等[5 ] 为降低立方Stewart隔振平台质量,提出一种新型双出杆磁流变阻尼器,建立并验证了多维隔振系统的动力学模型,研究表明,隔振系统能够实现6轴方向多维振动的有效衰减.Tang等[6 ] 通过Kane方法建立音圈电机驱动的Stewart隔振系统动力学模型,针对隔振系统线性和非线性部分,分别设计基于分散控制理论的线性控制器和基于改进鲁棒控制理论的非线性控制器,从而满足低频隔振的需求.Wei等[7 ] 基于螺旋理论获得一种新型4自由度并联机构用于救护车担架减振,研究了机构的奇异位姿,通过实验验证了隔振性能.Yang等[8 ] 通过伪刚体模型和虚功原理建立考虑连杆柔性的Stewart六轴隔振系统动力学模型,控制力由位姿反馈产生,能够实现6自由度多维振动的有效削弱.Zhao等[9 ] 提出一种3自由度多维隔振系统,采用滑模控制策略实时控制磁流变(MR)阻尼器的阻尼力输出,隔振系统能够实现水平、纵向和垂向多维振动的有效隔离.牛军川等[10 ] 建立基于变胞并联机构的多维隔振系统动力学方程,通过改变虎克副轴线的配置方式,实现了3自由度或4自由度多维振动的衰减.Li等[11 ] 提出一种5自由度并联隔振平台,建立隔振系统模糊最优半主动控制模型,通过实验验证了系统的隔振性能.张兵等[12 ] 提出液压冗余式主被动复合控制6自由度多维减振平台,采用模糊比例-积分-微分 (PID) 控制方法实现了多维振动抑制.Li等[13 ] 以隔振系统最小条件数为运动学优化目标,采用双四元数方法推导机构的齐次Jacobian矩阵并进行多目标优化,改善了多维隔振系统运动学指标.程明等[14 ] 以振动控制系统固有频率、静变形量为优化目标,通过多目标优化,提高了并联隔振系统的动力学性能. ...
Semi-active control for a multi-dimensional vibration isolator with parallel mechanism
1
2013
... 并联机构具有高刚度以及较高的运动精度和灵活度,以最少的主动关节实现多维运动输出,成为构建新型多维隔振系统的优势对象[2 4 ] .Wang等[5 ] 为降低立方Stewart隔振平台质量,提出一种新型双出杆磁流变阻尼器,建立并验证了多维隔振系统的动力学模型,研究表明,隔振系统能够实现6轴方向多维振动的有效衰减.Tang等[6 ] 通过Kane方法建立音圈电机驱动的Stewart隔振系统动力学模型,针对隔振系统线性和非线性部分,分别设计基于分散控制理论的线性控制器和基于改进鲁棒控制理论的非线性控制器,从而满足低频隔振的需求.Wei等[7 ] 基于螺旋理论获得一种新型4自由度并联机构用于救护车担架减振,研究了机构的奇异位姿,通过实验验证了隔振性能.Yang等[8 ] 通过伪刚体模型和虚功原理建立考虑连杆柔性的Stewart六轴隔振系统动力学模型,控制力由位姿反馈产生,能够实现6自由度多维振动的有效削弱.Zhao等[9 ] 提出一种3自由度多维隔振系统,采用滑模控制策略实时控制磁流变(MR)阻尼器的阻尼力输出,隔振系统能够实现水平、纵向和垂向多维振动的有效隔离.牛军川等[10 ] 建立基于变胞并联机构的多维隔振系统动力学方程,通过改变虎克副轴线的配置方式,实现了3自由度或4自由度多维振动的衰减.Li等[11 ] 提出一种5自由度并联隔振平台,建立隔振系统模糊最优半主动控制模型,通过实验验证了系统的隔振性能.张兵等[12 ] 提出液压冗余式主被动复合控制6自由度多维减振平台,采用模糊比例-积分-微分 (PID) 控制方法实现了多维振动抑制.Li等[13 ] 以隔振系统最小条件数为运动学优化目标,采用双四元数方法推导机构的齐次Jacobian矩阵并进行多目标优化,改善了多维隔振系统运动学指标.程明等[14 ] 以振动控制系统固有频率、静变形量为优化目标,通过多目标优化,提高了并联隔振系统的动力学性能. ...
基于变胞并联机构的多维隔振研究
1
2014
... 并联机构具有高刚度以及较高的运动精度和灵活度,以最少的主动关节实现多维运动输出,成为构建新型多维隔振系统的优势对象[2 4 ] .Wang等[5 ] 为降低立方Stewart隔振平台质量,提出一种新型双出杆磁流变阻尼器,建立并验证了多维隔振系统的动力学模型,研究表明,隔振系统能够实现6轴方向多维振动的有效衰减.Tang等[6 ] 通过Kane方法建立音圈电机驱动的Stewart隔振系统动力学模型,针对隔振系统线性和非线性部分,分别设计基于分散控制理论的线性控制器和基于改进鲁棒控制理论的非线性控制器,从而满足低频隔振的需求.Wei等[7 ] 基于螺旋理论获得一种新型4自由度并联机构用于救护车担架减振,研究了机构的奇异位姿,通过实验验证了隔振性能.Yang等[8 ] 通过伪刚体模型和虚功原理建立考虑连杆柔性的Stewart六轴隔振系统动力学模型,控制力由位姿反馈产生,能够实现6自由度多维振动的有效削弱.Zhao等[9 ] 提出一种3自由度多维隔振系统,采用滑模控制策略实时控制磁流变(MR)阻尼器的阻尼力输出,隔振系统能够实现水平、纵向和垂向多维振动的有效隔离.牛军川等[10 ] 建立基于变胞并联机构的多维隔振系统动力学方程,通过改变虎克副轴线的配置方式,实现了3自由度或4自由度多维振动的衰减.Li等[11 ] 提出一种5自由度并联隔振平台,建立隔振系统模糊最优半主动控制模型,通过实验验证了系统的隔振性能.张兵等[12 ] 提出液压冗余式主被动复合控制6自由度多维减振平台,采用模糊比例-积分-微分 (PID) 控制方法实现了多维振动抑制.Li等[13 ] 以隔振系统最小条件数为运动学优化目标,采用双四元数方法推导机构的齐次Jacobian矩阵并进行多目标优化,改善了多维隔振系统运动学指标.程明等[14 ] 以振动控制系统固有频率、静变形量为优化目标,通过多目标优化,提高了并联隔振系统的动力学性能. ...
Multi-dimensional vibration isolation based on metamorphic parallel mechanism
1
2014
... 并联机构具有高刚度以及较高的运动精度和灵活度,以最少的主动关节实现多维运动输出,成为构建新型多维隔振系统的优势对象[2 4 ] .Wang等[5 ] 为降低立方Stewart隔振平台质量,提出一种新型双出杆磁流变阻尼器,建立并验证了多维隔振系统的动力学模型,研究表明,隔振系统能够实现6轴方向多维振动的有效衰减.Tang等[6 ] 通过Kane方法建立音圈电机驱动的Stewart隔振系统动力学模型,针对隔振系统线性和非线性部分,分别设计基于分散控制理论的线性控制器和基于改进鲁棒控制理论的非线性控制器,从而满足低频隔振的需求.Wei等[7 ] 基于螺旋理论获得一种新型4自由度并联机构用于救护车担架减振,研究了机构的奇异位姿,通过实验验证了隔振性能.Yang等[8 ] 通过伪刚体模型和虚功原理建立考虑连杆柔性的Stewart六轴隔振系统动力学模型,控制力由位姿反馈产生,能够实现6自由度多维振动的有效削弱.Zhao等[9 ] 提出一种3自由度多维隔振系统,采用滑模控制策略实时控制磁流变(MR)阻尼器的阻尼力输出,隔振系统能够实现水平、纵向和垂向多维振动的有效隔离.牛军川等[10 ] 建立基于变胞并联机构的多维隔振系统动力学方程,通过改变虎克副轴线的配置方式,实现了3自由度或4自由度多维振动的衰减.Li等[11 ] 提出一种5自由度并联隔振平台,建立隔振系统模糊最优半主动控制模型,通过实验验证了系统的隔振性能.张兵等[12 ] 提出液压冗余式主被动复合控制6自由度多维减振平台,采用模糊比例-积分-微分 (PID) 控制方法实现了多维振动抑制.Li等[13 ] 以隔振系统最小条件数为运动学优化目标,采用双四元数方法推导机构的齐次Jacobian矩阵并进行多目标优化,改善了多维隔振系统运动学指标.程明等[14 ] 以振动控制系统固有频率、静变形量为优化目标,通过多目标优化,提高了并联隔振系统的动力学性能. ...
Dynamic modeling and control for a five-dimensional hybrid vibration isolator based on a position/orientation decoupled parallel mechanism
1
2016
... 并联机构具有高刚度以及较高的运动精度和灵活度,以最少的主动关节实现多维运动输出,成为构建新型多维隔振系统的优势对象[2 4 ] .Wang等[5 ] 为降低立方Stewart隔振平台质量,提出一种新型双出杆磁流变阻尼器,建立并验证了多维隔振系统的动力学模型,研究表明,隔振系统能够实现6轴方向多维振动的有效衰减.Tang等[6 ] 通过Kane方法建立音圈电机驱动的Stewart隔振系统动力学模型,针对隔振系统线性和非线性部分,分别设计基于分散控制理论的线性控制器和基于改进鲁棒控制理论的非线性控制器,从而满足低频隔振的需求.Wei等[7 ] 基于螺旋理论获得一种新型4自由度并联机构用于救护车担架减振,研究了机构的奇异位姿,通过实验验证了隔振性能.Yang等[8 ] 通过伪刚体模型和虚功原理建立考虑连杆柔性的Stewart六轴隔振系统动力学模型,控制力由位姿反馈产生,能够实现6自由度多维振动的有效削弱.Zhao等[9 ] 提出一种3自由度多维隔振系统,采用滑模控制策略实时控制磁流变(MR)阻尼器的阻尼力输出,隔振系统能够实现水平、纵向和垂向多维振动的有效隔离.牛军川等[10 ] 建立基于变胞并联机构的多维隔振系统动力学方程,通过改变虎克副轴线的配置方式,实现了3自由度或4自由度多维振动的衰减.Li等[11 ] 提出一种5自由度并联隔振平台,建立隔振系统模糊最优半主动控制模型,通过实验验证了系统的隔振性能.张兵等[12 ] 提出液压冗余式主被动复合控制6自由度多维减振平台,采用模糊比例-积分-微分 (PID) 控制方法实现了多维振动抑制.Li等[13 ] 以隔振系统最小条件数为运动学优化目标,采用双四元数方法推导机构的齐次Jacobian矩阵并进行多目标优化,改善了多维隔振系统运动学指标.程明等[14 ] 以振动控制系统固有频率、静变形量为优化目标,通过多目标优化,提高了并联隔振系统的动力学性能. ...
冗余六自由度并联隔振平台多维隔振性能研究
1
2022
... 并联机构具有高刚度以及较高的运动精度和灵活度,以最少的主动关节实现多维运动输出,成为构建新型多维隔振系统的优势对象[2 4 ] .Wang等[5 ] 为降低立方Stewart隔振平台质量,提出一种新型双出杆磁流变阻尼器,建立并验证了多维隔振系统的动力学模型,研究表明,隔振系统能够实现6轴方向多维振动的有效衰减.Tang等[6 ] 通过Kane方法建立音圈电机驱动的Stewart隔振系统动力学模型,针对隔振系统线性和非线性部分,分别设计基于分散控制理论的线性控制器和基于改进鲁棒控制理论的非线性控制器,从而满足低频隔振的需求.Wei等[7 ] 基于螺旋理论获得一种新型4自由度并联机构用于救护车担架减振,研究了机构的奇异位姿,通过实验验证了隔振性能.Yang等[8 ] 通过伪刚体模型和虚功原理建立考虑连杆柔性的Stewart六轴隔振系统动力学模型,控制力由位姿反馈产生,能够实现6自由度多维振动的有效削弱.Zhao等[9 ] 提出一种3自由度多维隔振系统,采用滑模控制策略实时控制磁流变(MR)阻尼器的阻尼力输出,隔振系统能够实现水平、纵向和垂向多维振动的有效隔离.牛军川等[10 ] 建立基于变胞并联机构的多维隔振系统动力学方程,通过改变虎克副轴线的配置方式,实现了3自由度或4自由度多维振动的衰减.Li等[11 ] 提出一种5自由度并联隔振平台,建立隔振系统模糊最优半主动控制模型,通过实验验证了系统的隔振性能.张兵等[12 ] 提出液压冗余式主被动复合控制6自由度多维减振平台,采用模糊比例-积分-微分 (PID) 控制方法实现了多维振动抑制.Li等[13 ] 以隔振系统最小条件数为运动学优化目标,采用双四元数方法推导机构的齐次Jacobian矩阵并进行多目标优化,改善了多维隔振系统运动学指标.程明等[14 ] 以振动控制系统固有频率、静变形量为优化目标,通过多目标优化,提高了并联隔振系统的动力学性能. ...
Multi-dimensional isolation performances of a redundant 6DOF parallel vibration isolation platform
1
2022
... 并联机构具有高刚度以及较高的运动精度和灵活度,以最少的主动关节实现多维运动输出,成为构建新型多维隔振系统的优势对象[2 4 ] .Wang等[5 ] 为降低立方Stewart隔振平台质量,提出一种新型双出杆磁流变阻尼器,建立并验证了多维隔振系统的动力学模型,研究表明,隔振系统能够实现6轴方向多维振动的有效衰减.Tang等[6 ] 通过Kane方法建立音圈电机驱动的Stewart隔振系统动力学模型,针对隔振系统线性和非线性部分,分别设计基于分散控制理论的线性控制器和基于改进鲁棒控制理论的非线性控制器,从而满足低频隔振的需求.Wei等[7 ] 基于螺旋理论获得一种新型4自由度并联机构用于救护车担架减振,研究了机构的奇异位姿,通过实验验证了隔振性能.Yang等[8 ] 通过伪刚体模型和虚功原理建立考虑连杆柔性的Stewart六轴隔振系统动力学模型,控制力由位姿反馈产生,能够实现6自由度多维振动的有效削弱.Zhao等[9 ] 提出一种3自由度多维隔振系统,采用滑模控制策略实时控制磁流变(MR)阻尼器的阻尼力输出,隔振系统能够实现水平、纵向和垂向多维振动的有效隔离.牛军川等[10 ] 建立基于变胞并联机构的多维隔振系统动力学方程,通过改变虎克副轴线的配置方式,实现了3自由度或4自由度多维振动的衰减.Li等[11 ] 提出一种5自由度并联隔振平台,建立隔振系统模糊最优半主动控制模型,通过实验验证了系统的隔振性能.张兵等[12 ] 提出液压冗余式主被动复合控制6自由度多维减振平台,采用模糊比例-积分-微分 (PID) 控制方法实现了多维振动抑制.Li等[13 ] 以隔振系统最小条件数为运动学优化目标,采用双四元数方法推导机构的齐次Jacobian矩阵并进行多目标优化,改善了多维隔振系统运动学指标.程明等[14 ] 以振动控制系统固有频率、静变形量为优化目标,通过多目标优化,提高了并联隔振系统的动力学性能. ...
Optimal design of a six-axis vibration isolator via Stewart platform by using homogeneous Jacobian matrix formulation based on dual quaternions
1
2018
... 并联机构具有高刚度以及较高的运动精度和灵活度,以最少的主动关节实现多维运动输出,成为构建新型多维隔振系统的优势对象[2 4 ] .Wang等[5 ] 为降低立方Stewart隔振平台质量,提出一种新型双出杆磁流变阻尼器,建立并验证了多维隔振系统的动力学模型,研究表明,隔振系统能够实现6轴方向多维振动的有效衰减.Tang等[6 ] 通过Kane方法建立音圈电机驱动的Stewart隔振系统动力学模型,针对隔振系统线性和非线性部分,分别设计基于分散控制理论的线性控制器和基于改进鲁棒控制理论的非线性控制器,从而满足低频隔振的需求.Wei等[7 ] 基于螺旋理论获得一种新型4自由度并联机构用于救护车担架减振,研究了机构的奇异位姿,通过实验验证了隔振性能.Yang等[8 ] 通过伪刚体模型和虚功原理建立考虑连杆柔性的Stewart六轴隔振系统动力学模型,控制力由位姿反馈产生,能够实现6自由度多维振动的有效削弱.Zhao等[9 ] 提出一种3自由度多维隔振系统,采用滑模控制策略实时控制磁流变(MR)阻尼器的阻尼力输出,隔振系统能够实现水平、纵向和垂向多维振动的有效隔离.牛军川等[10 ] 建立基于变胞并联机构的多维隔振系统动力学方程,通过改变虎克副轴线的配置方式,实现了3自由度或4自由度多维振动的衰减.Li等[11 ] 提出一种5自由度并联隔振平台,建立隔振系统模糊最优半主动控制模型,通过实验验证了系统的隔振性能.张兵等[12 ] 提出液压冗余式主被动复合控制6自由度多维减振平台,采用模糊比例-积分-微分 (PID) 控制方法实现了多维振动抑制.Li等[13 ] 以隔振系统最小条件数为运动学优化目标,采用双四元数方法推导机构的齐次Jacobian矩阵并进行多目标优化,改善了多维隔振系统运动学指标.程明等[14 ] 以振动控制系统固有频率、静变形量为优化目标,通过多目标优化,提高了并联隔振系统的动力学性能. ...
面向力学性能的并联隔振平台结构参数优化设计
1
2019
... 并联机构具有高刚度以及较高的运动精度和灵活度,以最少的主动关节实现多维运动输出,成为构建新型多维隔振系统的优势对象[2 4 ] .Wang等[5 ] 为降低立方Stewart隔振平台质量,提出一种新型双出杆磁流变阻尼器,建立并验证了多维隔振系统的动力学模型,研究表明,隔振系统能够实现6轴方向多维振动的有效衰减.Tang等[6 ] 通过Kane方法建立音圈电机驱动的Stewart隔振系统动力学模型,针对隔振系统线性和非线性部分,分别设计基于分散控制理论的线性控制器和基于改进鲁棒控制理论的非线性控制器,从而满足低频隔振的需求.Wei等[7 ] 基于螺旋理论获得一种新型4自由度并联机构用于救护车担架减振,研究了机构的奇异位姿,通过实验验证了隔振性能.Yang等[8 ] 通过伪刚体模型和虚功原理建立考虑连杆柔性的Stewart六轴隔振系统动力学模型,控制力由位姿反馈产生,能够实现6自由度多维振动的有效削弱.Zhao等[9 ] 提出一种3自由度多维隔振系统,采用滑模控制策略实时控制磁流变(MR)阻尼器的阻尼力输出,隔振系统能够实现水平、纵向和垂向多维振动的有效隔离.牛军川等[10 ] 建立基于变胞并联机构的多维隔振系统动力学方程,通过改变虎克副轴线的配置方式,实现了3自由度或4自由度多维振动的衰减.Li等[11 ] 提出一种5自由度并联隔振平台,建立隔振系统模糊最优半主动控制模型,通过实验验证了系统的隔振性能.张兵等[12 ] 提出液压冗余式主被动复合控制6自由度多维减振平台,采用模糊比例-积分-微分 (PID) 控制方法实现了多维振动抑制.Li等[13 ] 以隔振系统最小条件数为运动学优化目标,采用双四元数方法推导机构的齐次Jacobian矩阵并进行多目标优化,改善了多维隔振系统运动学指标.程明等[14 ] 以振动控制系统固有频率、静变形量为优化目标,通过多目标优化,提高了并联隔振系统的动力学性能. ...
Mechanical-performance-oriented optimization design of vibration isolation platform based on parallel mechanism
1
2019
... 并联机构具有高刚度以及较高的运动精度和灵活度,以最少的主动关节实现多维运动输出,成为构建新型多维隔振系统的优势对象[2 4 ] .Wang等[5 ] 为降低立方Stewart隔振平台质量,提出一种新型双出杆磁流变阻尼器,建立并验证了多维隔振系统的动力学模型,研究表明,隔振系统能够实现6轴方向多维振动的有效衰减.Tang等[6 ] 通过Kane方法建立音圈电机驱动的Stewart隔振系统动力学模型,针对隔振系统线性和非线性部分,分别设计基于分散控制理论的线性控制器和基于改进鲁棒控制理论的非线性控制器,从而满足低频隔振的需求.Wei等[7 ] 基于螺旋理论获得一种新型4自由度并联机构用于救护车担架减振,研究了机构的奇异位姿,通过实验验证了隔振性能.Yang等[8 ] 通过伪刚体模型和虚功原理建立考虑连杆柔性的Stewart六轴隔振系统动力学模型,控制力由位姿反馈产生,能够实现6自由度多维振动的有效削弱.Zhao等[9 ] 提出一种3自由度多维隔振系统,采用滑模控制策略实时控制磁流变(MR)阻尼器的阻尼力输出,隔振系统能够实现水平、纵向和垂向多维振动的有效隔离.牛军川等[10 ] 建立基于变胞并联机构的多维隔振系统动力学方程,通过改变虎克副轴线的配置方式,实现了3自由度或4自由度多维振动的衰减.Li等[11 ] 提出一种5自由度并联隔振平台,建立隔振系统模糊最优半主动控制模型,通过实验验证了系统的隔振性能.张兵等[12 ] 提出液压冗余式主被动复合控制6自由度多维减振平台,采用模糊比例-积分-微分 (PID) 控制方法实现了多维振动抑制.Li等[13 ] 以隔振系统最小条件数为运动学优化目标,采用双四元数方法推导机构的齐次Jacobian矩阵并进行多目标优化,改善了多维隔振系统运动学指标.程明等[14 ] 以振动控制系统固有频率、静变形量为优化目标,通过多目标优化,提高了并联隔振系统的动力学性能. ...
一种新型2-RPC/2-SPC并联机器人的机构分析与研究
1
2014
... 多维隔振系统的主体结构为2-RPC/2-SPC并联机构[15 ] ,由动平台、定平台和4条支链构成,如图1 所示.图中: Li (i=1, 2, 3, 4)为4条支链;R为转动副; P为移动副; S为球面副; C 为圆柱副. ...
Analysis and research on a new type of 2-RPC/2-SPC parallel robot mechanism
1
2014
... 多维隔振系统的主体结构为2-RPC/2-SPC并联机构[15 ] ,由动平台、定平台和4条支链构成,如图1 所示.图中: Li (i=1, 2, 3, 4)为4条支链;R为转动副; P为移动副; S为球面副; C 为圆柱副. ...
Structural synthesis of a class of kinematically redundant parallel manipulators based on modified G-K criterion and RDOF criterion
1
2018
... 动平台和定平台均为矩形,长度分别为 2a×2b和2c×2d. 在动平台和定平台的形心处分别建立动坐标系p -xyz 和静坐标系O -XYZ .从定平台到动平台,4条支链对称布置:支链 L1 和L3 分别由R、P和C组成;支链L2 和L4 分别由S、P和C 组成.选取移动副为主动关节,在移动副布置4组弹簧和磁流变阻尼器,即可构造多维半主动隔振系统.根据修正的G-K公式[16 ] ,计算得到隔振系统自由度为4,分别为沿 x、 y、 z轴的平移运动和绕y 轴的旋转运动. ...
H ∞ control performance of a full-vehicle suspension featuring magneto-rheological dampers
1
2002
... 磁流变阻尼器为多维隔振系统的作动器,提供的阻尼力[17 ] 为 ...
磁流变阻尼器多物理场耦合仿真及动力性能分析
1
2020
... 式中: x · c e 为黏滞阻尼系数;F e 为阻尼力;F MR 为可控阻尼力;τ y 为剪切屈服强度,可表示为多项式函数的形式[18 ] , ...
Multi-physics coupling simulation and dynamic performance analysis of magnetorheological damper
1
2020
... 式中: x · c e 为黏滞阻尼系数;F e 为阻尼力;F MR 为可控阻尼力;τ y 为剪切屈服强度,可表示为多项式函数的形式[18 ] , ...
Infuluence characteristics of electrical parameters and vibration isolation properties of the stretcher system based on parallel mechanism and self-powered magneto-rheological damper
3
2020
... 式中:B为磁感应强度.式(4)和式(5)中的其他参数和数值[19 ] 如表1 所示. ...
... 磁流变阻尼器主要参数及取值[19 ] ...
... Parameters and values of MR damper[19 ] ...
A robust hybrid generator for harvesting vehicle suspension vibration energy from random road excitation
1
2022
... 多维隔振系统应用于车载精密仪器减振,由于路面不平度引起的随机激励可表示为白噪声的形式[20 ] : ...
Active vibration control of motorized spindle based on mixed H ∞ /Kalman filter robust state feedback control
1
2019
... 为确定鲁棒最优控制增益,需保证多维隔振系统为鲁棒最优控制系统[21 ] ,结合式(8)和式(11)可得, ...
Constrained active suspension control with parameter uncertainty for non-stationary running based on LMI optimization
1
2018
... 式(13)中存在难于求解的F ,根据文献[22 ],定义具有适当维数的矩阵S , 可得如下关系: ...
A local rational model approach for H ∞ estimation: With application to an active vibration isolation system
1
2017
... 式中:ε 为任意较小的正数.对式(15)应用Schur补引理[23 ] 可得: ...
Semi-active control on long-span reticulated steel structures using MR dampers under multi-dimensional earthquake excitaions
1
2012
... 多维隔振系统的实际阻尼力可通过计算理想阻尼力并结合限界Hrovat 算法[24 ] 约束得到.限界Hrovat 算法可表示为 ...
Semi-active control of ambulance stretcher system based on parallel mechanism with MR damper and perturbation analysis
3
2019
... 式中: ωm 、ωk 和ωc 分别表示质量、刚度和阻尼系数的不确定因子.在以下分析中,取ωm =ωk =ωc =10%. 仿真分析所需主要参数和数值[25 ] 如表2 所示. ...
... 多维隔振系统主要参数及取值[25 ] ...
... Parameters and values of multi-dimensional vibration isolator[25 ] ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}