Journal of Shanghai Jiao Tong University ›› 2024, Vol. 58 ›› Issue (11): 1816-1825.doi: 10.16183/j.cnki.jsjtu.2024.206
Special Issue: 制导、导航与控制
• Guidance, Navigation and Control • Previous Articles Next Articles
ZHANG Tao1, ZHANG Xuerui1, CHEN Yong2, ZHONG Kelin2, LUO Qijun1( )
)
Received:2024-06-06
Revised:2024-06-27
Accepted:2024-07-21
Online:2024-11-28
Published:2024-12-02
CLC Number:
ZHANG Tao, ZHANG Xuerui, CHEN Yong, ZHONG Kelin, LUO Qijun. Airfield Multi-Scale Object Detection for Visual Navigation in Civil Aircraft[J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1816-1825.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2024.206
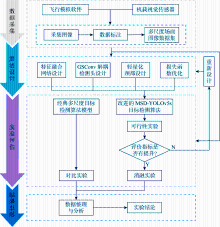
Fig.1
Research approach and experimental procedure
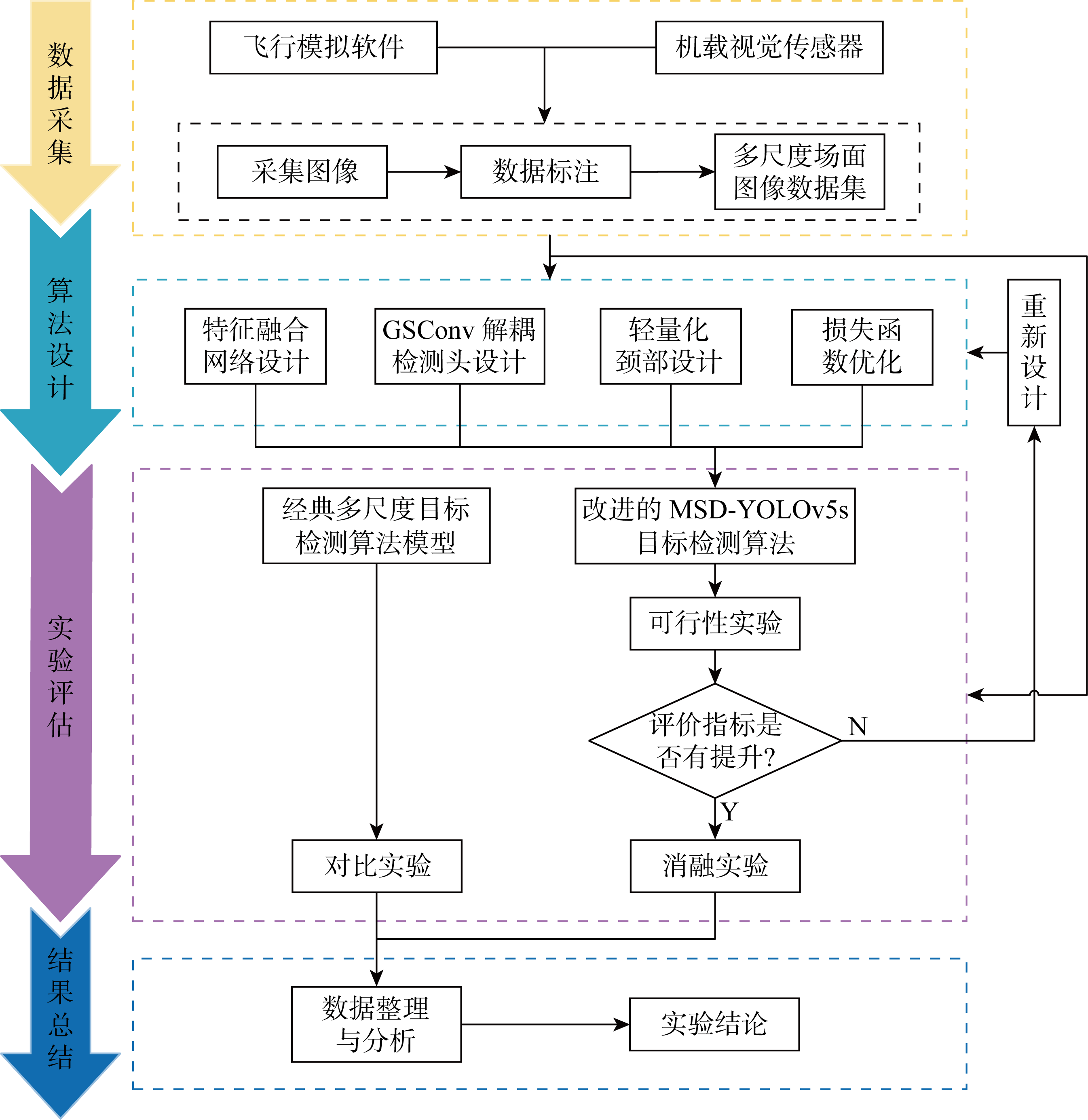
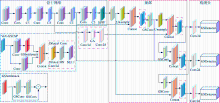
Fig.2
Structure of MSD-YOLOv5s network proposed
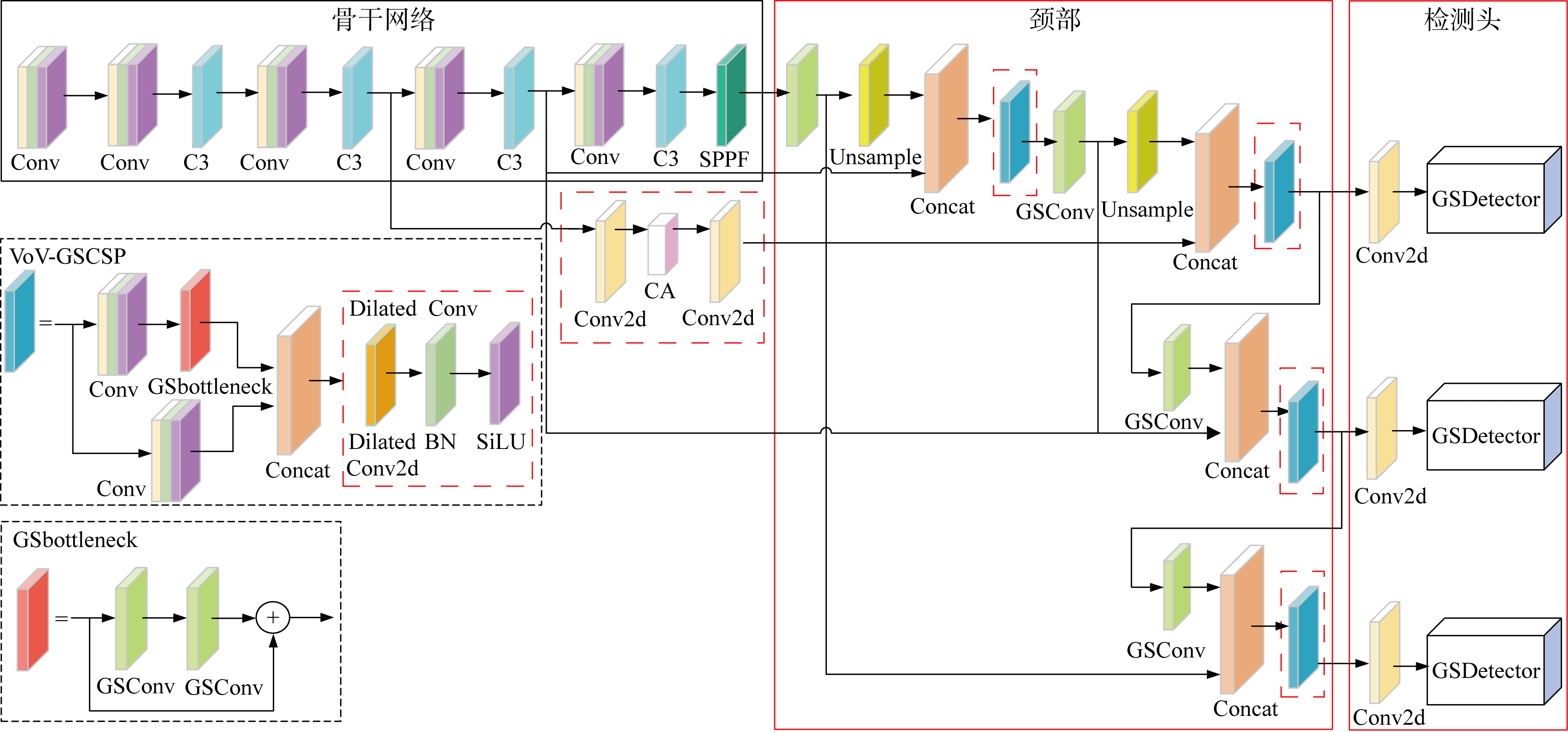
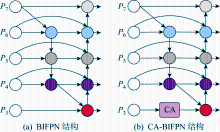
Fig.3
Architecture of feature fusion network
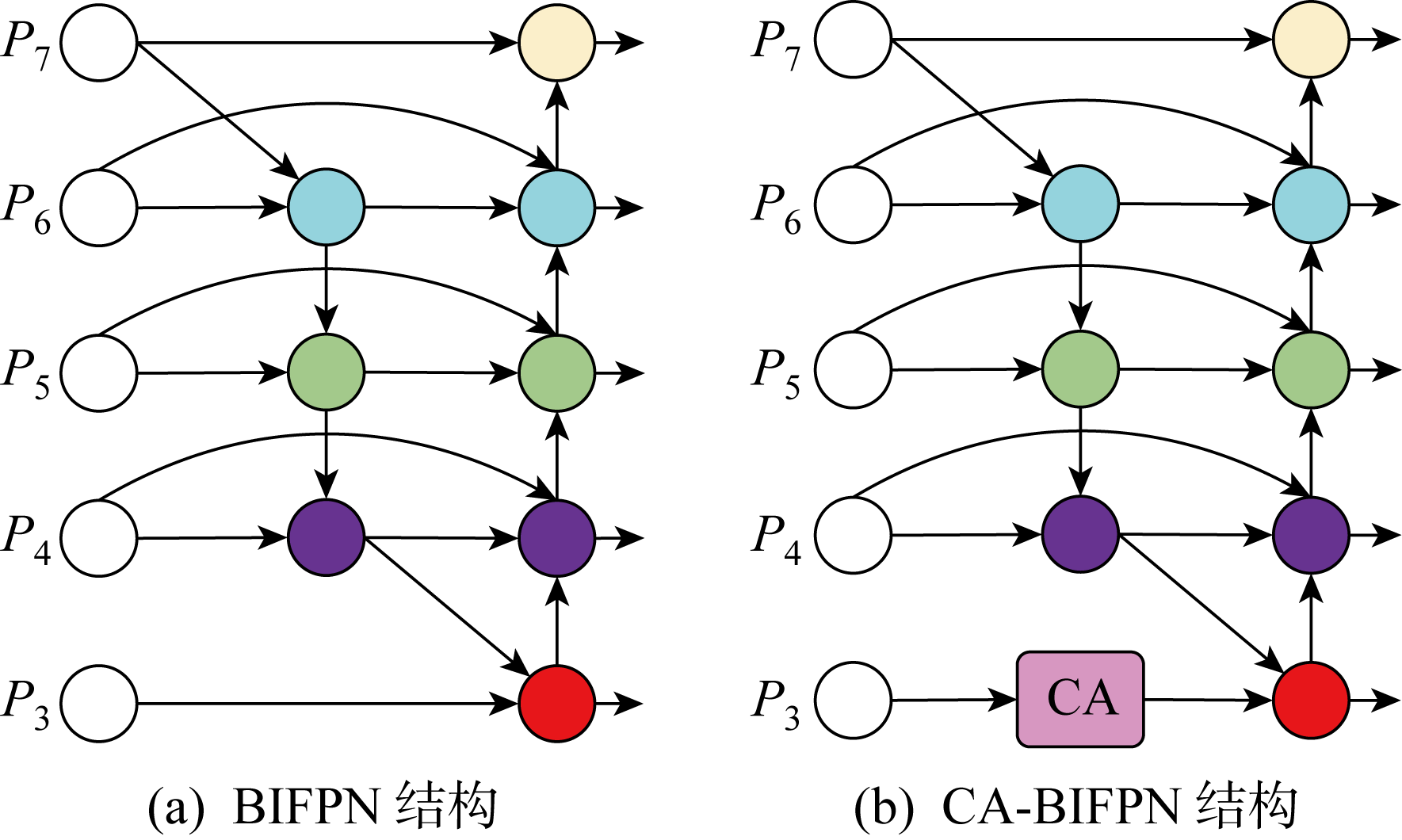
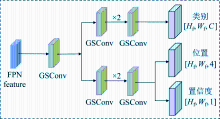
Fig.4
GSConv decoupled detector head
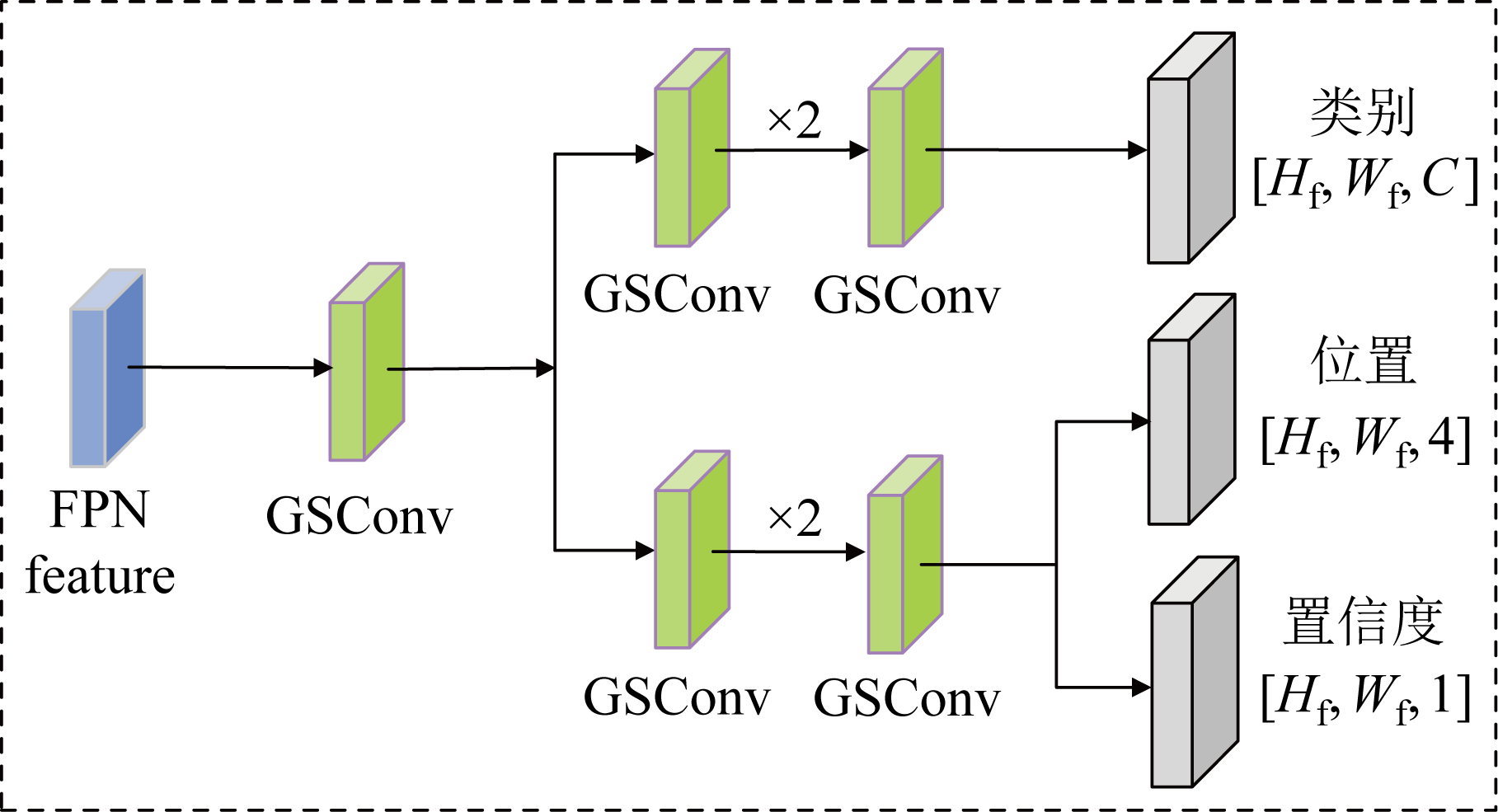
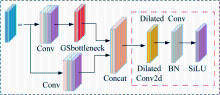
Fig.5
Dilated Convolution module of VoV-GSCSP
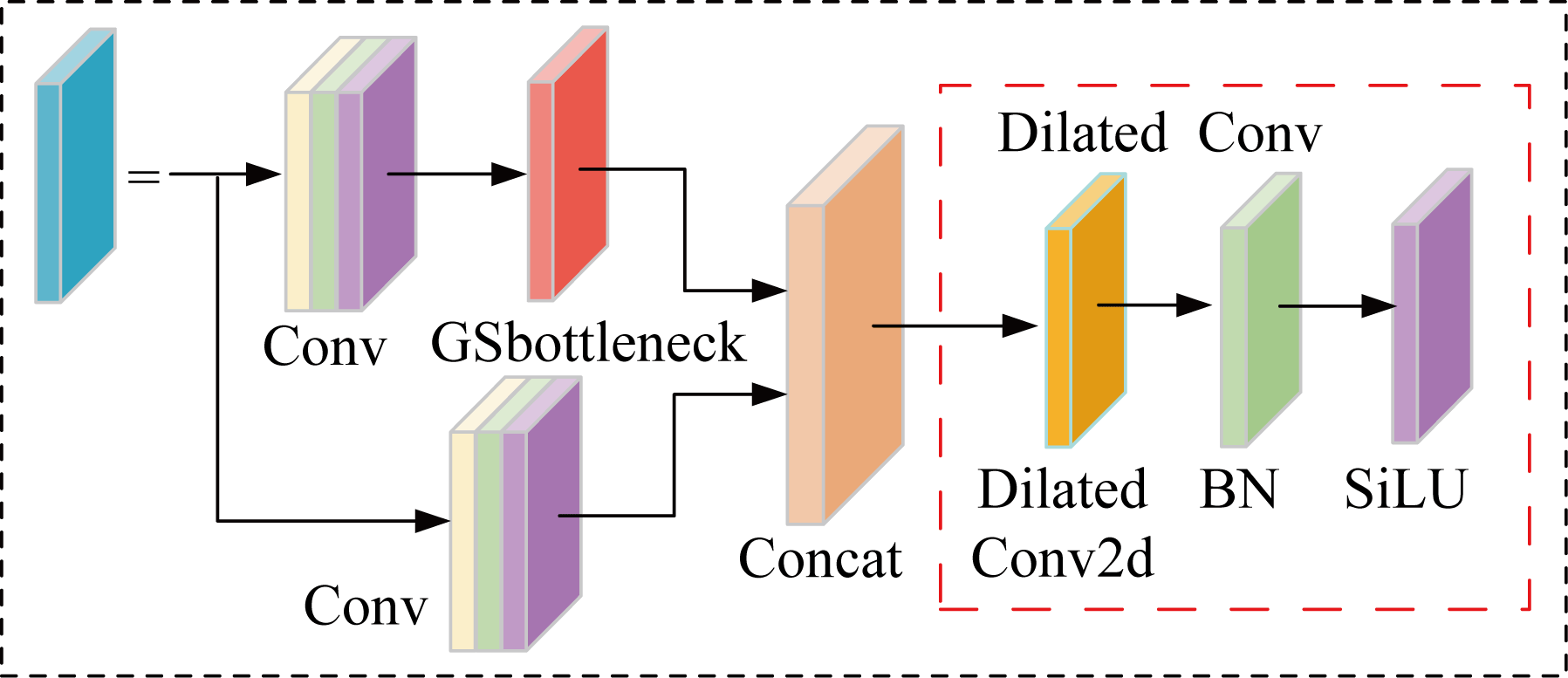
Fig.6
Typical image and annotation examples from airfield object dataset
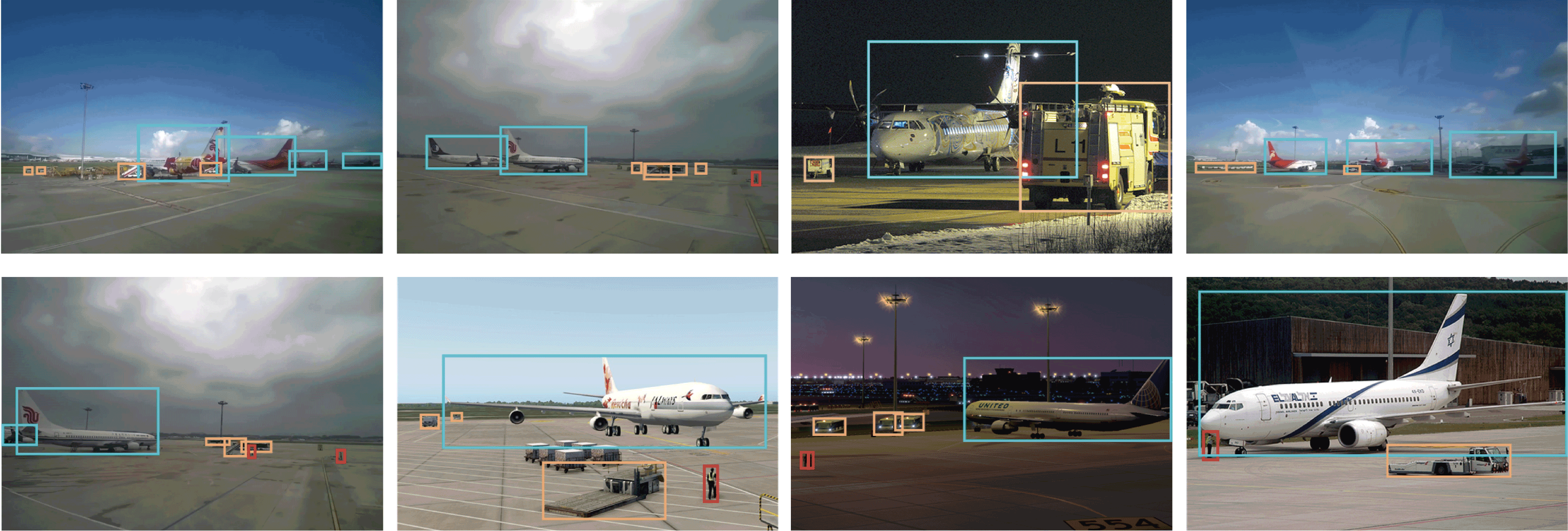
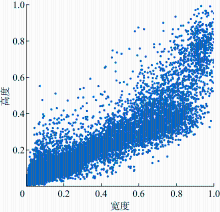
Fig.7
Normalized statistic of self-built datasets object size
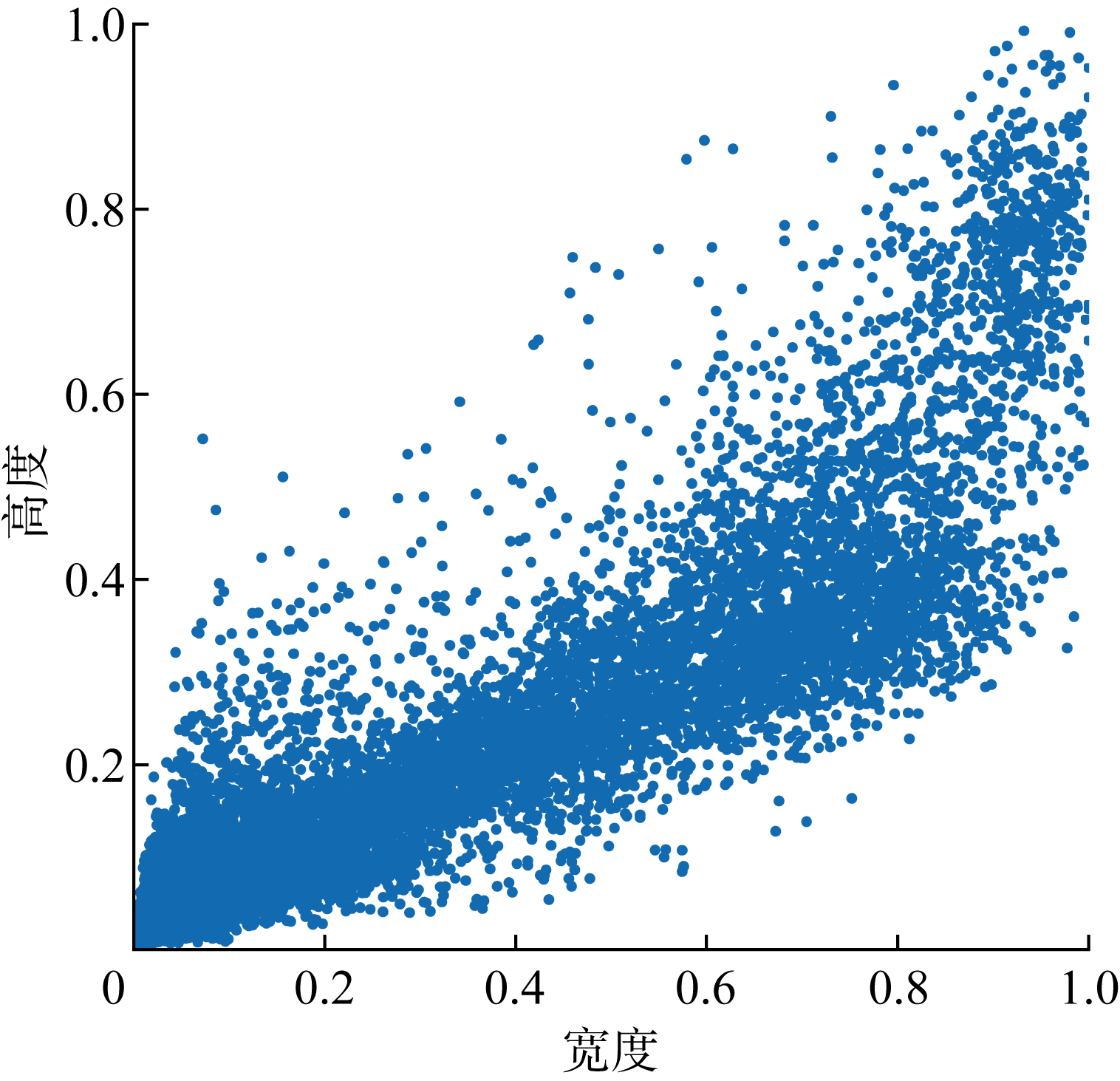
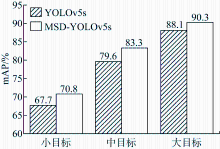
Fig.8
Comparison of objects detection at different scales between YOLOv5s and MSD-YOLOv5s
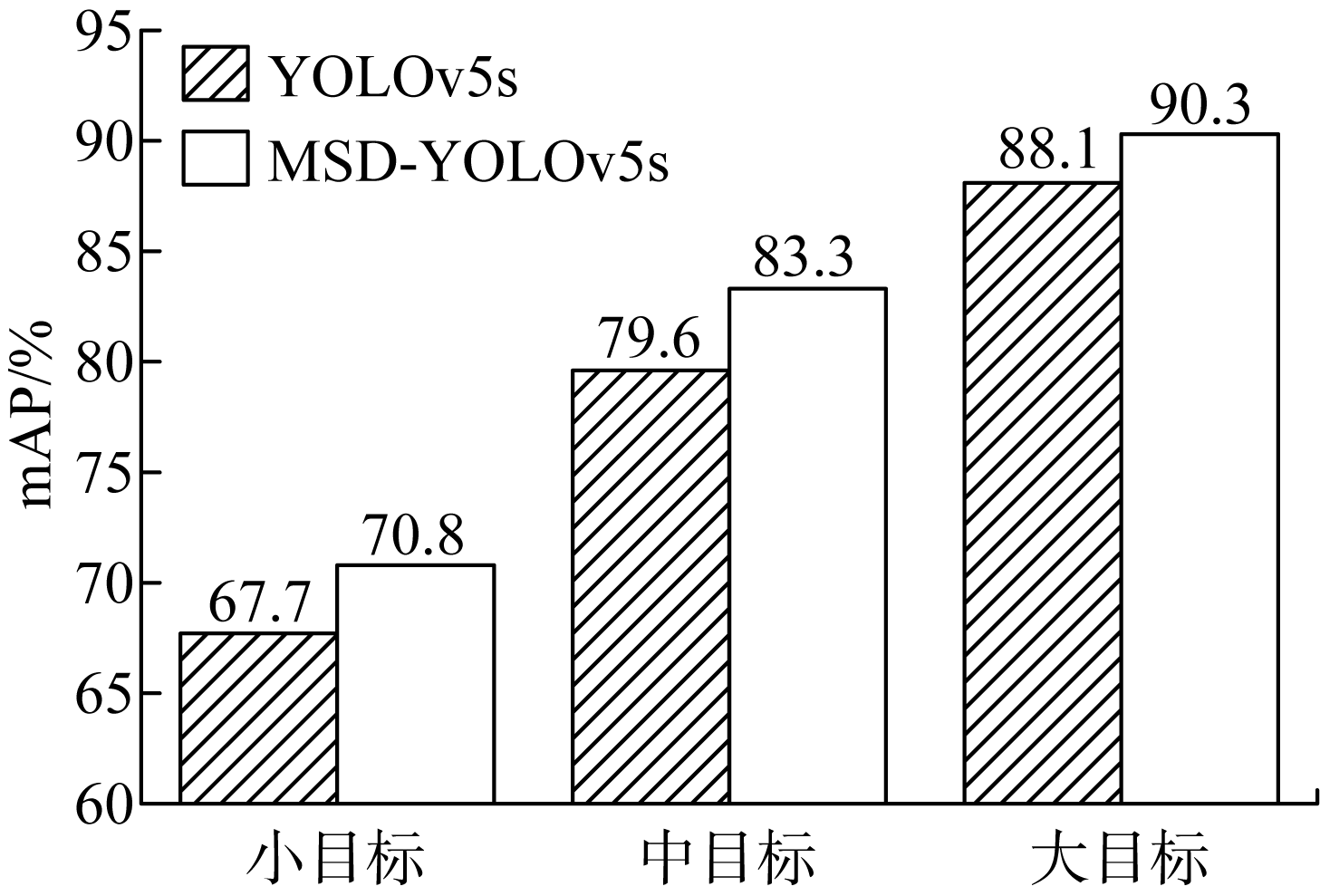
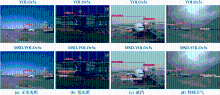
Fig.9
Comparison of multi-scale object inference between YOLOv5s and MSD-YOLOv5s

Tab.1
Comparison of lightweight decoupled heads
| 名称 | mAP/% | 参数量/MB | 计算量/GB | FPS/(帧·s-1) |
|---|---|---|---|---|
| YOLOv5s | 67.21 | 7.1 | 15.8 | 84 |
| YOLOv5s-D | 69.10 | 14.3 | 56.2 | 31 |
| YOLOv5s-GSD | 69.00 | 11.2 | 45.3 | 47 |
Tab.2
Comparison of lightweight necks
| 名称 | mAP/% | 参数 量/MB | 计算 量/GB | FPS/ (帧·s-1) |
|---|---|---|---|---|
| YOLOv5s-GSD | 69.0 | 11.2 | 45.3 | 47 |
| YOLOv5s-GSD-SN | 68.2 | 9.7 | 33.7 | 71 |
| YOLOv5s-GSD-DCSN | 68.8 | 9.7 | 33.7 | 71 |
Tab.3
Comparison of ablation experiments
| 方法 | mAP/% | 参数量/MB | 计算量/GB | FPS/ (帧·s-1) |
|---|---|---|---|---|
| YOLOv5s | 67.21 | 7.1 | 15.8 | 84 |
| +CA-BIFPN | 68.49 | 7.2 | 16.2 | 75 |
| +GSDetector | 70.95 | 12.3 | 43.7 | 47 |
| +DC Slim-Neck | 70.93 | 9.8 | 30.1 | 71 |
| +EIoU | 71.40 | 9.8 | 30.2 | 71 |
Tab.4
Comparison of typical algorithms
| 算法名称 | mAP/% | 参数量/ MB | 计算量/ GB | FPS/ (帧·s-1) |
|---|---|---|---|---|
| RetinaNet[ | 63.28 | 8.7 | 28.0 | 12 |
| Faster R-CNN[ | 68.95 | 28.3 | 947.3 | 15 |
| SSD[ | 64.82 | 23.6 | 235.2 | 49 |
| YOLOv5s[ | 67.21 | 7.1 | 15.8 | 84 |
| YOLOv6[ | 64.53 | 18.5 | 45.2 | 45 |
| YOLOv7[ | 66.14 | 37.2 | 105.7 | 40 |
| YOLOv8[ | 66.96 | 15.7 | 39.3 | 49 |
| YOLOX[ | 67.05 | 11.5 | 38.9 | 42 |
| 本文算法 | 71.40 | 9.8 | 30.2 | 71 |
| [1] | Airbus Pioneering Sustainable Aerospace. Airbus demonstrates the first fully automatic vision-based take-off[EB/OL]. (2020-01-16)[2024-05-20]. https://www.airbus.com/en/newsroom/press-releases/2020-01-airbus-demonstrates-first-fully-automatic-vision-based-take-off.. |
| [2] | 陈科圻, 朱志亮, 邓小明, 等. 多尺度目标检测的深度学习研究综述[J]. 软件学报, 2021, 32(4): 1201-1227. |
| CHEN Keqi, ZHU Zhiliang, DENG Xiaoming, et al. Deep learning for multi-scale object detection: A survey[J]. Journal of Software, 2021, 32(4): 1201-1227. | |
| [3] |
REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149.
doi: 10.1109/TPAMI.2016.2577031 pmid: 27295650 |
| [4] | LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot MultiBox detector[C]//European Conference on Computer Vision. Cham, Germany: Springer, 2016: 21-37. |
| [5] | LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, USA: IEEE, 2017: 936-944. |
| [6] | TAN M X, PANG R M, LE Q V. EfficientDet: Scalable and efficient object detection[C]//2020 IEEE Conference on Computer Vision and Pattern Recognition. Seattle, USA: IEEE, 2020: 10778-10787. |
| [7] | REDMON J, FARHADI A. YOLOv3: An incremental improvement[DB/OL]. (2018-04-08) [2024-05-20]. http://arxiv.org/abs/1804.02767. |
| [8] | LIN T Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2020, 42(2): 318-327. |
| [9] | 韩松臣, 张比浩, 李炜, 等. 基于改进Faster-RCNN的机场场面小目标物体检测算法[J]. 南京航空航天大学学报, 2019, 51(6): 735-741. |
| HAN Songchen, ZHANG Bihao, LI Wei, et al. Small target detection in airport scene via modified faster-RCNN[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2019, 51(6): 735-741. | |
| [10] |
黄国新, 李炜, 张比浩, 等. 改进SSD的机场场面多尺度目标检测算法[J]. 计算机工程与应用, 2022, 58(5): 264-270.
doi: 10.3778/j.issn.1002-8331.2010-0110 |
|
HUANG Guoxin, LI Wei, ZHANG Bihao, et al. Improved SSD-based multi-scale object detection algorithm in airport surface[J]. Computer Engineering and Applications, 2022, 58(5): 264-270.
doi: 10.3778/j.issn.1002-8331.2010-0110 |
|
| [11] | HE K M, ZHANG X Y, REN S Q, et al. Deep residual learning for image recognition[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, USA: IEEE, 2016: 770-778. |
| [12] | LI H L, LI J, WEI H B, et al. Slim-neck by GSConv: A lightweight-design for real-time detector architectures[J]. Journal of Real-Time Image Processing, 2024, 21(3): 62. |
| [13] | CHOLLET F. Xception: Deep learning with depthwise separable convolutions[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, USA: IEEE, 2017: 1800-1807. |
| [14] | TIAN Y L, ZHANG Q S, REN Z L, et al. Multi-scale dilated convolution network based depth estimation in intelligent transportation systems[J]. IEEE Access, 2019, 7: 185179-185188. |
| [15] | ZHANG X Y, ZHOU X Y, LIN M X, et al. ShuffleNet: An extremely efficient convolutional neural network for mobile devices[C]//2018 IEEE Conference on Computer Vision and Pattern Recognition. Salt Lake City, USA: IEEE, 2018: 6848-6856. |
| [16] | CHIU Y C, TSAI C Y, RUAN M D, et al. Mobilenet-SSDv2: An improved object detection model for embedded systems[C]//2020 International Conference on System Science and Engineering. Kagawa, Japan: IEEE, 2020: 1-5. |
| [17] | BOCHKOVSKIY A, WANG C Y, LIAO H Y. YOLOv4: Optimal speed and accuracy of object detection[DB/OL]. (2020-04-23) [2024-06-15]. https://arxiv.org/abs/2004.10934v1. |
| [18] | Ultralytics. YOLOv5[EB/OL]. (2020-06-03) [2024-06-15]. https://github.com/ultralytics/yolov5. |
| [19] | YAN K, HUA M, LI Y L. Multi-target detection in airport scene based on Yolov5[C]//2021 IEEE 3rd International Conference on Civil Aviation Safety and Information Technology. Changsha, China: IEEE, 2021: 1175-1177. |
| [20] | LIU S, QI L, QIN H F, et al. Path aggregation network for instance segmentation[C]//2018 IEEE Conference on Computer Vision and Pattern Recognition. Salt Lake City, USA: IEEE, 2018: 8759-8768. |
| [21] | LIN T Y, MAIRE M, BELONGIE S, et al. Microsoft COCO: Common objects in context[C]//European Conference on Computer Vision. Cham, Germany: Springer, 2014: 740-755. |
| [22] | GUPTA C, GILL N S, GULIA P, et al. A novel finetuned YOLOv6 transfer learning model for real-time object detection[J]. Journal of Real-Time Image Processing, 2023, 20(3): 42. |
| [23] | WANG C Y, BOCHKOVSKIY A, LIAO H Y M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors[C]//2023 IEEE Conference on Computer Vision and Pattern Recognition. Vancouver, Canada: IEEE, 2023: 7464-7475. |
| [24] | SAFALDIN M, ZAGHDEN N, MEJDOUB M. An improved YOLOv8 to detect moving objects[J]. IEEE Access, 2024, 12: 59782-59806. |
| [25] | DAI Z Y. Uncertainty-aware accurate insulator fault detection based on an improved YOLOX model[J]. Energy Reports, 2022, 8: 12809-12821. |
| [1] | WANG Wei, RUAN Yaduan, GU Peng, CHEN Qimei. Calculation of Maximum Crack Width Based on DAUNet Integrating Attention Mechanism [J]. Journal of Shanghai Jiao Tong University, 2025, 59(12): 1866-1877. |
| [2] | MAO Yanmei, LI Huafeng, ZHANG Yafei. Unsupervised Domain Adaptation for Cross-Regional Scenes Person Re-Identification [J]. Journal of Shanghai Jiao Tong University, 2025, 59(12): 1878-1890. |
| [3] | ZHAN Zehui, ZHONG Ming’en, YUAN Bingan, TAN Jiawei, FAN Kang. Detection of Roadside Vehicle Parking Violations Under Random Horizontal Camera Condition [J]. Journal of Shanghai Jiao Tong University, 2025, 59(10): 1568-1580. |
| [4] | WANG Hongxin, XU Degang, ZHOU Kaiwen, LI Linwen, WEN Xin. Data-Driven Method of Modeling Sparse Flow Field Data [J]. Journal of Shanghai Jiao Tong University, 2025, 59(5): 684-690. |
| [5] | BAO Jiahan, SUN Deshang, HUANG Jianzhong, HU Zheng. FAST Algorithm for Accurate Corner Points Detection of Section Steel Based on Adaptive Threshold [J]. Journal of Shanghai Jiao Tong University, 2025, 59(5): 691-702. |
| [6] | LIU Jianxin, PAN Ruru, ZHOU Jian. Unsupervised Fabric Defect Detection Based on Under-Complete Dictionary Reconstruction [J]. Journal of Shanghai Jiao Tong University, 2025, 59(2): 283-292. |
| [7] | WANG Ke, LIU Yiyang, YANG Jie, LU Aiguo, LI Zhe, XU Mingliang. Landing State Recognition of Carrier-Based Aircraft Based on Adaptive Feature Enhancement and Fusion [J]. Journal of Shanghai Jiao Tong University, 2025, 59(2): 274-282. |
| [8] | WANG Baokun, WANG Rulu, CHEN Jinjian, PAN Yue, WANG Lujie. Automatic Detection Method for Surface Diseases of Shield Tunnel Based on Deep Learning [J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1716-1723. |
| [9] | NIU Guochen, SUN Xiangyu, YUAN Zhengyan. Vehicle-Road Collaborative Perception Method Based on Dual-Stream Feature Extraction [J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1826-1834. |
| [10] | QIN Jing, WEN Yuanbo, GAO Tao, LIU Yao. A Transformer-Based Diffusion Model for All-in-One Weather-Degraded Image Restoration [J]. Journal of Shanghai Jiao Tong University, 2024, 58(10): 1606-1617. |
| [11] | LI Chunxi, QIAO Hanzhe, YAO Gang, JIANG Haoyu, CUI Xiangke, GE Quanbo. SOH Estimation Method Based on RBF-BLS for Low-Carbon and Safe Travel of Electric Vehicle [J]. Journal of Shanghai Jiao Tong University, 2024, 58(9): 1454-1464. |
| [12] | HUANG He, HU Kaiyi, YANG Lan, WANG Hao, GAO Tao, WANG Huifeng. FPGA Design of Image Defogging System in Intelligent Tachograph [J]. Journal of Shanghai Jiao Tong University, 2024, 58(4): 565-578. |
| [13] | HUANG He, HU Kaiyi, LI Zhanyi, WANG Huifeng, RU Feng, WANG Jun. An Image Dehazing Method for UAV Aerial Photography of Buildings Combining MCAP and GRTV Regularization [J]. Journal of Shanghai Jiao Tong University, 2023, 57(3): 366-378. |
| [14] | CHENG Bin, HUANG Bin, LI Derui. An Image Self-Calibration Method Based on Parallel Laser Ranging [J]. Journal of Shanghai Jiao Tong University, 2022, 56(7): 850-857. |
| [15] | LI Yu, YANG Daoyong, LIU Lingya, WANG Yiyin. Underwater Image Enhancement Based on Generative Adversarial Networks [J]. Journal of Shanghai Jiao Tong University, 2022, 56(2): 134-142. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||