Journal of Shanghai Jiao Tong University ›› 2024, Vol. 58 ›› Issue (11): 1826-1834.doi: 10.16183/j.cnki.jsjtu.2024.239
• Guidance, Navigation and Control • Previous Articles
NIU Guochen( ), SUN Xiangyu, YUAN Zhengyan
), SUN Xiangyu, YUAN Zhengyan
Received:2024-06-21
Revised:2024-07-16
Accepted:2024-07-18
Online:2024-11-28
Published:2024-12-02
CLC Number:
NIU Guochen, SUN Xiangyu, YUAN Zhengyan. Vehicle-Road Collaborative Perception Method Based on Dual-Stream Feature Extraction[J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1826-1834.

Fig.1
Example of collaborative perception scene

Fig.2
Overall structure of vehicle road collaborative detection framework
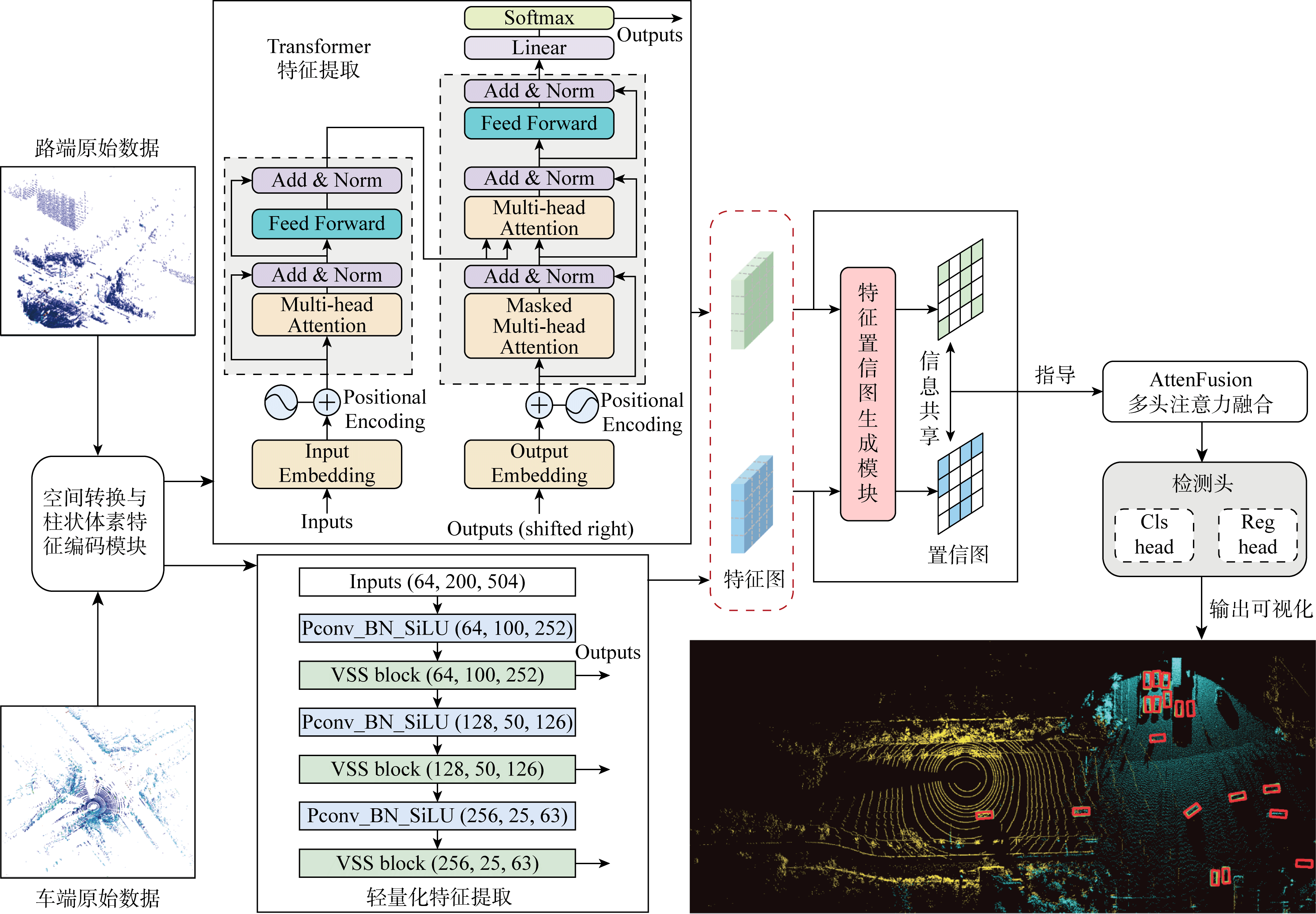

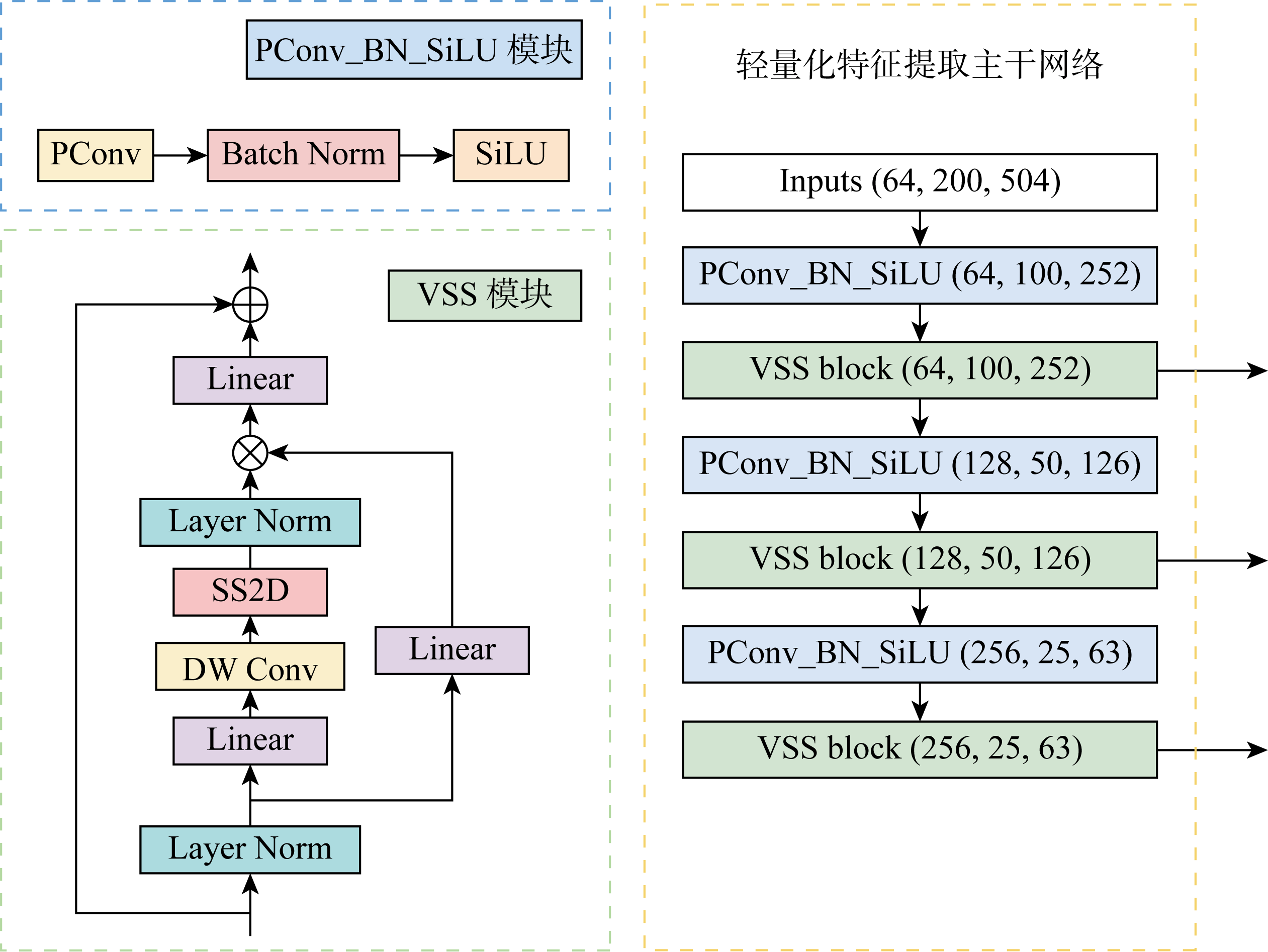
Fig.3
Design of lightweight feature extraction backbone network for vehicle-side
Tab.1
Comparison results between method proposed and other feature extraction networks
| 网络 | 方法 | AP30/% | AP50/% | AP70/% | 模型大小/MB | GFLOPs | ||
|---|---|---|---|---|---|---|---|---|
| 轻量化单主干网络 | MobileNetV2 | 59.54 | 53.19 | 34.25 | 3.5 | 0.3 | ||
| FasterNet | 63.10 | 57.25 | 38.75 | 7.6 | 0.85 | |||
| YOLO-backbone | 62.19 | 55.70 | 36.11 | 5.1 | 2.1 | |||
| EfficientFormerv2 | 60.76 | 55.85 | 38.60 | 6.1 | 2.7 | |||
| 大规模单主干网络 | ResNet | 66.80 | 62.14 | 46.50 | 61.0 | 10.1 | ||
| ConvNextv2 | 66.57 | 61.61 | 46.60 | 89.0 | 15.4 | |||
| Swin-Transformer | 71.17 | 66.36 | 52.44 | 88.0 | 15.4 | |||
| 车路双流主干网络 | 本文方法 | 72.35 | 67.67 | 53.74 | 车端,8.1 | 路端,88 | 车端,1.1 | 路端,15.8 |
Tab.2
Results of ablation experiment
| Baseline | PConv | Mamba- VSS | AP30/ % | AP50/ % | AP70/ % | 模型 大小/MB |
|---|---|---|---|---|---|---|
| √ | 67.54 | 61.27 | 51.82 | 13.5 | ||
| √ | √ | 71.11 | 64.48 | 51.05 | 9.7 | |
| √ | √ | √ | 72.35 | 67.67 | 53.74 | 8.1 |
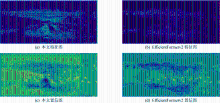
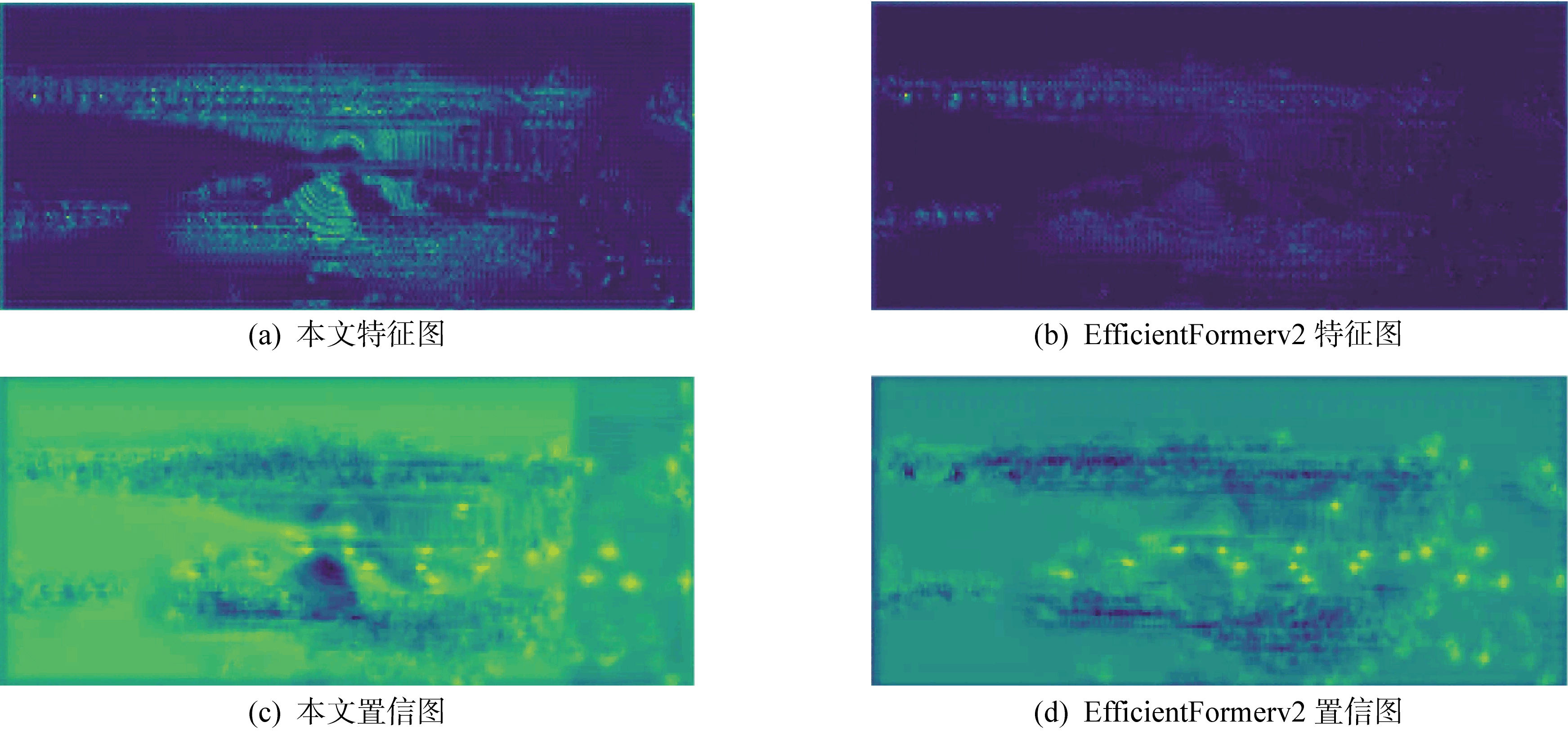
Fig.4
Visual comparison between feature and confidence graphs from vehicle
Tab.3
Comparison results between method proposed and other collaborative perception methods
| 方法 | AP50/% | AP70/% | C |
|---|---|---|---|
| No Collaboration | 50.03 | 43.57 | 0.00 |
| Late Fusion | 53.12 | 37.88 | 11.45 |
| When2com | 51.12 | 36.17 | 22.62 |
| V2VNet | 56.01 | 42.25 | 24.21 |
| V2X-ViT | 54.26 | 43.35 | 22.62 |
| DiscoNet | 54.29 | 44.88 | 22.62 |
| Where2comm | 63.54 | 48.78 | 20.56 |
| 本文方法 | 67.67 | 53.74 | 20.56 |
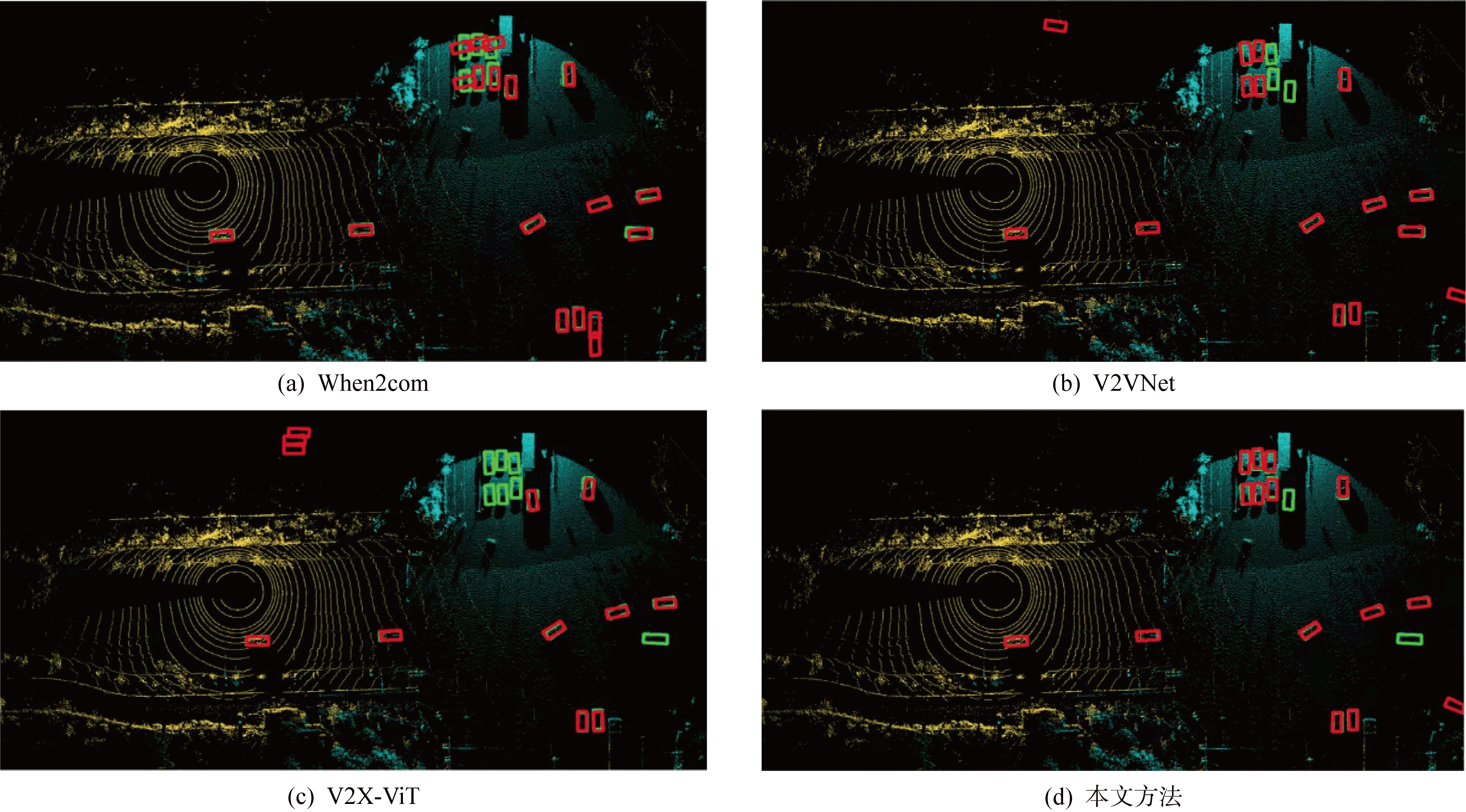
Fig.5
Comparison of perception results of different collaborative frameworks in 3D view
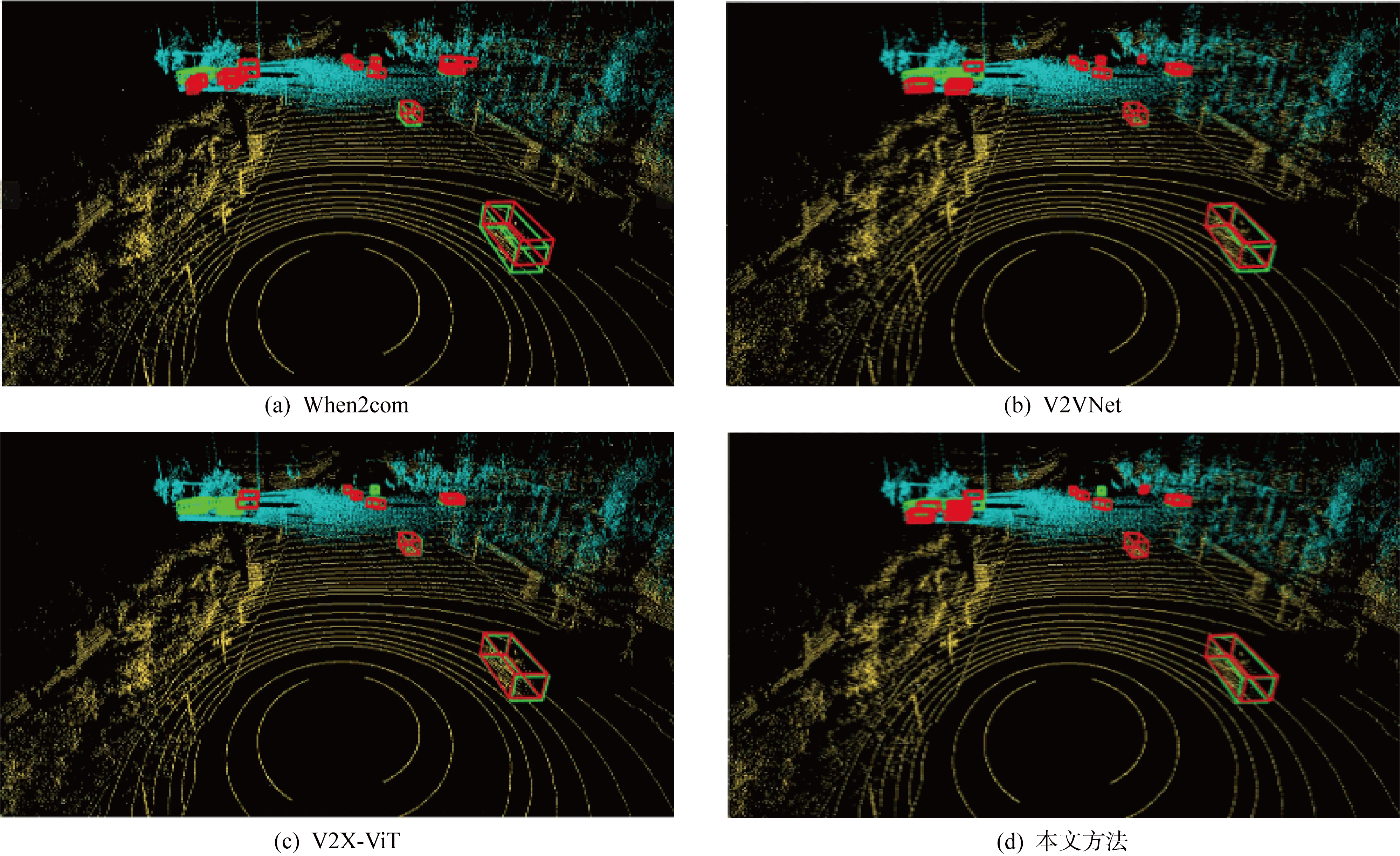
Fig.6
Comparison of perception results of different collaborative frameworks in BEV view
| [1] |
伊笑莹, 芮一康, 冉斌, 等. 车路协同感知技术研究进展及展望[J]. 中国工程科学, 2024, 26(1): 178-189.
doi: 10.15302/J-SSCAE-2024.01.016 |
|
YI Xiaoying, RUI Yikang, RAN Bin, et al. Vehicle-infrastructure cooperative sensing: Progress and prospect[J]. Strategic Study of CAE, 2024, 26(1): 178-189.
doi: 10.15302/J-SSCAE-2024.01.016 |
|
| [2] | ARNOLD E, DIANATI M, DE TEMPLE R, et al. Cooperative perception for 3D object detection in driving scenarios using infrastructure sensors[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(3): 1852-1864. |
| [3] | 张毅, 姚丹亚, 李力, 等. 智能车路协同系统关键技术与应用[J]. 交通运输系统工程与信息, 2021, 21(5): 40-51. |
| ZHANG Yi, YAO Danya, LI Li, et al. Technologies and applications for intelligent vehicle-infrastructure cooperation systems[J]. Journal of Transportation Systems Engineering and Information Technology, 2021, 21(5): 40-51. | |
| [4] | DOSOVITSKIY A, ROS G, CODERVILLA F, et al. CARLA: An open urban driving simulator[C]//1st Conference on Robot Learning. Mountain View, USA: CoRL, 2017: 5550767. |
| [5] | CHEN Q, TANG S H, YANG Q, et al. Cooper: Cooperative perception for connected autonomous vehicles based on 3D point clouds[C]//2019 IEEE 39th International Conference on Distributed Computing Systems. Dallas, TX, USA: IEEE, 2019: 514-524. |
| [6] | CHEN Q. F-cooper: Feature based cooperative perception for autonomous vehicle edge computing system using 3D point clouds[DB/OL]. (2019-09-13)[2024-06-10]. https://arxiv.org/abs/1909.06459. |
| [7] | GUO J D, CARRILLO D, TANG S H, et al. CoFF: Cooperative spatial feature fusion for 3-D object detection on autonomous vehicles[J]. IEEE Internet of Things Journal, 2021, 8(14): 11078-11087. |
| [8] | HU Y, FANG S, LEI Z, et al.Where2comm: Communication-efficient collaborative perception via spatial confidence maps[C]//36th Corference on Neural Information Processing Systems. New Orleans, USA: NIPS, 2022: 4874-4886. |
| [9] | LIU Y C, TIAN J J, GLASER N, et al. When2com: Multi-agent perception via communication graph grouping[C]//2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Seattle, WA, USA: IEEE, 2020: 4105-4114. |
| [10] | WANG J Y, ZENG Y, GONG Y. Collaborative 3D object detection for automatic vehicle systems via learnable communications[DB/OL]. (2022-05-24) [2024-06-10]. https://arxiv.org/abs/2205.11849v1. |
| [11] | 王秉路, 靳杨, 张磊, 等. 基于多传感器融合的协同感知方法[J]. 雷达学报, 2024, 13(1): 87-96. |
| WANG Binglu, JIN Yang, ZHANG Lei, et al. Collaborative perception method based on multisensor fusion[J]. Journal of Radars, 2024, 13(1): 87-96. | |
| [12] | LANG A H, VORA S, CAESAR H, et al. PointPillars: Fast encoders for object detection from point clouds[C]//2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Long Beach, CA, USA: IEEE, 2019: 12689-12697. |
| [13] | DOSOVITSKIY A, BEYER L, KOLESNIKOV A, et al. An image is worth 16×16 words: Transformers for image recognition at scale[DB/OL]. (2020-10-22)[2024-06-10]. https://arxiv.org/abs/2010.11929. |
| [14] | LIU Z, LIN Y T, CAO Y, et al. Swin transformer: Hierarchical vision transformer using shifted windows[C]//2021 IEEE/CVF International Conference on Computer Vision. Montreal, QC, Canada: IEEE, 2021: 9992-10002. |
| [15] | CHEN J R, KAO S H, HE H, et al. Run, don’t walk: Chasing higher FLOPS for faster neural networks[C]//2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver, BC, Canada: IEEE, 2023: 12021-12031. |
| [16] | GU A, DAO T. Mamba: Linear-time sequence modeling with selective state spaces[DB/OL]. (2023-12-01)[2024-06-10]. https://arxiv.org/abs/2312.00752v2. |
| [17] | 上海交通大学. 基于空间置信度图的多轮多模态多智能体的协同感知方法: CN 202211076556.X[P]. 2022-12-13[2024-06-10]. |
| [18] | YU H B, LUO Y Z, SHU M, et al. DAIR-V2X: A large-scale dataset for vehicle-infrastructure cooperative 3D object detection[C]//2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. New Orleans, LA, USA: IEEE, 2022: 21329-21338. |
| [19] | WANG T H, MANIVASAGAM S, LIANG M, et al. V2VNet: Vehicle-to-Vehicle communication for joint perception and prediction[M]//Computer Vision-ECCV 2020. Cham: Springer, 2020: 605-621. |
| [20] | XU R S, XIANG H, TU Z Z, et al. V2X-ViT: Vehicle-to-Everything cooperative perception with Vision Transformer[M]//Computer Vision-ECCV 2022. Cham: Springer, 2022: 107-124. |
| [21] | MEHR E, JOURDAN A, THOME N, et al. DiscoNet: Shapes learning on disconnected manifolds for 3D editing[C]//2019 IEEE/CVF International Conference on Computer Vision. Seoul: IEEE, 2019: 3473-3482. |
| [1] | LIU Zengmin (刘增敏), WANG Shentao(王申涛), YAO Lixiu(姚莉秀), CAI Yunze(蔡云泽). Online Multi-Object Tracking Under Moving Unmanned Aerial Vehicle Platform Based on Object Detection and Feature Extraction Network [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(3): 388-399. |
| [2] | ZENG Zhirian(曾志贤),CAO Jianjun*(曹建军),WENG Nianfeng(翁年凤),YUAN Zhen(袁震),YU Xu(余旭). Cross-Modal Entity Resolution for Image and Text Integrating Global and Fine-Grained Joint Attention Mechanism [J]. J Shanghai Jiaotong Univ Sci, 2023, 28(6): 728-737. |
| [3] | ZHAN Yan, CHEN Zhihui, ZHU Baochang, ZHU Tingting, SHAO Yiping, LU Jiansha. A Pallet Recognition Method Based on Adaptive Color Fast Point Feature Histogram [J]. Journal of Shanghai Jiao Tong University, 2023, 57(3): 297-308. |
| [4] | XU Hanqing (徐汉卿), YANG Ming∗ (杨 明), DENG Liuyuan (邓琉元), LI Hao (李 颢), WANG Chunxiang, (王春香), HAN Weibin (韩伟斌), YU Yuelong (于跃龙). Semantic Segmentation-Based Road Marking Detection Using Around View Monitoring System [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(6): 833-843. |
| [5] | HUANG Jiayang (黄嘉阳), YANG Pengfei* (杨鹏飞), WAN Bo (万波), ZHANG Zhiqiang (张志强). KDLPCCA-Based Projection for Feature Extraction in SSVEP-Based Brain-Computer Interfaces [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(2): 168-175. |
| [6] | ZHANG Yanhe, ZANG Yuejin, CHEN Bo, XU Mingsheng. Radar HRRP Target Recognition Algorithm Based on Variational Auto-encoder with Disentangled Representation [J]. Air & Space Defense, 2022, 5(2): 87-93. |
| [7] | ZHANG Chenzhi (张晨之), ZHUANG Cheng (庄 诚), ZHENG Xueke (郑学科), CAI Runze (蔡润泽), LI Mian (李 冕). Stochastic Model Predictive Control Approach to Autonomous Vehicle Lane Keeping [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(5): 626-633. |
| [8] | WANG Wei, WANG Bing, HU Xiong, SUN Dejian. Online Degradation Assessment of Shore Bridge Hoisting Gearbox Based on Improved Symbolic Sequence Entropy and Logistic Regression Model [J]. Journal of Shanghai Jiao Tong University, 2021, 55(10): 1272-1280. |
| [9] | WANG Jun, WANG Sai, REN Yuming, CHEN Dehong, CUI Shan, WEI Shaoming. Combining Denoising with Super Resolution for Target Detection and Recognition of SAR Image Based on Deep Learning [J]. Air & Space Defense, 2020, 3(3): 24-30. |
| [10] | SHANG Nuonuo, LIANG Yan, ZHAI Hengfeng, YUAN Haojuan. An Efficient Method of Full-pulse Feature Extraction for Radar Signals [J]. Air & Space Defense, 2018, 1(4): 37-43. |
| [11] | WANG Rui,LIU Bin,ZHOU Tianrun,YANG Yu. Vehicle Recognition in Acoustic and Seismic Networks via Collaboration Representation [J]. Journal of Shanghai Jiaotong University, 2018, 52(1): 103-110. |
| [12] | WANG Yukui1,2* (王余奎), HUANG Zhijie1 (黄之杰), ZHAO Xucheng1 (赵徐成), ZHU Yi1 (朱 毅), WEI Dongtao1 (魏东涛). A Novel De-noising Method Based on Discrete Cosine Transform and Its Application in the Fault Feature Extraction of Hydraulic Pump [J]. Journal of shanghai Jiaotong University (Science), 2016, 21(3): 297-306. |
| [13] | LI Hong-kun1 (李宏坤), ZHANG Zhi-xin2* (张志新), LI Xiu-gang3 (李秀刚), REN Yuan-jie1 (任远杰). Reliability Prediction Method Based on State Space Model for Rolling Element Bearing [J]. Journal of shanghai Jiaotong University (Science), 2015, 20(3): 317-321. |
| [14] | WEN Cheng-yu* (文成玉), DONG Liang (董良), JIN Xin (金欣). Feature Extraction of Bearing Vibration Signals Using Second Generation Wavelet and Spline-Based Local Mean Decomposition [J]. Journal of shanghai Jiaotong University (Science), 2015, 20(1): 56-60. |
| [15] | WANG Siyang,XU Liming,LAI Xiaoping. Grinding Wheel Overload Criterion and Diagnosis [J]. Journal of Shanghai Jiaotong University, 2015, 49(09): 1346-1352. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||