Journal of Shanghai Jiao Tong University ›› 2022, Vol. 56 ›› Issue (2): 143-155.doi: 10.16183/j.cnki.jsjtu.2021.037
Previous Articles Next Articles
HUANG He1,2( ), WU Kun1,2, LI Xinrui1, WANG Jun2,3, WANG Huifeng1, RU Feng1,2
), WU Kun1,2, LI Xinrui1, WANG Jun2,3, WANG Huifeng1, RU Feng1,2
Received:2021-02-01
Online:2022-02-28
Published:2022-03-03
CLC Number:
HUANG He, WU Kun, LI Xinrui, WANG Jun, WANG Huifeng, RU Feng. A Multi-Feature Particle Filter Vehicle Tracking Algorithm Based on Adaptive Interpolation Moth-Flame Optimization[J]. Journal of Shanghai Jiao Tong University, 2022, 56(2): 143-155.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2021.037
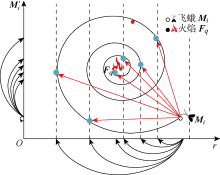
Fig.1
Moth tracks
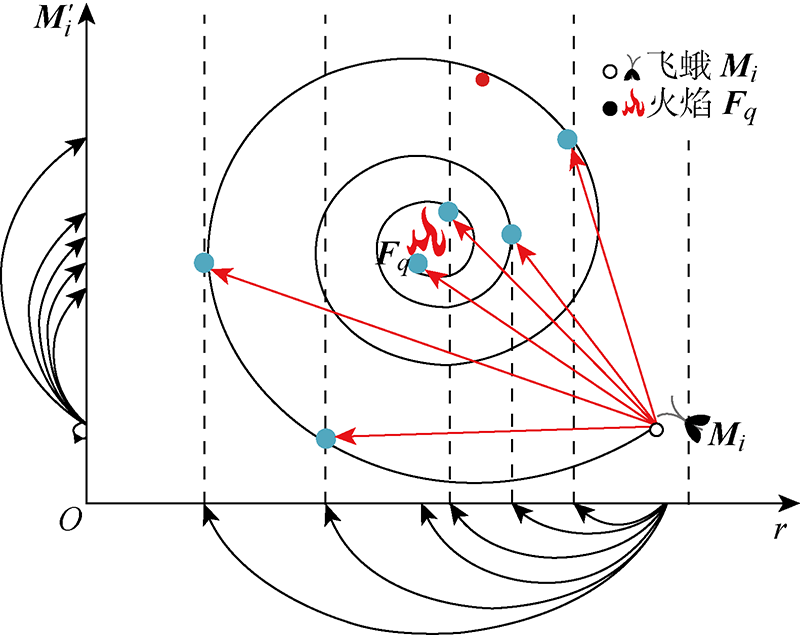
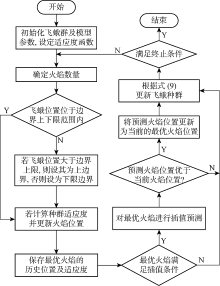
Fig.2
Flow chart of AIMFO algorithm
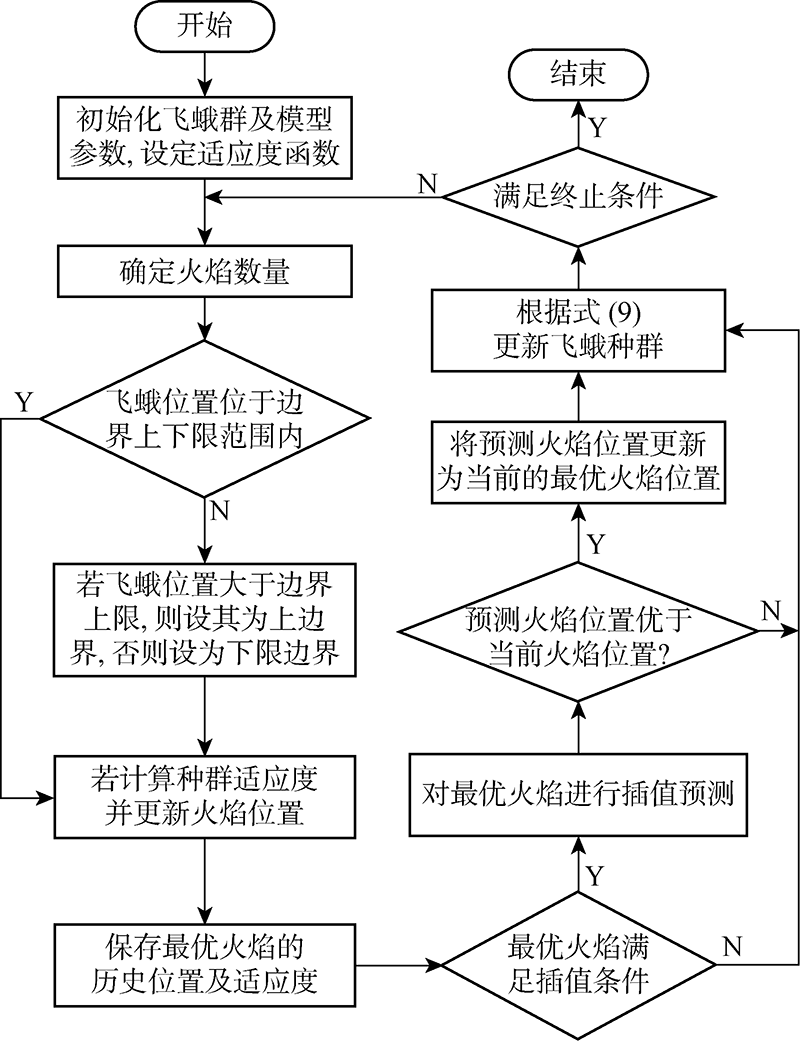

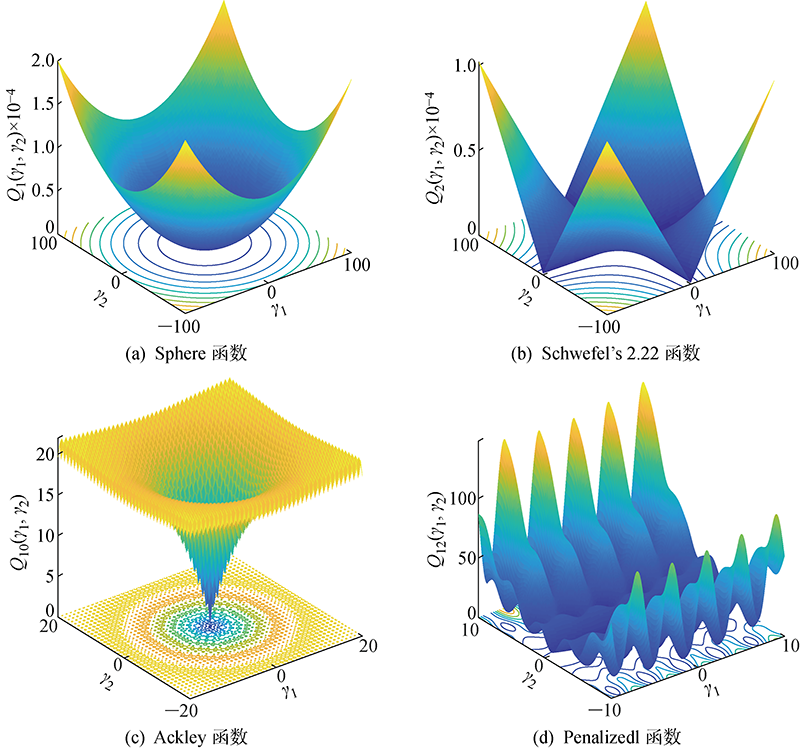
Fig.3
3D graph of test functions
Tab.1
Experimental comparison of five algorithms in test functions
| 测试函数 | 算法 | 最优值 | 均值 | 标准差 | 测试函数 | 算法 | 最优值 | 均值 | 标准差 |
|---|---|---|---|---|---|---|---|---|---|
| Sphere | AWPSO | 0.79 | 2.89 | 2.01 | Ackley | AWPSO | 1.58 | 3.41 | 2.11 |
| MFO | 1.28×10-14 | 3.18×10-14 | 4.97×10-14 | MFO | 1.84×10-8 | 3.58×10-7 | 3.75×10-7 | ||
| IMFO | 2.61×10-19 | 1.44×10-15 | 3.62×10-15 | IMFO | 2.49×10-10 | 2.82×10-8 | 4.61×10-8 | ||
| AMFO | 8.16×10-44 | 4.44×10-39 | 3.94×10-39 | AMFO | 8.88×10-16 | 2.01×10-14 | 5.61×10-14 | ||
| AIMFO | 1.23×10-48 | 5.46×10-44 | 7.12×10-44 | AIMFO | 8.88×10-16 | 8.88×10-16 | 8.88×10-16 | ||
| Schwefel’s 2.22 | AWPSO | 0.56 | 2.01 | 0.69 | Penalized1 | AWPSO | 1.03 | 3.98 | 2.61 |
| MFO | 8.66×10-10 | 5.21×10-9 | 3.82×10-9 | MFO | 6.45×10-16 | 2.59×10-12 | 5.15×10-11 | ||
| IMFO | 1.31×10-12 | 1.82×10-10 | 2.99×10-10 | IMFO | 5.35×10-16 | 5.52×10-15 | 7.45×10-15 | ||
| AMFO | 5.16×10-24 | 8.41×10-23 | 9.51×10-23 | AMFO | 4.83×10-16 | 2.53×10-15 | 1.32×10-15 | ||
| AIMFO | 2.13×10-28 | 5.05×10-27 | 6.48×10-27 | AIMFO | 2.12×10-17 | 8.11×10-16 | 1.21×10-16 |
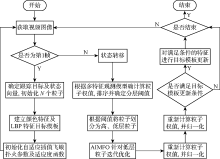
Fig.4
Flow chart of multi-feature AIMFO-PF vehicle tracking algorithm
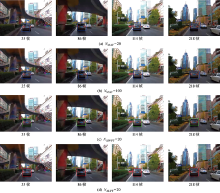
Fig.5
Results of Experiment 1
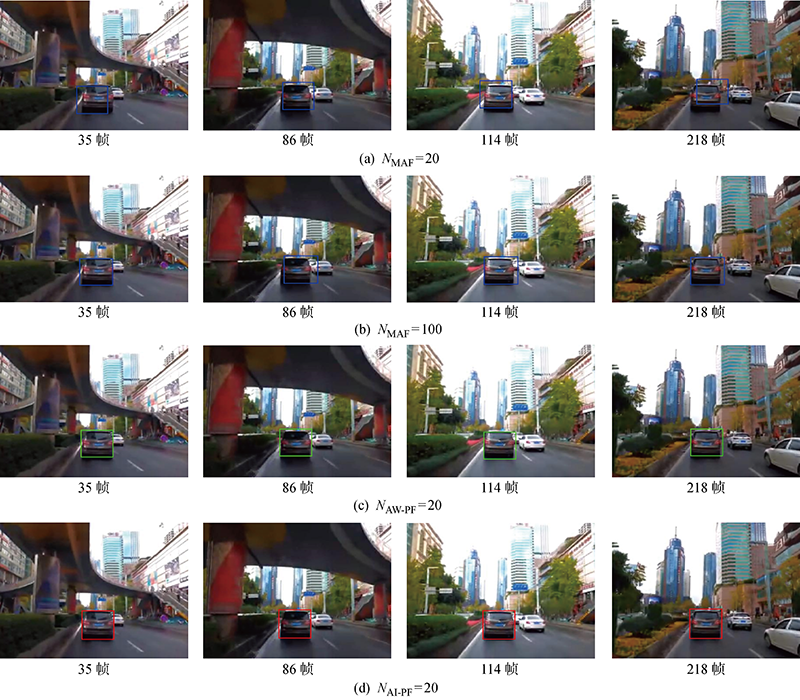
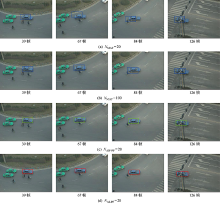
Fig.6
Results of Experiment 2
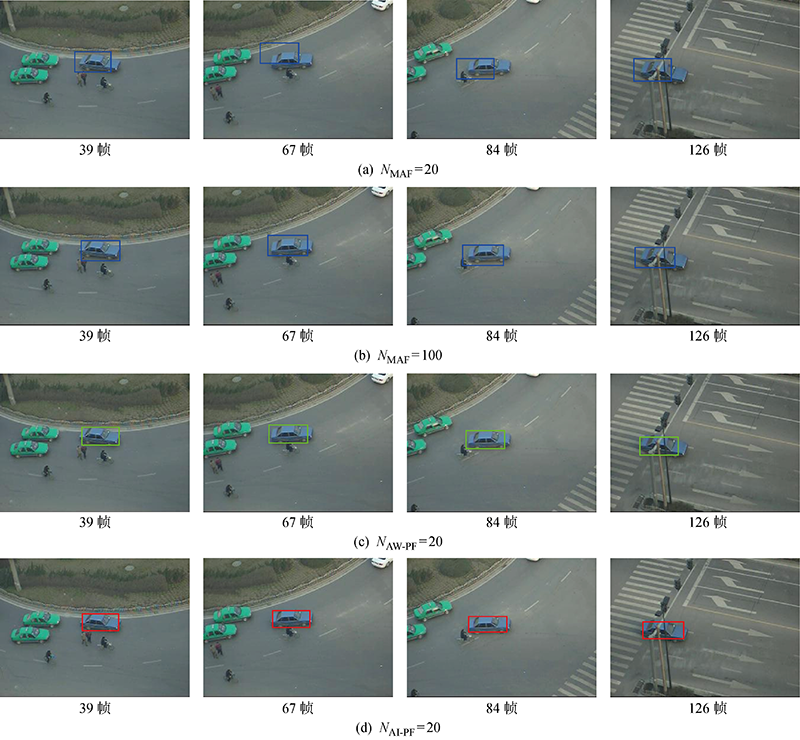
Fig.7
Results of Experiment 3
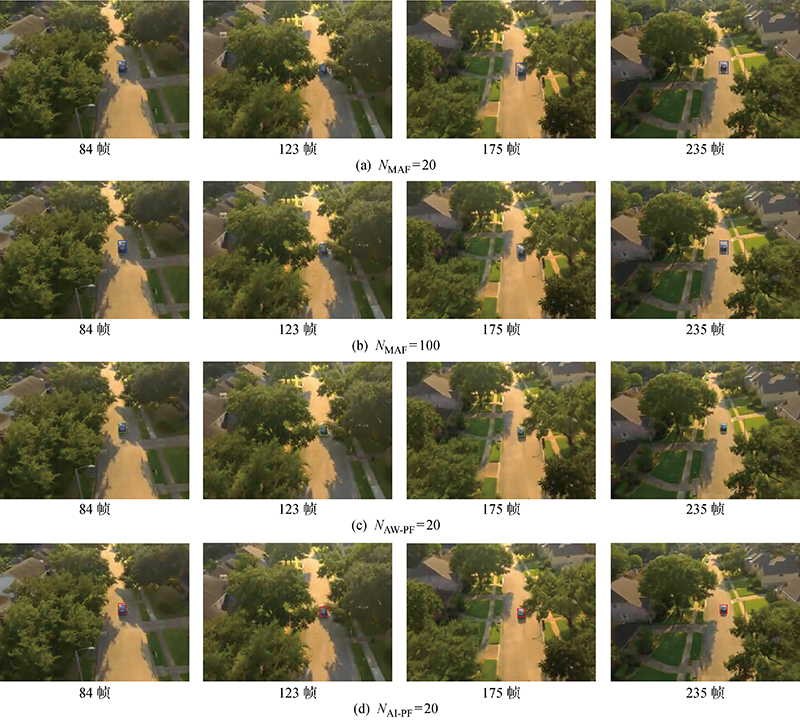
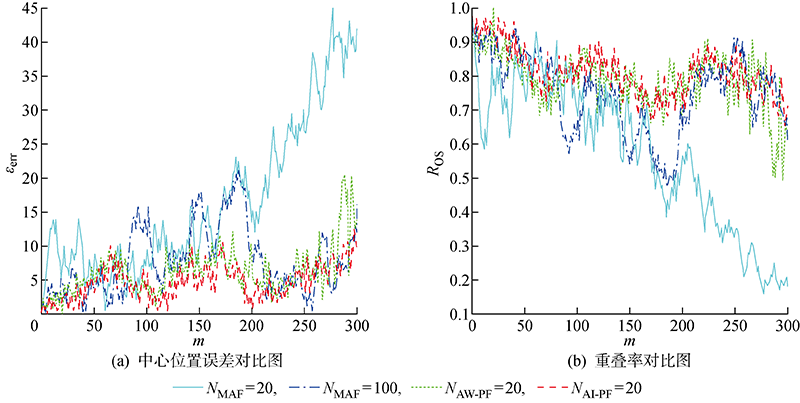
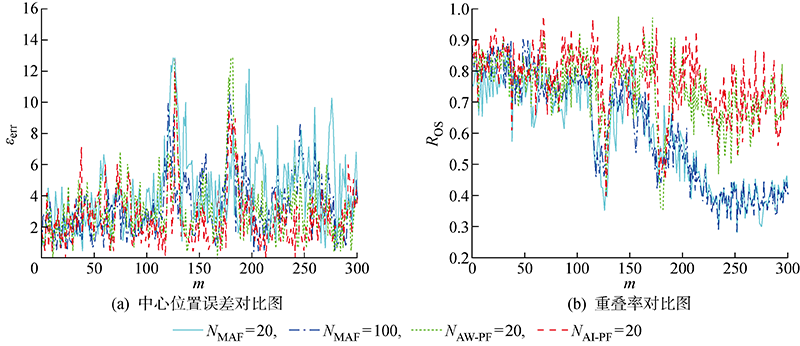
Fig.8
Position error and overlap ratio of Seq1
Tab.2
Objective evaluation table of Seq1
| 算法 | N | | | λ/% | vR/ (帧·s-1) |
|---|---|---|---|---|---|
| MAFPF | 20 | 16 | 56.98 | 63.33 | 66 |
| 100 | 7 | 74.72 | 98 | 16 | |
| 多特征AWPSO- PF车辆跟踪 | 20 | 6 | 78.57 | 99.67 | 11 |
| AIMFO-PF | 20 | 4 | 80.99 | 100 | 27 |
Fig.9
Position error and overlap ratio of Seq2

Tab.3
Objective evaluation table of Seq2
| 算法 | N | | | λ/% | vR/ (帧·s-1) |
|---|---|---|---|---|---|
| MAFPF | 20 | 10 | 60.73 | 80 | 99 |
| 100 | 6 | 72.02 | 100 | 24 | |
| 多特征AWPSO- PF跟踪 | 20 | 5 | 73.83 | 100 | 18 |
| AIMFO-PF | 20 | 4 | 75.29 | 100 | 30 |
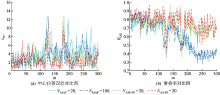
Fig.10
Position error and overlap ratio of Seq3
Tab.4
Objective evaluation table of Seq3
| 算法 | N | | | λ/% | vR/ (帧·s-1) |
|---|---|---|---|---|---|
| MAFPF | 20 | 4 | 59.18 | 63.67 | 57 |
| 100 | 3 | 61.14 | 64 | 27 | |
| 多特征 AWPSO-PF跟踪 | 20 | 3 | 73.68 | 97 | 21 |
| AIMFO-PF | 20 | 2 | 76.59 | 97.67 | 29 |
| [1] | GUCHHAIT A, B M, D K. A hybrid V2V system for collision-free high-speed Internet access in intelligent transportation system[J]. Transactions on Emerging Telecommunications Technologies, 2018, 29(3):1-9. |
| [2] |
ISARD M, BLAKE A. Condensation—Conditional density propagation for visual tracking[J]. International Journal of Computer Vision, 1998, 29(1):5-28.
doi: 10.1023/A:1008078328650 URL |
| [3] | 赵康, 王正勇, 何小海, 等. 基于改进粒子滤波的视觉目标跟踪[J]. 四川大学学报(自然科学版), 2019, 56(5):875-882. |
| ZHAO Kang, WANG Zhengyong, HE Xiaohai, et al. Visual object tracking based on improved particle filter[J]. Journal of Sichuan University (Natural Science Edition), 2019, 56(5):875-882. | |
| [4] | 金志刚, 卫津津, 罗咏梅, 等. 基于改进的颜色和SURF特征的粒子滤波目标跟踪[J]. 计算机工程与应用, 2015, 51(22):193-198. |
| JIN Zhigang, WEI Jinjin, LUO Yongmei, et al. Targets tracking based on improved color histogram and SURF features using particle filter[J]. Computer Engineering and Applications, 2015, 51(22):193-198. | |
| [5] |
LIU C G, LIU P, LIU J F, et al. 2D articulated pose tracking using particle filter with partitioned sampling and model constraints[J]. Journal of Intelligent and Robotic Systems, 2010, 58(2):109-124.
doi: 10.1007/s10846-009-9346-6 URL |
| [6] | 张琪, 胡昌华, 乔玉坤. 基于权值选择的粒子滤波算法研究[J]. 控制与决策, 2008, 23(1):117-120. |
| ZHANG Qi, HU Changhua, QIAO Yukun. Particle filter algorithm based on weight selected[J]. Control and Decision, 2008, 23(1):117-120. | |
| [7] | 田梦楚, 薄煜明, 吴盘龙, 等. 基于萤火虫优化粒子滤波的新型机动目标跟踪算法[J]. 控制与决策, 2017, 32(10):1758-1766. |
| TIAN Mengchu, BO Yuming, WU Panlong, et al. Novel target tracking method based on firefly algorithm optimized particle filter[J]. Control and Decision, 2017, 32(10):1758-1766. | |
| [8] |
NARAYANA M, NENAVATH H, CHAVAN S, et al. Intelligent visual object tracking with particle filter based on modified grey wolf optimizer[J]. Optik, 2019, 193:162913.
doi: 10.1016/j.ijleo.2019.06.013 URL |
| [9] | 胡振涛, 潘泉, 梁彦, 等. 基于进化采样的粒子滤波算法[J]. 控制理论与应用, 2009, 26(3):269-273. |
| HU Zhentao, PAN Quan, LIANG Yan, et al. The particle filter algorithm based on evolution sampling[J]. Control Theory & Applications, 2009, 26(3):269-273. | |
| [10] | EBERHART R, KENNEDY J. A new optimizer using particle swarm theory[C]//MHS’95. Proceedings of the Sixth International Symposium on Micro Machine and Human Science. Piscataway, NJ, USA: IEEE, 1995: 39-43. |
| [11] |
MIRJALILI S. Moth-flame optimization algorithm: A novel nature-inspired heuristic paradigm[J]. Knowledge-Based Systems, 2015, 89:228-249.
doi: 10.1016/j.knosys.2015.07.006 URL |
| [12] | TARIQ R, IQBAL Z, AADIL F. IMOC: Optimization technique for drone-assisted VANET (DAV) based on moth flame optimization[J]. Wireless Communications and Mobile Computing, 2020, 2020:1-29. |
| [13] |
SAYED F, KAMEL S, TAHER M A, et al. Enhancing power system loadability and optimal load shedding based on TCSC allocation using improved moth flame optimization algorithm[J]. Electrical Engineering, 2021, 103(1):205-225.
doi: 10.1007/s00202-020-01072-w URL |
| [14] | SHI J Y, ZHANG D Y, XUE F, et al. Moth-flame optimization-based maximum power point tracking for photovoltaic systems under partial shading conditions[J]. Journal of Power Electronics, 2019, 19(5):1248-1258. |
| [15] | 刘峰, 韩艳丽, 王铎. 自适应权重粒子群优化的粒子滤波算法[J]. 计算机仿真, 2013, 30(11):330-333. |
| LIU Feng, HAN Yanli, WANG Duo. Particle swarm optimization particle filtering algorithm based on adaptive weight[J]. Computer Simulation, 2013, 30(11):330-333. |
| [1] | GAO Honglian, YOU Jie, CAO Songyin. In-Flight Alignment Method of Integrated SINS/GPS Navigation System Based on Combined PF-UKF Filter [J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1447-1452. |
| [2] | CHEN Jiacheng (陈佳诚), LI Lin(李 霖), YANG Xubo (杨旭波). Efficient Online Vehicle Tracking for Real–Virtual Mapping Systems [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(5): 598-606. |
| [3] | HOU Yuguan, HAN Yuanpeng, XIE Jinyue, MAO Xingpeng. A Radar DOA Tracking Method for Multiple Targets Based on SDE Model [J]. Air & Space Defense, 2021, 4(1): 41-46. |
| [4] | PENG Pai, CHEN Cong , YANG Yongsheng . Particle Swarm Optimization Based on Hybrid Kalman Filter and Particle Filter [J]. J Shanghai Jiaotong Univ Sci, 2020, 25(6): 681-688. |
| [5] | BI Xiaojun,HU Songyi. Firefly Algorithm with High Precision Mixed Strategy Optimized Particle Filter [J]. Journal of Shanghai Jiaotong University, 2019, 53(2): 232-238. |
| [6] | ZHANG Liang (张梁), BAO Qilian *(鲍其莲), CUI Ke (崔科), JIANG Yaodong (蒋耀东), XU Haigui (徐海贵), DU Yuding (杜雨丁). Particle Filter and Its Application in the Integrated Train Speed Measurement [J]. Journal of Shanghai Jiao Tong University (Science), 2019, 24(1): 130-136. |
| [7] | SUN Yiqi,WU Aiguo,DONG Na,SHAO Yizhe. A Novel Algorithm for Hand Tracking with Particle Filter and Improved GVF Snake [J]. Journal of Shanghai Jiaotong University, 2018, 52(7): 801-807. |
| [8] | ZHAO Guoqia,b,YANG Minga,b,WANG Binga,b,WANG Chunxiangc. Mobile Robot Seamless Localization Based on Smart Device in Indoor and Outdoor Environments [J]. Journal of Shanghai Jiaotong University, 2018, 52(1): 13-19. |
| [9] | ZHANG Tie,MA Qiongxiong. Human Object Tracking Algorithm for Human-Robot Interaction [J]. Journal of Shanghai Jiaotong University, 2015, 49(08): 1213-1219. |
| [10] | LI Xiongjie1,2,ZHOU Donghua2. Fault Diagnosis Based on Particle Filter for Hybrid System [J]. Journal of Shanghai Jiaotong University, 2015, 49(06): 849-854. |
| [11] | HOU Jing* (侯 静), JING Zhan-rong (景占荣), YANG Yan (羊 彦). Target Tracking in Standoff Jammer Using Unscented Kalman Filter and Particle Fiter with Negative Information [J]. Journal of shanghai Jiaotong University (Science), 2014, 19(2): 181-189. |
| [12] | CAO Jiea,b,LI Yuqina,WU Dib. A High Precision Particle Filter Based on Improved Differential Evolution [J]. Journal of Shanghai Jiaotong University, 2014, 48(12): 1714-1720. |
| [13] | LI Xiaoxu1,DAI Bin1,CAO Jie1,2. An Improved UPF Object Tracking Algorithm Based on Multi-Feature Fusion [J]. Journal of Shanghai Jiaotong University, 2014, 48(10): 1473-1478. |
| [14] | PEI Fujun,LI Haoyang,WU Mei. Distributed Unscented Marginalized Particle Filter for Simultaneous Localization and Mapping [J]. Journal of Shanghai Jiaotong University, 2014, 48(07): 986-992. |
| [15] | LIU Shirong1,2,WU Chu1,3,ZHANG Botao1,2,ZHANG Haibing1,2. A Tracking Algorithm Based on SIFT Feature and Particle Filter with Epipolar Constraint [J]. Journal of Shanghai Jiaotong University, 2014, 48(07): 1026-1032. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||