Journal of Shanghai Jiao Tong University ›› 2022, Vol. 56 ›› Issue (5): 594-603.doi: 10.16183/j.cnki.jsjtu.2021.108
Special Issue: 《上海交通大学学报》2022年“机械与动力工程”专题
• Mechanical Engineering • Previous Articles Next Articles
JIANG Junhao, CHEN Gang( )
)
Received:2021-04-09
Online:2022-05-28
Published:2022-06-07
Contact:
CHEN Gang
E-mail:gang0418@163.com
CLC Number:
JIANG Junhao, CHEN Gang. Dynamic Model Predictive Control Method for Steering Control of Driving Robot[J]. Journal of Shanghai Jiao Tong University, 2022, 56(5): 594-603.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2021.108

Fig.1
Overall structure of driving robot
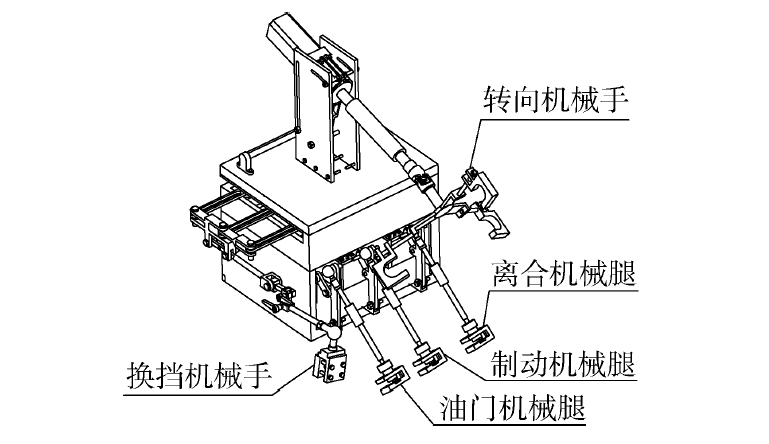
Fig.2
Structure of steering mechanical arm
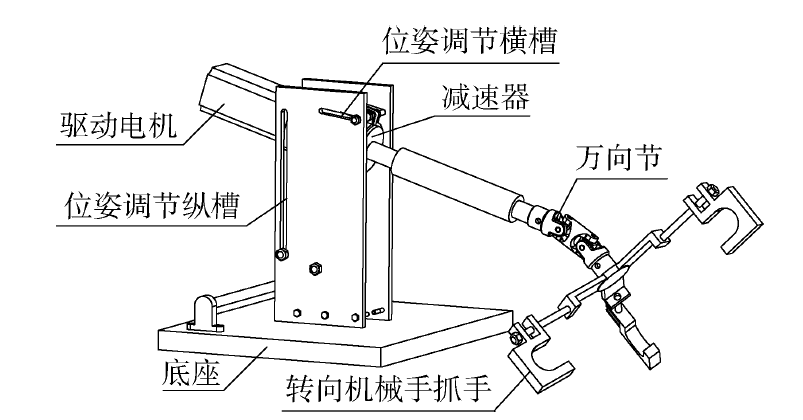
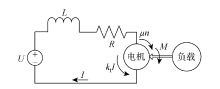
Fig.3
Equivalent circuit of driving motor for steering mechanical arm
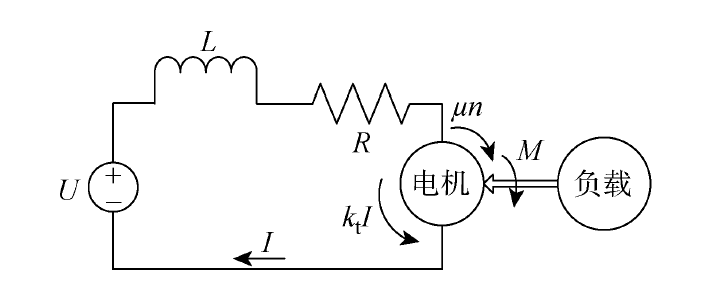
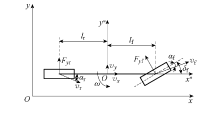
Fig.4
Controlled vehicle model
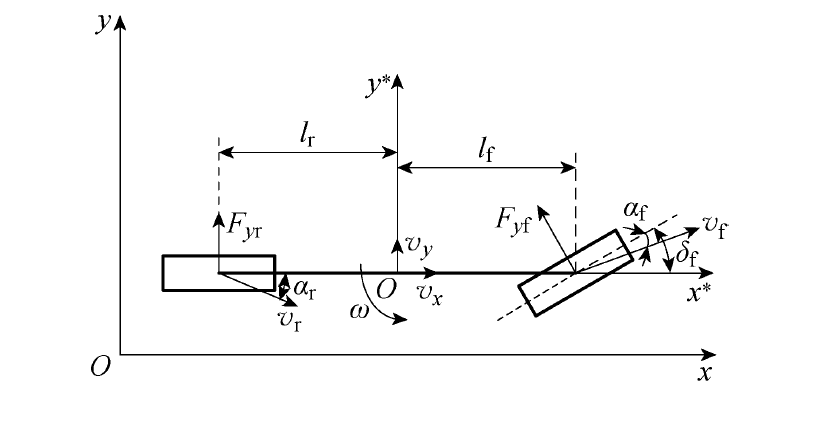
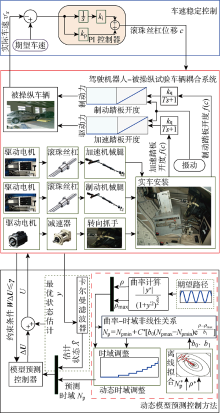
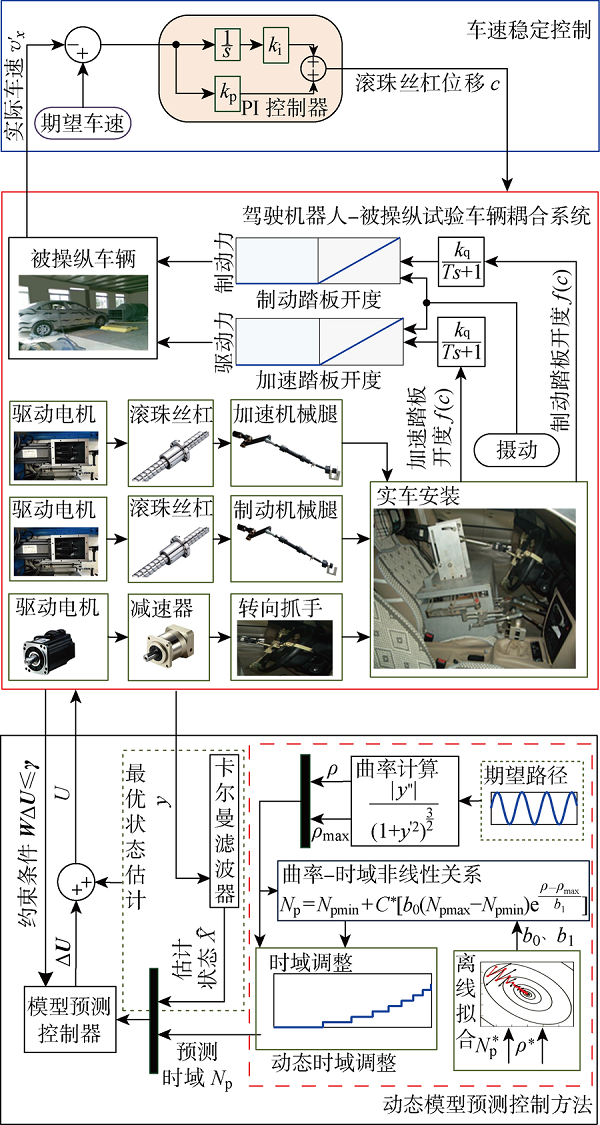
Fig.5
Structure chart of dynamic model predictive control for driving robot-controlled vehicle
Tab.1
Data of prediction horizon
| ρ/m-1 | | ρ/m-1 | |
|---|---|---|---|
| 0 | 8 | 0.14 | 12 |
| 0.02 | 9 | 0.16 | 13 |
| 0.04 | 10 | 0.18 | 14 |
| 0.06 | 10 | 0.20 | 15 |
| 0.08 | 11 | 0.22 | 17 |
| 0.10 | 11 | 0.24 | 18 |
| 0.12 | 12 |
Tab.2
Results of fitting
| 参数 | 最终值 | 95%置信区间 |
|---|---|---|
| b0 | 0.1016 | (0.07692, 0.1264) |
| b1 | 0.1089 | (0.09469, 0.1231) |
Tab.3
Evaluation results of fitting
| 评价指标 | 取值 |
|---|---|
| 均方根误差 | 0.44 |
| 确定系数 | 0.98 |
| 自由度调整确定系数 | 0.97 |
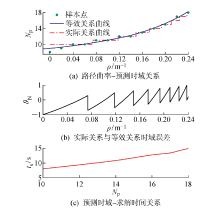
Fig.6
Results of prediction horizon adjustment method


Fig.7
Installation of unmanned robot on test vehicle

Tab.4
Key parameters
| 对象 | 参数 | 数值 | 对象 | 参数 | 数值 |
|---|---|---|---|---|---|
| 驾驶机器人 | L/H | 0.012 | 驾驶机器人 | μ/(N·m·rpm-1) | 0.05 |
| kt/(N·m·A-1) | 0.47 | R/Ω | 0.42 | ||
| ke/[V·(rad·s)-1] | 0.0172 | i0 | 15 | ||
| 被操纵车辆 | m/kg | 1126 | 被操纵车辆 | K0/(N·m·rad-1) | 6000 |
| lf/m | 1.014 | Je/(kg·m2) | 14 | ||
| lr/m | 1.534 | e/m | 0.0035 | ||
| Kf/(N·rad-1) | 51480 | Jz/(kg·m2) | 2697 | ||
| Kr/(N·rad-1) | 87416 | ie | 20 | ||
| 控制器 | ΔUmax/V | 3 | 控制器 | Npmin | 8 |
| ΔUmin/V | -3 | | 20000 | ||
| Umax/V | 24 | | 0.1 | ||
| Umin/V | -24 | Nc | 10 | ||
| Npmax | 19 |

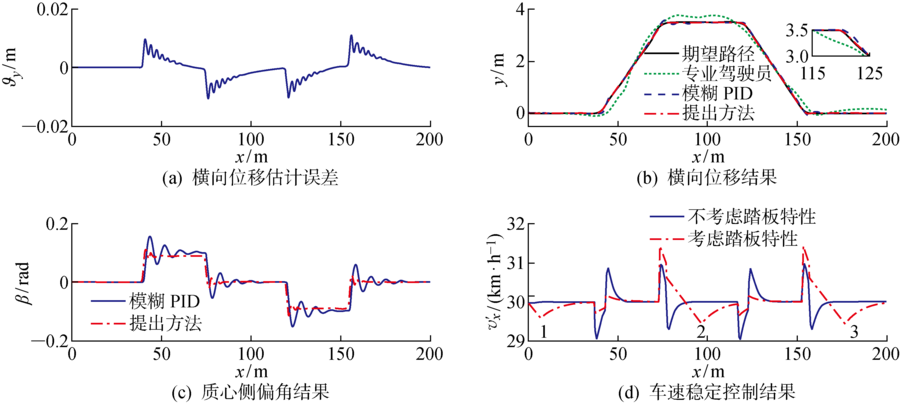
Fig.8
Test results of double lane changing condition
Tab.5
Parameters adjustment results of PI controller
| 工况 | kp | ki |
|---|---|---|
| 不考虑踏板特性 | 160.5 | 424.9 |
| 考虑踏板特性 | 193.9 | 465.9 |

Fig.9
Simulation results of lane changing condition

| [1] |
CHEN G, ZHANG W G. Hierarchical coordinated control method for unmanned robot applied to automotive test[J]. IEEE Transactions on Industrial Electronics, 2016, 63(2): 1039-1051.
doi: 10.1109/TIE.2015.2477266 URL |
| [2] |
ALT B, HERMANN E, SVARICEK F. Second order sliding modes control for rope winch based automotive driver robot[J]. International Journal of Vehicle Design, 2013, 62(2/3/4): 147.
doi: 10.1504/IJVD.2013.052707 URL |
| [3] |
HUANG X N, ZHANG S, PENG H E. Developing robot driver etiquette based on naturalistic human driving behavior[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(4): 1393-1403.
doi: 10.1109/TITS.2019.2913102 URL |
| [4] | 刘坤明, 徐国艳, 余贵珍. 驾驶机器人机械腿动力学建模与仿真分析[J]. 北京航空航天大学学报, 2016, 42(8): 1709-1714. |
| LIU Kunming, XU Guoyan, YU Guizhen. Dynamics modeling and simulation analysis of robot driver’s mechanical legs[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(8): 1709-1714. | |
| [5] |
ZHU Y H, FU Z Y, FU Z, et al. Multi-features fusion for diagnosis of pedal robot using time-speed signals[J]. Sensors, 2019, 19(1): 163-176.
doi: 10.3390/s19010163 URL |
| [6] |
CHEN G, CHEN S B, LANGARI R, et al. Driver-behavior-based adaptive steering robust nonlinear control of unmanned driving robotic vehicle with modeling uncertainties and disturbance observer[J]. IEEE Transactions on Vehicular Technology, 2019, 68(8): 8183-8190.
doi: 10.1109/TVT.2019.2922452 URL |
| [7] |
WONG N, CHAMBERS C, STOL K, et al. Development of a robotic driver for autonomous vehicle following[J]. International Journal of Intelligent Systems Technologies and Applications, 2010, 8(1/2/3/4): 276.
doi: 10.1504/IJISTA.2010.030205 URL |
| [8] | 吴俊, 陈刚. 驾驶机器人车辆的多模式切换控制[J]. 汽车工程, 2018, 40(10): 1215-1222. |
| WU Jun, CHEN Gang. Multi-mode switching control for robot driven vehicles[J]. Automotive Engineering, 2018, 40(10): 1215-1222. | |
| [9] | SPENCER M, JONES D, KRAEHLING M, et al. Trajectory based autonomous vehicle following using a robotic driver[C]// 2009 Australasian Conference on Robotics and Automation. Sydney, Australia: ARAA, 2009: 325-335. |
| [10] | 余贵珍, 俞志华, 康乐, 等. 一种用于车辆道路试验的自动驾驶机器人: CN 102435442 B[P]. 2013-11-13[2021-03-24]. |
| YU Guizhen, YU Zhihua, KANG Le, et al. Automatic drive robot used in vehicle road tests: CN 102435442 B[P]. 2013-11-13[2021-03-24]. | |
| [11] |
SU S H, CHEN G. Lateral robust iterative learning control for unmanned driving robot vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2020, 234(7): 792-808.
doi: 10.1177/0959651820904834 URL |
| [12] | WONG N, CHAMBERS C, STOL K, et al. Autonomous vehicle following using a robotic driver[C]// 2008 15th International Conference on Mechatronics and Machine Vision in Practice. Auckland, New Zealand: IEEE, 2008: 115-120. |
| [13] |
ZHANG B, ZONG C F, CHEN G Y, et al. An adaptive-prediction-horizon model prediction control for path tracking in a four-wheel independent control electric vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2019, 233(12): 3246-3262.
doi: 10.1177/0954407018821527 URL |
| [14] | 何德峰, 彭彬彬, 顾煜佳, 等. 基于高斯过程回归的车辆巡航系统学习预测控制[J]. 上海交通大学学报, 2020, 54(9): 904-909. |
| HE Defeng, PENG Binbin, GU Yujia, et al. Learning predictive control of vehicular automated cruise systems based on Gaussian process regression[J]. Journal of Shanghai Jiao Tong University, 2020, 54(9): 904-909. | |
| [15] | 曹阳, 贺登博, 喻凡, 等. 基于主动转向的车辆路径跟随广义预测控制[J]. 上海交通大学学报, 2016, 50(3): 401-406. |
| CAO Yang, HE Dengbo, YU Fan, et al. Generalized predictive control based on vehicle path following strategy by using active steering system[J]. Journal of Shanghai Jiao Tong University, 2016, 50(3): 401-406. | |
| [16] | 中华人民共和国生态环境部. 轻型车辆污染物排放限值及测量方法(中国第六阶段)[S]. 北京: 中国环境科学出版集团, 2016. |
| Ministry of Ecology and Environment of the People’s Republic of China. Limits and measurement methods for emissions from light-duty vehicles (CHINA 6) [S]. Beijing: China Environmental Publishing Group, 2016. | |
| [17] |
陈刚, 王和荣. 驾驶机器人车辆动态制动力矩补偿[J]. 中国公路学报, 2020, 33(2): 181-190.
doi: 10.19721/j.cnki.1001-7372.2020.02.017 |
|
CHEN Gang, WANG Herong. Dynamic braking torque compensation for a driving robot vehicle[J]. China Journal of Highway and Transport, 2020, 33(2): 181-190.
doi: 10.19721/j.cnki.1001-7372.2020.02.017 |
|
| [18] |
LIU Y, ZONG C F, ZHANG D. Lateral control system for vehicle platoon considering vehicle dynamic characteristics[J]. IET Intelligent Transport Systems, 2019, 13(9): 1356-1364.
doi: 10.1049/iet-its.2018.5504 URL |
| [19] | International Standard Organization. Passenger cars—Test track for a serve lane-change manoeuvre—Part 1: Double lane-change: ISO 3888-1 [S]. Switzerland: ISO Copyright Office, 2018. |
| [1] | LIU Yuanyuan, ZHANG Shunjia, YANG Yi, GENG Jianqiang. A Robust Passive Localization Algorithm Based on Spherical Cubature Kalman Filter [J]. Air & Space Defense, 2025, 8(5): 53-63. |
| [2] | ZHANG Yuge, GENG Jianqiang, YANG Guangyu, ZHU Supeng, HOU Zhenqian, FU Wenxing. Multi-Missile Cooperative Passive Localization Algorithm Based on IMM-SRCKF for Maneuvering Targets [J]. Air & Space Defense, 2025, 8(2): 58-65. |
| [3] | FAN Pengfei, LI Qingbo, LI Zhen, CHEN Chenglin. Research on Guidance Information Extraction Algorithm Based on Radar Relative Measurement [J]. Air & Space Defense, 2025, 8(2): 50-57. |
| [4] | ZHONG Yiming1, YU Caoyang1, 2, XIANG Xianbo2, 3, LIAN Lian1, 4. Motion Prediction of Marine Vehicles Based on Cascaded Filter and Error-Triggered Support Vector Regression [J]. Ocean Engineering Equipment and Technology, 2025, 12(1): 133-140. |
| [5] | HE Qinglin, ZHAO Hongyu, CHEN Yuxuan, HOU Xianghao. Design of Distributed Underwater Acoustic Tracking Algorithm for Aerial Targets Based on CRLB [J]. Air & Space Defense, 2025, 8(1): 86-94. |
| [6] | XIA Yang1 (夏杨), REN Guanghui2 (任光辉), WAN Yuan1 (万缘), MAO Xuchu1∗ (茅旭初). Multi-GNSS Fusion Real-Time Kinematic Algorithm Based on Extended Kalman Filter Correction Model for Medium-Long Baselines [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(6): 1191-1201. |
| [7] | TANG Shengjing, WANG Taiyan, ZHAO Ganglian, GUO Jie, LI Jiali, YIN Hang(. Review of Multi-Sensor Data Fusion for Target Tracking [J]. Air & Space Defense, 2024, 7(4): 18-29. |
| [8] | QIAN Leiyuan, QIN Fangjun, LI Kailong, ZHU Tiangao. Robust Adaptive Algorithm Based on SE(3) and Its Application in SINS/DVL [J]. Journal of Shanghai Jiao Tong University, 2024, 58(4): 498-510. |
| [9] | DU Ning, WU Shufan, CHEN Zhansheng, CHEN Wenhui, WANG Shiyao, XU Jiaguo, QIN Dongdong. Attitude Planning Method of Satellite Staring Imaging to Aerial Dynamic Target [J]. Journal of Shanghai Jiao Tong University, 2024, 58(4): 411-418. |
| [10] | CHEN Kun(陈坤), ZHAO Xu(赵旭), DONG Chunyu(董春玉), DI Zichao(邸子超), CHEN Zongzhi(陈宗枝). Anti-Occlusion Object Tracking Algorithm Based on Filter Prediction [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(3): 400-413. |
| [11] | WU Jiang, ZHANG Yan, LIU Zelong, CHENG Gang, LEI Dong, JIAO Chaoyong. State of Charge Estimation of Lithium-Ion Battery Considering Operating Conditions and Aging Degree [J]. Journal of Shanghai Jiao Tong University, 2024, 58(12): 1935-1945. |
| [12] | LI Dingjia1,2,3,4(黎定佳),WANG Chongang1,2,3(王重阳),GUO Wei5(郭伟),WANG Zhidong6(王志东),ZHANG Zhongtao5(张忠涛),LIU Hao1,2,3*(刘浩). Shape Sensing for Single-Port Continuum Surgical Robot Using Few Multicore Fiber Bragg Grating Sensors [J]. J Shanghai Jiaotong Univ Sci, 2023, 28(3): 312-322. |
| [13] |
Wang Yafeng, Huang Peishuo, , Yu Xiaqiong, Song Lei, Yu Wenbin.
Processing of Beidou Positioning Error in the Integrated Navigation for Use At Sea [J]. Ocean Engineering Equipment and Technology, 2023, 10(3): 76-82. |
| [14] | WANG Mingyang (王明阳), SHI Liangren∗ (时良仁), LI Yuanlong (李元龙). Indoor Vehicle Positioning Based on Multi-Sensor Data Fusion [J]. J Shanghai Jiaotong Univ Sci, 2023, 28(1): 77-85. |
| [15] | ZHAO Yong, SU Dan. Rogue Wave Prediction Based on Four Combined Long Short-Term Memory Neural Network Models [J]. Journal of Shanghai Jiao Tong University, 2022, 56(4): 516-522. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||