Journal of Shanghai Jiao Tong University ›› 2022, Vol. 56 ›› Issue (11): 1461-1469.doi: 10.16183/j.cnki.jsjtu.2022.233
• Guidance, Navigation and Control • Previous Articles Next Articles
ZHANG Wenjia, MA Xin( )
)
Received:2022-06-21
Online:2022-11-28
Published:2022-12-02
Contact:
MA Xin
E-mail:maxin@buaa.edu.cn
CLC Number:
ZHANG Wenjia, MA Xin. A Sliding Window Adaptive Filtering Algorithm for Autonomous Navigation of the Approach Phase of Deep Space Probe[J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1461-1469.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2022.233
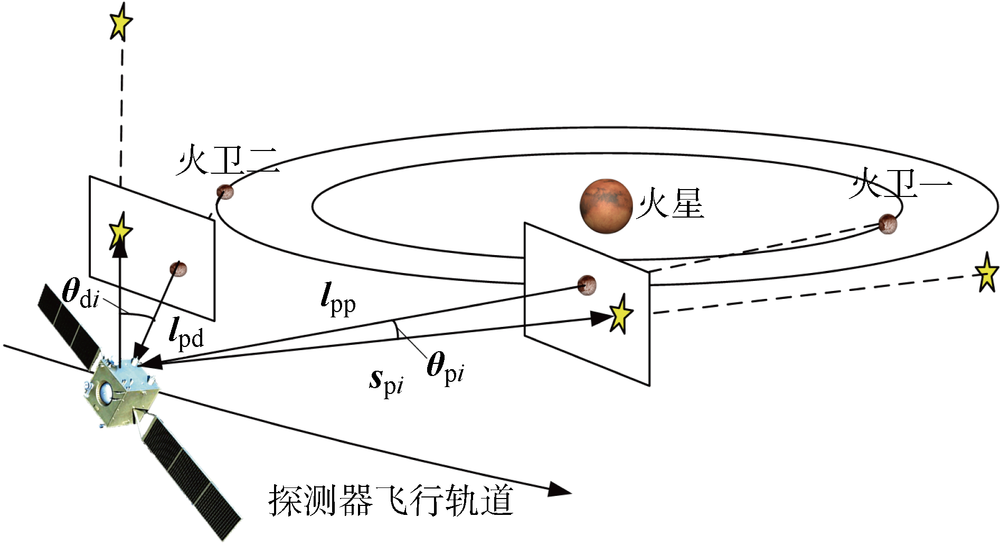
Fig.1
Angle between the star and Mars
Tab.1
Orbit parameters of Mars probe
| 参数 | 数值 |
|---|---|
| a'/km | 1.932×108 |
| e | 0.2364 |
| i'/(°) | 23.455 |
| 升交点赤经/(°) | 0.258 |
| 近地点角距/(°) | 71.347 |
| 真近角点/(°) | 85.152 |
| 接近火星时间 | 1997-01-04T17:03:13.000 |
Tab.2
Parameters of optical sensor
| 参数 | 数值 |
|---|---|
| f'/mm | 2 013.4 |
| FOV/mrad | 10×10 |
| R/(rad·像素-1) | 10 |
| CCD平面大小/像素 | 1024×1024 |
| 像素大小/m | 21 |

Fig.2
Results of UKF algorithm
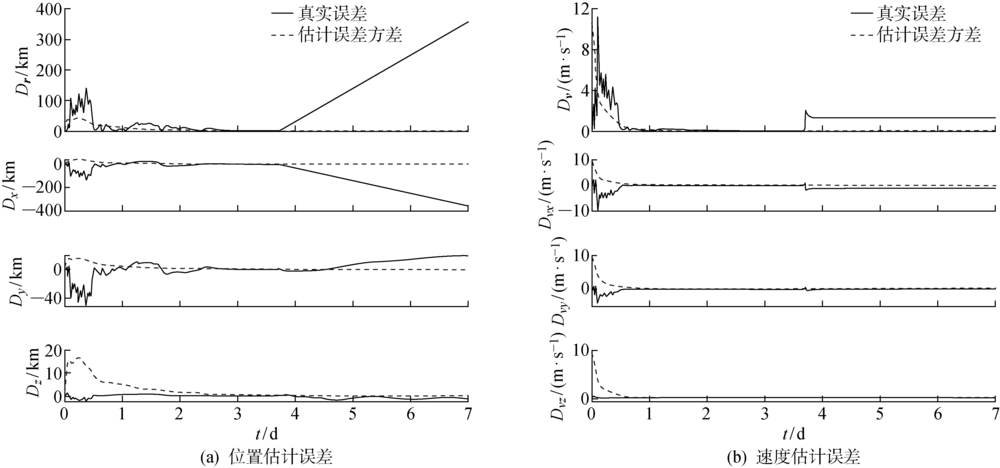

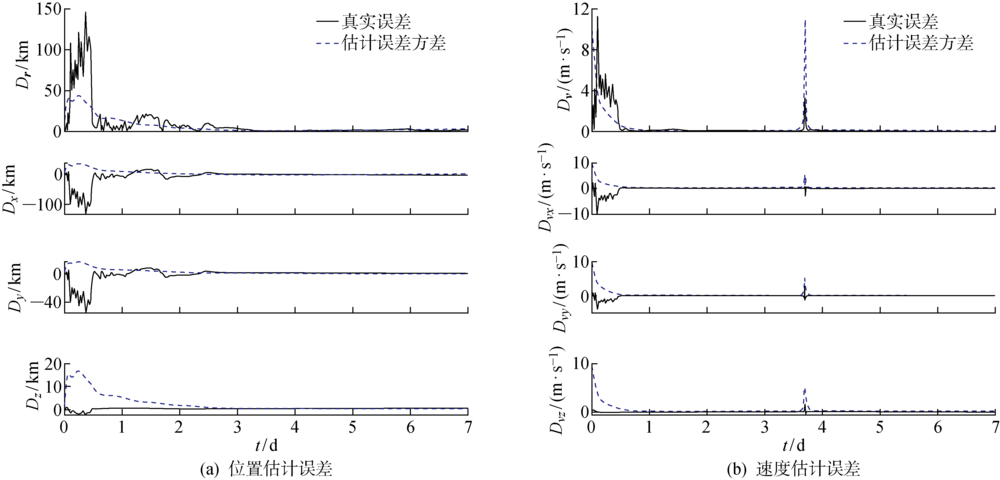
Fig.3
Results of AQUKF algorithm
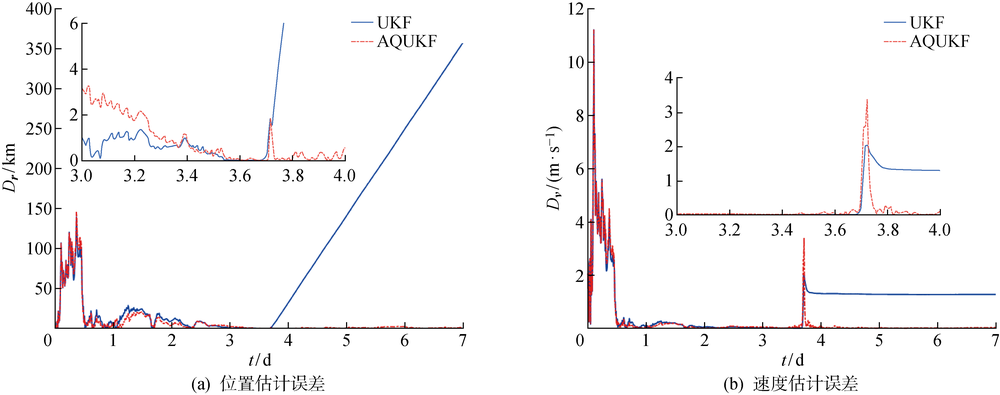
Tab.3
Results of UKF and AQUKF filtering methods
| 滤波 方法 | 估计误差平均值 | 估计误差最大值 | |||
|---|---|---|---|---|---|
| 位置/km | 速度/ (m·s-1) | 位置/km | 速度/ (m·s-1) | ||
| UKF | 92.221 2 | 0.879 7 | 355.462 5 | 11.166 9 | |
| AQUKF | 8.323 4 | 0.297 6 | 146.019 5 | 11.173 0 | |

Fig.4
Comparison of estimation error between UKF algorithm and AQUKF algorithm
Tab.4
Influence of filtering period on accuracy of navigation algorithm
| T/s | 估计误差平均值 | 估计误差最大值 | |||
|---|---|---|---|---|---|
| 位置/km | 速度/(m·s-1) | 位置/km | 速度/(m·s-1) | ||
| 120 | 3.106 5 | 0.158 1 | 51.003 | 11.904 3 | |
| 300 | 4.103 0 | 0.167 8 | 78.635 | 12.492 3 | |
| 600 | 8.323 4 | 0.297 6 | 146.019 | 11.173 0 | |
| 900 | 7.797 1 | 0.280 2 | 102.540 | 9.872 7 | |
| 1 200 | 11.574 0 | 0.538 7 | 109.420 | 56.290 3 | |

Fig.5
Influence of filtering period on position error and velocity error
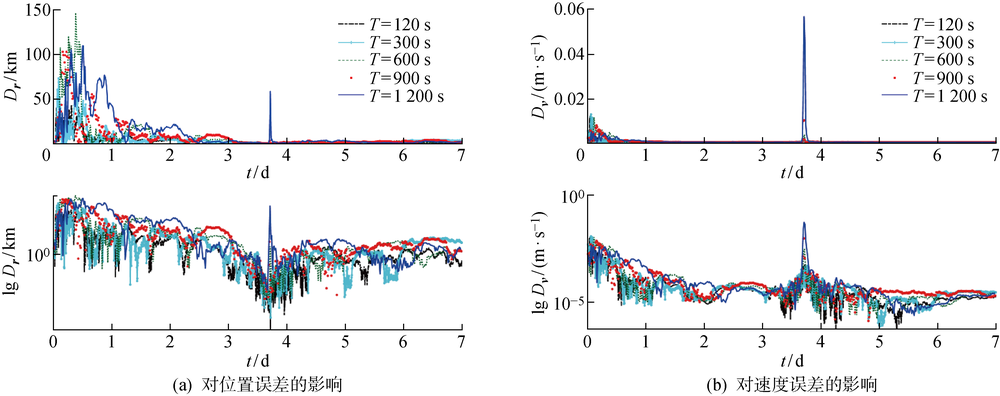

Fig.6
Influence of window size on position error and velocity error

Tab.5
Influence of window size on accuracy of navigation algorithm
| N | 估计误差平均值 | 估计误差最大值 | |||
|---|---|---|---|---|---|
| 位置/km | 速度/(m·s-1) | 位置/km | 速度/(m·s-1) | ||
| 1 | 8.572 8 | 0.316 1 | 150.67 | 11.197 3 | |
| 5 | 8.412 2 | 0.300 1 | 148.27 | 11.178 1 | |
| 10 | 8.323 4 | 0.297 6 | 146.02 | 11.173 0 | |
| 50 | 8.545 2 | 0.312 8 | 141.62 | 11.168 2 | |
| 100 | 8.850 2 | 0.312 7 | 140.63 | 11.167 5 | |
| 300 | 9.579 0 | 0.307 9 | 139.87 | 11.167 2 | |
| [1] | 吴伟仁, 王大轶, 宁晓琳. 深空探测器自主导航原理与技术[M]. 北京: 中国宇航出版社, 2011. |
| WU Weiren, WANG Dayi, NING Xiaolin. Principle and technology of autonomous navigation for deep-space probe[M]. Beijing: China Astronautic Publishing House, 2011. | |
| [2] | 房建成, 宁晓琳. 深空探测器自主天文导航方法[M]. 西安: 西北工业大学出版社, 2010. |
| FANG Jiancheng, NING Xiaolin. Autonomous celestial navigation method for a deep-space probe[M]. Xi’an: Northwestern Polytechnic University Press, 2010. | |
| [3] |
YU Z S, CUI P Y, CRASSIDIS J L. Design and optimization of navigation and guidance techniques for Mars pinpoint landing: Review and prospect[J]. Progress in Aerospace Sciences, 2017, 94: 82-94.
doi: 10.1016/j.paerosci.2017.08.002 URL |
| [4] |
MA X, NING X L, FANG J C. Analysis of orbital dynamic equation in navigation for a Mars gravity-assist mission[J]. The Journal of Navigation, 2012, 65(3): 531-548.
doi: 10.1017/S0373463312000100 URL |
| [5] | BHASKARAN S. Autonomous navigation for deep space missions[C]∥SpaceOps 2012 Conference. Stockholm, Sweden: AIAA, 2012: 1267135. |
| [6] |
FANG J C, YANG Y, Study on innovation adaptive EKF for in-flight alignment of airborne POS[J]. IEEE Transactions on Instrumentation and Measurement, 2011, 60(4): 1378-1388.
doi: 10.1109/TIM.2010.2084710 URL |
| [7] |
NING X L, LI Z, YANG Y Q, et al. Analysis of ephemeris errors in autonomous celestial navigation during Mars approach phase[J]. The Journal of Navigation, 2017, 70(3): 505-526.
doi: 10.1017/S0373463316000734 URL |
| [8] |
SI F, ZHAO Y, LIN Y H. Adaptively tuning sampling weights of the unscented Kalman filter in starlight refraction navigation[J]. Optik, 2017, 148: 300-311.
doi: 10.1016/j.ijleo.2017.08.097 URL |
| [9] |
XIONG K, WEI C L, LIU L D. Multiple-model adaptive estimation for space surveillance with measurement uncertainty[J]. Optimal Control Applications and Methods, 2016, 37(2): 404-423.
doi: 10.1002/oca.2176 URL |
| [10] |
LIU W W, LIU Y C, BUCKNALL R. A robust localization method for unmanned surface vehicle (USV) navigation using fuzzy adaptive Kalman filtering[J]. IEEE Access, 2019, 7: 46071-46083.
doi: 10.1109/ACCESS.2019.2909151 URL |
| [11] |
GAO X L, LUO H Y, BAO B K, et al. RL-AKF: An adaptive Kalman filter navigation algorithm based on reinforcement learning for ground vehicles[J]. Remote Sensing, 2020, 12(11): 1704.
doi: 10.3390/rs12111704 URL |
| [12] |
FRASER C T, ULRICH S. Adaptive extended Kalman filtering strategies for spacecraft formation relative navigation[J]. Acta Astronautica, 2021, 178: 700-721.
doi: 10.1016/j.actaastro.2020.10.016 URL |
| [13] | 卞鸿巍, 金志华, 王俊璞, 等. 组合导航系统新息自适应卡尔曼滤波算法[J]. 上海交通大学学报, 2006, 40(6): 1000-1003. |
| BIAN Hongwei, JIN Zhihua, WANG Junpu, et al. The innovation-based estimation adaptive Kalman filter algorithm for INS/GPS integrated navigation system[J]. Journal of Shanghai Jiao Tong University, 2006, 40(6): 1000-1003. | |
| [14] | HUANG B H, WANG J J, ZHANG J F, et al. Variational bayesian adaptive Kalman filter for integrated navigation with unknown process noise covariance[C]∥2022 2nd International Conference on Consumer Electronics and Computer Engineering. Guangzhou, China: IEEE, 2022: 436-443. |
| [15] |
ZHANG J, WANG S P, LI W S, et al. A multi-mode switching variational bayesian adaptive Kalman filter algorithm for the SINS/PNS/GMNS navigation system of pelagic ships[J]. Sensors (Basel, Switzerland), 2022, 22(9): 3372.
doi: 10.3390/s22093372 URL |
| [16] |
ZHANG X Y, DUAN H B, LUO Q N. Levenberg-Marquardt based artificial physics method for mobile robot oscillation alleviation[J]. Science China Physics Mechanics Astronomy, 2014, 57(9): 1771-1777.
doi: 10.1007/s11433-013-5244-9 URL |
| [17] |
DUXBURY T C, BORN G H, JERATH N. Viewing phobos and deimos for navigating mariner[J]. Journal of Spacecraft and Rockets, 1974, 11(4): 215-222.
doi: 10.2514/3.62046 URL |
| [18] | LEE D J, ALFRIEND K. Adaptive sigma point filtering for state and parameter estimation[C]∥AIAA/AAS Astrodynamics Specialist Conference and Exhibit. Providence, Rhode Island, USA: AIAA, 2004: 1-20. |
| [19] |
BUSSE F D, HOW J P, SIMPSON J. Demonstration of adaptive extended Kalman filter for low-Earth-orbit formation estimation using CDGPS[J]. Navigation, 2003, 50(2): 79-93.
doi: 10.1002/j.2161-4296.2003.tb00320.x URL |
| [1] | JIANG Junhao, CHEN Gang. Dynamic Model Predictive Control Method for Steering Control of Driving Robot [J]. Journal of Shanghai Jiao Tong University, 2022, 56(5): 594-603. |
| [2] | ZHAO Yong, SU Dan. Rogue Wave Prediction Based on Four Combined Long Short-Term Memory Neural Network Models [J]. Journal of Shanghai Jiao Tong University, 2022, 56(4): 516-522. |
| [3] | YANG Tao (杨 涛), ZHAO Jiankang∗ (赵健康). Solution to Long-Range Continuous and Precise Positioning in Deep Ocean for Autonomous Underwater Vehicles Using Acoustic Range Estimation and Inertial Sensor Measurements [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(3): 281-297. |
| [4] | GAO Honglian, YOU Jie, CAO Songyin. In-Flight Alignment Method of Integrated SINS/GPS Navigation System Based on Combined PF-UKF Filter [J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1447-1452. |
| [5] | DONG Xiangxiang, LÜ Runyan, CAI Yunze*. A Variational Bayes-Based Filter with Uncertain Heavy-Tailed Noise [J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 881-889. |
| [6] | PENG Pai, CHEN Cong , YANG Yongsheng . Particle Swarm Optimization Based on Hybrid Kalman Filter and Particle Filter [J]. J Shanghai Jiaotong Univ Sci, 2020, 25(6): 681-688. |
| [7] | CUI Naigang , CAI Ligen, RONG Siyuan. High-speed Gliding Target Tracking Algorithm Based on Digraph Switching IMM-CKF [J]. Air & Space Defense, 2020, 3(3): 1-8. |
| [8] | ZHANG Jihua, WEI Yali, LI Zhi, ZHOU Xiaochuan. Research on Filtering Algorithm of Missileborne Single-base Angular Measurement & Passive Positioning [J]. Air & Space Defense, 2020, 3(1): 34-40. |
| [9] | HU Bing,YANG Ming,GUO Lindong,WANG Chunxiang,WANG Bing. Global Localization for Intelligent Vehicles Using Ground SURF [J]. Journal of Shanghai Jiaotong University, 2019, 53(2): 203-208. |
| [10] | LIAO Xin, ZHU Ying, SHI Randong, GUO Zhengyong. Bias Calibration for MEMS Gyro Based on Kalman Filter [J]. Air & Space Defense, 2019, 2(1): 33-36. |
| [11] | ZHANG Yang* (张洋), L ¨U Qiang (吕强), LIN Huican (林辉灿), MA Jianye (马建业). Research on Visual Autonomous Navigation Indoor for Unmanned Aerial Vehicle [J]. Journal of shanghai Jiaotong University (Science), 2017, 22(2): 252-256. |
| [12] | HUANG Yikun,CHEN Meishan,ZHANG Huisheng,WENG Shilie. Gas Path Diagnosis Based on Sigma Point Kalman Filter of Gas Turbine [J]. Journal of Shanghai Jiaotong University, 2016, 50(04): 534-539. |
| [13] | XUE Haijian1,WANG Jie1,2,GUO Xiaosong1,ZHOU Zhaofa1. Design of a Strong Tracing UKF for Nonlinear SelfAlignment of SINS [J]. Journal of Shanghai Jiaotong University, 2015, 49(09): 1429-1434. |
| [14] | LIU Xiaodong,ZHONG Maiying,LIU Hai. EKF-Based Fault Detection of Unmanned Aerial Vehicle Flight Control System [J]. Journal of Shanghai Jiaotong University, 2015, 49(06): 884-888. |
| [15] | SI Xiaosheng1,HU Changhua1,LI Juan2,SUN Guoxi3,ZHANG Qi1. Remaining Useful Life Prediction of Nonlinear Stochastic Degrading Systems Subject to Uncertain Measurements [J]. Journal of Shanghai Jiaotong University, 2015, 49(06): 855-860. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||