Journal of Shanghai Jiao Tong University ›› 2021, Vol. 55 ›› Issue (10): 1210-1218.doi: 10.16183/j.cnki.jsjtu.2020.182
Special Issue: 《上海交通大学学报》2021年“交通运输工程”专题; 《上海交通大学学报》2021年12期专题汇总专辑
Previous Articles Next Articles
LIU Wentong, CHEN Li( ), CHEN Jun
), CHEN Jun
Received:2020-06-15
Online:2021-10-28
Published:2021-11-01
Contact:
CHEN Li
E-mail:li.h.chen@sjtu.edu.cn
CLC Number:
LIU Wentong, CHEN Li, CHEN Jun. Adaptive Internal Model Control for Automotive Steer-by-Wire System with Time Delay[J]. Journal of Shanghai Jiao Tong University, 2021, 55(10): 1210-1218.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2020.182

Fig.1
Physical model of steering execution system
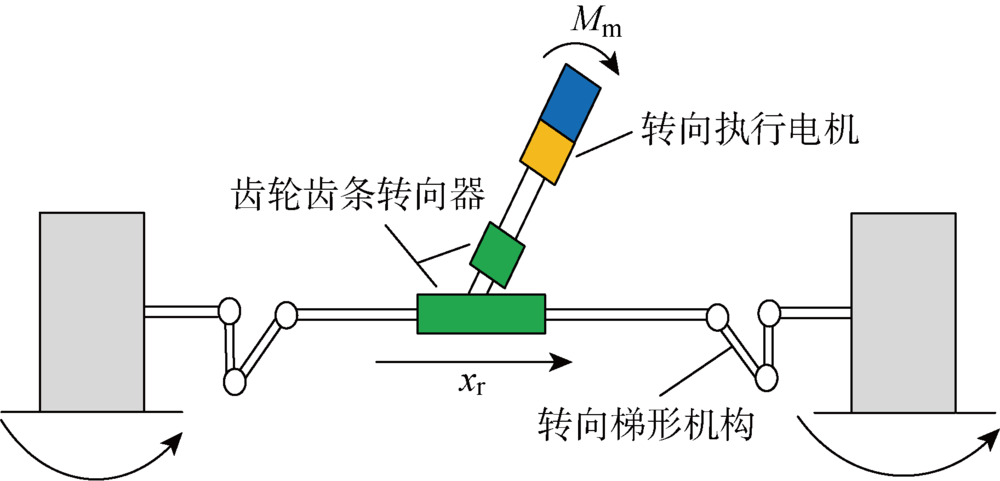

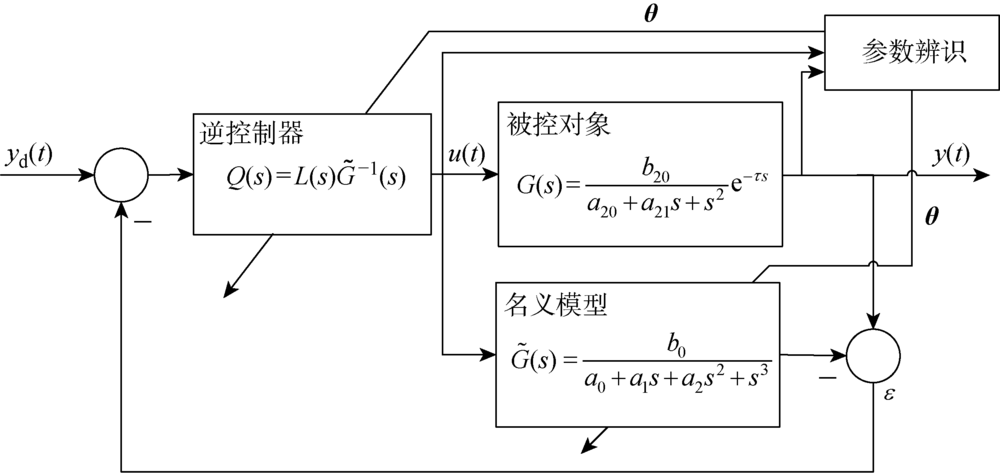
Fig.2
Block diagram of adaptive internal model control
Tab.1
Parameters of simulation setting
| 参数 | 取值 | 参数 | 取值 |
|---|---|---|---|
| a20 | 0.1309 | a21 | 32.87 |
| b20 | 1107 | R1 | |
| P0 | | R2 | 1 |
| λ | 10 | λ1 | 10 |
| n | 3 | Δt/ms | 1 |

Fig.3
Simulation results at τ=50 ms
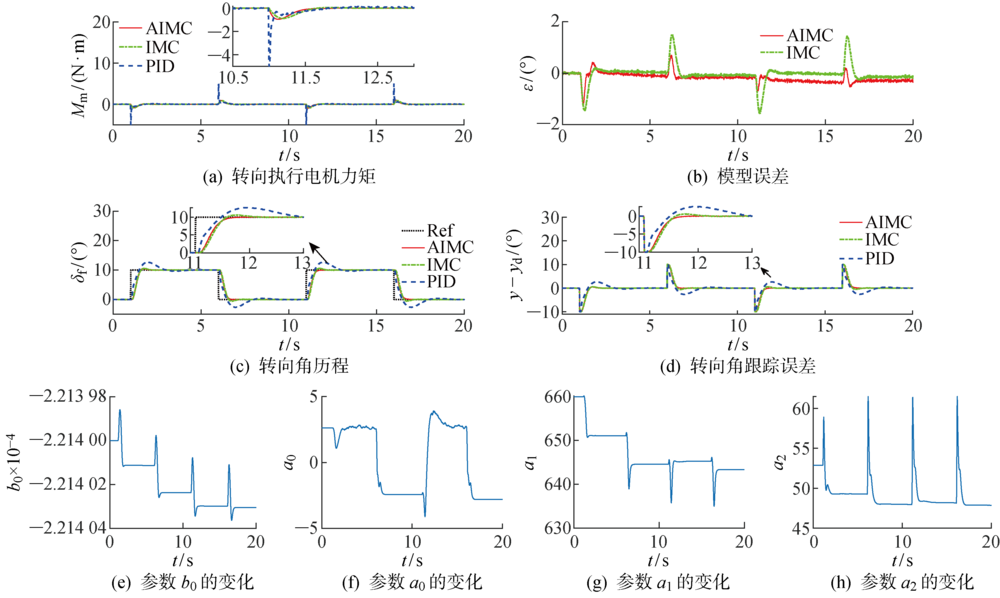

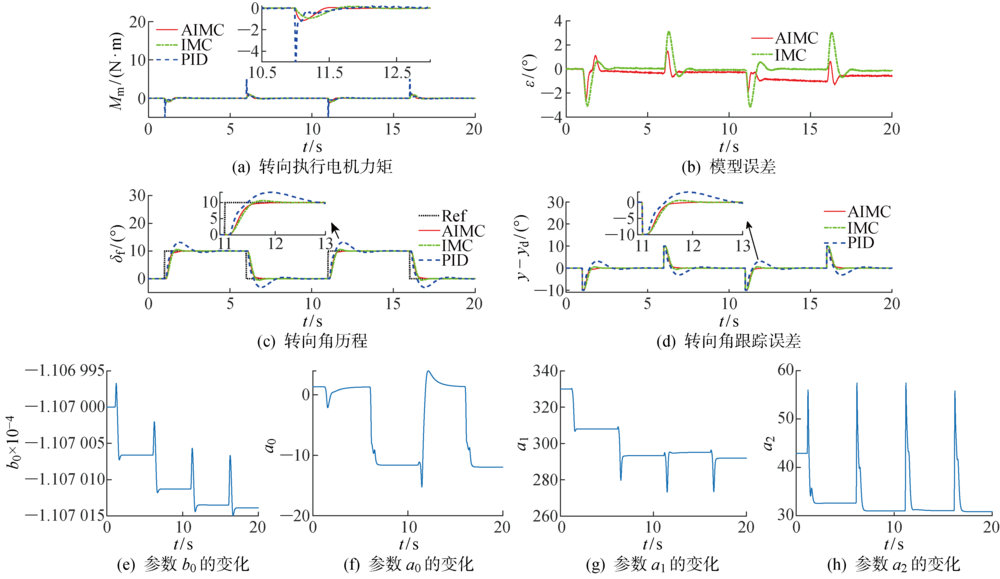
Fig.4
Simulation results at τ=100 ms
Tab.2
Simulation results
| τ/ms | 控制算法 | t1/s | t2/s | ω/(°) |
|---|---|---|---|---|
| 50 | AIMC | 0.85 | 1.06 | 0 |
| IMC | 0.58 | 1.33 | 0.535 | |
| PID | 0.48 | 3.63 | 2.694 | |
| 100 | AIMC | 0.64 | 1.24 | 0.011 |
| IMC | 0.55 | 1.80 | 1.715 | |
| PID | 0.45 | 4.88 | 3.167 |
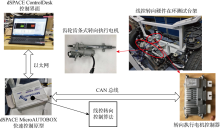
Fig.5
Steer-by-wire test bench
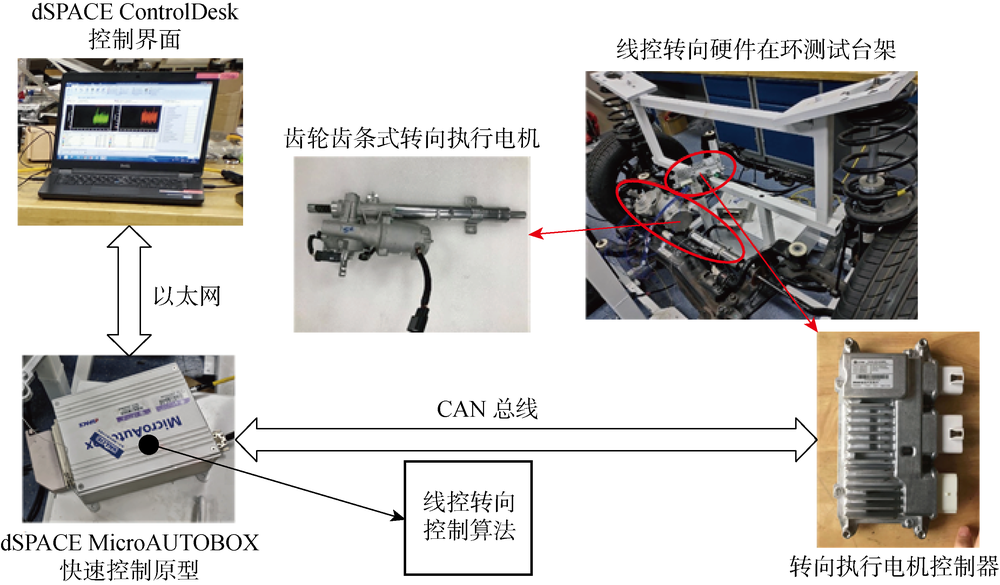

Fig.6
Bench test results at τ=0 ms
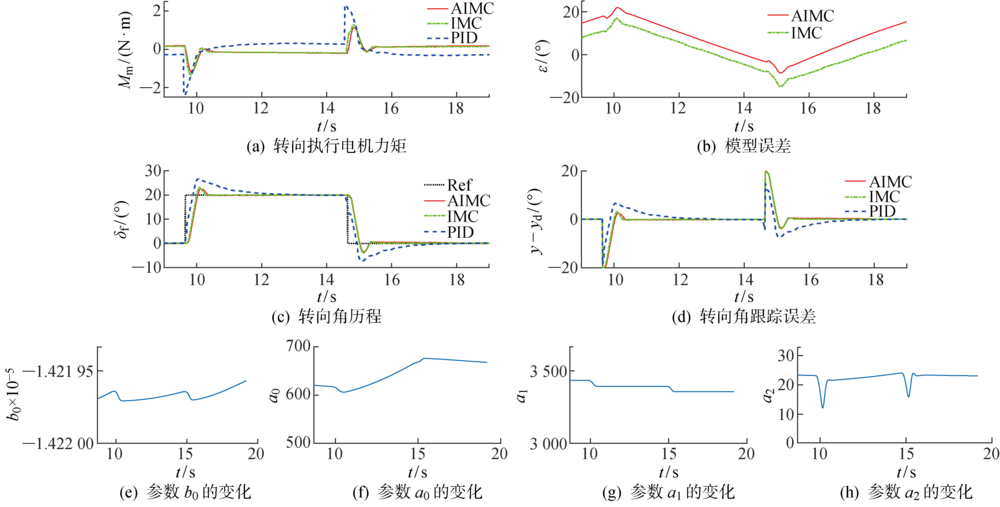

Fig.7
Bench test results at τ=100 ms
Tab.3
Test results
| τ/ms | 控制算法 | t1/s | t2/s | ω/(°) |
|---|---|---|---|---|
| 0 | AIMC | 0.44 | 0.77 | 0.658 |
| IMC | 0.43 | 0.84 | 1.241 | |
| PID | 0.30 | 4.60 | 2.123 | |
| 100 | AIMC | 0.45 | 1.21 | 1.487 |
| IMC | 0.42 | ∞ | 8.941 | |
| PID | 0.34 | 4.95 | 10.172 |
| [1] | 季学武, 刘亚辉, 杨恺明, 等. 乘用车电控转向系统的发展趋势[J]. 汽车安全与节能学报, 2015, 6(3):208-216. |
| JI Xuewu, LIU Yahui, YANG Kaiming, et al. Trend of passenger car steering system with electronic control[J]. Journal of Automotive Safety and Energy, 2015, 6(3):208-216. | |
| [2] | 陈俐, 李雄, 程小宣, 等. 汽车线控转向系统研究进展综述[J]. 汽车技术, 2018(4):23-34. |
| CHEN Li, LI Xiong, CHENG Xiaoxuan, et al. Review on research progress of automobile steer-by-wire system[J]. Automobile Technology, 2018(4):23-34. | |
| [3] | 蔡国平, 陈龙祥. 时滞反馈控制及其实验[M]. 北京: 科学出版社, 2017. |
| CAI Guoping, CHEN Longxiang. Delayed feedback control and experiments[M]. Beijing: Science Press, 2017. | |
| [4] | ZHANG L J, WANG L F, LIAO C L. Reliability research for steer-by-wire system of electric vehicle[C]// 2009 Asia-Pacific Power and Energy Engineering Conference. Wuhan, China: IEEE, 2009: 10662527. |
| [5] | ZHAO L, PING P W. A stability and tansparency analysis of steer-by-wire system based on the bilateral control and dual-port network theory[C]// 2010 International Conference on Electrical and Control Engineering. Wuhan, China: IEEE, 2010: 11647898. |
| [6] | ZAKARIA M L, HUSAIN A R, MOHAMED Z, et al. Lyapunov-Krasovskii stability condition for system with bounded delay—An application to steer-by-wire system[C]// 2015 IEEE International Conference on Control System, Computing and Engineering (ICCSCE). George Town, Malaysia: IEEE, 2015: 16052538. |
| [7] | HUANG C, DU H P, NAGHDY F, et al. Robust fuzzy tracking control of uncertain steer-by-wire systems with network time delays[C]// 2015 Australasian Universities Power Engineering Conference (AUPEC). Wollongong, NSW, Australia: IEEE, 2015: 15588282. |
| [8] | LAVRETSKY E, WISE K A. Robust adaptive control[M]. London, UK: Springer, 2013. |
| [9] | KARNIK A Y, JANKOVIC M. IMC based wastegate control using a first order model for turbocharged gasoline engine[C]// 2012 American Control Conference (ACC). Montreal, QC, Canada: IEEE, 2012: 13036112. |
| [10] | 温馨, 石红瑞. 积分过程的二自由度PID控制及应用[J]. 控制工程, 2013, 20(Sup.1):206-208. |
| WEN Xin, SHI Hongrui. Two degree of freedom PID control for integral processes and its application[J]. Control Engineering of China, 2013, 20(Sup.1):206-208. | |
| [11] | XU L, GE S Q, GUO J Y. Application of self-adaptive TDF-IMC in grinding classification process[C]// 2018 Chinese Control and Decision Conference (CCDC). Shenyang, China: IEEE, 2018: 17914530. |
| [12] | BEDOUI S, ABDERRAHIM K. ARMAX time delay systems identification based on least square approach[J]. IFAC-PapersOnLine, 2015, 48(28):1100-1105. |
| [13] |
LIN Q, LOXTON R, XU C, et al. Parameter estimation for nonlinear time-delay systems with noisy output measurements[J]. Automatica, 2015, 60:48-56.
doi: 10.1016/j.automatica.2015.06.028 URL |
| [14] |
LIU T, WANG Q G, HUANG H P. A tutorial review on process identification from step or relay feedback test[J]. Journal of Process Control, 2013, 23(10):1597-1623.
doi: 10.1016/j.jprocont.2013.08.003 URL |
| [15] |
LI L J, DONG T T, ZHANG S, et al. Time-delay identification in dynamic processes with disturbance via correlation analysis[J]. Control Engineering Practice, 2017, 62:92-101.
doi: 10.1016/j.conengprac.2017.03.007 URL |
| [16] | 邹村, 王爽心, 杨志远. 基于时变时滞系统自适应内模控制研究[J]. 自动化与仪器仪表, 1997(3):10-12. |
| ZOU Cun, WANG Shuangxin, YANG Zhiyuan. An adaptive internal model control(IMC) for time varying delay system[J]. Automation and Instrumentation, 1997(3):10-12. | |
| [17] | 贾立, 杨智. 基于神经网络的时变时滞系统自适应内模控制[J]. 甘肃工业大学学报, 2000, 26(1):69-75. |
| JIA Li, YANG Zhi. Adaptive internal model control based on neural network for time varying delay systems[J]. Journal of Gansu University of Technology, 2000, 26(1):69-75. | |
| [18] |
KUMAR D B S, PADMA SREE R. Tuning of IMC based PID controllers for integrating systems with time delay[J]. ISA Transactions, 2016, 63:242-255.
doi: 10.1016/j.isatra.2016.03.020 URL |
| [19] |
MURESAN C I, DUTTA A, DULF E H, et al. Tuning algorithms for fractional order internal model controllers for time delay processes[J]. International Journal of Control, 2016, 89(3):579-593.
doi: 10.1080/00207179.2015.1086027 URL |
| [20] | 叶政. PID控制器参数整定方法研究及其应用[D]. 北京: 北京邮电大学, 2016. |
| YE Zheng. PID controller parameter tuning method and application[D]. Beijing: Beijing University of Posts and Telecommunications, 2016. | |
| [21] | HAYKIN S. Kalman filtering and neural networks[M]. New York, USA: John Wiley & Sons, 2001. |
| [22] |
WANG H, MAN Z H, KONG H F, et al. Design and implementation of adaptive terminal sliding-mode control on a steer-by-wire equipped road vehicle[J]. IEEE Transactions on Industrial Electronics, 2016, 63(9):5774-5785.
doi: 10.1109/TIE.41 URL |
| [23] | 杨翔宇, 吕世明, 李楠, 等. 汽车转向系统回正力矩模型的比较及仿真研究[J]. 机械设计与制造, 2016(2):258-262. |
| YANG Xiangyu, LV Shiming, LI Nan, et al. Comparison and simulation of aligning torque models of vehicle steering system[J]. Machinery Design & Manufacture, 2016(2):258-262. | |
| [24] | 郑宏宇, 宗长富, 王祥. 汽车线控转向系统路感模拟方法[J]. 农业机械学报, 2011, 42(2):18-22. |
| ZHENG Hongyu, ZONG Changfu, WANG Xiang. Road feel design for vehicle steer-by-wire system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(2):18-22. | |
| [25] |
QIU Z, SANTILLO M, JANKOVIC M, et al. Composite adaptive internal model control and its application to boost pressure control of a turbocharged gasoline engine[J]. IEEE Transactions on Control Systems Technology, 2015, 23(6):2306-2315.
doi: 10.1109/TCST.2015.2414400 URL |
| [1] | LI Shuang, SHI Jianqiang. An LC Inverter Based on Novel Dual-Loop Control [J]. Journal of Shanghai Jiao Tong University, 2022, 56(9): 1139-1147. |
| [2] | OUYANG Xuyu, CHANG Haichao, LIU Zuyuan, FENG Baiwei, ZHAN Chengsheng, CHENG Xide. Application of Adaptive Sampling Method in Hull Form Optimization [J]. Journal of Shanghai Jiao Tong University, 2022, 56(7): 937-943. |
| [3] | LI Jinjiang, XIANG Xianbo, LIU Chuan, YANG Shaolong. Robust Seabed Terrain Following Control of Underactuated AUV with Prescribed Performance Guidance Law Under Time Delay of Actuator [J]. Journal of Shanghai Jiao Tong University, 2022, 56(7): 944-952. |
| [4] | LI Yuanfeng (李元丰), WANG Yiling (王怡灵), ZHANG Wanxin∗ (张万欣), LIU Jinian (刘冀念), MA Jialu (马加炉). Sealing Performance of Pressure-Adaptive Seal [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(6): 747-756. |
| [5] | YUAN Dongdong (袁冬冬), WANG Yankai∗ (王彦恺). Data Driven Model-Free Adaptive Control Method for Quadrotor Trajectory Tracking Based on Improved Sliding Mode Algorithm [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(6): 790-798. |
| [6] | DING Ming, MENG Shuai, WANG Shuheng, XIA Xi. Neural-Network-Based Adaptive Feedback Linearization Control for 6-DOF Wave Compensation Platform [J]. Journal of Shanghai Jiao Tong University, 2022, 56(2): 165-172. |
| [7] | TANG Hongtao, WANG Dannan, SHAO Yiping, ZHAO Wenbin, JIANG Weiguang, CHEN Qingfeng. A Modified Migrating Birds Optimization for Multi-Objective Lot Streaming Hybrid Flowshop Scheduling [J]. Journal of Shanghai Jiao Tong University, 2022, 56(2): 201-213. |
| [8] | ZHANG Wenjia, MA Xin. A Sliding Window Adaptive Filtering Algorithm for Autonomous Navigation of the Approach Phase of Deep Space Probe [J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1461-1469. |
| [9] | ZHOU Qixian, WANG Yin, SUN Xuean. Control of Unmanned Aerial Vehicle Based on Gain Adaptive Super-Twisting Sliding Mode Theory [J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1453-1460. |
| [10] | FANG Ming, ZHAO Chanjuan, ZHAO Chunlei, XU Anqi, CHEN Jian. Research on Clutter Suppression Technique for Marching Vehicle-borne Radar Based on STAP [J]. Air & Space Defense, 2022, 5(1): 71-77. |
| [11] | GU Nianzu, TAO Qingchang, XING Fei, Sun Xin, WU Zhilin, YOU Zheng. GNSS Anti-Spoofing Technology Based on ESPRIT and GS-SMI Algorithm [J]. Air & Space Defense, 2022, 5(1): 78-85. |
| [12] | JIN Haochun, GE Minhui, XU Bo. Optimization of DFIG Comprehensive Adaptive Frequency Regulation Parameters Based on Extreme Learning Machine [J]. Journal of Shanghai Jiao Tong University, 2021, 55(S2): 42-50. |
| [13] | ZHANG Junning, SU Qunxing, WANG Cheng, XU Chao, LI Yining. A Domain Adaptive Semantic Segmentation Network Based on Improved Transformation Network [J]. Journal of Shanghai Jiao Tong University, 2021, 55(9): 1158-1168. |
| [14] | WANG Weiyang (王维旸), CUI Ke (崔 科), GU Lizhong(顾立忠), LU¨ Xinjun (吕新军). Cooperative Adaptive Cruise Control Using Delay-Based Spacing Policy: A Robust Adaptive Non-Singular Terminal Sliding Mode Approach [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(5): 634-646. |
| [15] | SHI Qiang (师 强), ZHANG Jianlin (张建林), YANG Ming∗ (杨 明). Curvature Adaptive Control Based Path Following for Automatic Driving Vehicles in Private Area [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(5): 690-698. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||