Journal of Shanghai Jiao Tong University ›› 2022, Vol. 56 ›› Issue (11): 1453-1460.doi: 10.16183/j.cnki.jsjtu.2022.238
• Guidance, Navigation and Control • Previous Articles Next Articles
ZHOU Qixian, WANG Yin( ), SUN Xuean
), SUN Xuean
Received:2022-06-27
Online:2022-11-28
Published:2022-12-02
Contact:
WANG Yin
E-mail:yinwangee@nuaa.edu.cn
CLC Number:
ZHOU Qixian, WANG Yin, SUN Xuean. Control of Unmanned Aerial Vehicle Based on Gain Adaptive Super-Twisting Sliding Mode Theory[J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1453-1460.
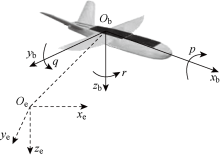
Fig.1
Diagram of referential frames configuration of UAV
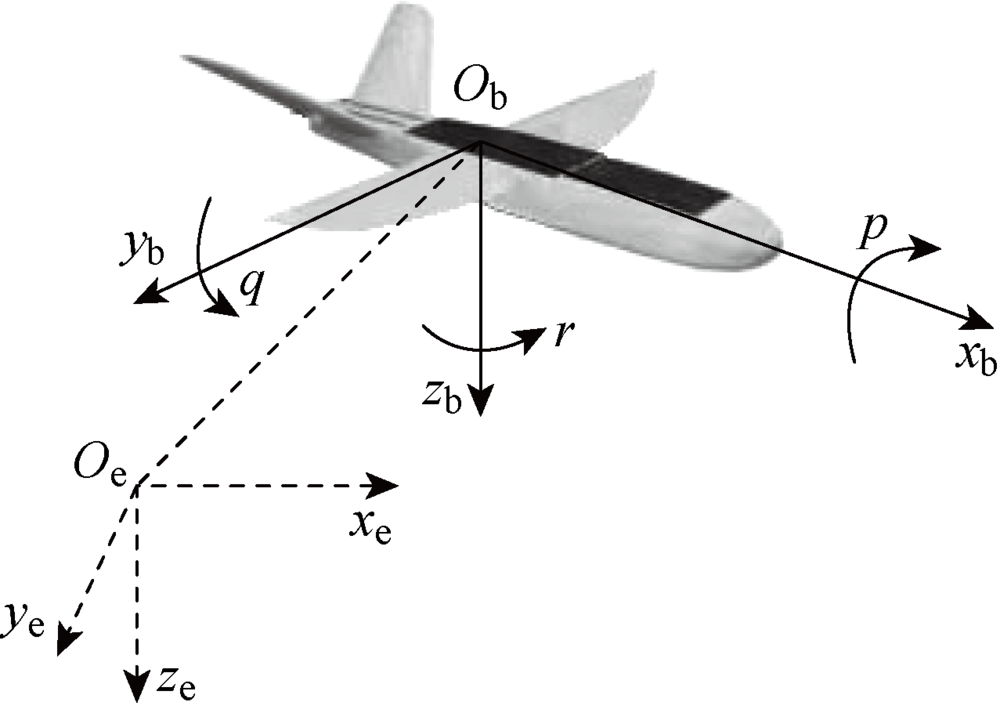
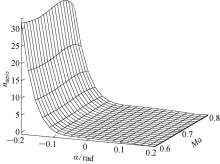
Fig.2
Aerodynamic pitching moment coefficient

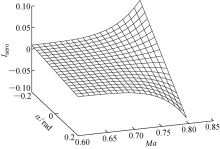
Fig.3
Aerodynamic rolling moment coefficient
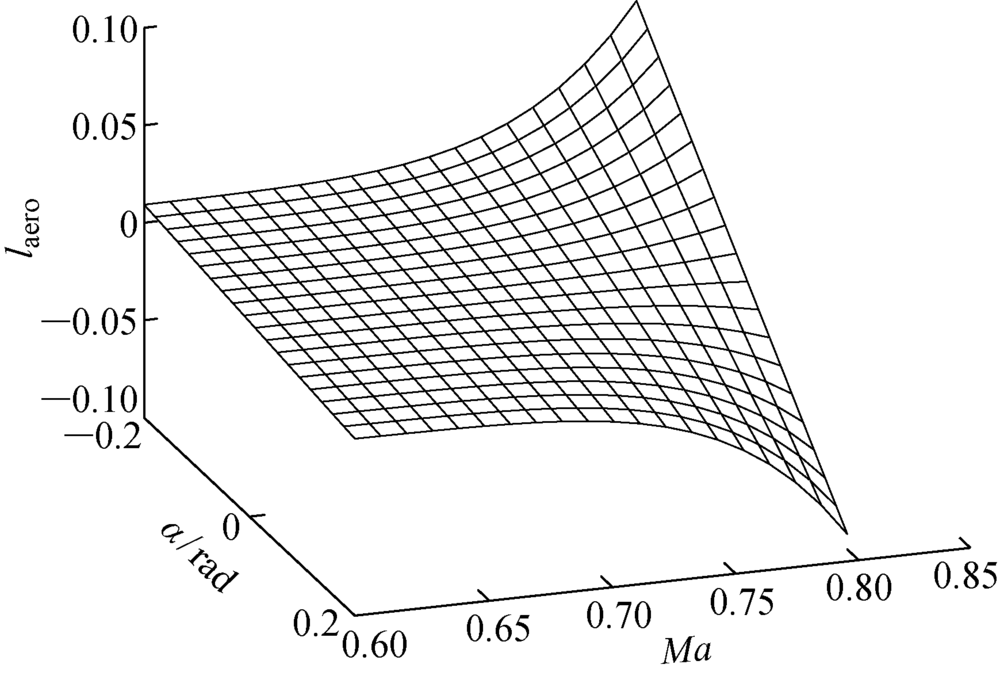

Fig.4
Control pitching moment coefficient
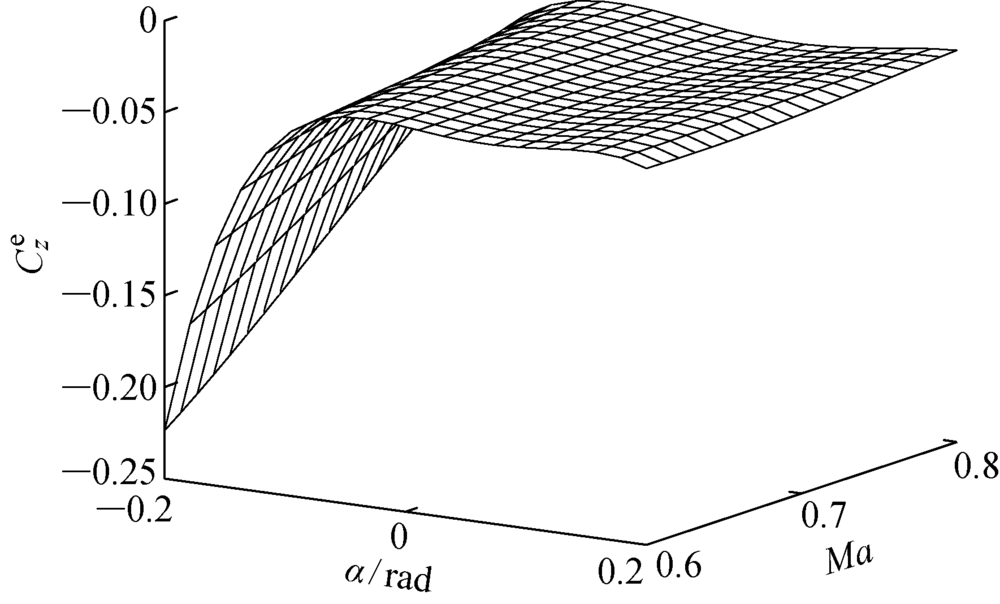

Fig.5
Control roll moment coefficient
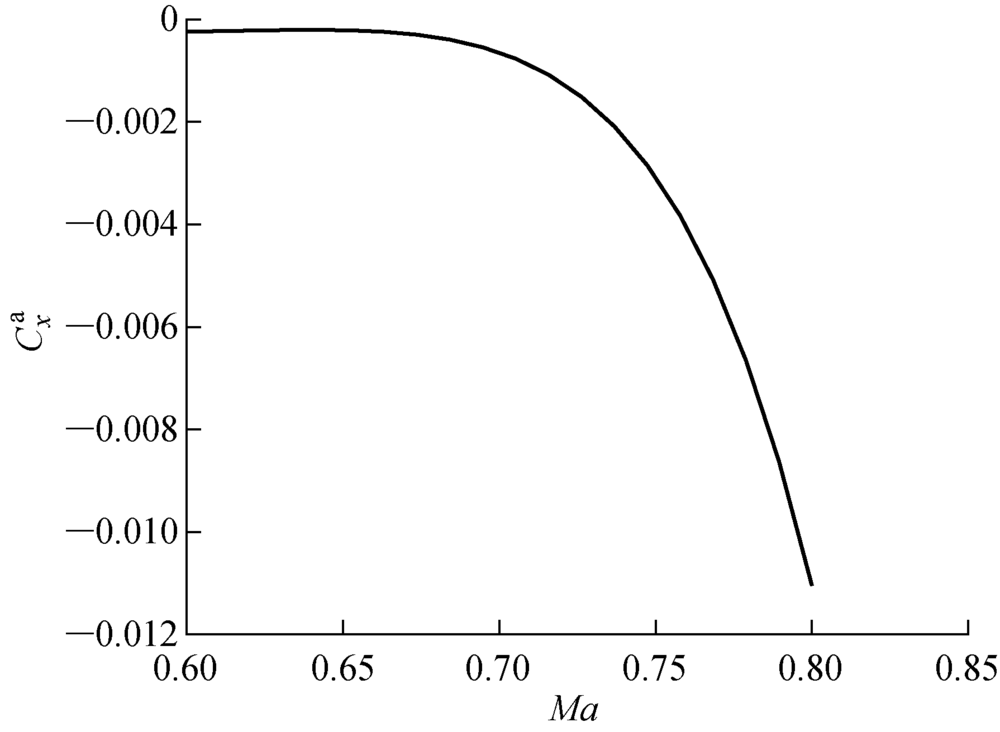
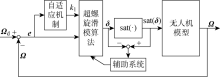
Fig.6
UAV attitude control diagram
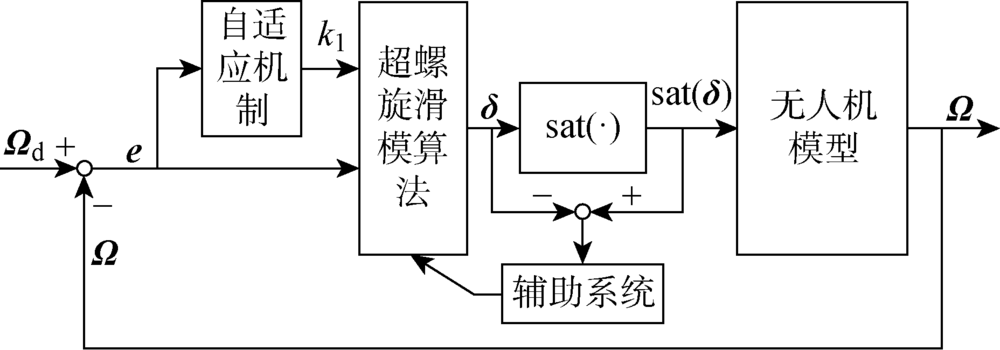
Fig.7
Changing curve of adaptive-gain of controller
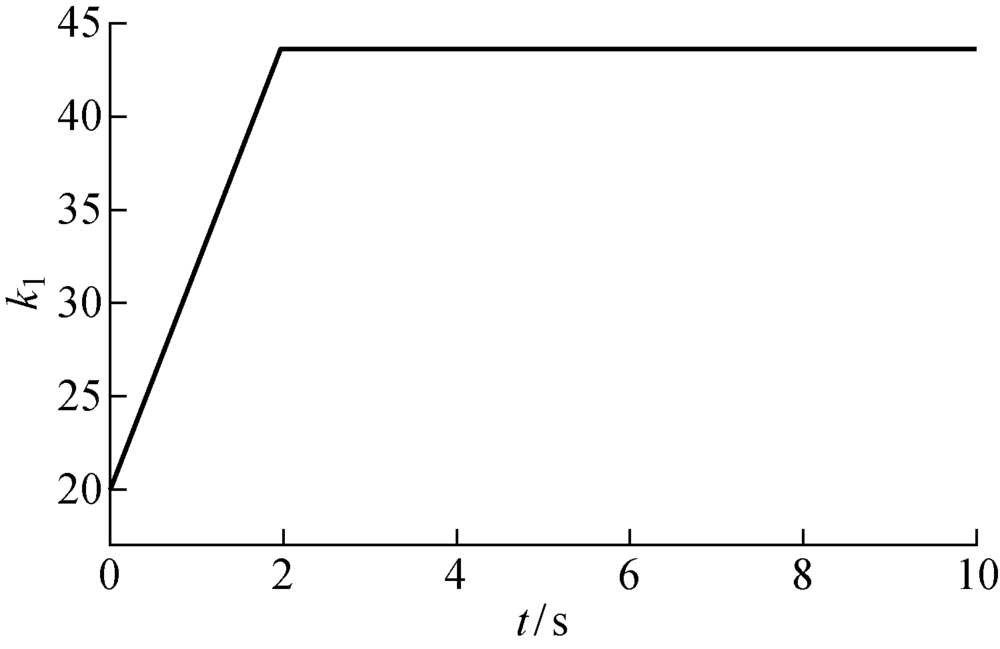

Fig.8
Error curves of attitude angle by ASTSM
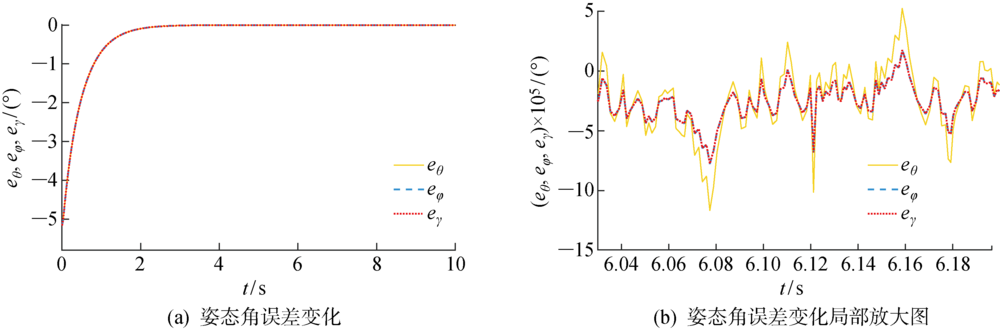
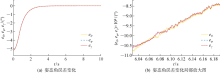
Fig.9
Errors curves of attitude angle by ASTSM
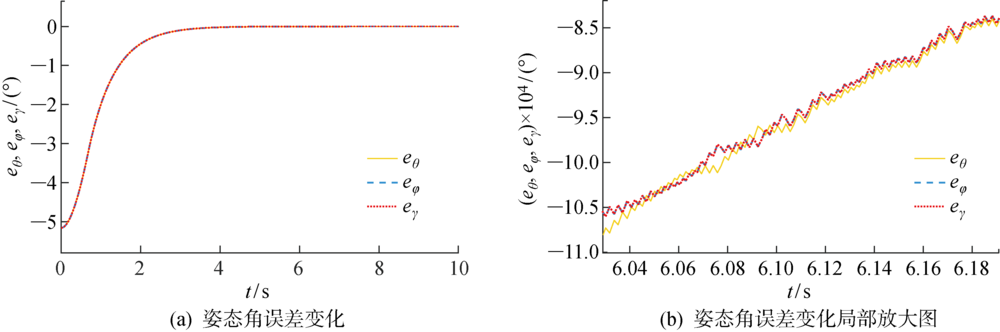
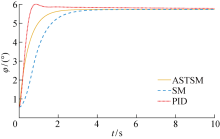
Fig.10
Tracking curves of yaw angles
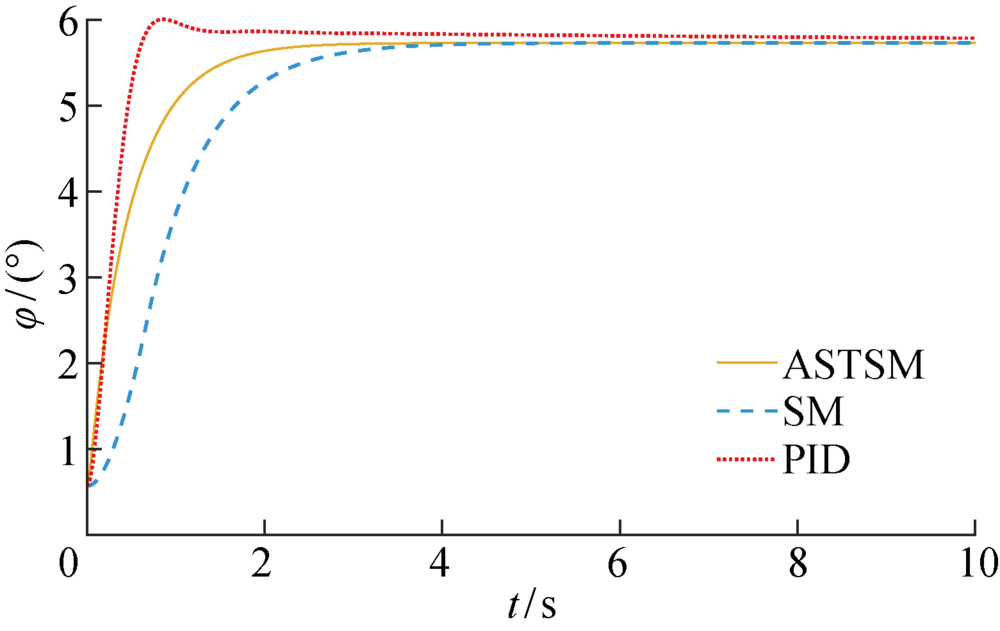
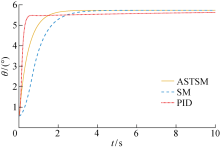
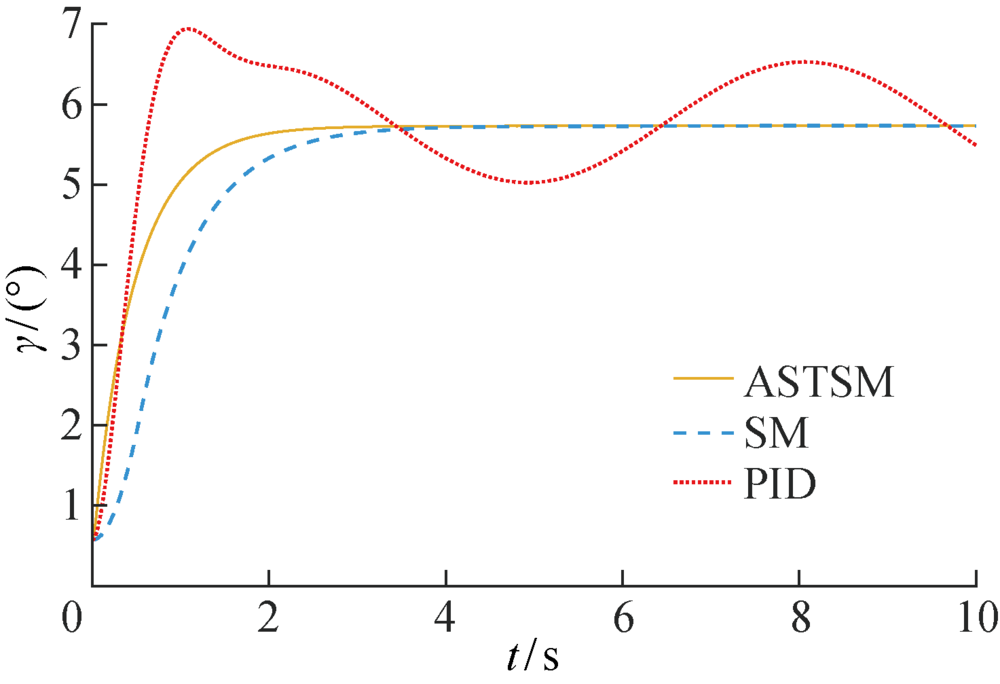
Fig.11
Tracking curves of pitch angles
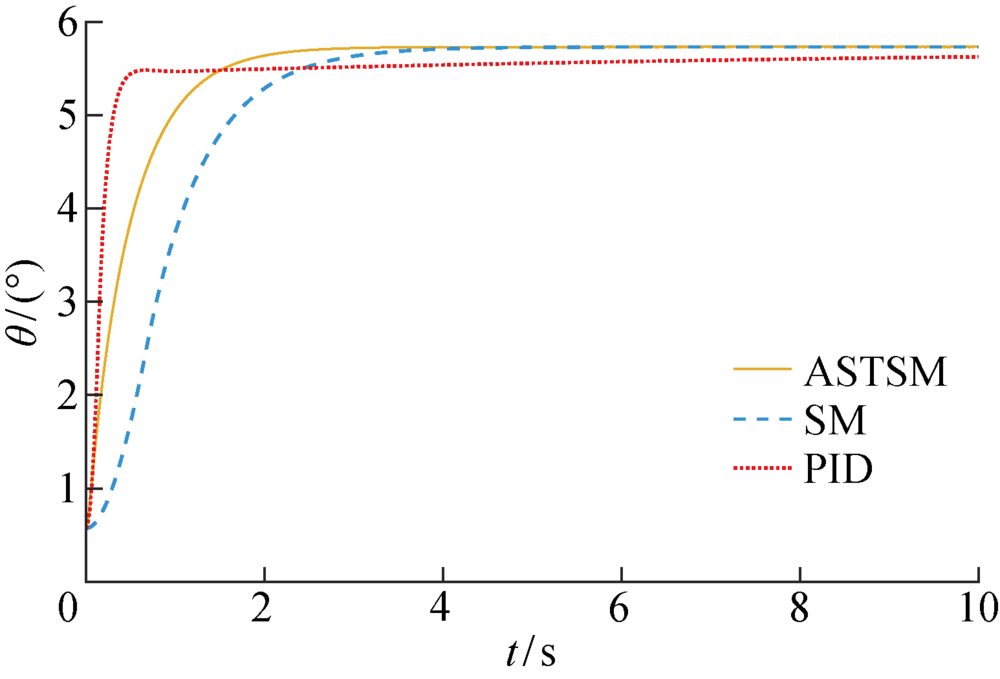
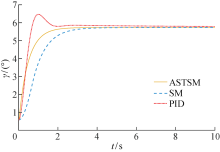
Fig.12
Tracking curves of roll angles
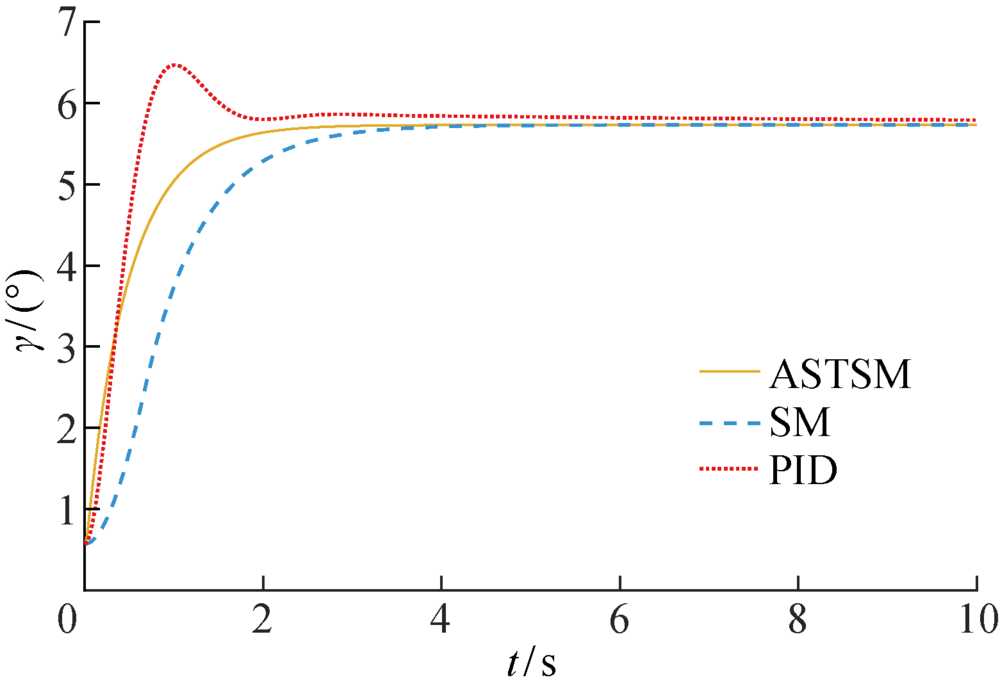

Fig.13
Tracking curves of yaw angles with disturbance
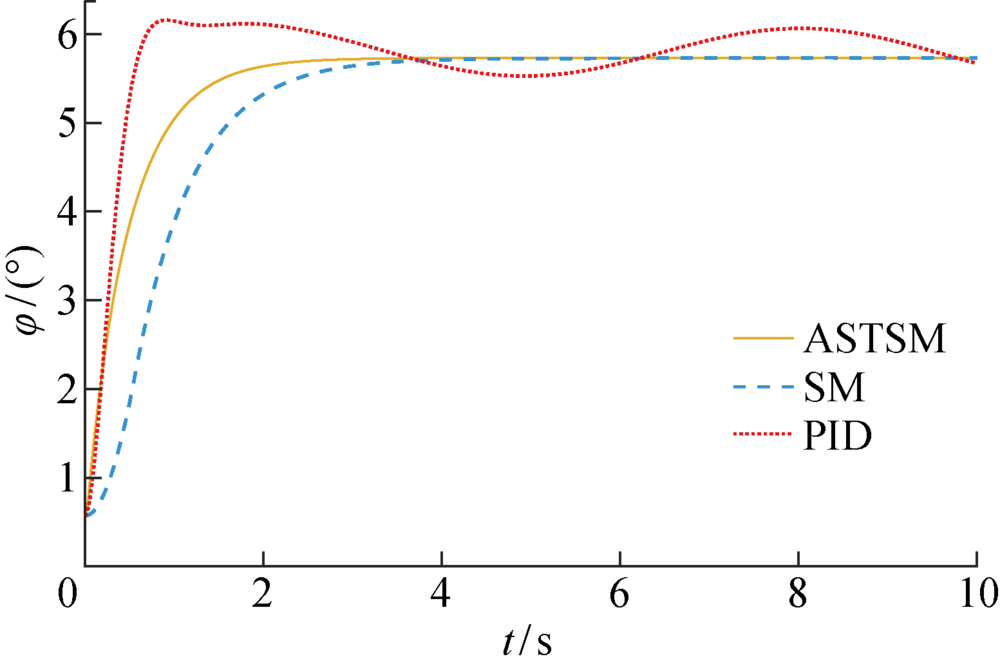
Fig.14
Tracking curves of pitch angles with disturbance
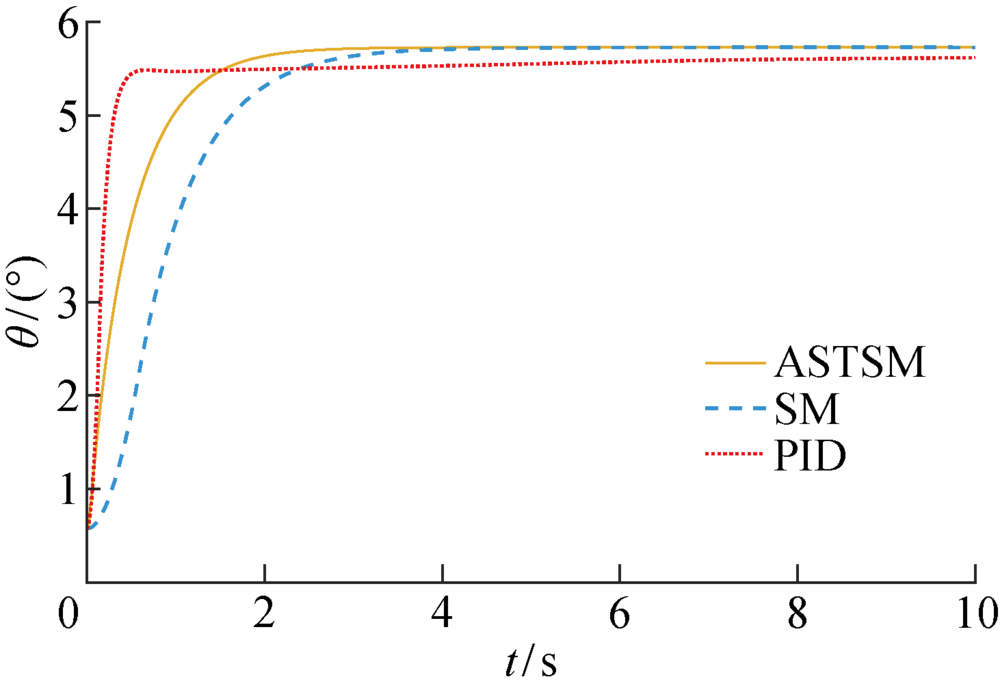
Fig.15
Tracking curves of roll angles with disturbance
| [1] | 王家琪, 郭建国, 郭宗易, 等. 基于干扰观测器的高马赫数飞行器滑模控制[J]. 空天防御, 2021, 4(3): 85-91. |
| WANG Jiaqi, GUO Jianguo, GUO Zongyi, et al. Sliding mode control of high Mach number aircraft based on disturbance observer[J]. Air & Space Defense, 2021, 4(3): 85-91. | |
| [2] | 黄金杰, 宫煜晴, 郝现志. 平稳切换LPV系统的H∞控制器设计[J]. 控制与决策, 2022, 37(5): 1167-1173. |
| HUANG Jinjie, GONG Yuqing, HAO Xianzhi. Design of H∞ controller for smooth switching LPV systems[J]. Control and Decision, 2022, 37(5): 1167-1173. | |
| [3] | 孙冰, 陈伟. 抗控制饱和的鲁棒非线性飞行控制方法[J]. 北京航空航天大学学报, 2021, 47(12): 2475-2483. |
| SUN Bing, CHEN Wei. Robust nonlinear flight control method against control saturation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(12): 2475-2483. | |
| [4] | 刘志豪, 闵荣, 方成, 等. 多飞行模式垂直起降无人机过渡飞行控制策略[J]. 上海交通大学学报, 2019, 53(10): 1173-1181. |
| LIU Zhihao, MIN Rong, FANG Cheng, et al. Transition flight control strategy of multiple flight mode vertical take-off and landing unmanned aerial vehicle[J]. Journal of Shanghai Jiao Tong University, 2019, 53(10): 1173-1181. | |
| [5] | HUANG X, LUO W Y, LIU J R. Attitude control of fixed-wing UAV based on DDQN[C]∥2019 Chinese Automation Congress. Hangzhou, China: IEEE, 2019: 4722-4726. |
| [6] | ZHI Y F, LI G S, SONG Q, et al. Flight control law of unmanned aerial vehicles based on robust servo linear quadratic regulator and Kalman filtering[J]. International Journal of Advanced Robotic Systems, 2017, 14(1): 1-11 |
| [7] | HIRANO S, UCHIYAMA K, MASUDA K. Controller design using backstepping algorithm for fixed-wing UAV with thrust vectoring system[C]∥2019 International Conference on Unmanned Aircraft Systems. Atlanta, GA, USA: IEEE, 2019: 1084-1088. |
| [8] | DE OLIVEIRA H A, ROSA P F F. Adaptive genetic neuro-fuzzy attitude control for a fixed wing UAV[C]∥2017 IEEE International Conference on Industrial Technology. Toronto, ON, Canada: IEEE, 2017: 726-731. |
| [9] | SWARNKAR S, KOTHARI M. A simplified adaptive backstepping control of aircraft lateral/directional dynamics[J]. IFAC-PapersOnLine, 2016, 49(1): 579-584. |
| [10] | DUAN G R. Missile attitude control-A direct parametric approach[C]∥The 33rd Chinese Control Conference, Nanjing, China: TCCT, 2014: 2414-2421. |
| [11] | 张显库, 韩旭. 大型油轮艏摇混沌现象的仿真与滑模控制[J]. 上海交通大学学报, 2021, 55(1): 40-47. |
| ZHANG Xianku, HAN Xu. Modeling and sliding mode control for chaotic yawing phenomenon of large oil tanker[J]. Journal of Shanghai Jiao Tong University, 2021, 55(1): 40-47. | |
| [12] | 姚来鹏, 侯保林, 刘曦. 采用摩擦补偿的弹药传输机械臂自适应终端滑模控制[J]. 上海交通大学学报, 2020, 54(2): 144-151. |
| YAO Laipeng, HOU Baolin, LIU Xi. Adaptive terminal sliding mode control of a howitzer shell transfer arm with friction compensation[J]. Journal of Shanghai Jiao Tong University, 2020, 54(2): 144-151. | |
| [13] | 张超凡, 董琦. 考虑输入饱和的固定翼无人机自适应增益滑模控制[J]. 航空学报, 2020, 41(Sup.1): 79-87. |
| ZHANG Chaofan, DONG Qi. Adaptive-gain sliding mode control for fixed-wing UAVs with input saturation[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(Sup.1): 79-87. | |
| [14] |
DONG Q, ZONG Q, TIAN B L, et al. Adaptive-gain multivariable super-twisting sliding mode control for reentry RLV with torque perturbation[J]. International Journal of Robust and Nonlinear Control, 2017, 27(4): 620-638.
doi: 10.1002/rnc.3589 URL |
| [15] |
HU Q, LI B, QI J. Disturbance observer based finite-time attitude control for rigid spacecraft under input saturation[J]. Aerospace Science and Technology, 2014, 39: 13-21.
doi: 10.1016/j.ast.2014.08.009 URL |
| [16] | SHTESSEL Y B, MORENO J A, FRIDMAN L M. Twisting sliding mode control with adaptation: Lyapunov design, methodology and application[J]. Automatica, 2017(75): 229-235. |
| [1] | HUANG Yuhao, HAN Chao, ZHAO Minghui, DU Qiankun, WANG Shigang. Multi-Objective Optimization Strategy of Trajectory Planning for Unmanned Aerial Vehicles Considering Constraints of Safe Flight Corridors [J]. Journal of Shanghai Jiao Tong University, 2022, 56(8): 1024-1033. |
| [2] | LI Dengpan, REN Xiaoming, YAN Nannan. Real-Time Detection of Insulator Drop String Based on UAV Aerial Photography [J]. Journal of Shanghai Jiao Tong University, 2022, 56(8): 994-1003. |
| [3] | YUAN Dongdong (袁冬冬), WANG Yankai∗ (王彦恺), BAI Jiaqi (白嘉琪). Multi-UAV Route Re-Generation Method Based on Trajectory Data [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(6): 806-816. |
| [4] | GUO Pengjun, ZHANG Rui, GAO Guangen, XU Bin. Cooperative Navigation of UAV Formation Based on Relative Velocity and Position Assistance [J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1438-1446. |
| [5] | JIN Yudong (靳宇栋), FENG Jiabo (冯家波), ZHANG Weijun (张伟军). UAV Task Allocation for Hierarchical Multiobjective Optimization in Complex Conditions Using Modified NSGA-III with Segmented Encoding [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(4): 431-445. |
| [6] | YAO Tiancheng, ZHAO Yongsheng, WANG Hongyu, HE Yanping, DING Zilong, CHI Zheying, CAI Weikai. Development of a Hybrid Solar and Wind-Powered Long-Range Unmanned Ocean Stereo Exploration Vessel [J]. Journal of Shanghai Jiao Tong University, 2021, 55(2): 215-220. |
| [7] | LI Zheng, CHEN Jianwei, PENG Bo . UAV Cluster Path Planning Based on Pseudo-spectral Method [J]. Air & Space Defense, 2021, 4(1): 52-59. |
| [8] | MA Zhonghang, ZHANG Zhinan. Design and Realization of a Versatile Simulation Platform for Telecontrol Multi-Rotor Unmanned Aerial Vehicle with a Robotic Arm [J]. Journal of Shanghai Jiaotong University, 2020, 54(6): 636-642. |
| [9] | WU Xin (武星), PU Juan (蒲娟), XIE Shaorong (谢少荣) . Attacking Strategy of Multiple Unmanned Surface Vehicles with Improved GWO Algorithm Under Control of Unmanned Aerial Vehicles [J]. Journal of Shanghai Jiao Tong University (Science), 2020, 25(2): 201-207. |
| [10] | YANG Yudan,ZHU Bingjie,GUO Zheng,YANG Xixiang. The Sensitivity Analysis of Energy System Parameters of Solar Powered Unmanned Aerial Vehicle [J]. Journal of Shanghai Jiaotong University, 2020, 54(10): 1045-1052. |
| [11] | WANG Hongyu,YIN Wurong,WANG Liang,HU Jianghao,QIAO Wenchao. Fast Edge Extraction Algorithm Based on HSV Color Space [J]. Journal of Shanghai Jiaotong University, 2019, 53(7): 765-772. |
| [12] | LIU Zhihao,MIN Rong,FANG Cheng,YI Chao,LU Cunyue,MA Yixin. Transition Flight Control Strategy of Multiple Flight Mode Vertical Take-Off and Landing Unmanned Aerial Vehicle [J]. Journal of Shanghai Jiaotong University, 2019, 53(10): 1173-1181. |
| [13] | CHEN Zirong *(陈仔荣), LU Yafei (鲁亚飞), HOU Zhongxi (侯中喜), WANG Junwei (王俊伟). UAV's Coverage Search Planning Algorithm Based on Action Combinations [J]. Journal of Shanghai Jiao Tong University (Science), 2019, 24(1): 48-57. |
| [14] | YANG Qing (杨轻), YANG Zhong (杨忠), HU Guoxiong (胡国雄), DU Wei (杜威). A New Fusion Chemical Reaction Optimization Algorithm Based on Random Molecules for Multi-Rotor UAV Path Planning in Transmission Line Inspection [J]. Journal of Shanghai Jiao Tong University (Science), 2018, 23(5): 671-677. |
| [15] | Wang Zhe, Xu Lingfei, Gu Cunfeng. Simulation of Damage Effect of Laser Weapon System Against Composite Unmanned Aerial Vehicle [J]. Air & Space Defense, 2018, 1(1): 63-68. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 668
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 1011
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||