Journal of Shanghai Jiao Tong University ›› 2022, Vol. 56 ›› Issue (11): 1461-1469.doi: 10.16183/j.cnki.jsjtu.2022.233
Special Issue: 《上海交通大学学报》2022年“制导、导航与控制”专题; 制导、导航与控制
• Guidance, Navigation and Control • Previous Articles Next Articles
ZHANG Wenjia, MA Xin( )
)
Received:2022-06-21
Online:2022-11-28
Published:2022-12-02
Contact:
MA Xin
E-mail:maxin@buaa.edu.cn
CLC Number:
ZHANG Wenjia, MA Xin. A Sliding Window Adaptive Filtering Algorithm for Autonomous Navigation of the Approach Phase of Deep Space Probe[J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1461-1469.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2022.233
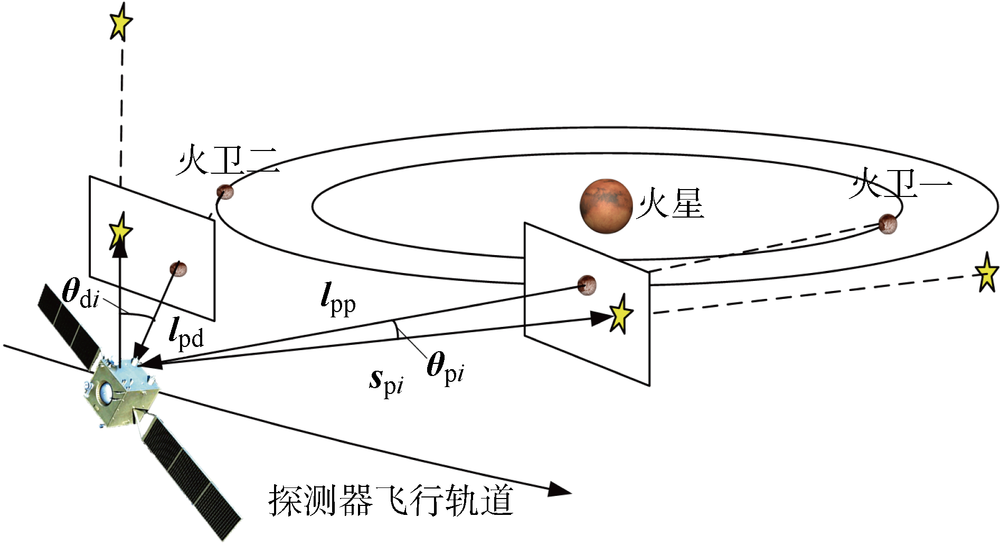
Fig.1
Angle between the star and Mars
Tab.1
Orbit parameters of Mars probe
| 参数 | 数值 |
|---|---|
| a'/km | 1.932×108 |
| e | 0.2364 |
| i'/(°) | 23.455 |
| 升交点赤经/(°) | 0.258 |
| 近地点角距/(°) | 71.347 |
| 真近角点/(°) | 85.152 |
| 接近火星时间 | 1997-01-04T17:03:13.000 |
Tab.2
Parameters of optical sensor
| 参数 | 数值 |
|---|---|
| f'/mm | 2 013.4 |
| FOV/mrad | 10×10 |
| R/(rad·像素-1) | 10 |
| CCD平面大小/像素 | 1024×1024 |
| 像素大小/m | 21 |

Fig.2
Results of UKF algorithm
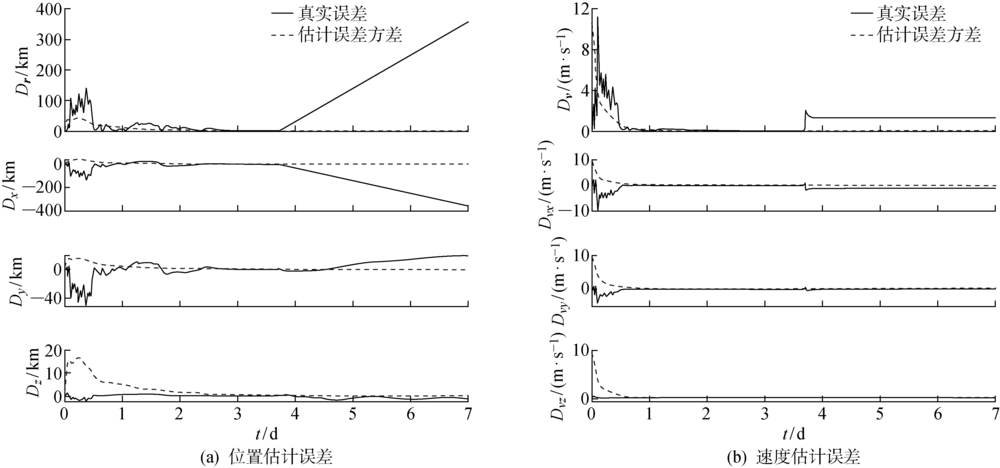

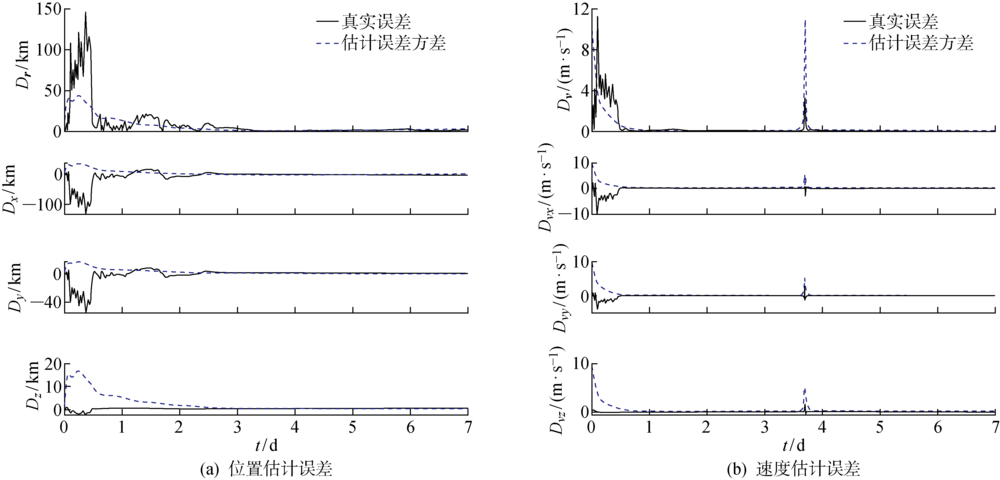
Fig.3
Results of AQUKF algorithm
Tab.3
Results of UKF and AQUKF filtering methods
| 滤波 方法 | 估计误差平均值 | 估计误差最大值 | |||
|---|---|---|---|---|---|
| 位置/km | 速度/ (m·s-1) | 位置/km | 速度/ (m·s-1) | ||
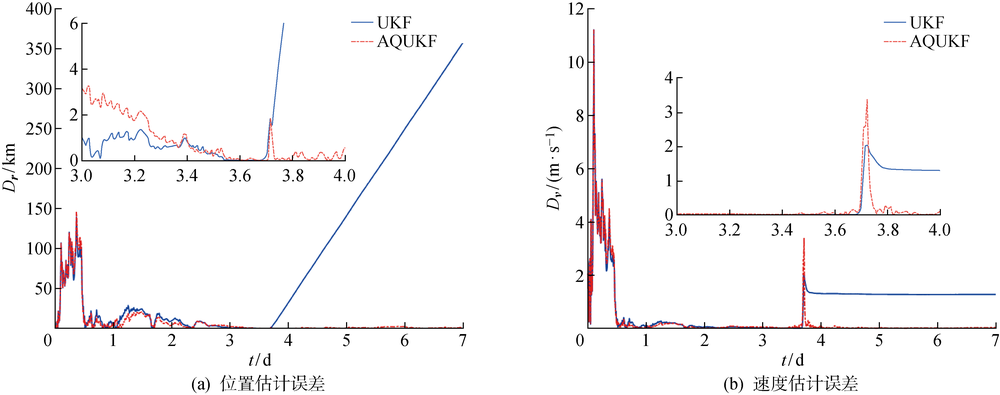
| UKF | 92.221 2 | 0.879 7 | 355.462 5 | 11.166 9 | |
| AQUKF | 8.323 4 | 0.297 6 | 146.019 5 | 11.173 0 | |

Fig.4
Comparison of estimation error between UKF algorithm and AQUKF algorithm
Tab.4
Influence of filtering period on accuracy of navigation algorithm
| T/s | 估计误差平均值 | 估计误差最大值 | |||
|---|---|---|---|---|---|
| 位置/km | 速度/(m·s-1) | 位置/km | 速度/(m·s-1) | ||
| 120 | 3.106 5 | 0.158 1 | 51.003 | 11.904 3 | |
| 300 | 4.103 0 | 0.167 8 | 78.635 | 12.492 3 | |
| 600 | 8.323 4 | 0.297 6 | 146.019 | 11.173 0 | |
| 900 | 7.797 1 | 0.280 2 | 102.540 | 9.872 7 | |
| 1 200 | 11.574 0 | 0.538 7 | 109.420 | 56.290 3 | |

Fig.5
Influence of filtering period on position error and velocity error
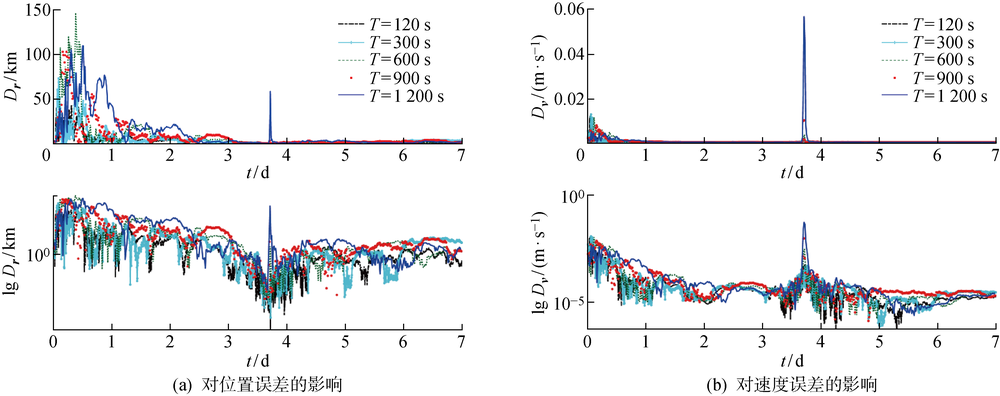

Fig.6
Influence of window size on position error and velocity error

Tab.5
Influence of window size on accuracy of navigation algorithm
| N | 估计误差平均值 | 估计误差最大值 | |||
|---|---|---|---|---|---|
| 位置/km | 速度/(m·s-1) | 位置/km | 速度/(m·s-1) | ||
| 1 | 8.572 8 | 0.316 1 | 150.67 | 11.197 3 | |
| 5 | 8.412 2 | 0.300 1 | 148.27 | 11.178 1 | |
| 10 | 8.323 4 | 0.297 6 | 146.02 | 11.173 0 | |
| 50 | 8.545 2 | 0.312 8 | 141.62 | 11.168 2 | |
| 100 | 8.850 2 | 0.312 7 | 140.63 | 11.167 5 | |
| 300 | 9.579 0 | 0.307 9 | 139.87 | 11.167 2 | |
| [1] | 吴伟仁, 王大轶, 宁晓琳. 深空探测器自主导航原理与技术[M]. 北京: 中国宇航出版社, 2011. |
| WU Weiren, WANG Dayi, NING Xiaolin. Principle and technology of autonomous navigation for deep-space probe[M]. Beijing: China Astronautic Publishing House, 2011. | |
| [2] | 房建成, 宁晓琳. 深空探测器自主天文导航方法[M]. 西安: 西北工业大学出版社, 2010. |
| FANG Jiancheng, NING Xiaolin. Autonomous celestial navigation method for a deep-space probe[M]. Xi’an: Northwestern Polytechnic University Press, 2010. | |
| [3] |
YU Z S, CUI P Y, CRASSIDIS J L. Design and optimization of navigation and guidance techniques for Mars pinpoint landing: Review and prospect[J]. Progress in Aerospace Sciences, 2017, 94: 82-94.
doi: 10.1016/j.paerosci.2017.08.002 URL |
| [4] |
MA X, NING X L, FANG J C. Analysis of orbital dynamic equation in navigation for a Mars gravity-assist mission[J]. The Journal of Navigation, 2012, 65(3): 531-548.
doi: 10.1017/S0373463312000100 URL |
| [5] | BHASKARAN S. Autonomous navigation for deep space missions[C]∥SpaceOps 2012 Conference. Stockholm, Sweden: AIAA, 2012: 1267135. |
| [6] |
FANG J C, YANG Y, Study on innovation adaptive EKF for in-flight alignment of airborne POS[J]. IEEE Transactions on Instrumentation and Measurement, 2011, 60(4): 1378-1388.
doi: 10.1109/TIM.2010.2084710 URL |
| [7] |
NING X L, LI Z, YANG Y Q, et al. Analysis of ephemeris errors in autonomous celestial navigation during Mars approach phase[J]. The Journal of Navigation, 2017, 70(3): 505-526.
doi: 10.1017/S0373463316000734 URL |
| [8] |
SI F, ZHAO Y, LIN Y H. Adaptively tuning sampling weights of the unscented Kalman filter in starlight refraction navigation[J]. Optik, 2017, 148: 300-311.
doi: 10.1016/j.ijleo.2017.08.097 URL |
| [9] |
XIONG K, WEI C L, LIU L D. Multiple-model adaptive estimation for space surveillance with measurement uncertainty[J]. Optimal Control Applications and Methods, 2016, 37(2): 404-423.
doi: 10.1002/oca.2176 URL |
| [10] |
LIU W W, LIU Y C, BUCKNALL R. A robust localization method for unmanned surface vehicle (USV) navigation using fuzzy adaptive Kalman filtering[J]. IEEE Access, 2019, 7: 46071-46083.
doi: 10.1109/ACCESS.2019.2909151 URL |
| [11] |
GAO X L, LUO H Y, BAO B K, et al. RL-AKF: An adaptive Kalman filter navigation algorithm based on reinforcement learning for ground vehicles[J]. Remote Sensing, 2020, 12(11): 1704.
doi: 10.3390/rs12111704 URL |
| [12] |
FRASER C T, ULRICH S. Adaptive extended Kalman filtering strategies for spacecraft formation relative navigation[J]. Acta Astronautica, 2021, 178: 700-721.
doi: 10.1016/j.actaastro.2020.10.016 URL |
| [13] | 卞鸿巍, 金志华, 王俊璞, 等. 组合导航系统新息自适应卡尔曼滤波算法[J]. 上海交通大学学报, 2006, 40(6): 1000-1003. |
| BIAN Hongwei, JIN Zhihua, WANG Junpu, et al. The innovation-based estimation adaptive Kalman filter algorithm for INS/GPS integrated navigation system[J]. Journal of Shanghai Jiao Tong University, 2006, 40(6): 1000-1003. | |
| [14] | HUANG B H, WANG J J, ZHANG J F, et al. Variational bayesian adaptive Kalman filter for integrated navigation with unknown process noise covariance[C]∥2022 2nd International Conference on Consumer Electronics and Computer Engineering. Guangzhou, China: IEEE, 2022: 436-443. |
| [15] |
ZHANG J, WANG S P, LI W S, et al. A multi-mode switching variational bayesian adaptive Kalman filter algorithm for the SINS/PNS/GMNS navigation system of pelagic ships[J]. Sensors (Basel, Switzerland), 2022, 22(9): 3372.
doi: 10.3390/s22093372 URL |
| [16] |
ZHANG X Y, DUAN H B, LUO Q N. Levenberg-Marquardt based artificial physics method for mobile robot oscillation alleviation[J]. Science China Physics Mechanics Astronomy, 2014, 57(9): 1771-1777.
doi: 10.1007/s11433-013-5244-9 URL |
| [17] |
DUXBURY T C, BORN G H, JERATH N. Viewing phobos and deimos for navigating mariner[J]. Journal of Spacecraft and Rockets, 1974, 11(4): 215-222.
doi: 10.2514/3.62046 URL |
| [18] | LEE D J, ALFRIEND K. Adaptive sigma point filtering for state and parameter estimation[C]∥AIAA/AAS Astrodynamics Specialist Conference and Exhibit. Providence, Rhode Island, USA: AIAA, 2004: 1-20. |
| [19] |
BUSSE F D, HOW J P, SIMPSON J. Demonstration of adaptive extended Kalman filter for low-Earth-orbit formation estimation using CDGPS[J]. Navigation, 2003, 50(2): 79-93.
doi: 10.1002/j.2161-4296.2003.tb00320.x URL |
| [1] | Dong Kaijie, Li Ziqi, Gao Mingxing, Zhang Jianhua, Li Duanling. Review: Development of Micro-Scale Planetary Surface Exploration Robots [J]. J Shanghai Jiaotong Univ Sci, 2026, 31(1): 221-240. |
| [2] | LIU Yuanyuan, ZHANG Shunjia, YANG Yi, GENG Jianqiang. A Robust Passive Localization Algorithm Based on Spherical Cubature Kalman Filter [J]. Air & Space Defense, 2025, 8(5): 53-63. |
| [3] | ZHANG Yuge, GENG Jianqiang, YANG Guangyu, ZHU Supeng, HOU Zhenqian, FU Wenxing. Multi-Missile Cooperative Passive Localization Algorithm Based on IMM-SRCKF for Maneuvering Targets [J]. Air & Space Defense, 2025, 8(2): 58-65. |
| [4] | FAN Pengfei, LI Qingbo, LI Zhen, CHEN Chenglin. Research on Guidance Information Extraction Algorithm Based on Radar Relative Measurement [J]. Air & Space Defense, 2025, 8(2): 50-57. |
| [5] | ZHAO Yanfei1,2,3(赵艳飞), XIAO Peng4 (肖鹏), WANG Jingchuan1,2,3* (王景川), GUO Rui4*(郭锐). Semi-Autonomous Navigation Based on Local Semantic Map for Mobile Robot [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(1): 27-33. |
| [6] | HE Qinglin, ZHAO Hongyu, CHEN Yuxuan, HOU Xianghao. Design of Distributed Underwater Acoustic Tracking Algorithm for Aerial Targets Based on CRLB [J]. Air & Space Defense, 2025, 8(1): 86-94. |
| [7] | ZHONG Yiming1, YU Caoyang1, 2, XIANG Xianbo2, 3, LIAN Lian1, 4. Motion Prediction of Marine Vehicles Based on Cascaded Filter and Error-Triggered Support Vector Regression [J]. Ocean Engineering Equipment and Technology, 2025, 12(1): 133-140. |
| [8] | XIA Yang1 (夏杨), REN Guanghui2 (任光辉), WAN Yuan1 (万缘), MAO Xuchu1∗ (茅旭初). Multi-GNSS Fusion Real-Time Kinematic Algorithm Based on Extended Kalman Filter Correction Model for Medium-Long Baselines [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(6): 1191-1201. |
| [9] | TANG Shengjing, WANG Taiyan, ZHAO Ganglian, GUO Jie, LI Jiali, YIN Hang(. Review of Multi-Sensor Data Fusion for Target Tracking [J]. Air & Space Defense, 2024, 7(4): 18-29. |
| [10] | QIAN Leiyuan, QIN Fangjun, LI Kailong, ZHU Tiangao. Robust Adaptive Algorithm Based on SE(3) and Its Application in SINS/DVL [J]. Journal of Shanghai Jiao Tong University, 2024, 58(4): 498-510. |
| [11] | DU Ning, WU Shufan, CHEN Zhansheng, CHEN Wenhui, WANG Shiyao, XU Jiaguo, QIN Dongdong. Attitude Planning Method of Satellite Staring Imaging to Aerial Dynamic Target [J]. Journal of Shanghai Jiao Tong University, 2024, 58(4): 411-418. |
| [12] | CHEN Kun(陈坤), ZHAO Xu(赵旭), DONG Chunyu(董春玉), DI Zichao(邸子超), CHEN Zongzhi(陈宗枝). Anti-Occlusion Object Tracking Algorithm Based on Filter Prediction [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(3): 400-413. |
| [13] | WU Jiang, ZHANG Yan, LIU Zelong, CHENG Gang, LEI Dong, JIAO Chaoyong. State of Charge Estimation of Lithium-Ion Battery Considering Operating Conditions and Aging Degree [J]. Journal of Shanghai Jiao Tong University, 2024, 58(12): 1935-1945. |
| [14] |
Wang Yafeng, Huang Peishuo, , Yu Xiaqiong, Song Lei, Yu Wenbin.
Processing of Beidou Positioning Error in the Integrated Navigation for Use At Sea [J]. Ocean Engineering Equipment and Technology, 2023, 10(3): 76-82. |
| [15] | LI Jian1 (李坚),WANG Xingchao1 (王星超),ZHONG Min2 (钟敏),ZHENG Jian2(郑剑),SUN Zhenglong1*(孙正隆). Real-Time Slice-to-Volume Registration-Based Autonomous Navigation for Robot-Assisted Thyroid Biopsy [J]. J Shanghai Jiaotong Univ Sci, 2023, 28(3): 330-338. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||