Journal of Shanghai Jiao Tong University ›› 2022, Vol. 56 ›› Issue (8): 1024-1033.doi: 10.16183/j.cnki.jsjtu.2021.154
• Mechanical Engineering • Previous Articles Next Articles
HUANG Yuhao1, HAN Chao1, ZHAO Minghui2, DU Qiankun1, WANG Shigang1( )
)
Received:2021-05-06
Online:2022-08-28
Published:2022-08-26
Contact:
WANG Shigang
E-mail:wangshigang@sjtu.edu.cn
CLC Number:
HUANG Yuhao, HAN Chao, ZHAO Minghui, DU Qiankun, WANG Shigang. Multi-Objective Optimization Strategy of Trajectory Planning for Unmanned Aerial Vehicles Considering Constraints of Safe Flight Corridors[J]. Journal of Shanghai Jiao Tong University, 2022, 56(8): 1024-1033.

Fig.1
Piece-wise polynomial trajectories
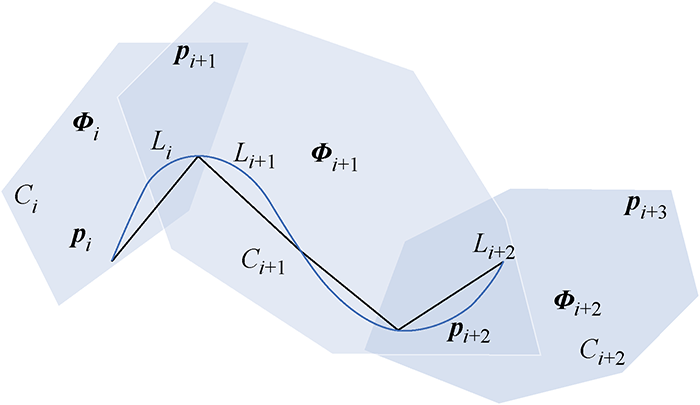

Fig.2
Rewiring operations of RRT* algorithm
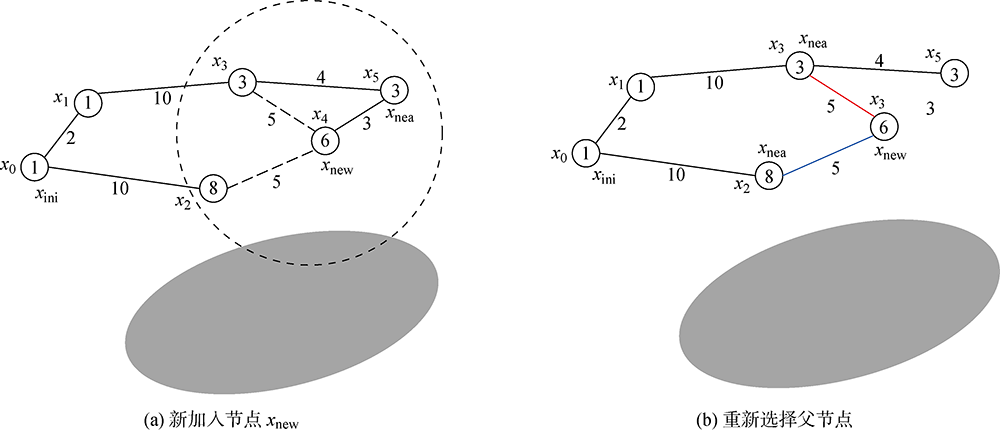
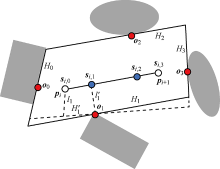
Fig.3
Construction of safe flight corridor
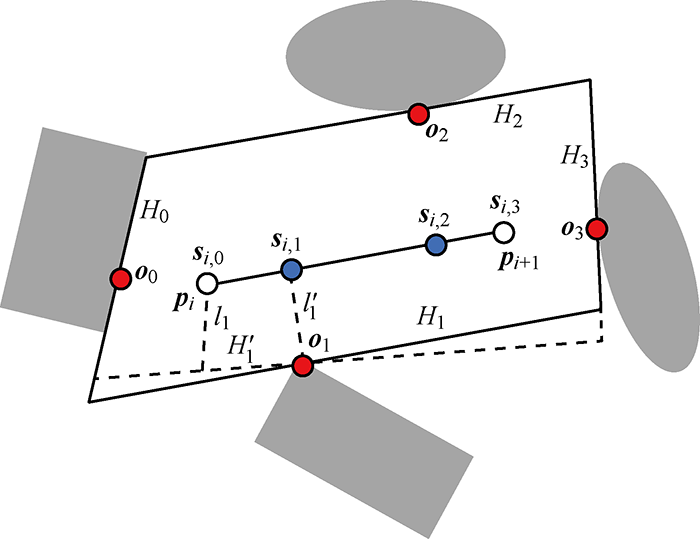
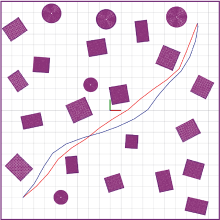
Fig.4
Initial path generated by RRT* algorithm
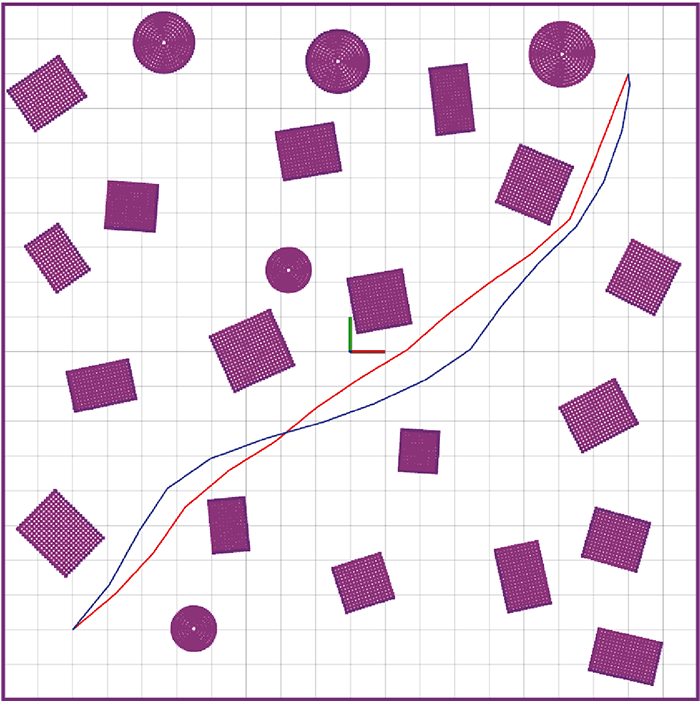

Fig.5
Comparison of initial path generated by two optimization methods

Fig.6
Comparison of SFC and proposed algorithms at an obstacle density of 0.08
Tab.1
Comparison of SFC and proposed algorithms at different obstacle densities
| ρ | 本文算法 | SFC算法 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| | omin/m | | tu/s | | omin/m | | tu/s | ||
| 0.02 | 1.286 | 0.510 | 0.397 | 1.137 | 1.302 | 0.473 | 0.363 | 1.190 | |
| 0.04 | 1.048 | 0.555 | 0.530 | 1.214 | 1.069 | 0.454 | 0.425 | 1.320 | |
| 0.06 | 1.059 | 0.528 | 0.499 | 1.540 | 1.085 | 0.446 | 0.411 | 1.756 | |
| 0.08 | 0.837 | 0.461 | 0.551 | 1.912 | 0.867 | 0.342 | 0.394 | 2.665 | |
| 0.10 | 0.781 | 0.462 | 0.592 | 1.994 | 0.802 | 0.359 | 0.448 | 2.355 | |
| 平均值 | 1.002 | 0.503 | 0.513 | 1.559 | 1.025 | 0.415 | 0.408 | 1.857 | |
Tab.2
Calculated results of obstacle clearance and gradient using safe flight corridors
| pT/m | 安全飞行通道计算结果 | 栅格地图计算结果 | |||
|---|---|---|---|---|---|
| omin/m | g | omin/m | g | ||
| (-7.34,-6.02, 2.00) | 1.15 | (-0.22,-0.98, 0.00) | 1.16 | (-0.18,-0.98, 0.00) | |
| (-3.20,-1.51, 1.65) | 0.54 | (0.08, 0.99,-0.04) | 0.63 | (-0.31, 0.95, 0.00) | |
| (1.02,-1.29, 1.18) | 0.93 | (0.98,-0.22, 0.05) | 0.94 | (0.97,-0.21, 0.01) | |
| (4.28, 1.19, 1.09) | 0.90 | (-0.51, 0.86, 0.03) | 0.92 | (-0.49, 0.87, 0.01) | |

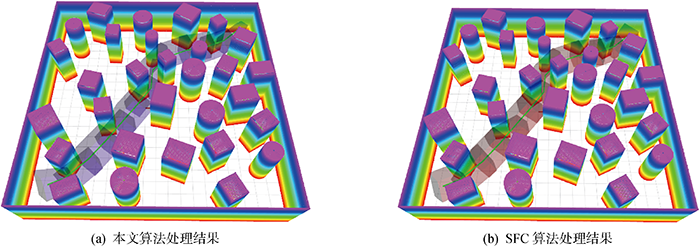
Fig.7
Trajectory generation effects of two algorithms

Tab.3
Comparison of trajectory planning algorithms
| 地图类型 | 本文算法 | GTOP算法 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Js/(m2·s-5) | | tw/s | lw/m | Js/(m2·s-5) | | tw/s | lw/m | ||
| 随机地图 | 69.106 | 1.063 | 21.514 | 23.690 | 108.871 | 1.011 | 29.714 | 23.714 | |
| 走廊地图 | 368.889 | 0.775 | 76.659 | 69.231 | 624.186 | 0.738 | 86.244 | 69.432 | |
| 矿井地图 | 309.090 | 2.157 | 59.893 | 56.435 | 337.129 | 2.139 | 70.404 | 56.948 | |
| [1] | ZHOU Y, RUI T, LI Y R, et al. A UAV patrol system using panoramic stitching and object detection[J]. Computers & Electrical Engineering, 2019, 80: 106473. |
| [2] |
MANSOURI S S, KANELLAKIS C, KOMINIAK D, et al. Deploying MAVs for autonomous navigation in dark underground mine environments[J]. Robotics and Autonomous Systems, 2020, 126: 103472.
doi: 10.1016/j.robot.2020.103472 URL |
| [3] | 赵建霞, 段海滨, 赵彦杰, 等. 基于鸽群层级交互的有人/无人机集群一致性控制[J]. 上海交通大学学报, 2020, 54(9): 973-980. |
| ZHAO Jianxia, DUAN Haibin, ZHAO Yanjie, et al. Consensus control of manned-unmanned aerial vehicle swarm based on hierarchy interaction of pigeons[J]. Journal of Shanghai Jiao Tong University, 2020, 54(9): 973-980. | |
| [4] | CHANDLER B, GOODRICH M A. Online RRT and online FMT: Rapid replanning with dynamic cost[C]// 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vancouver, Canada: IEEE, 2017: 6313-6318. |
| [5] | CAI Y Z, XI Q B, XING X J, et al. Path planning for UAV tracking target based on improved A-star algorithm[C]// 2019 1st International Conference on Industrial Artificial Intelligence. Shenyang, China: IEEE, 2019: 1-6. |
| [6] | 郝钏钏, 方舟, 李平. 基于Q学习的无人机三维航迹规划算法[J]. 上海交通大学学报, 2012, 46(12): 1931-1935. |
| HAO Chuanchuan, FANG Zhou, LI Ping. A 3-D route planning algorithm for unmanned aerial vehicle based on Q-learning[J]. Journal of Shanghai Jiao Tong University, 2012, 46(12): 1931-1935. | |
| [7] | CHEN J, LIU T B, SHEN S J. Online generation of collision-free trajectories for quadrotor flight in unknown cluttered environments[C]// 2016 IEEE International Conference on Robotics and Automation. Stockholm, Sweden: IEEE, 2016: 1476-1483. |
| [8] |
LIU S K, WATTERSON M, MOHTA K, et al. Planning dynamically feasible trajectories for quadrotors using safe flight corridors in 3-D complex environments[J]. IEEE Robotics and Automation Letters, 2017, 2(3): 1688-1695.
doi: 10.1109/LRA.2017.2663526 URL |
| [9] | STOICAN F, PRODAN I, POPESCU D, et al. Constrained trajectory generation for UAV systems using a B-spline parametrization[C]// 2017 25th Mediterranean Conference on Control and Automation. Valletta, Malta: IEEE, 2017: 613-618. |
| [10] |
SATAI H A, ZAHRA M M A, RASOOL Z I, et al. Bézier curves-based optimal trajectory design for multirotor UAVs with any-angle pathfinding algorithms[J]. Sensors, 2021, 21(7): 2460.
doi: 10.3390/s21072460 URL |
| [11] | RICHTER C, BRY A, ROY N. Polynomial trajectory planning for aggressive quadrotor flight in dense indoor environments[M]. New York, NY, USA: Springer, 2016: 649-666. |
| [12] | INGERSOLL B T, INGERSOLL J K, DEFRANCO P, et al. UAV path-planning using bezier curves and a receding horizon approach[C]// AIAA Modeling and Simulation Technologies Conference. Reston, Virginia: AIAA, 2016: 3675. |
| [13] | LOPEZ B T, HOW J P. Aggressive 3-D collision avoidance for high-speed navigation[C]// 2017 IEEE International Conference on Robotics and Automation. Singapore: IEEE, 2017: 5759-5765. |
| [14] | MELLINGER D, KUMAR V. Minimum snap trajectory generation and control for quadrotors[C]// 2011 IEEE International Conference on Robotics and Automation. Shanghai, China: IEEE, 2011: 2520-2525. |
| [15] | OLEYNIKOVA H, BURRI M, TAYLOR Z, et al. Continuous-time trajectory optimization for online UAV replanning[C]// 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems. Daejeon, South Korea: IEEE, 2016: 5332-5339. |
| [16] | GAO F, LIN Y, SHEN S J. Gradient-based online safe trajectory generation for quadrotor flight in complex environments[C]// 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vancouver, Canda: IEEE, 2017: 3681-3688. |
| [17] |
HORNUNG A, WURM K M, BENNEWITZ M, et al. OctoMap: An efficient probabilistic 3D mapping framework based on octrees[J]. Autonomous Robots, 2013, 34(3): 189-206.
doi: 10.1007/s10514-012-9321-0 URL |
| [18] |
SVANBERG K. A class of globally convergent optimization methods based on conservative convex separable approximations[J]. SIAM Journal on Optimization, 2002, 12(2): 555-573.
doi: 10.1137/S1052623499362822 URL |
| [1] | LI Dengpan, REN Xiaoming, YAN Nannan. Real-Time Detection of Insulator Drop String Based on UAV Aerial Photography [J]. Journal of Shanghai Jiao Tong University, 2022, 56(8): 994-1003. |
| [2] | YUAN Dongdong (袁冬冬), WANG Yankai∗ (王彦恺), BAI Jiaqi (白嘉琪). Multi-UAV Route Re-Generation Method Based on Trajectory Data [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(6): 806-816. |
| [3] | GUO Pengjun, ZHANG Rui, GAO Guangen, XU Bin. Cooperative Navigation of UAV Formation Based on Relative Velocity and Position Assistance [J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1438-1446. |
| [4] | ZHOU Qixian, WANG Yin, SUN Xuean. Control of Unmanned Aerial Vehicle Based on Gain Adaptive Super-Twisting Sliding Mode Theory [J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1453-1460. |
| [5] | SHEN Qiyue (沈琦越), WANG Bing (王 冰), WANG Chunxiang∗ (王春香). Real-Time Trajectory Planning for On-road Autonomous Tractor-Trailer Vehicles [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(5): 722-730. |
| [6] | LI Zhen, XU Bingqing, LI Qingbo, YAN Xiongwei, LI Boya. Gliding Vehicle Trajectory Planning Based on Sequential Convex Optimization Algorithm [J]. Air & Space Defense, 2021, 4(4): 50-56. |
| [7] | JIN Yudong (靳宇栋), FENG Jiabo (冯家波), ZHANG Weijun (张伟军). UAV Task Allocation for Hierarchical Multiobjective Optimization in Complex Conditions Using Modified NSGA-III with Segmented Encoding [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(4): 431-445. |
| [8] | YAO Tiancheng, ZHAO Yongsheng, WANG Hongyu, HE Yanping, DING Zilong, CHI Zheying, CAI Weikai. Development of a Hybrid Solar and Wind-Powered Long-Range Unmanned Ocean Stereo Exploration Vessel [J]. Journal of Shanghai Jiao Tong University, 2021, 55(2): 215-220. |
| [9] | LI Zheng, CHEN Jianwei, PENG Bo . UAV Cluster Path Planning Based on Pseudo-spectral Method [J]. Air & Space Defense, 2021, 4(1): 52-59. |
| [10] | MA Zhonghang, ZHANG Zhinan. Design and Realization of a Versatile Simulation Platform for Telecontrol Multi-Rotor Unmanned Aerial Vehicle with a Robotic Arm [J]. Journal of Shanghai Jiaotong University, 2020, 54(6): 636-642. |
| [11] | WU Xin (武星), PU Juan (蒲娟), XIE Shaorong (谢少荣) . Attacking Strategy of Multiple Unmanned Surface Vehicles with Improved GWO Algorithm Under Control of Unmanned Aerial Vehicles [J]. Journal of Shanghai Jiao Tong University (Science), 2020, 25(2): 201-207. |
| [12] | YANG Yudan,ZHU Bingjie,GUO Zheng,YANG Xixiang. The Sensitivity Analysis of Energy System Parameters of Solar Powered Unmanned Aerial Vehicle [J]. Journal of Shanghai Jiaotong University, 2020, 54(10): 1045-1052. |
| [13] | WANG Hongyu,YIN Wurong,WANG Liang,HU Jianghao,QIAO Wenchao. Fast Edge Extraction Algorithm Based on HSV Color Space [J]. Journal of Shanghai Jiaotong University, 2019, 53(7): 765-772. |
| [14] | REN Xuanguang (任炫光), PAN Han (潘汉), JING Zhongliang (敬忠良), GAO Lei (高磊). Multi-Image Restoration Method Combined with Total Generalized Variation and lp-Norm Regularizations [J]. Journal of Shanghai Jiao Tong University (Science), 2019, 24(5): 551-558. |
| [15] | DUAN Junhong (端军红), LIU Yuefeng (刘跃峰), WAN Kaifang (万开方) . Intercept Mode Suitable for the Space-Based Kinetic Energy Interceptor [J]. Journal of Shanghai Jiao Tong University (Science), 2019, 24(5): 671-680. |
| Viewed | ||||||||||||||||||||||||||||||||||
|
Full text 1355
|
|
|||||||||||||||||||||||||||||||||
|
Abstract |
|
|||||||||||||||||||||||||||||||||