Journal of Shanghai Jiao Tong University ›› 2022, Vol. 56 ›› Issue (11): 1438-1446.doi: 10.16183/j.cnki.jsjtu.2022.232
• Guidance, Navigation and Control • Previous Articles Next Articles
GUO Pengjun1, ZHANG Rui1, GAO Guangen2, XU Bin1( )
)
Received:2022-06-21
Online:2022-11-28
Published:2022-12-02
Contact:
XU Bin
E-mail:smlieface.binxu@gmail.com
CLC Number:
GUO Pengjun, ZHANG Rui, GAO Guangen, XU Bin. Cooperative Navigation of UAV Formation Based on Relative Velocity and Position Assistance[J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1438-1446.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2022.232
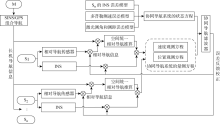
Fig.1
Diagram of UAV cooperative navigation scheme


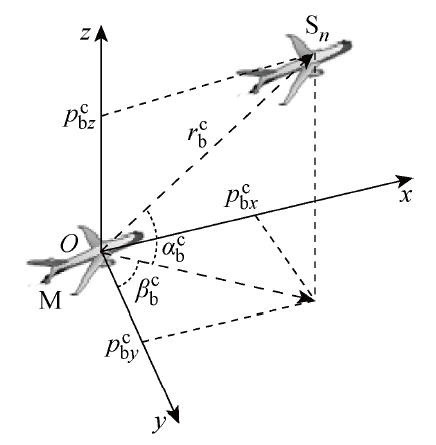
Fig.2
Relative navigation vector in b coordinates of slave
Tab.1
Configuration of relative navigation sensor
| 参数 | 数值 |
|---|---|
| 多普勒安装角误差/(') | (15, 10, 12) |
| 多普勒刻度系数误差/% | (0.8, 0.8, 0.8) |
| 激光测速白噪声均方根/(m·s-1) | (0.05, 0.05, 0.05) |
| 激光测距刻度系数误差/% | 0.5 |
| 激光测距白噪声均方根/m | 0.5 |
| 激光测角白噪声均方根/(°) | 0.1 |
Tab.2
Configuration of navigation parameters for formation members
| 参数 | M | Sn |
|---|---|---|
| 初始位置 (相对参考点)/m | (-200, 0, 40) | S1(0,-100, 0) S2(0, 100, 0) S3(0, 0, 25) |
| 初始速度/(m·s-1) | (0, 0, 0) | (0, 0, 0) |
| 初始姿态/(°) | (0, 0, 90) | (0, 0, 90) |
| 陀螺零偏/[(°)·h-1] | 0.002 | 0.02 |
| 角度随机游走/[(°)·h-0.5] | 0.001 | 0.01 |
| 加速度计零偏/mg | 0.02 | 0.1 |
| 速度随机游走/(mg·h-0.5) | 0.01 | 0.05 |
| GPS定位误差/m | 5 | 无GPS |
Fig.3
Real trajectory of leader and slave
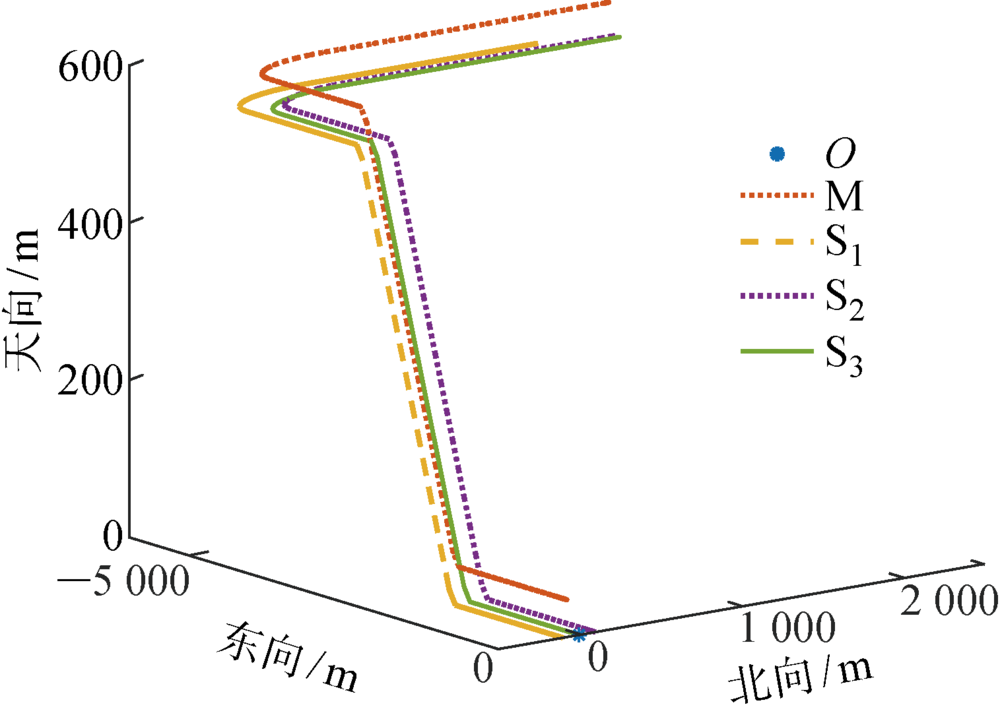
Fig.4
Error of inertial navigation solution of Slave S1
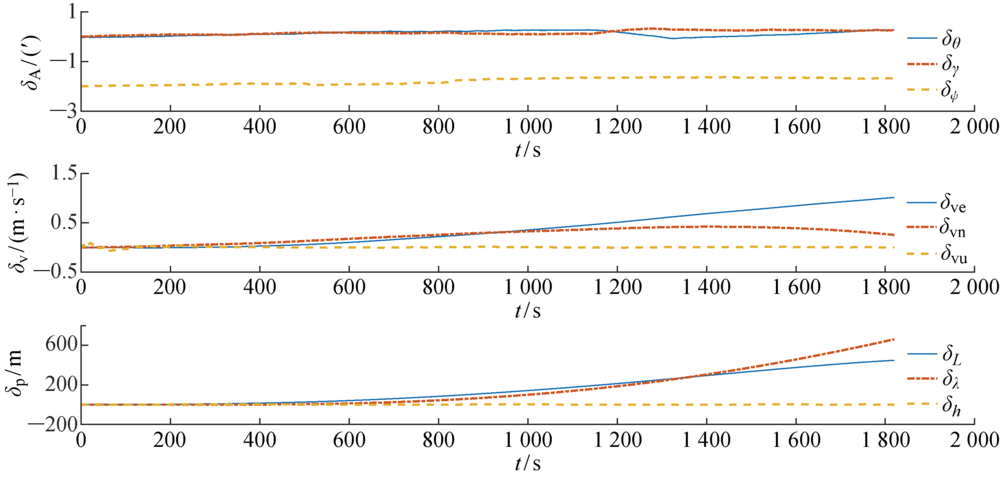
Fig.5
Error of inertial navigation solution of Slave S2

Fig.6
Error of inertial navigation solution of Slave S3
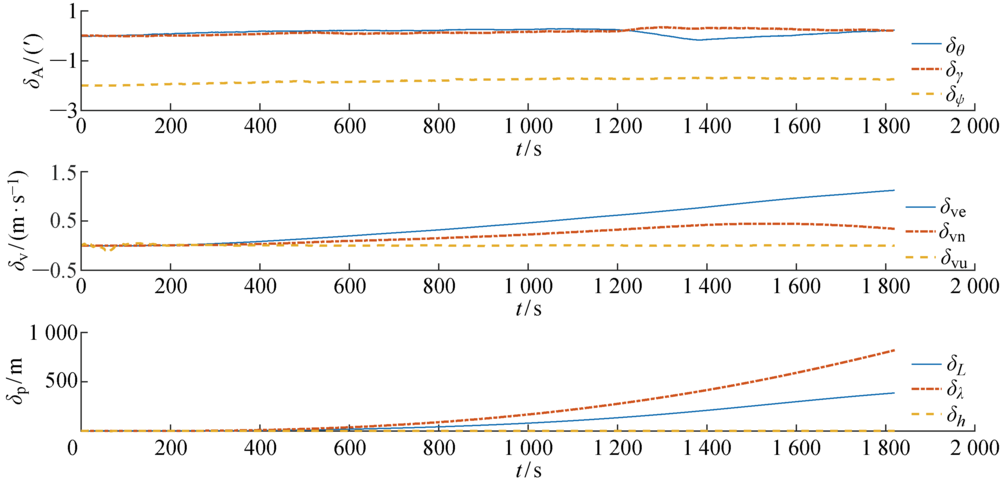
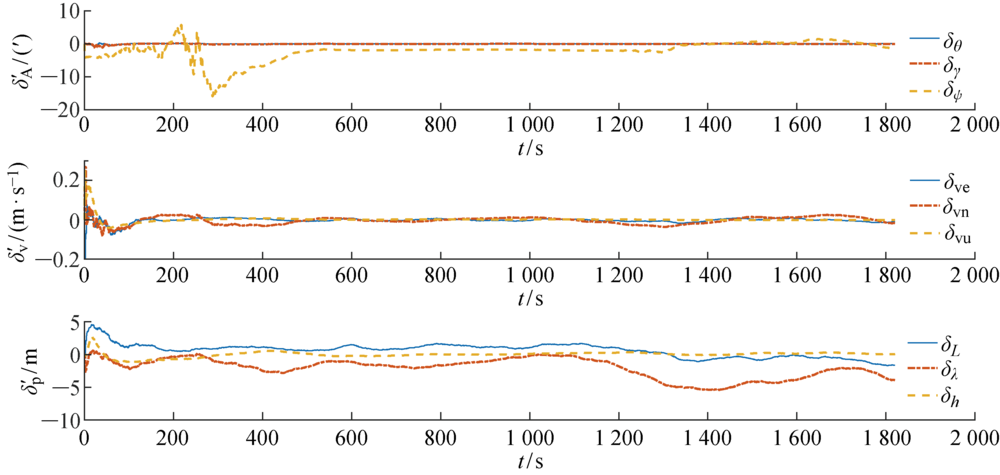
Fig.7
Error of cooperative navigation of Slave S1


Fig.8
Error of cooperative navigation of Slave S2
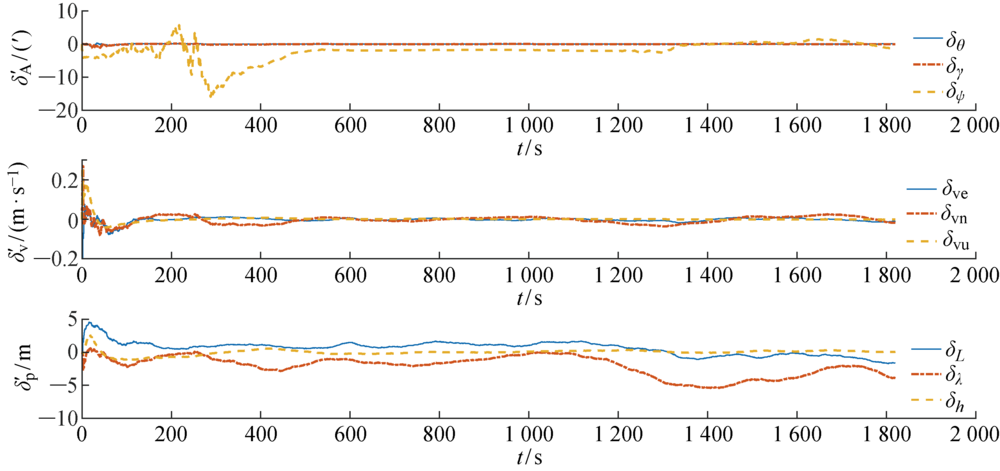
Fig.9
Error of cooperative navigation of Slave S3
| [1] | 武成锋, 程进, 郭晓云, 等. 飞行器集群协同定位与导航对抗技术发展与展望[J]. 宇航学报, 2022, 43(2): 131-142. |
| WU Chengfeng, CHENG Jin, GUO Xiaoyun, et al. Development and prospect of aircraft clusters cooperative positioning and navigation countermeasures technology[J]. Journal of Astronautics, 2022, 43(2): 131-142. | |
| [2] |
XIONG J, CHEONG J W, XIONG Z, et al. Hybrid cooperative positioning for vehicular networks[J]. IEEE Transactions on Vehicular Technology, 2020, 69(1): 714-727.
doi: 10.1109/TVT.2019.2953687 URL |
| [3] | XING X J, GUI H R, MA Z, et al. Multi-source fault tolerant integrated navigation for a certain UAV based on INS/BD/RP/TAN[C]∥2019 IEEE 15th International Conference on Control and Automation. Edinburgh, UK: IEEE, 2019: 313-318. |
| [4] | 徐博, 白金磊, 郝燕玲, 等. 多AUV协同导航问题的研究现状与进展[J]. 自动化学报, 2015, 41(3): 445-461. |
| XU Bo, BAI Jinlei, HAO Yanling, et al. The research status and progress of cooperative navigation for multiple AUVs[J]. Acta Automatica Sinica, 2015, 41(3): 445-461. | |
| [5] | 李鹏, 阮晓钢, 朱晓庆, 等. 基于深度强化学习的区域化视觉导航方法[J]. 上海交通大学学报, 2021, 55(5): 575-585. |
| LI Peng, RUAN Xiaogang, ZHU Xioaqing, et al. A regionalization vision navigation method based on deep reinforcement learning[J]. Journal of Shanghai Jiao Tong University, 2021, 55(5): 575-585. | |
| [6] | 刘晓洋, 徐胜红. 无人机编队分层式协同导航仿真研究[J]. 计算机仿真, 2020, 36(10): 44-48. |
| LIU Xiaoyang, XU Shenghong. Simulation research on hierarchical cooperative navigation of UAV formation[J]. Computer Simulation, 2020, 36(10): 44-48. | |
| [7] |
MOHIUDDIN A, TAREK T, ZWEIRI Y, et al. A survey of single and multi-UAV aerial manipulation[J]. Unmanned Systems, 2020, 8(2): 119-147.
doi: 10.1142/S2301385020500089 URL |
| [8] | 曲法义, 王小刚, 崔乃刚, 等. 基于惯导/GPS/视觉的无人机容错相对导航方法[J]. 中国惯性技术学报, 2013, (6): 781-785. |
| QU Fayi, WANG Xiaogang, CUI Naigang, et al. Fault-tolerance relative navigation approach based on SINS/GPS/Vision for UAV[J]. Journal of Chinese Inertial Technology, 2013, (6): 781-785. | |
| [9] |
TOMIC S, BEKO M, DINIS R, et al. Distributed algorithm for target localization in wireless sensor networks using RSS and AoA measurements[J]. Pervasive and Mobile Computing, 2017, 37: 63-77.
doi: 10.1016/j.pmcj.2016.09.013 URL |
| [10] | 谷旭平, 唐大全. 基于联邦滤波算法的无人机集群分层协同导航[J]. 系统工程与电子技术, 2022, 44(3): 967-976. |
| GU Xuping, TANG Daquan. Hierarchical cooperative navigation of UAV swarm based on federated filtering algorithm[J]. Systems Engineering and Electronics, 2022, 44(3): 967-976. | |
| [11] | 郭继峰, 郑红星, 贾涛, 等. 异构无人系统协同作战关键技术综述[J]. 宇航学报, 2020, 41(6): 686-696. |
| GUO Jifeng, ZHENG Hongxing, JIA Tao, et al. Summary of key technologies for heterogeneous unmanned system cooperative operations[J]. Journal of Astronautics, 2020, 41 (6): 686-696. | |
| [12] | 潘瑞鸿, 徐胜红. 基于几何特性的多无人机协同导航算法[J]. 兵器装备工程学报, 2017, 38(10): 55-59. |
| PAN Ruihong, XU Shenghong. Multi-UAV cooperative navigation algorithm based on geometric characteristics[J]. Journal of Ordnance Equipment Engineering, 2017, 38(10): 55-59. | |
| [13] | XU H, WANG L Q, ZHANG Y C, et al. Decentralized visual-inertial-UWB fusion for relative state estimation of aerial swarm[C]∥2020 IEEE International Conference on Robotics and Automation. Paris, France: IEEE, 2020: 8776-8782. |
| [14] | 陈超. UAV进近阶段组合导航信息融合方案设计[J]. 电光与控制, 2020, 27(2): 79-84. |
| CHEN Chao. Design of an information fusion scheme for integrated navigation of UAVs in approaching stage[J]. Electronics Optics & Control, 2020, 27(2): 79-84. | |
| [15] | 秦永元. 惯性导航[M]. 第二版. 北京: 科学出版社, 2014. |
| QIN Yongyuan. Inertial navigation[M]. 2nd ed. Beijing: Science Press, 2014. |
| [1] | HUANG Yuhao, HAN Chao, ZHAO Minghui, DU Qiankun, WANG Shigang. Multi-Objective Optimization Strategy of Trajectory Planning for Unmanned Aerial Vehicles Considering Constraints of Safe Flight Corridors [J]. Journal of Shanghai Jiao Tong University, 2022, 56(8): 1024-1033. |
| [2] | LI Dengpan, REN Xiaoming, YAN Nannan. Real-Time Detection of Insulator Drop String Based on UAV Aerial Photography [J]. Journal of Shanghai Jiao Tong University, 2022, 56(8): 994-1003. |
| [3] | YUAN Dongdong (袁冬冬), WANG Yankai∗ (王彦恺), BAI Jiaqi (白嘉琪). Multi-UAV Route Re-Generation Method Based on Trajectory Data [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(6): 806-816. |
| [4] | ZHOU Qixian, WANG Yin, SUN Xuean. Control of Unmanned Aerial Vehicle Based on Gain Adaptive Super-Twisting Sliding Mode Theory [J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1453-1460. |
| [5] | JIN Yudong (靳宇栋), FENG Jiabo (冯家波), ZHANG Weijun (张伟军). UAV Task Allocation for Hierarchical Multiobjective Optimization in Complex Conditions Using Modified NSGA-III with Segmented Encoding [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(4): 431-445. |
| [6] | YAO Tiancheng, ZHAO Yongsheng, WANG Hongyu, HE Yanping, DING Zilong, CHI Zheying, CAI Weikai. Development of a Hybrid Solar and Wind-Powered Long-Range Unmanned Ocean Stereo Exploration Vessel [J]. Journal of Shanghai Jiao Tong University, 2021, 55(2): 215-220. |
| [7] | LI Zheng, CHEN Jianwei, PENG Bo . UAV Cluster Path Planning Based on Pseudo-spectral Method [J]. Air & Space Defense, 2021, 4(1): 52-59. |
| [8] | MA Zhonghang, ZHANG Zhinan. Design and Realization of a Versatile Simulation Platform for Telecontrol Multi-Rotor Unmanned Aerial Vehicle with a Robotic Arm [J]. Journal of Shanghai Jiaotong University, 2020, 54(6): 636-642. |
| [9] | WU Xin (武星), PU Juan (蒲娟), XIE Shaorong (谢少荣) . Attacking Strategy of Multiple Unmanned Surface Vehicles with Improved GWO Algorithm Under Control of Unmanned Aerial Vehicles [J]. Journal of Shanghai Jiao Tong University (Science), 2020, 25(2): 201-207. |
| [10] | YANG Yudan,ZHU Bingjie,GUO Zheng,YANG Xixiang. The Sensitivity Analysis of Energy System Parameters of Solar Powered Unmanned Aerial Vehicle [J]. Journal of Shanghai Jiaotong University, 2020, 54(10): 1045-1052. |
| [11] | WANG Hongyu,YIN Wurong,WANG Liang,HU Jianghao,QIAO Wenchao. Fast Edge Extraction Algorithm Based on HSV Color Space [J]. Journal of Shanghai Jiaotong University, 2019, 53(7): 765-772. |
| [12] | LIU Zhihao,MIN Rong,FANG Cheng,YI Chao,LU Cunyue,MA Yixin. Transition Flight Control Strategy of Multiple Flight Mode Vertical Take-Off and Landing Unmanned Aerial Vehicle [J]. Journal of Shanghai Jiaotong University, 2019, 53(10): 1173-1181. |
| [13] | CHEN Zirong *(陈仔荣), LU Yafei (鲁亚飞), HOU Zhongxi (侯中喜), WANG Junwei (王俊伟). UAV's Coverage Search Planning Algorithm Based on Action Combinations [J]. Journal of Shanghai Jiao Tong University (Science), 2019, 24(1): 48-57. |
| [14] | YANG Qing (杨轻), YANG Zhong (杨忠), HU Guoxiong (胡国雄), DU Wei (杜威). A New Fusion Chemical Reaction Optimization Algorithm Based on Random Molecules for Multi-Rotor UAV Path Planning in Transmission Line Inspection [J]. Journal of Shanghai Jiao Tong University (Science), 2018, 23(5): 671-677. |
| [15] | Wang Zhe, Xu Lingfei, Gu Cunfeng. Simulation of Damage Effect of Laser Weapon System Against Composite Unmanned Aerial Vehicle [J]. Air & Space Defense, 2018, 1(1): 63-68. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||