上海交通大学学报 ›› 2025, Vol. 59 ›› Issue (9): 1249-1259.doi: 10.16183/j.cnki.jsjtu.2023.482
车志远, 余海涛( ), 庞玉毅, 章嘉辉
), 庞玉毅, 章嘉辉
收稿日期:2023-09-21
修回日期:2023-11-05
接受日期:2023-11-24
出版日期:2025-09-28
发布日期:2025-09-25
通讯作者:
余海涛,教授,博士生导师;E-mail:作者简介:车志远(1993—),博士生,现主要从事滑模控制理论与应用研究.
基金资助:
CHE Zhiyuan, YU Haitao(), PANG Yuyi, ZHANG Jiahui
Received:2023-09-21
Revised:2023-11-05
Accepted:2023-11-24
Online:2025-09-28
Published:2025-09-25
摘要:
永磁同步电动机的电流响应远快于机械动态,因此提出一种基于跟踪微分器的双时间尺度滑模控制方法.首先,在两相同步旋转正交坐标系上建立数学模型,并基于准稳态理论得到快慢子系统.其次,为了解决传统指数趋近律中趋近速度与抖振现象相互矛盾的问题,引入一种新型趋近律,并对其能达时间和切换带进行对比分析.然后,在双时间尺度内分别设计控制律,构建基于跟踪微分器的复合非级联滑模控制器.最后,通过仿真对比和实验结果验证方法的优势和有效性.研究结果表明,该控制策略能实现无超调跟踪,且伺服系统的动态响应迅速;在永磁同步电动机发生反转和受到外部负载扰动时,控制系统仍具有良好的动态性能和较强的鲁棒性.
中图分类号:
车志远, 余海涛, 庞玉毅, 章嘉辉. 基于跟踪微分器的永磁同步电动机双时间尺度滑模控制[J]. 上海交通大学学报, 2025, 59(9): 1249-1259.
CHE Zhiyuan, YU Haitao, PANG Yuyi, ZHANG Jiahui. Tracking Differentiator-Based Dual-Time-Scale Sliding Mode Control for Permanent Magnet Synchronous Motor[J]. Journal of Shanghai Jiao Tong University, 2025, 59(9): 1249-1259.
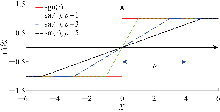
图1
符号函数和饱和函数
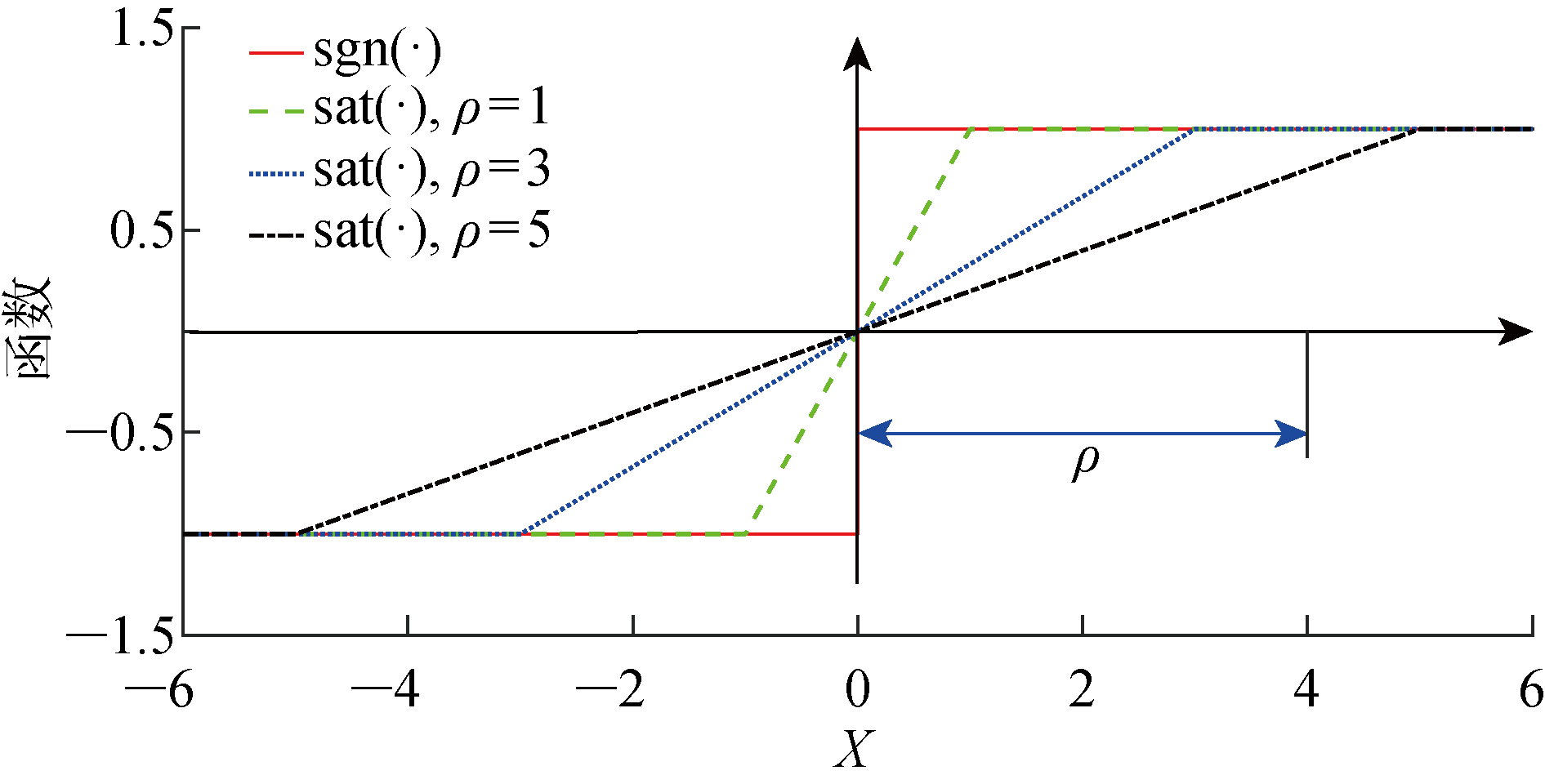
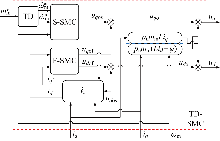
图2
基于跟踪微分器的非级联型复合滑模控制
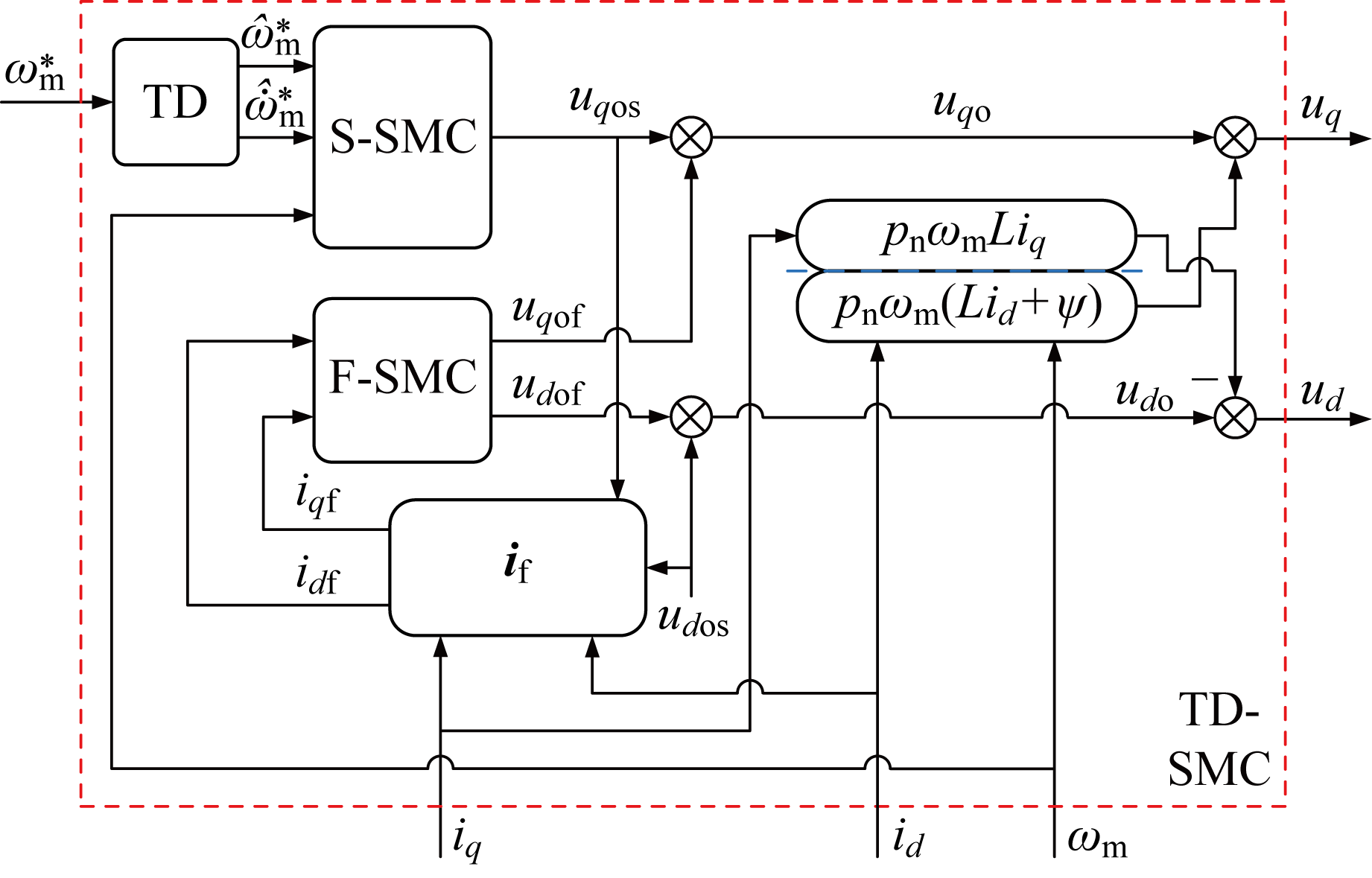
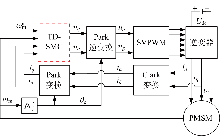
图3
PMSM的伺服系统整体控制框图
表1
PMSM的参数
| 参数 | 数值 |
|---|---|
| pn | 4 |
| R/Ω | 0.454 |
| L/mH | 4.492 |
| ψ/Wb | 0.1435 |
| F | 3.79×10-3 |
| J/(kg·m2) | 2.77×10-3 |
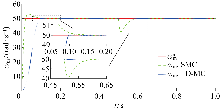
图4
滑模控制系统的响应性能
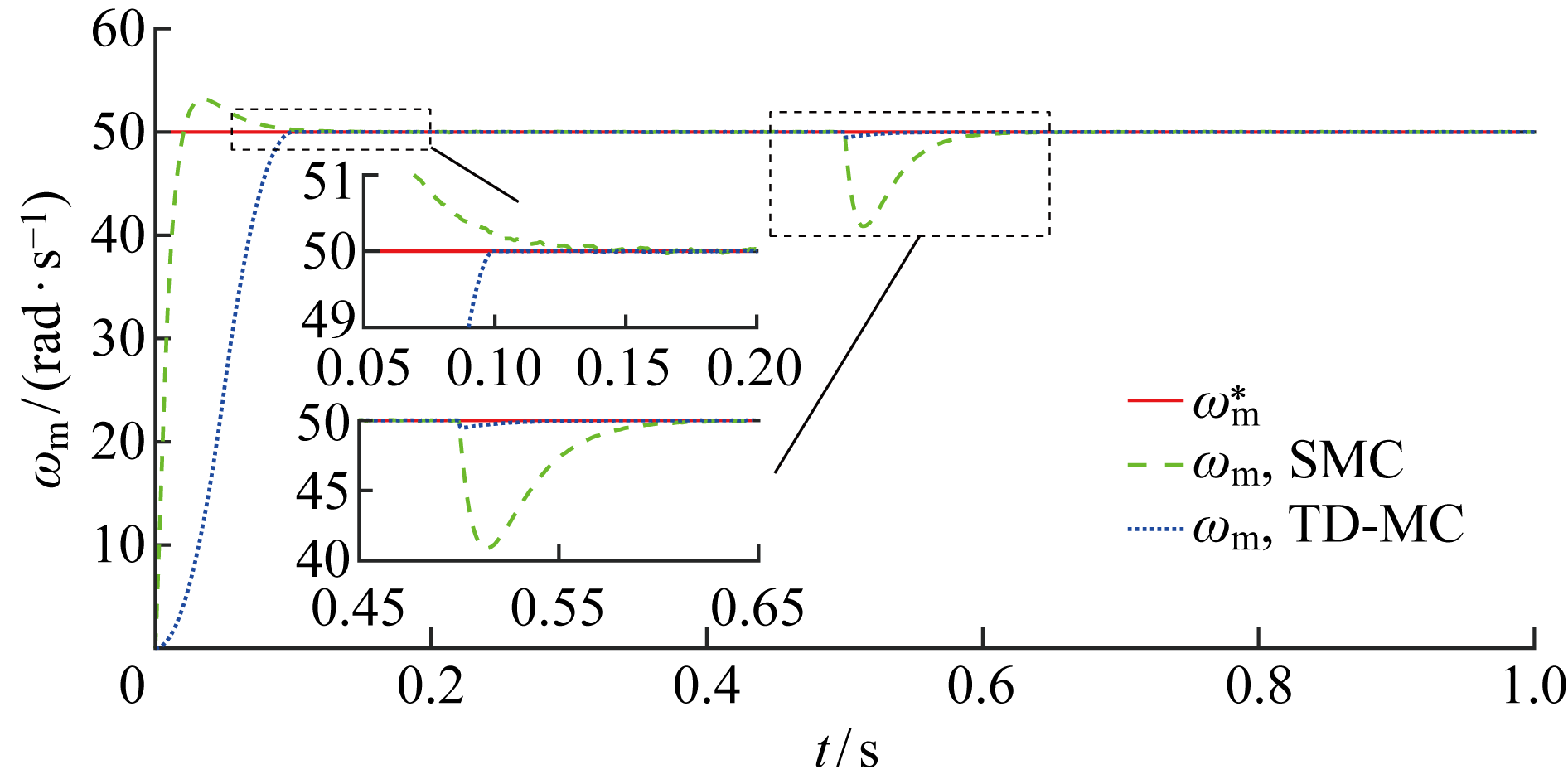
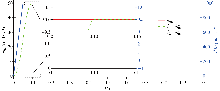
图5
非线性跟踪微分器的响应曲线(r=2×104)
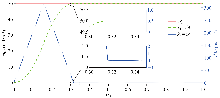
图6
非线性跟踪微分器的响应曲线(r=2×103)
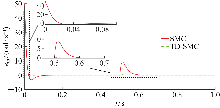
图7
滑模控制系统的跟踪误差
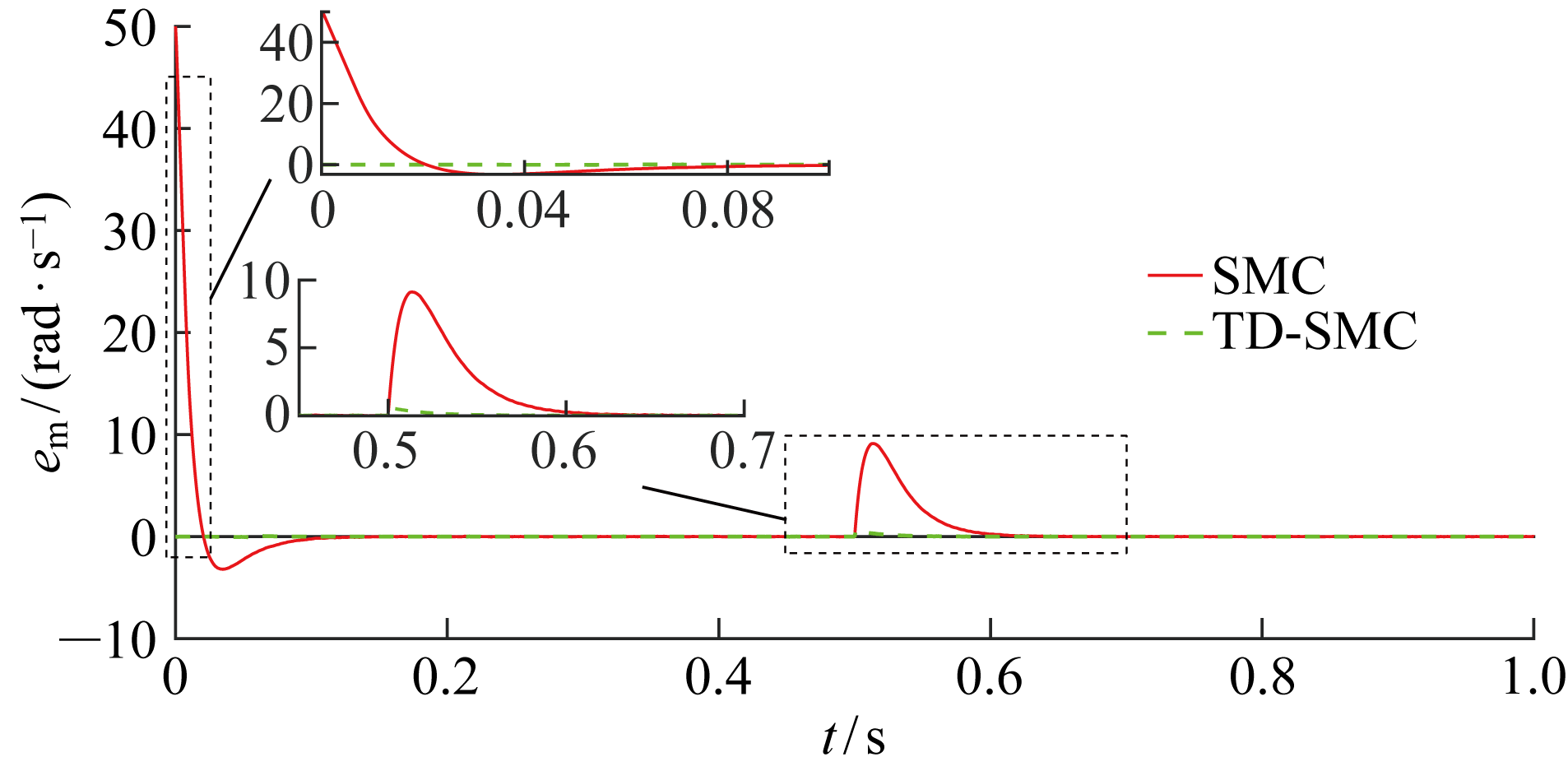
表2
滑模控制系统性能指标对比
| 控制 策略 | 超调量/ (rad·s-1) | 调节 时间/s | 跌落值(实际值)/ (rad·s-1) | 恢复时间 (实际值)/s |
|---|---|---|---|---|
| SMC | 3.2 | 0.12 | 9.1(40.9) | 0.12(0.62) |
| TD-SMC | - | < 0.1 | 0.5(49.5) | <0.04(<0.54) |
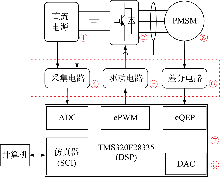
图8
调速系统整体框架

图9
调速系统硬件平台
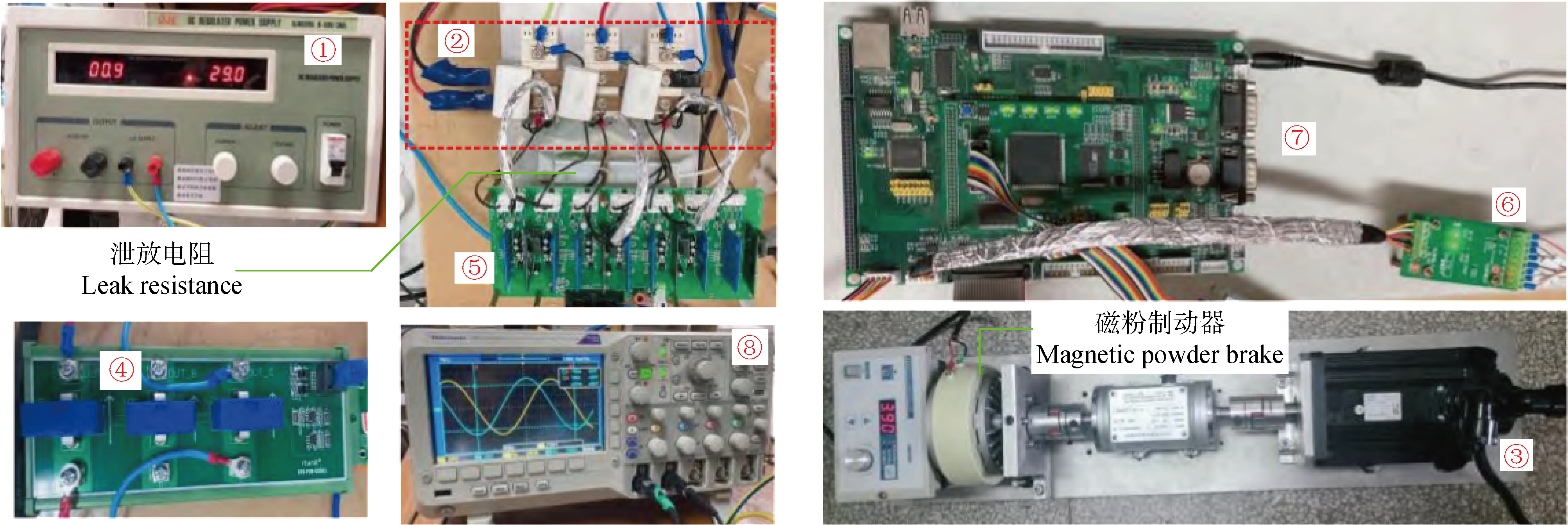
表3
慢变滑模控制器参数
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| cs | 60 | δ | 1000 |
| ksn | 0.1 | kT | 10 |
| ξ | 0.05 | σ | 1.5 |
| μ | 0.1 | km | 300 |
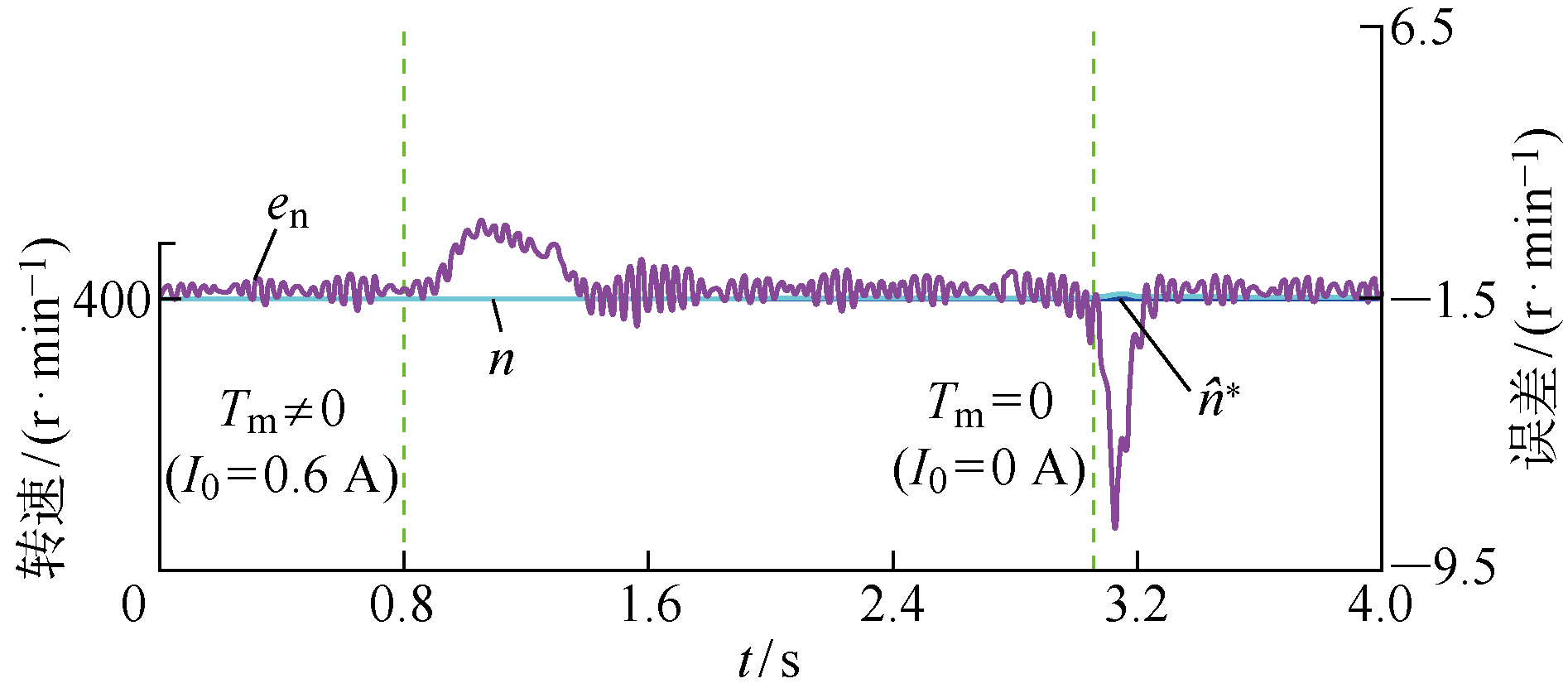
图10
跟踪微分器的估计曲线
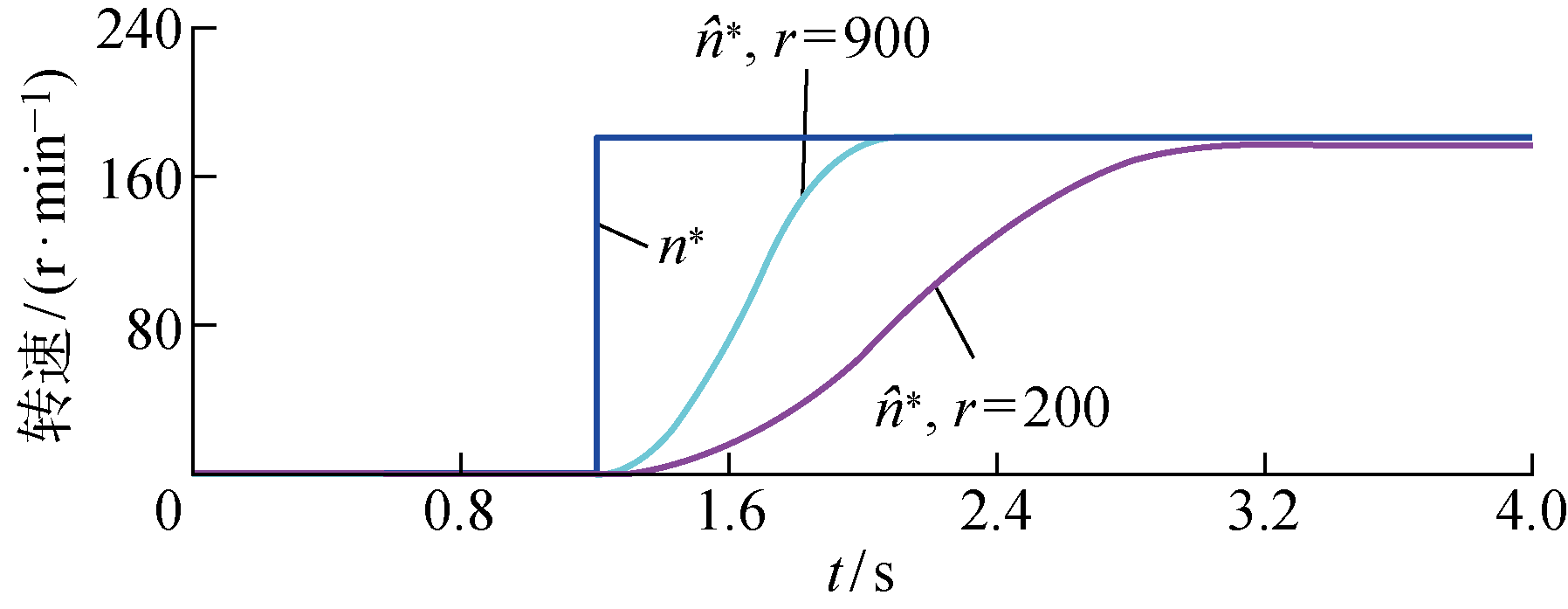
图11
非级联滑模控制的跟踪性能曲线
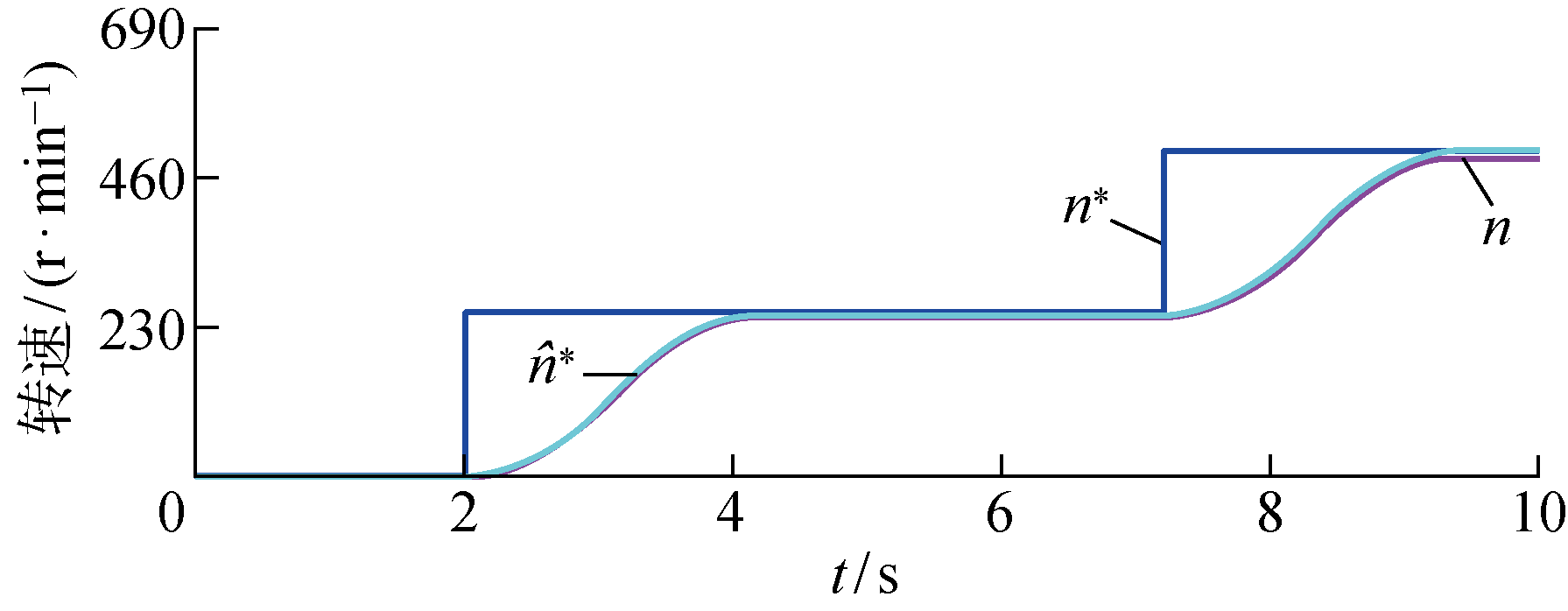
图12
正跳变的响应曲线
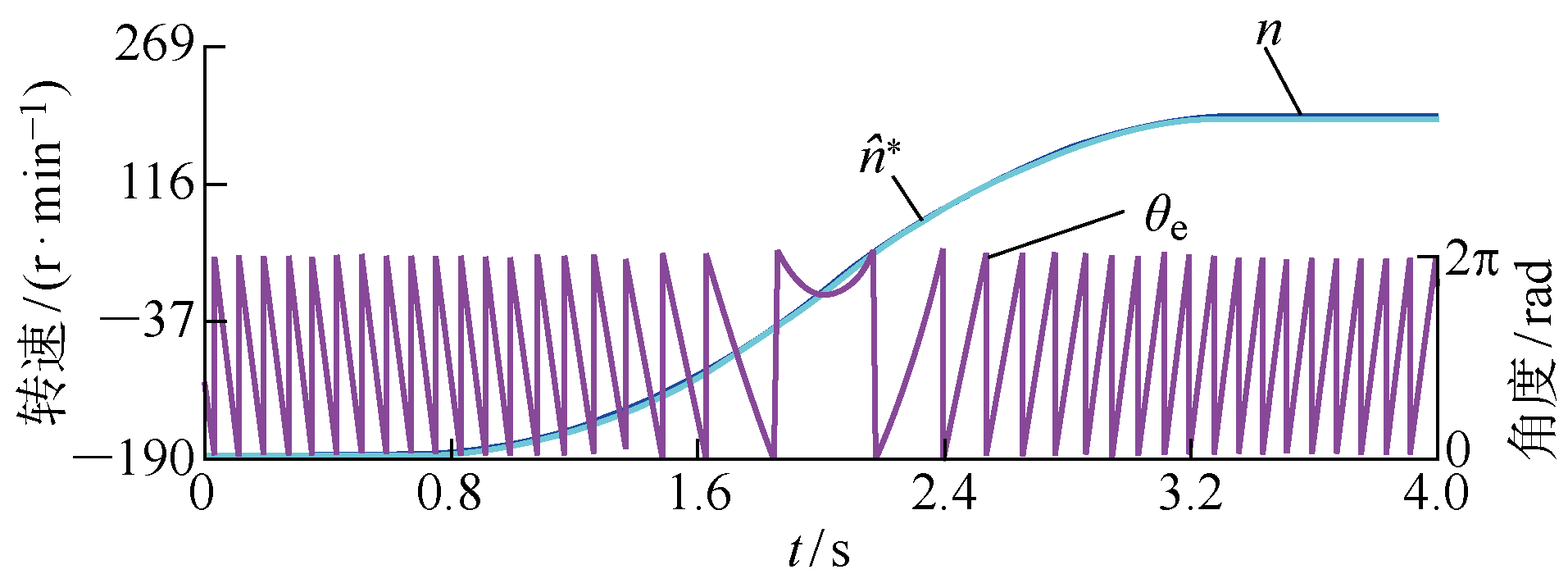
图13
滑模控制系统的抗干扰性能
| [1] |
YANG C Y, CHE Z Y, ZHOU L N. Composite feedforward compensation for force ripple in permanent magnet linear synchronous motors[J]. Journal of Shanghai Jiao Tong University (Science), 2019, 24(6): 782-788.
doi: 10.1007/s12204-019-2111-5 |
| [2] |
凌辉, 杜钦君, 冯晗, 等. 基于五电平变换器的开关磁阻电动机转矩脉动抑制方法[J]. 上海交通大学学报, 2022, 56(12): 1608-1618.
doi: 10.16183/j.cnki.jsjtu.2022.124 |
| LING Hui, DU Qinjun, FENG Han, et al. Torque ripple reduction method of switched reluctance motor based on five-level converter[J]. Journal of Shanghai Jiao Tong University, 2022, 56(12): 1608-1618. | |
| [3] | YU K L, WANG Z. Position sensorless control of IPMSM using adjustable frequency setting square-wave voltage injection[J]. IEEE Transactions on Power Electronics, 2022, 37(11): 12973-12979. |
| [4] |
张显库, 韩旭. 大型油轮艏摇混沌现象的仿真与滑模控制[J]. 上海交通大学学报, 2021, 55(1): 40-47.
doi: 10.16183/j.cnki.jsjtu.2019.104 |
| ZHANG Xianku, HAN Xu. Modeling and sliding mode control for chaotic yawing phenomenon of large oil tanker[J]. Journal of Shanghai Jiao Tong University, 2021, 55(1): 40-47. | |
| [5] | YANG C Y, CHE Z Y, ZHOU L N. Integral sliding mode control for singularly perturbed systems with mismatched disturbances[J]. Circuits, Systems, and Signal Processing, 2019, 38(4): 1561-1582. |
| [6] |
周齐贤, 王寅, 孙学安. 基于增益自适应超螺旋滑模理论的无人机控制[J]. 上海交通大学学报, 2022, 56(11): 1453-1460.
doi: 10.16183/j.cnki.jsjtu.2022.238 |
| ZHOU Qixian, WANG Yin, SUN Xuean. Control of unmanned aerial vehicle based on gain adaptive super-twisting sliding mode theory[J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1453-1460. | |
| [7] | 柯少兴, 李建贵, 郝诚, 等. 基于滑模观测器估计误差反馈的永磁同步电机转速控制策略[J]. 微电机, 2020, 53(6): 48-52. |
| KE Shaoxing, LI Jiangui, HAO Cheng, et al. Speed control strategy of PMSM based on estimation error feedback of synovial mode observer[J]. Micromotors, 2020, 53(6): 48-52. | |
| [8] | 刘京, 李洪文, 邓永停. 基于新型趋近律和扰动观测器的永磁同步电机滑模控制[J]. 工程科学学报, 2017, 39(6): 933-944. |
| LIU Jing, LI Hongwen, DENG Yongting. PMSM sliding-mode control based on novel reaching law and disturbance observer[J]. Chinese Journal of Engineering, 2017, 39(6): 933-944. | |
| [9] | 淡宁, 袁宇浩, 冯进. 基于快速STA与扰动观测器的PMSM滑模控制[J]. 计算机仿真, 2020, 37(10): 173-178. |
| DAN Ning, YUAN Yuhao, FENG Jin. Sliding mode control of PMSM based on fast STA and disturbance observer[J]. Computer Simulation, 2020, 37(10): 173-178. | |
| [10] | XU B, ZHANG L, JI W. Improved non-singular fast terminal sliding mode control with disturbance observer for PMSM drives[J]. IEEE Transactions on Transportation Electrification, 2021, 7(4): 2753-2762. |
| [11] | CHE Z Y, YU H T, MOBAYEN S, et al. A singular perturbation approach-based non-cascade sliding mode control for surface-mounted PMSMs[J]. Applied Sciences, 2022, 12(20): 10500. |
| [12] | CHE Z Y, YU H T, MOBAYEN S, et al. Dual-time-scale sliding mode control for surface-mounted permanent magnet synchronous motors[J]. Symmetry, 2022, 14(9): 1835. |
| [13] | ZHOU L N, SHEN L P, YANG C Y. Disturbance-observer based sliding mode control for fuzzy singularly perturbed systems[J]. Journal of Intelligent & Fuzzy Systems, 2019, 37(1): 1055-1064. |
| [14] | YOO H, GAJIC Z. New designs of linear observers and observer-based controllers for singularly perturbed linear systems[J]. IEEE Transactions on Automatic Control, 2018, 63(11): 3904-3911. |
| [1] | 栗大林, 华浩, 李然, 许少伦, 齐文娟. 高功率密度表嵌式磁极偏移永磁电动机转矩性能提升[J]. 上海交通大学学报, 2025, 59(9): 1237-1248. |
| [2] | 黄自鑫, 于澄嵩, 汪伟, 林梦颖, 徐达. 基于等价输入干扰误差估计的欠驱动脉宽调制整流器自抗扰控制[J]. 上海交通大学学报, 2025, 59(8): 1203-1215. |
| [3] | 皇金锋, 章乾. 基于超螺旋扩张状态观测器的耦合单电感双输出Buck变换器串级滑模解耦控制[J]. 上海交通大学学报, 2025, 59(5): 592-604. |
| [4] | 刘新宇, 王森, 曾龙, 原绍恒, 郝正航, 逯芯妍. 双馈风电场抑制电网低频振荡的自适应附加控制策略[J]. 上海交通大学学报, 2023, 57(9): 1156-1164. |
| [5] | 李梦璇, 郭建国, 许新鹏, 沈昱恒. 基于近端策略优化的制导律设计[J]. 空天防御, 2023, 6(4): 51-57. |
| [6] | 李庆波, 方泽远, 陈国良, 梅志伟, 杨婷. 基于跟踪微分器的捷联导引头解耦算法研究[J]. 空天防御, 2021, 4(4): 44-49. |
| [7] | 王家琪, 郭建国, 郭宗易, 赵斌. 基于干扰观测器的高马赫数飞行器滑模控制[J]. 空天防御, 2021, 4(3): 85-91. |
| [8] | 张显库, 韩旭. 大型油轮艏摇混沌现象的仿真与滑模控制[J]. 上海交通大学学报, 2021, 55(1): 40-47. |
| [9] | 刘邱, 赵东亚. 单输入单输出系统离散积分滑模预测控制[J]. 上海交通大学学报, 2020, 54(9): 898-903. |
| [10] | 贺宏伟, 邹早建, 曾智华. 欠驱动水面船舶的自适应神经网络-滑模路径跟随控制[J]. 上海交通大学学报, 2020, 54(9): 890-897. |
| [11] | 梅蓉. 森林环境下的无人直升机安全飞行控制[J]. 上海交通大学学报, 2020, 54(9): 994-999. |
| [12] | 刘悦, 张佳梁, 赵利娟, 甄子洋. 基于二阶滑模控制的多导弹协同制导律研究[J]. 空天防御, 2020, 3(3): 83-88. |
| [13] | 赵斌, 黄晓阳, 周军, 郭玥. 基于滑模控制的多弹分布式视线协同制导律设计[J]. 空天防御, 2020, 3(3): 16-23. |
| [14] | 张晓宇, 张鹏, 郑鑫, 倪元华. 基于固定时间收敛的终端角约束滑模制导律设计[J]. 空天防御, 2020, 3(3): 9-15. |
| [15] | 岳才成1,钱林方1,徐亚栋1,李颖2. 基于指数趋近律链传动弹仓自适应模糊滑模控制[J]. 上海交通大学学报, 2018, 52(6): 750-756. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||