上海交通大学学报 ›› 2025, Vol. 59 ›› Issue (10): 1568-1580.doi: 10.16183/j.cnki.jsjtu.2023.578
• 电子信息与电气工程 • 上一篇
詹泽辉1, 钟铭恩1( ), 袁彬淦2, 谭佳威2, 范康1
), 袁彬淦2, 谭佳威2, 范康1
收稿日期:2023-11-14
修回日期:2024-01-04
接受日期:2024-01-17
出版日期:2025-10-28
发布日期:2025-10-24
通讯作者:
钟铭恩,教授;E-mail:zhongmingen@xmut.edu.cn.
作者简介:詹泽辉(1997—),硕士生,从事智能交通和图像处理研究.
基金资助:
ZHAN Zehui1, ZHONG Ming’en1(), YUAN Bingan2, TAN Jiawei2, FAN Kang1
Received:2023-11-14
Revised:2024-01-04
Accepted:2024-01-17
Online:2025-10-28
Published:2025-10-24
摘要:
查处车辆违停是城市交通管理的重要内容.鉴于人工执法耗时耗力、定点监控抓拍覆盖范围有限等问题,探索更为灵活高效的自动检测方法具有现实意义.提出一种适用于路面移动载体的非停留式、一次完成的巡航检测技术.在平视且随机拍摄角度条件下采集并构建车辆违停图像数据集XMUT-VPI,为研究提供数据基础.通过构建多任务神经网络(MTPN)作为编码器,提取违停判断所需的关键要素信息;借助自主设计的可变形大核特征聚合模块(DLKA-C2f)和跨任务交互注意力机制(CTIAM),实现了90.3%的最高目标平均检测准确率、4.4%的最小轮胎触地点平均定位误差,以及78.5%的次优车位线分割平均交并比精度.设计高效解码器来进一步提取车位线骨架特征,拟合主车位可视区域,匹配目标车辆,解析轮胎触地点与车位的位置关系,进而实现对违法停车、不当停车和规范停车3类典型行为的判定.实验结果表明,在各类复杂干扰情况下,该算法的综合准确率达到98.1%,领先现有主流方法,可为违停的全自动路面巡航治理提供技术支持.
中图分类号:
詹泽辉, 钟铭恩, 袁彬淦, 谭佳威, 范康. 随机平视摄像条件下的路边车辆违停检测[J]. 上海交通大学学报, 2025, 59(10): 1568-1580.
ZHAN Zehui, ZHONG Ming’en, YUAN Bingan, TAN Jiawei, FAN Kang. Detection of Roadside Vehicle Parking Violations Under Random Horizontal Camera Condition[J]. Journal of Shanghai Jiao Tong University, 2025, 59(10): 1568-1580.
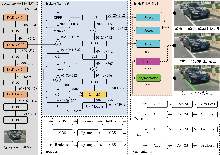
图1
MTPN模型结构
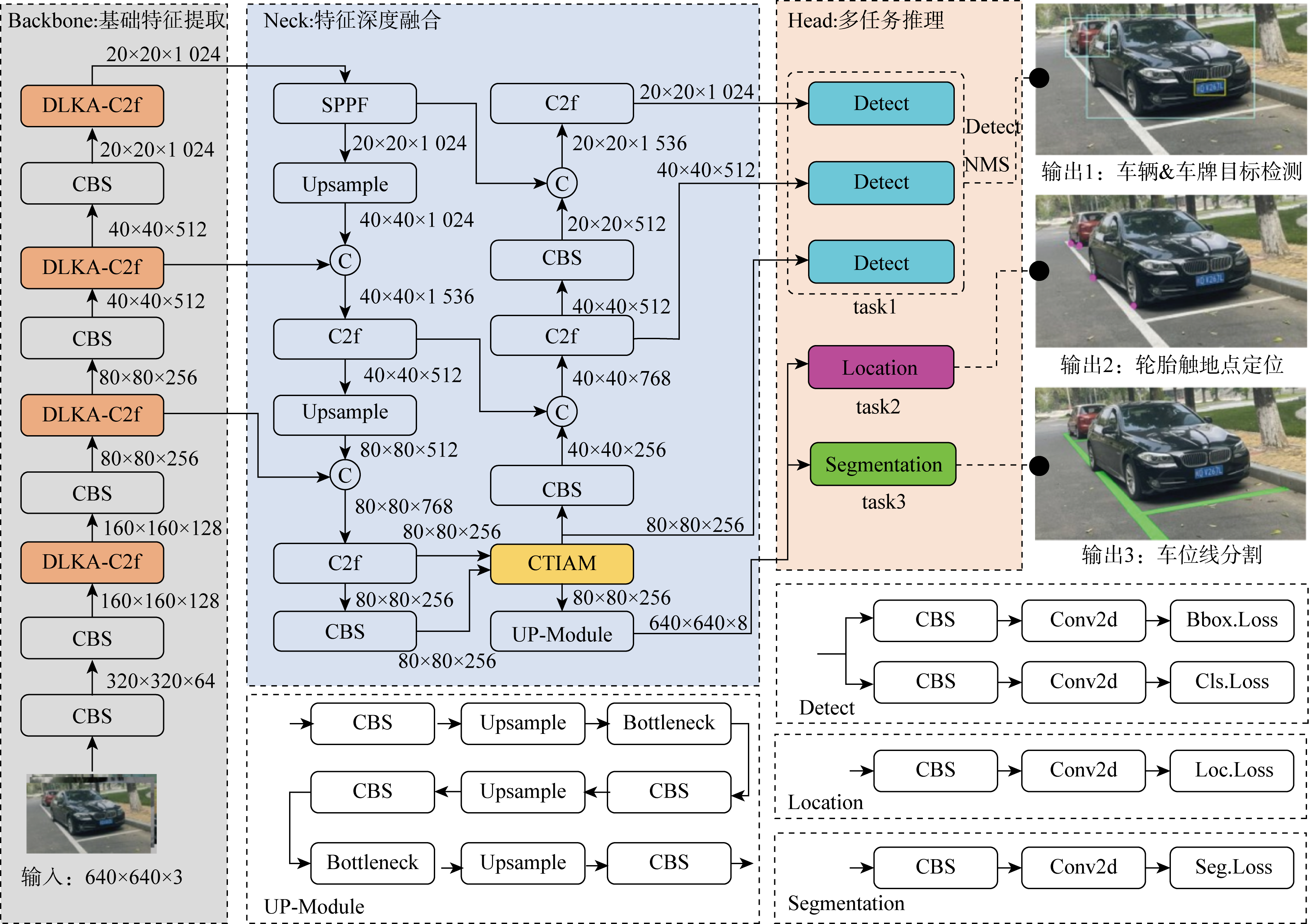
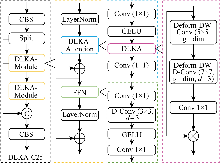
图2
DLKA-C2f结构
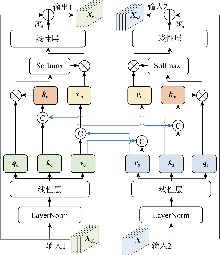
图3
跨任务交互注意力机制
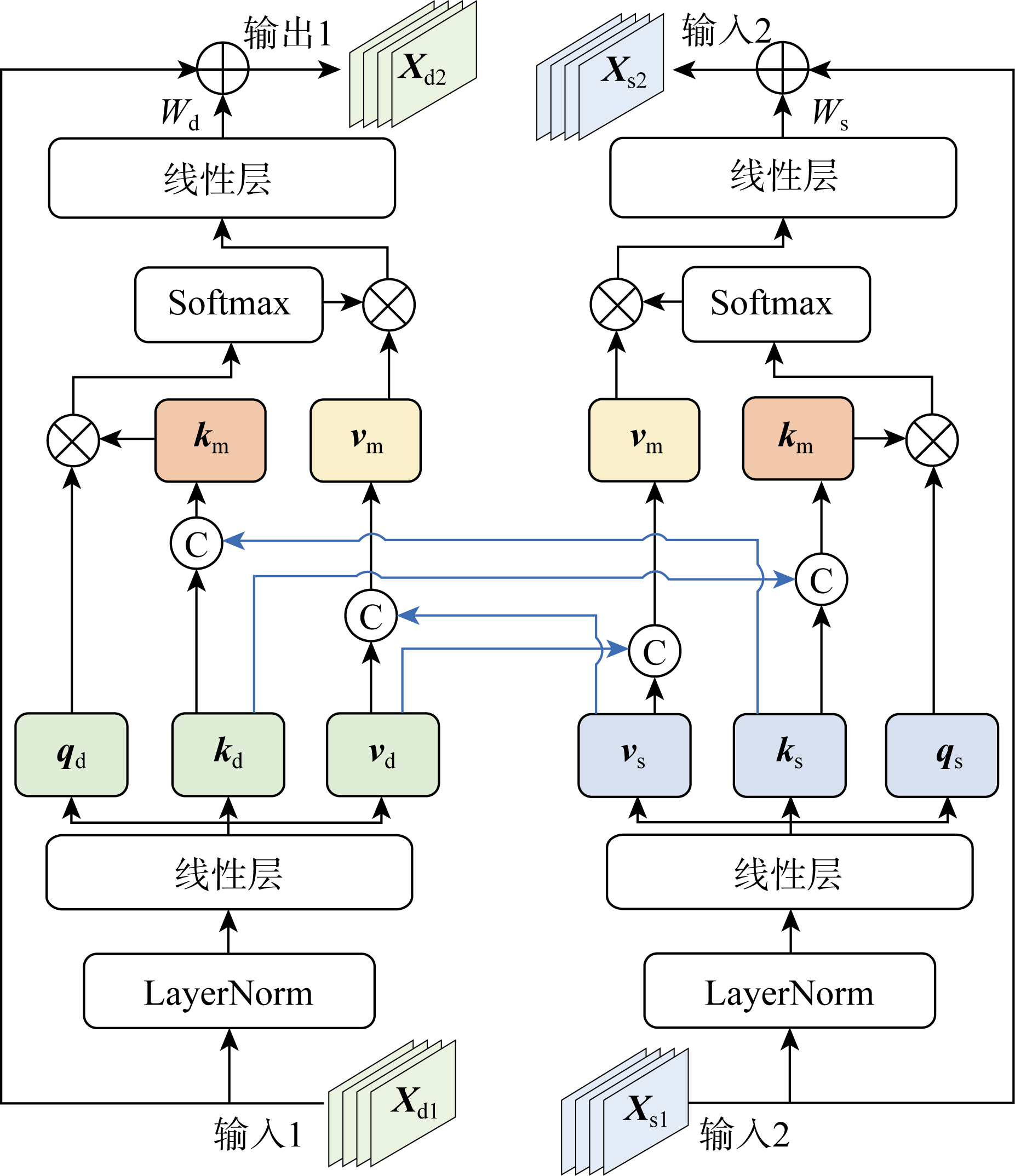
表1
权重参数搜索结果
| 组别 | α | β | γ | 准确率/% |
|---|---|---|---|---|
| 1 | 0.11 | 0.69 | 0.20 | 96.9 |
| 2 | 0.13 | 0.67 | 0.20 | 97.5 |
| 3 | 0.15 | 0.65 | 0.20 | 98.1 |
| 4 | 0.15 | 0.55 | 0.30 | 97.3 |
| 5 | 0.16 | 0.55 | 0.29 | 96.6 |
| 6 | 0.18 | 0.57 | 0.25 | 96.1 |

图4
XMUT-VPI数据集样本图像举例

表2
MTPN网络性能测试结果
| 算法 | mAP/% | R/% | NME/ % | mIoU/ % | 推理速度/ (帧·s-1) |
|---|---|---|---|---|---|
| YOLOX[ | 86.5 | 83.7 | - | - | 85.3 |
| DETR[ | 80.2 | 88.1 | - | - | 28.9 |
| HRNet[ | - | - | 8.1 | - | 88.7 |
| ViTPose[ | - | - | 5.5 | - | 82.5 |
| U2-Net[ | - | - | - | 77.9 | 40.2 |
| DeepLabv3+[ | - | - | - | 79.6 | 32.2 |
| YOLOv8[ | 87.2 | 86.2 | 7.2 | 75.8 | 78.2 |
| MTPN-1 | 89.7 | 85.5 | 5.1 | 77.3 | 75.4 |
| MTPN-2 | 88.5 | 84.9 | 5.6 | 77.8 | 76.2 |
| MTPN | 90.3 | 86.7 | 4.4 | 78.5 | 73.6 |

图5
典型环境下的MTPN模型推理结果举例
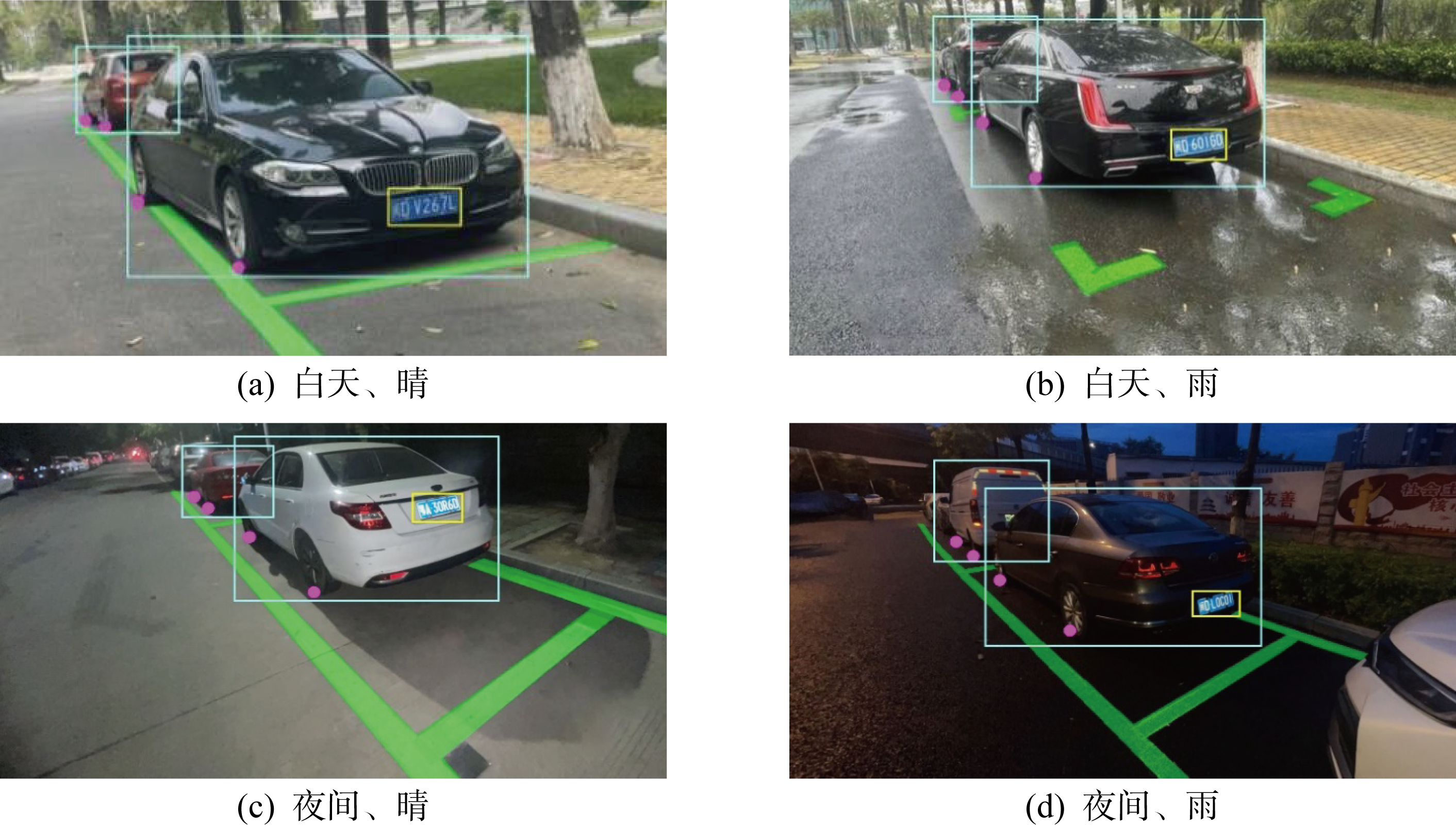
图6
车位线骨架曲线提取结果
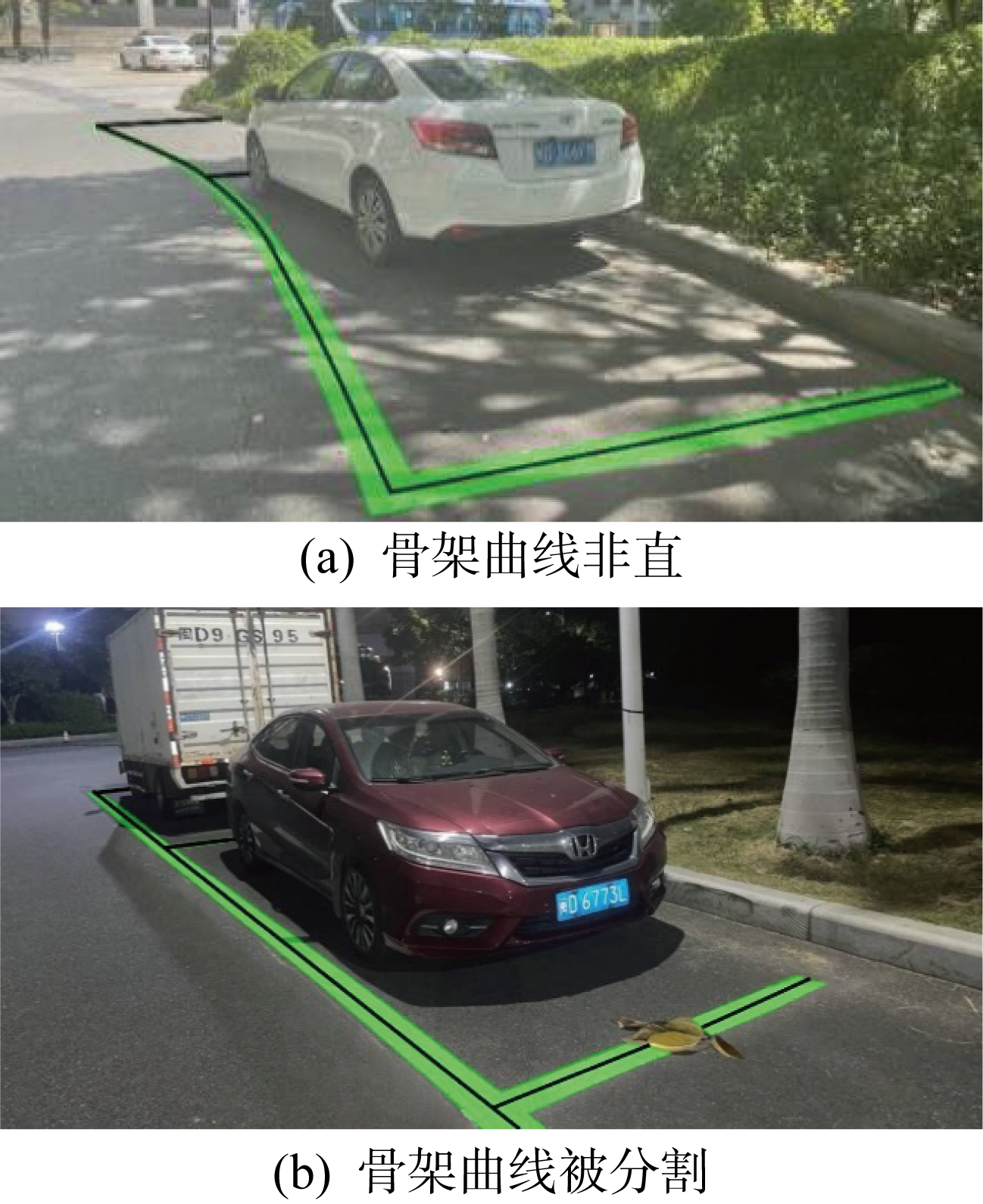
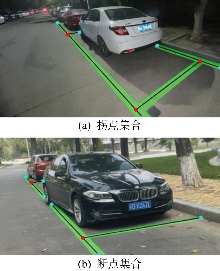
图7
骨架曲线拐点和断点搜索结果
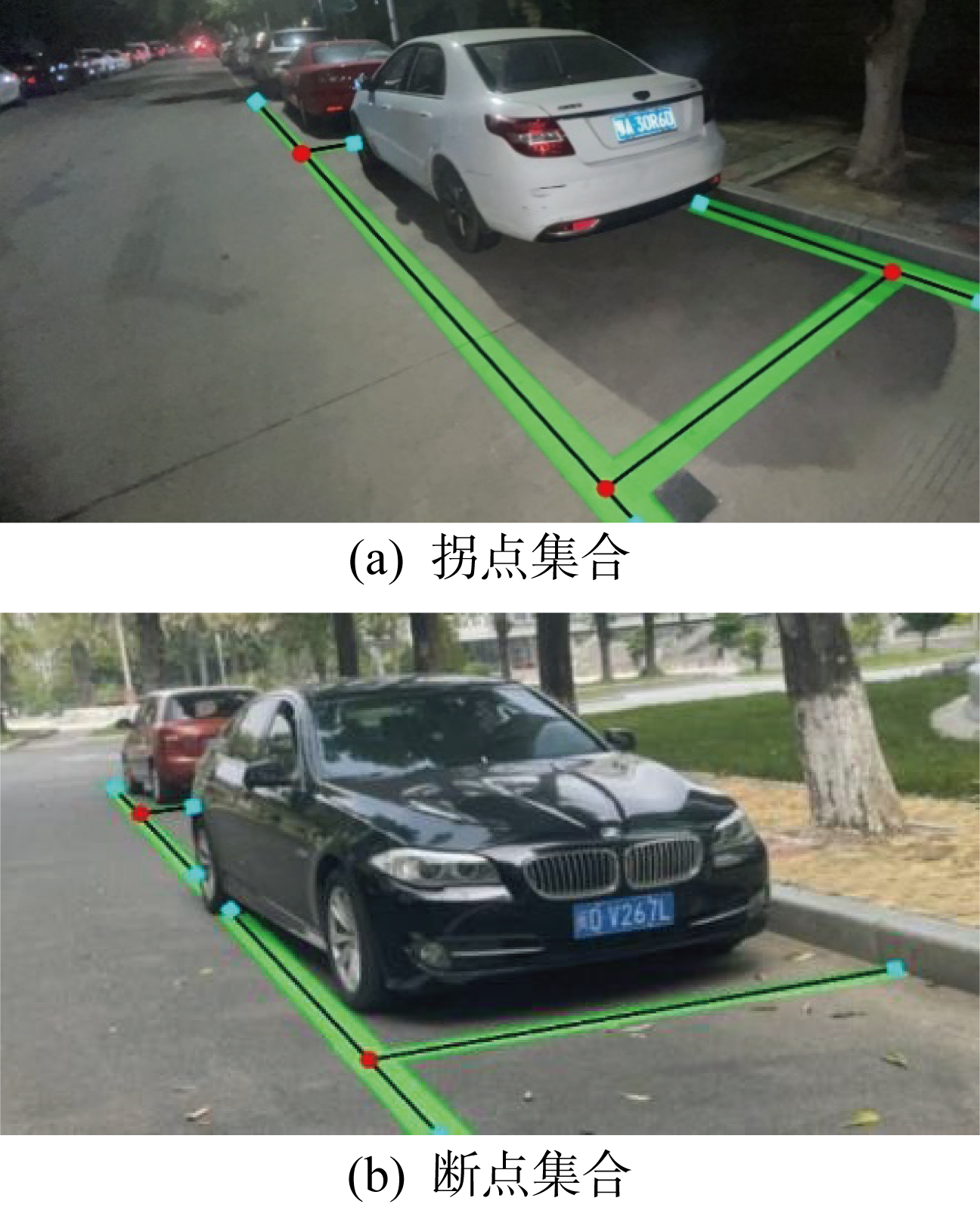

图8
不同摄像头位置和拍摄角度时的主车位


图9
主车位的多边形可视区域
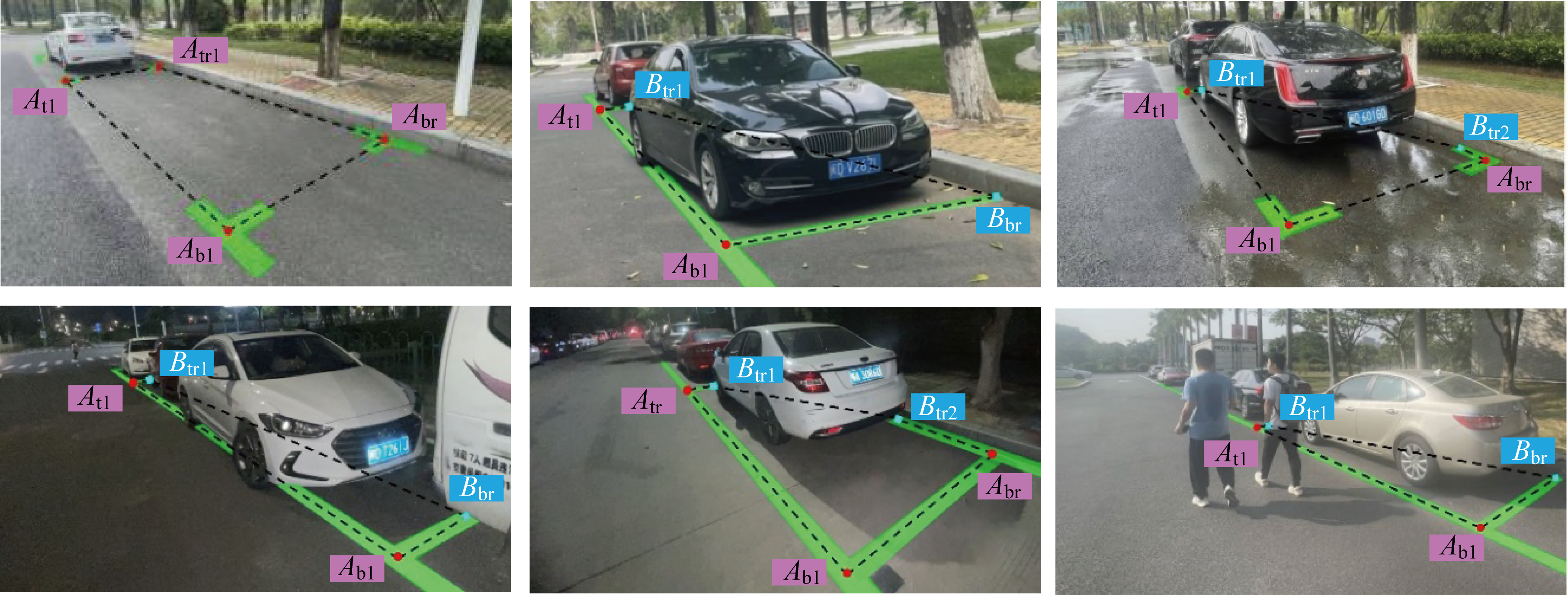
表3
违停检测算法测试结果
| 环境 | 类别 | 样本数 | 准确率/% |
|---|---|---|---|
| 白天、晴 | 规范停车 | 1457 | 98.8 |
| 不当停车 | 1315 | 97.4 | |
| 违法停车 | 1253 | 98.0 | |
| 合计 | 4025 | 98.1 | |
| 白天、雨 | 规范停车 | 1309 | 98.4 |
| 不当停车 | 1283 | 97.0 | |
| 违法停车 | 1390 | 97.7 | |
| 合计 | 3982 | 97.7 | |
| 夜间、晴 | 规范停车 | 1465 | 99.3 |
| 不当停车 | 1217 | 97.6 | |
| 违法停车 | 1219 | 98.8 | |
| 合计 | 3901 | 98.6 | |
| 夜间、雨 | 规范停车 | 1185 | 98.6 |
| 不当停车 | 1047 | 97.3 | |
| 违法停车 | 1346 | 98.1 | |
| 合计 | 3578 | 98.0 | |
| 总计 | 15486 | 98.1 | |
表4
3类常见干扰下算法测试效果
| 干扰类型 | 类别 | 样本数 | 准确率/% |
|---|---|---|---|
| 遮挡 | 规范停车 | 2246 | 97.2 |
| 不当停车 | 2170 | 97.0 | |
| 合计 | 4416 | 97.1 | |
| 破损 | 规范停车 | 1986 | 98.1 |
| 不当停车 | 2072 | 98.0 | |
| 合计 | 4058 | 98.0 | |
| 脏污 | 规范停车 | 1962 | 97.8 |
| 不当停车 | 1898 | 97.6 | |
| 合计 | 3860 | 97.7 | |
| 总计 | 12334 | 97.6 | |

图10
车辆违停检测结果举例
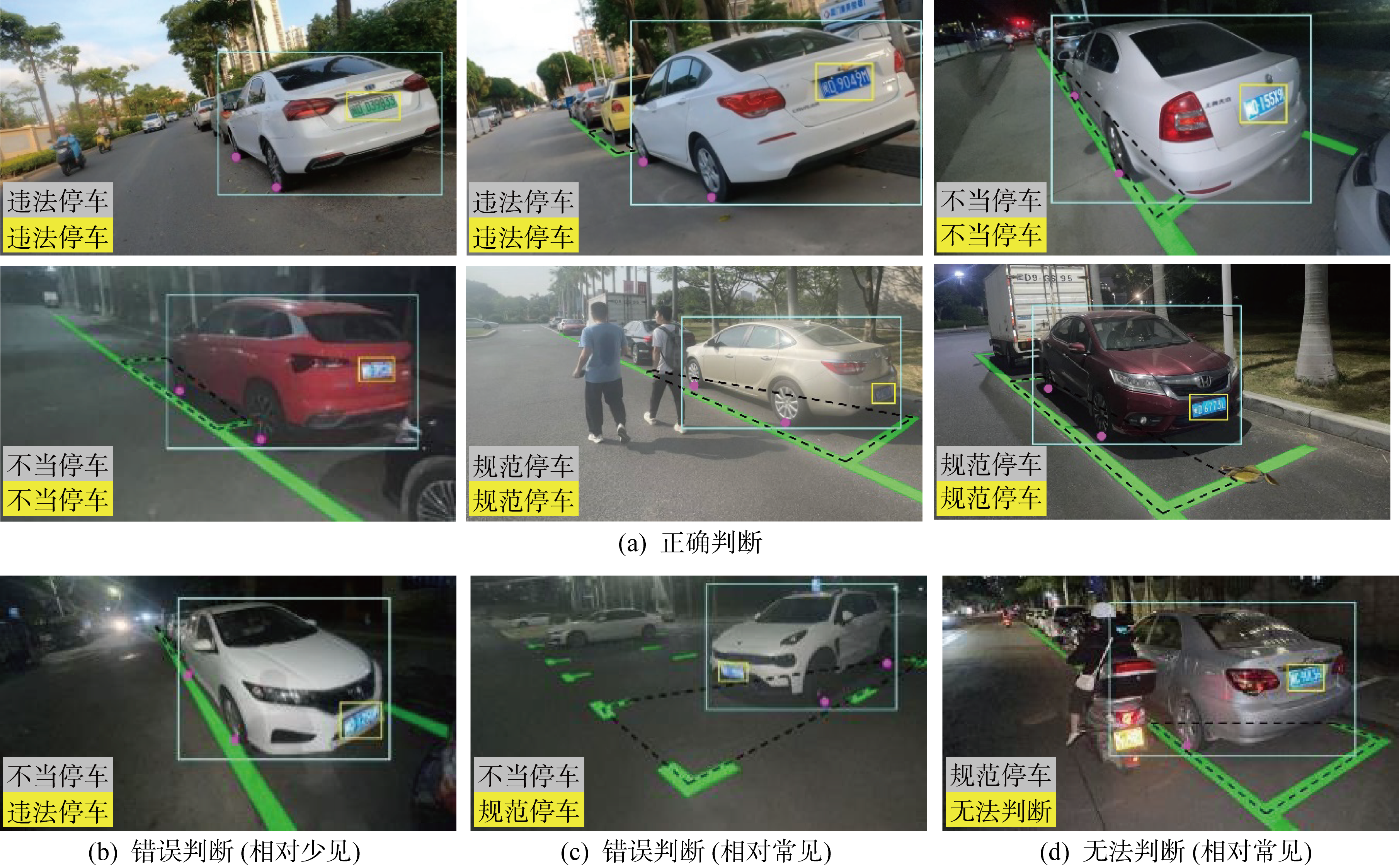
表5
各算法在不同数据集上的对比实验结果
| 算法 | XMUT-VPI | KITTI | Cityscapes | BDD100K | 平均帧率/ (帧·s-1) | 平均耗时/ (ms·帧-1) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 准确 率/% | 帧率/ (帧·s-1) | 准确 率/% | 帧率/ (帧·s-1) | 准确 率/% | 帧率/ (帧·s-1) | 准确 率/% | 帧率/ (帧·s-1) | ||||||
| YOLOv5+Transformer[ | 92.3 | 36.2 | 90.2 | 34.1 | 91.6 | 36.3 | 90.4 | 36.5 | 35.7 | 28.0 | |||
| PP-YOLOE+Transformer[ | 95.7 | 37.1 | 93.6 | 35.2 | 93.5 | 37.0 | 93.1 | 37.2 | 36.6 | 27.3 | |||
| YOLOv3+DeepLabv3+[ | 88.4 | 24.9 | 88.3 | 22.7 | 86.4 | 24.5 | 87.7 | 25.0 | 24.4 | 41.0 | |||
| PSPNet[ | 90.3 | 37.6 | 88.9 | 35.3 | 90.7 | 37.5 | 87.8 | 37.7 | 37.0 | 27.0 | |||
| YOLOv5+射线法[ | 86.7 | 49.5 | 85.5 | 47.5 | 84.9 | 49.6 | 84.5 | 49.5 | 49.0 | 20.4 | |||
| HOG+LBP+PCA+SVM[ | 87.2 | 54.7 | 85.4 | 52.7 | 84.6 | 54.9 | 85.1 | 54.8 | 54.2 | 18.5 | |||
| MTPN +Decoder | 98.1 | 42.3 | 97.5 | 40.2 | 96.7 | 42.2 | 97.2 | 42.5 | 41.8 | 23.9 | |||
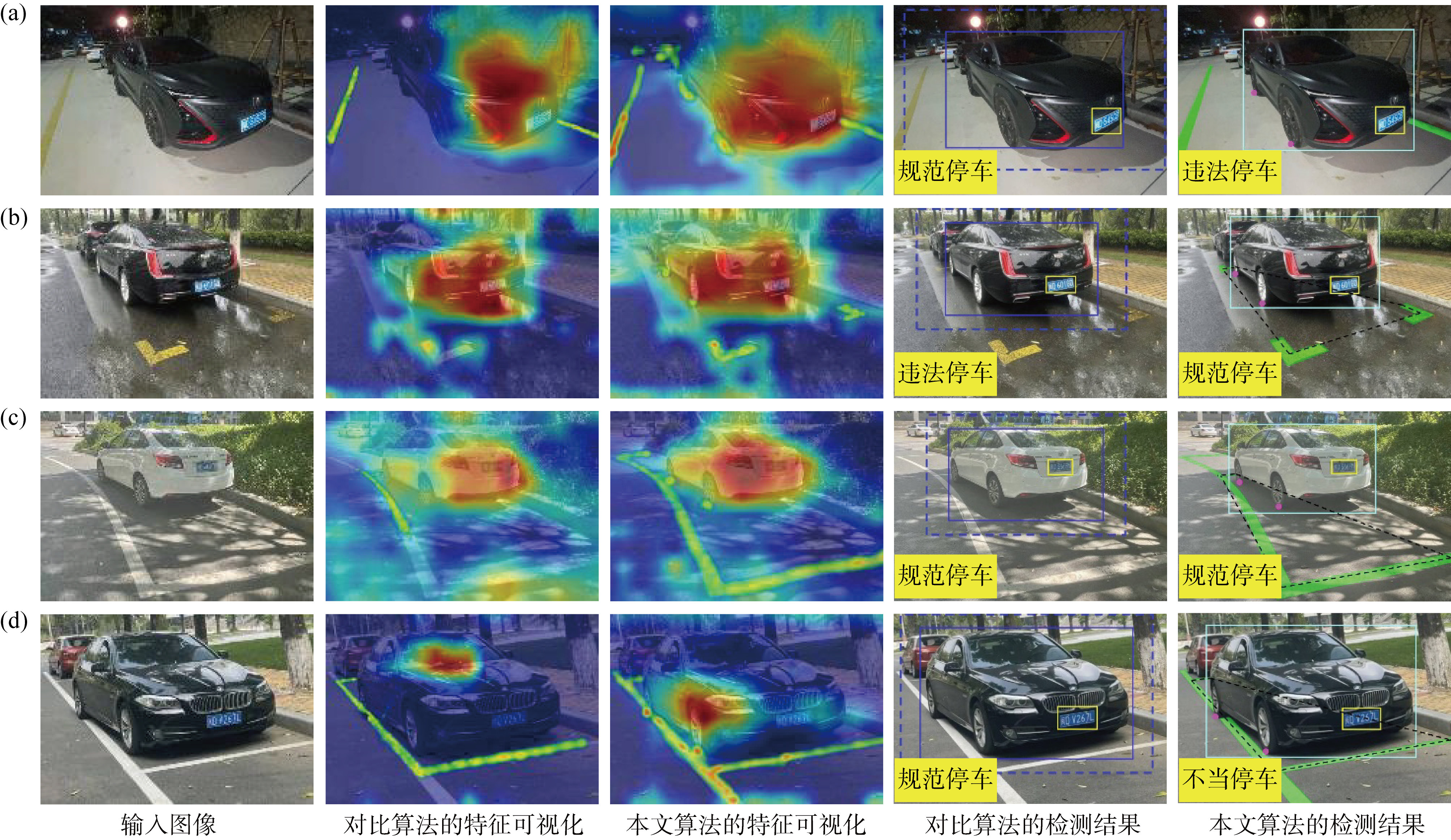
图11
本文算法与对比算法预测结果比较
| [1] | 田爱军, 蔡旭阳, 陈玮, 等. 无人机端路面车辆违停检测及取证系统[J]. 测控技术, 2021, 40(5): 67-74. |
| TIAN Aijun, CAI Xuyang, CHEN Wei, et al. Vehicle illegal parking detection and evidence collection system on UAV[J]. Measurement & Control Technology, 2021, 40(5): 67-74. | |
| [2] | TANG H R, PENG A M, ZHANG D M, et al. SSD real-time illegal parking detection based on contextual information transmission[J]. Computers, Materials & Continua, 2020, 62(1): 293-307. |
| [3] | PENG X G, SONG R, CAO Q, et al. Real-time illegal parking detection algorithm in urban environments[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(11): 20572-20587. |
| [4] | 吴志华. 基于深度学习的路侧车辆违停检测技术研究[D]. 厦门: 厦门理工学院, 2023. |
| WU Zhihua. Research of a deep learning-based illegal parking vehicle detection and license plate recognition algorithm[D]. Xiamen: Xiamen University of Technology, 2023. | |
| [5] | 赵逸如, 刘正熙, 熊运余, 等. 基于目标检测和语义分割的人行道违规停车检测[J]. 现代计算机, 2020(9): 82-88. |
| ZHAO Yiru, LIU Zhengxi, XIONG Yunyu, et al. Detection of illegal sidewalk parking based on object detection and semantic segmentation[J]. Modern Computer, 2020(9): 82-88. | |
| [6] | YANG Q, YU L F. Recognition of taxi violations based on semantic segmentation of PSPNet and improved YOLOv3[J]. Scientific Programming, 2021, 2021: 4520190. |
| [7] | LIANG X, WU Y, HAN J, et al. Effective adaptation in multi-task co-training for unified autonomous driving[J]. Advances in Neural Information Processing Systems, 2022, 35: 19645-19658. |
| [8] | GUO M H, LU C Z, LIU Z N, et al. Visual attention network[J]. Computational Visual Media, 2023, 9(4): 733-752. |
| [9] |
李擎, 皇甫玉彬, 李江昀, 等. UConvTrans: 全局和局部信息交互的双分支心脏图像分割[J]. 上海交通大学学报, 2023, 57(5): 570-581.
doi: 10.16183/j.cnki.jsjtu.2022.088 |
| LI Qing, HUANGPU Yubin, LI Jiangyun, et al. UConvTrans: A dual-flow cardiac image segmentation network by global and local information integration[J]. Journal of Shanghai Jiao Tong University, 2023, 57(5): 570-581. | |
| [10] | WANG C Y, BOCHKOVSKIY A, LIAO H Y M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors[C]// 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver, Canada: IEEE, 2023: 7464-7475. |
| [11] |
万安平, 杨洁, 缪徐, 等. 基于注意力机制与神经网络的热电联产锅炉负荷预测[J]. 上海交通大学学报, 2023, 57(3): 316-325.
doi: 10.16183/j.cnki.jsjtu.2021.346 |
| WAN Anping, YANG Jie, MIAO Xu, et al. Boiler load forecasting of CHP plant based on attention mechanism and deep neural network[J]. Journal of Shanghai Jiao Tong University, 2023, 57(3): 316-325. | |
| [12] | WANG W H, DAI J F, CHEN Z, et al. InternImage: Exploring large-scale vision foundation models with deformable convolutions[C]// 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver, Canada: IEEE, 2023: 14408-14419. |
| [13] | ZHANG X H, CHEN Y, ZHANG H F, et al. When visual disparity generation meets semantic segmentation: A mutual encouragement approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(3): 1853-1867. |
| [14] | FENG Z H, KITTLER J, AWAIS M, et al. Rectified wing loss for efficient and robust facial landmark localisation with convolutional neural networks[J]. International Journal of Computer Vision, 2020, 128(8): 2126-2145. |
| [15] | GE Z, LIU S T, WANG F, et al. YOLOX:Exceeding YOLO series in 2021[DB/OL]. (2021-07-18) [2023-11-01]. http://arxiv.org/abs/2107.08430. |
| [16] | CARION N, MASSA F, SYNNAEVE G, et al. End-to-end object detection with transformers[M]//Lecture notes in computer science. Cham: Springer International Publishing, 2020: 213-229. |
| [17] | SUN K, XIAO B, LIU D, et al. Deep high-resolution representation learning for human pose estimation[C]// 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Long Beach, USA: IEEE, 2019: 5686-5696. |
| [18] | XU Y F, ZHANG J, ZHANG Q M, et al. ViTPose: Simple vision transformer baselines for human pose estimation[DB/OL]. (2022-04-26) [2023-11-01]. http://arxiv.org/abs/2204.12484. |
| [19] | QIN X B, ZHANG Z C, HUANG C Y, et al. U2-Net: Going deeper with nested U-structure for salient object detection[J]. Pattern Recognition, 2020, 106: 107404. |
| [20] | YANG Z, PENG X B, YIN Z J, et al. Deeplab_v3_plus-net for image semantic segmentation with channel compression[C]// 2020 IEEE 20th International Conference on Communication Technology. Nanning, China: IEEE, 2020: 1320-1324. |
| [21] | LI H X, SU F L. A multi-target ISAR imaging method based on Zhang-Suen thinning and radon transform[C]// 2022 15th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics. Beijing, China: IEEE, 2022: 1-5. |
| [22] | GEIGER A, LENZ P, URTASUN R. Are we ready for autonomous driving? The KITTI vision benchmark suite[C]// 2012 IEEE Conference on Computer Vision and Pattern Recognition. Providence, USA: IEEE, 2012: 3354-3361. |
| [23] | CORDTS M, OMRAN M, RAMOS S, et al. The cityscapes dataset for semantic urban scene understanding[C]// 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, USA: IEEE, 2016: 3213-3223. |
| [24] | YU F, CHEN H F, WANG X, et al. BDD100K: A diverse driving dataset for heterogeneous multitask learning[C]// 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Seattle, USA: IEEE, 2020: 2633-2642. |
| [25] | 庄建军, 徐子恒, 张若愚. 基于改进的YOLOv5模型和射线法的车辆违停检测[J]. 南京信息工程大学学报, 2024, 16(3): 341-351. |
| ZHUANG Jianjun, XU Ziheng, ZHANG Ruoyu. Vehicle violation detection based on improved YOLOv5 model and radiometric method[J]. Journal of Nanjing University of Information Science & Technology, 2024, 16(3): 341-351. | |
| [26] | 邵怡文. 基于图像处理技术的违法车辆自动检测系统的优化研究[D]. 青岛: 青岛理工大学, 2021. |
| SHAO Yiwen. Research on optimization of automatic detection system of illegal vehicles based on image processing technology[D]. Qingdao: Qingdao University of Science and Technology, 2021. |
| [1] | . 基于改进CLRNet的铁轨线检测算法[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(5): 923-934. |
| [2] | . MAGPNet: 基于多域注意力引导的红外弱小目标检测网络[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(5): 935-951. |
| [3] | . 基于CEEMDAN 和 GRU的停车位预测[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(5): 962-975. |
| [4] | . 面向太阳能电池复杂缺陷检测的新型多步深度学习方法[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(5): 1050-1064. |
| [5] | . 基于ALBERT的中国诗酒文化命名实体识别[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(5): 1065-1072. |
| [6] | 许强, 马跃华, 许可, 潘俊. 雷达目标智能识别方法研究综述[J]. 空天防御, 2025, 8(5): 1-9. |
| [7] | 夏伊琳, 刘刚, 鄢丛强, 蔡云泽. 基于深度学习的SAR图像舰船尾迹旋转框检测算法研究[J]. 空天防御, 2025, 8(5): 64-74. |
| [8] | 梁煜婉, 肖朝昀, 李明广, 孟江山, 周建烽, 黄山景, 朱浩杰. 基于长短时记忆的真空预压地基沉降预测[J]. 上海交通大学学报, 2025, 59(4): 525-532. |
| [9] | 赵紫昱, 王绪泉, 马杰, 邢裕杰, 顿雄, 王占山, 程鑫彬. 轻薄红外计算成像重建算法的边缘芯片部署方法研究[J]. 空天防御, 2025, 8(4): 85-93. |
| [10] | 薛昂, 姜恩宇, 张文涛, 林顺富, 米阳. 基于窗口自注意力网络与YOLOv5融合的输电线路通道异物检测[J]. 上海交通大学学报, 2025, 59(3): 413-423. |
| [11] | . 用于内窥镜图像息肉检测的实时轻量级卷积神经网络[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(3): 521-534. |
| [12] | . 基于双流自编码器的无监督动作识别[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(2): 330-336. |
| [13] | . 基于RGB-D图像的机器人抓取检测高效全卷积网络和优化方法[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(2): 399-416. |
| [14] | 徐旺旺1,2,许良凤1,2,刘宁徽3,律娜3. 基于多注意力卷积神经网络的乳腺癌组织学图像诊断[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(1): 91-106. |
| [15] | Sahaya Anselin Nisha1, NARMADHA R.1, AMIRTHALAKSHMI T. M.2, BALAMURUGAN V.1, VEDANARAYANAN V.1. LOBO优化的深度卷积神经网络用于脑肿瘤分类[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(1): 107-114. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||