上海交通大学学报 ›› 2022, Vol. 56 ›› Issue (8): 1024-1033.doi: 10.16183/j.cnki.jsjtu.2021.154
所属专题: 《上海交通大学学报》2022年“机械与动力工程”专题
黄宇昊1, 韩超1, 赵明辉2, 杜乾坤1, 王石刚1( )
)
收稿日期:2021-05-06
出版日期:2022-08-28
发布日期:2022-08-26
通讯作者:
王石刚
E-mail:wangshigang@sjtu.edu.cn
作者简介:黄宇昊(1998-),男,江西省抚州市人,硕士生,主要从事无人机自主导航技术研究.
HUANG Yuhao1, HAN Chao1, ZHAO Minghui2, DU Qiankun1, WANG Shigang1()
Received:2021-05-06
Online:2022-08-28
Published:2022-08-26
Contact:
WANG Shigang
E-mail:wangshigang@sjtu.edu.cn
摘要:
针对无人机在复杂环境下难以规划出兼顾平滑性和安全性等指标的时域连续轨迹问题,基于安全飞行通道提出了一种多目标轨迹规划算法.在基于快速拓展随机树(RRT)改进的RRT*算法生成的初始离散路径点基础上,建立以凸多面体集合表示的安全飞行通道;根据轨迹在安全飞行通道内部的约束建立安全项目标函数,结合飞行平滑性、动力学特性、飞行时间等性能指标,建立加权多目标优化函数;采用基于梯度下降的凸优化算法,对离散路径点的位置、速度、加速度及轨迹的时间分配进行优化,生成分段多项式表示的时域连续轨迹.基于煤矿井下等复杂环境对算法的有效性及相关性能进行试验及对比验证,结果表明:相比现有算法,本文算法在综合性能上有一定的提升.
中图分类号:
黄宇昊, 韩超, 赵明辉, 杜乾坤, 王石刚. 考虑安全飞行通道约束的无人机飞行轨迹多目标优化策略[J]. 上海交通大学学报, 2022, 56(8): 1024-1033.
HUANG Yuhao, HAN Chao, ZHAO Minghui, DU Qiankun, WANG Shigang. Multi-Objective Optimization Strategy of Trajectory Planning for Unmanned Aerial Vehicles Considering Constraints of Safe Flight Corridors[J]. Journal of Shanghai Jiao Tong University, 2022, 56(8): 1024-1033.

图1
分段多项式轨迹
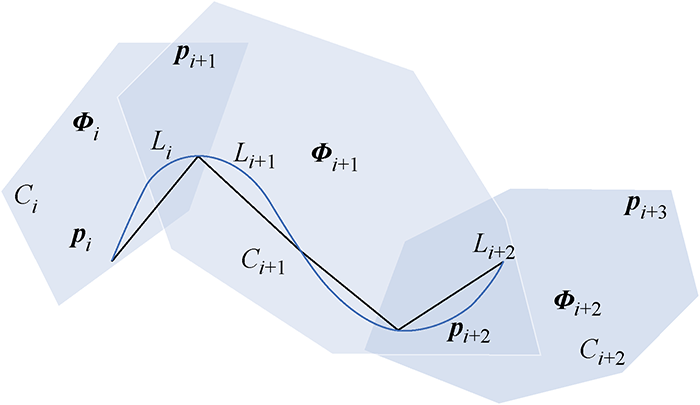

图2
RRT*算法重选父节点过程
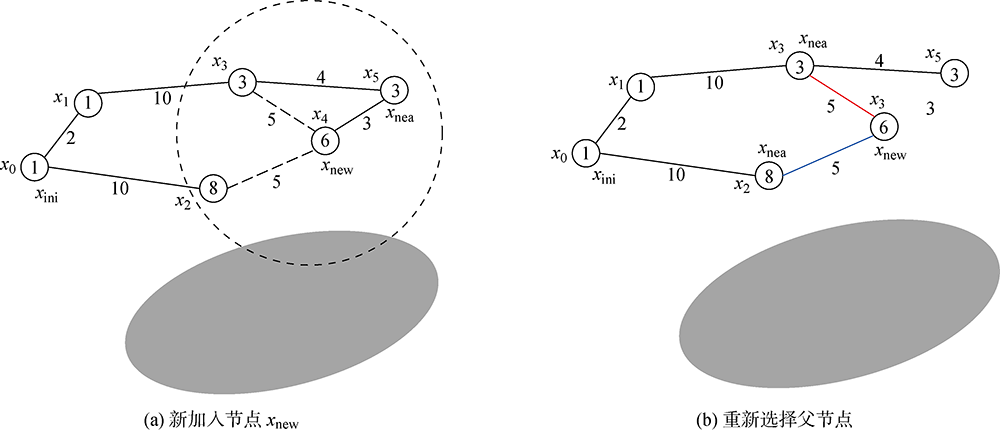
图3
安全通道构造
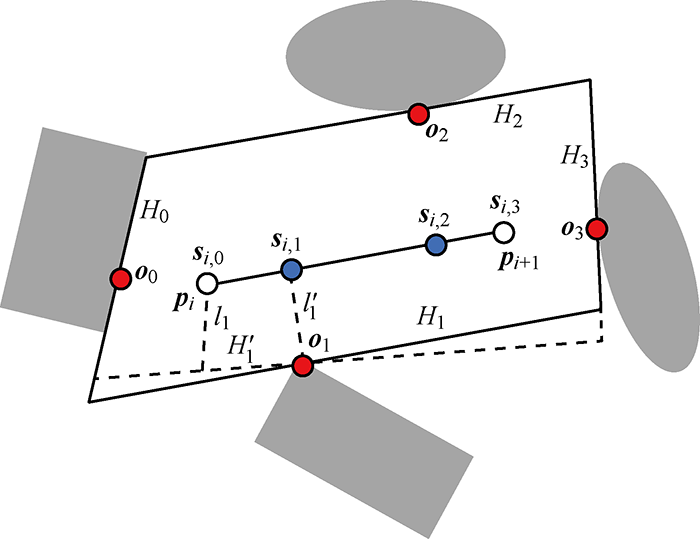
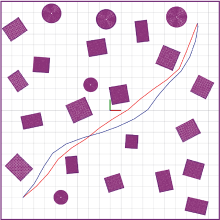
图4
RRT*算法生成的初始路径
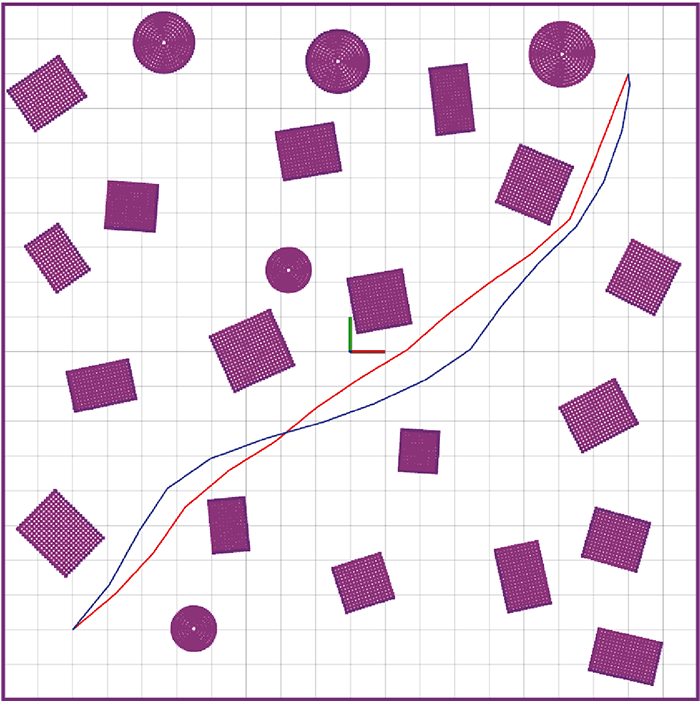

图5
两种代价函数生成的初始路径对比
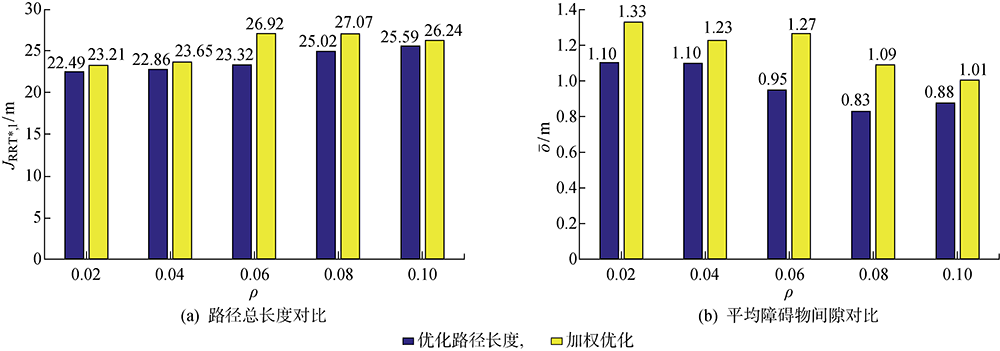

图6
障碍物密度为0.08时两种算法构建的安全飞行通道
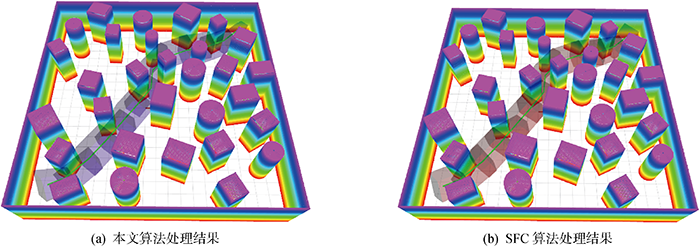
表1
不同障碍物密度下SFC与所提算法的性能对比
| ρ | 本文算法 | SFC算法 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| | omin/m | | tu/s | | omin/m | | tu/s | ||
| 0.02 | 1.286 | 0.510 | 0.397 | 1.137 | 1.302 | 0.473 | 0.363 | 1.190 | |
| 0.04 | 1.048 | 0.555 | 0.530 | 1.214 | 1.069 | 0.454 | 0.425 | 1.320 | |
| 0.06 | 1.059 | 0.528 | 0.499 | 1.540 | 1.085 | 0.446 | 0.411 | 1.756 | |
| 0.08 | 0.837 | 0.461 | 0.551 | 1.912 | 0.867 | 0.342 | 0.394 | 2.665 | |
| 0.10 | 0.781 | 0.462 | 0.592 | 1.994 | 0.802 | 0.359 | 0.448 | 2.355 | |
| 平均值 | 1.002 | 0.503 | 0.513 | 1.559 | 1.025 | 0.415 | 0.408 | 1.857 | |
表2
通过安全飞行通道计算障碍物间隙及梯度的结果
| pT/m | 安全飞行通道计算结果 | 栅格地图计算结果 | |||
|---|---|---|---|---|---|
| omin/m | g | omin/m | g | ||
| (-7.34,-6.02, 2.00) | 1.15 | (-0.22,-0.98, 0.00) | 1.16 | (-0.18,-0.98, 0.00) | |
| (-3.20,-1.51, 1.65) | 0.54 | (0.08, 0.99,-0.04) | 0.63 | (-0.31, 0.95, 0.00) | |
| (1.02,-1.29, 1.18) | 0.93 | (0.98,-0.22, 0.05) | 0.94 | (0.97,-0.21, 0.01) | |
| (4.28, 1.19, 1.09) | 0.90 | (-0.51, 0.86, 0.03) | 0.92 | (-0.49, 0.87, 0.01) | |

图7
两种算法轨迹规划效果

表3
轨迹规划算法性能对比
| 地图类型 | 本文算法 | GTOP算法 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Js/(m2·s-5) | | tw/s | lw/m | Js/(m2·s-5) | | tw/s | lw/m | ||
| 随机地图 | 69.106 | 1.063 | 21.514 | 23.690 | 108.871 | 1.011 | 29.714 | 23.714 | |
| 走廊地图 | 368.889 | 0.775 | 76.659 | 69.231 | 624.186 | 0.738 | 86.244 | 69.432 | |
| 矿井地图 | 309.090 | 2.157 | 59.893 | 56.435 | 337.129 | 2.139 | 70.404 | 56.948 | |
| [1] | ZHOU Y, RUI T, LI Y R, et al. A UAV patrol system using panoramic stitching and object detection[J]. Computers & Electrical Engineering, 2019, 80: 106473. |
| [2] |
MANSOURI S S, KANELLAKIS C, KOMINIAK D, et al. Deploying MAVs for autonomous navigation in dark underground mine environments[J]. Robotics and Autonomous Systems, 2020, 126: 103472.
doi: 10.1016/j.robot.2020.103472 URL |
| [3] | 赵建霞, 段海滨, 赵彦杰, 等. 基于鸽群层级交互的有人/无人机集群一致性控制[J]. 上海交通大学学报, 2020, 54(9): 973-980. |
| ZHAO Jianxia, DUAN Haibin, ZHAO Yanjie, et al. Consensus control of manned-unmanned aerial vehicle swarm based on hierarchy interaction of pigeons[J]. Journal of Shanghai Jiao Tong University, 2020, 54(9): 973-980. | |
| [4] | CHANDLER B, GOODRICH M A. Online RRT and online FMT: Rapid replanning with dynamic cost[C]// 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vancouver, Canada: IEEE, 2017: 6313-6318. |
| [5] | CAI Y Z, XI Q B, XING X J, et al. Path planning for UAV tracking target based on improved A-star algorithm[C]// 2019 1st International Conference on Industrial Artificial Intelligence. Shenyang, China: IEEE, 2019: 1-6. |
| [6] | 郝钏钏, 方舟, 李平. 基于Q学习的无人机三维航迹规划算法[J]. 上海交通大学学报, 2012, 46(12): 1931-1935. |
| HAO Chuanchuan, FANG Zhou, LI Ping. A 3-D route planning algorithm for unmanned aerial vehicle based on Q-learning[J]. Journal of Shanghai Jiao Tong University, 2012, 46(12): 1931-1935. | |
| [7] | CHEN J, LIU T B, SHEN S J. Online generation of collision-free trajectories for quadrotor flight in unknown cluttered environments[C]// 2016 IEEE International Conference on Robotics and Automation. Stockholm, Sweden: IEEE, 2016: 1476-1483. |
| [8] |
LIU S K, WATTERSON M, MOHTA K, et al. Planning dynamically feasible trajectories for quadrotors using safe flight corridors in 3-D complex environments[J]. IEEE Robotics and Automation Letters, 2017, 2(3): 1688-1695.
doi: 10.1109/LRA.2017.2663526 URL |
| [9] | STOICAN F, PRODAN I, POPESCU D, et al. Constrained trajectory generation for UAV systems using a B-spline parametrization[C]// 2017 25th Mediterranean Conference on Control and Automation. Valletta, Malta: IEEE, 2017: 613-618. |
| [10] |
SATAI H A, ZAHRA M M A, RASOOL Z I, et al. Bézier curves-based optimal trajectory design for multirotor UAVs with any-angle pathfinding algorithms[J]. Sensors, 2021, 21(7): 2460.
doi: 10.3390/s21072460 URL |
| [11] | RICHTER C, BRY A, ROY N. Polynomial trajectory planning for aggressive quadrotor flight in dense indoor environments[M]. New York, NY, USA: Springer, 2016: 649-666. |
| [12] | INGERSOLL B T, INGERSOLL J K, DEFRANCO P, et al. UAV path-planning using bezier curves and a receding horizon approach[C]// AIAA Modeling and Simulation Technologies Conference. Reston, Virginia: AIAA, 2016: 3675. |
| [13] | LOPEZ B T, HOW J P. Aggressive 3-D collision avoidance for high-speed navigation[C]// 2017 IEEE International Conference on Robotics and Automation. Singapore: IEEE, 2017: 5759-5765. |
| [14] | MELLINGER D, KUMAR V. Minimum snap trajectory generation and control for quadrotors[C]// 2011 IEEE International Conference on Robotics and Automation. Shanghai, China: IEEE, 2011: 2520-2525. |
| [15] | OLEYNIKOVA H, BURRI M, TAYLOR Z, et al. Continuous-time trajectory optimization for online UAV replanning[C]// 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems. Daejeon, South Korea: IEEE, 2016: 5332-5339. |
| [16] | GAO F, LIN Y, SHEN S J. Gradient-based online safe trajectory generation for quadrotor flight in complex environments[C]// 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vancouver, Canda: IEEE, 2017: 3681-3688. |
| [17] |
HORNUNG A, WURM K M, BENNEWITZ M, et al. OctoMap: An efficient probabilistic 3D mapping framework based on octrees[J]. Autonomous Robots, 2013, 34(3): 189-206.
doi: 10.1007/s10514-012-9321-0 URL |
| [18] |
SVANBERG K. A class of globally convergent optimization methods based on conservative convex separable approximations[J]. SIAM Journal on Optimization, 2002, 12(2): 555-573.
doi: 10.1137/S1052623499362822 URL |
| [1] | 楼佳辉, 黄文焘, 杨欢红, 余墨多, 杨亚宇. 港口电动岸桥运行轨迹规划及其路径功率优化控制[J]. 上海交通大学学报, 2026, 60(2): 300-310. |
| [2] | 夏筱彦, 张宇, 胡锡坤, 钟平. 基于扩散模型的无人机遥感目标检测物理对抗攻击方法研究[J]. 空天防御, 2026, 9(1): 52-62. |
| [3] | . 合成数据驱动的无人机检测与分类多任务框架[J]. J Shanghai Jiaotong Univ Sci, 2026, 31(1): 209-220. |
| [4] | 崔思远, 李浩, 范翔宇, 倪磊, 侯佳航. 基于AMDE-DMPC算法的多无人机协同目标搜索方法[J]. 空天防御, 2025, 8(6): 35-44. |
| [5] | . 无人机协助和用户协作的非线性能量收集移动边缘计算系统资源分配方法[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(6): 1220-1231. |
| [6] | 王志博, 呼卫军, 马先龙, 全家乐, 周皓宇. 感知驱动控制的无人机拦截碰撞技术[J]. 空天防御, 2025, 8(4): 78-84. |
| [7] | 葛鲁亲, 丁士洲, 姚强, 张诚, 黄雨辰. 无人机抗电磁干扰机理与抗干扰技术研究综述[J]. 空天防御, 2025, 8(4): 51-55. |
| [8] | 李奕佳, 李嘉诺, 柯良军. 基于强化学习的无人机协作防守策略设计与验证[J]. 空天防御, 2025, 8(3): 73-85. |
| [9] | 孙亮, 王明宇, 周素华, 雷荣强. 重点城市要点防卫小型无人机袭扰作战问题研究[J]. 空天防御, 2025, 8(2): 112-117. |
| [10] | 宋瑞, 张刚, 刘斯禹, 王世超, 秦佳星, 杨艺. 多临近空间飞行器滑翔段协同轨迹规划方法[J]. 空天防御, 2025, 8(2): 66-76. |
| [11] | 李书恒, 何德峰, 廖飞, 穆建彬. 基于非线性前馈补偿的六旋翼无人机姿态稳定反步控制[J]. 上海交通大学学报, 2025, 59(12): 1891-1900. |
| [12] | 李楚晨, 唐善军, 赵冰青. 一种基于无人机探测图像区块信息的弱小目标检测算法[J]. 空天防御, 2025, 8(1): 41-47. |
| [13] | 何通, 韦亚利, 卢青, 毕千. 无人机群协同侦察多点目标路径规划与控制[J]. 空天防御, 2025, 8(1): 31-40. |
| [14] | 吴桐, 亓统帅, 谢伟朋. 无人机集群反制技术研究[J]. 空天防御, 2025, 8(1): 17-23. |
| [15] | 赵钱, 赵炜, 王航, 朱玉虎, 孔晓俊. 美军有人/无人机协同作战项目介绍及发展趋势研判[J]. 空天防御, 2025, 8(1): 24-30. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||