上海交通大学学报 ›› 2024, Vol. 58 ›› Issue (11): 1816-1825.doi: 10.16183/j.cnki.jsjtu.2024.206
章涛1, 张雪瑞1, 陈勇2, 钟科林2, 罗其俊1( )
)
收稿日期:2024-06-06
修回日期:2024-06-27
接受日期:2024-07-21
出版日期:2024-11-28
发布日期:2024-12-02
通讯作者:
罗其俊,副教授;E-mail:作者简介:章 涛(1980—),教授,主要从事先进航空电子技术研究.
基金资助:
ZHANG Tao1, ZHANG Xuerui1, CHEN Yong2, ZHONG Kelin2, LUO Qijun1()
Received:2024-06-06
Revised:2024-06-27
Accepted:2024-07-21
Online:2024-11-28
Published:2024-12-02
摘要:
民航飞机视觉辅助驾驶系统通过机载视觉传感器获取周边威胁态势信息,为飞行员提供辅助决策等信息,但是机载视觉传感器获取的机场场面威胁目标尺度变化大,且机载平台算力有限,现有的目标检测方法难以满足视觉辅助驾驶需求.针对上述问题,提出一种基于YOLOv5s算法的轻量化多尺度目标检测算法.首先,为增强场面小目标的特征表达,在加权双向特征金字塔网络(BIFPN)基础上,引入坐标注意力(CA)机制,设计CA-BIFPN特征融合网络,提高模型对多种尺度目标的学习能力.然后,设计GSConv解耦检测头,相互独立优化分类和回归目标,提高目标检测的精度.设计的跨级部分网络轻量化颈部模块可减少因引入解耦头增加的参数量,大幅提高整体网络的检测速度,实现场面目标实时检测.为了验证算法性能,构建机载视觉传感器滑行视角的实测数据、仿真数据组成的多尺度场面目标数据集.在该数据集上的实验结果表明,所提方法检测精度超过Faster R-CNN、SSD和YOLOv6、YOLOv7、YOLOX等经典多尺度目标检测算法,均值平均精度为71.40%,比YOLOv5s提高4.19个百分点;在机载计算仿真实验平台上,检测帧率达到71帧/s,满足实时检测要求.
中图分类号:
章涛, 张雪瑞, 陈勇, 钟科林, 罗其俊. 面向民机可视导航的场面多尺度目标检测[J]. 上海交通大学学报, 2024, 58(11): 1816-1825.
ZHANG Tao, ZHANG Xuerui, CHEN Yong, ZHONG Kelin, LUO Qijun. Airfield Multi-Scale Object Detection for Visual Navigation in Civil Aircraft[J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1816-1825.
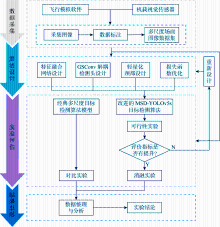
图1
研究思路及实验流程
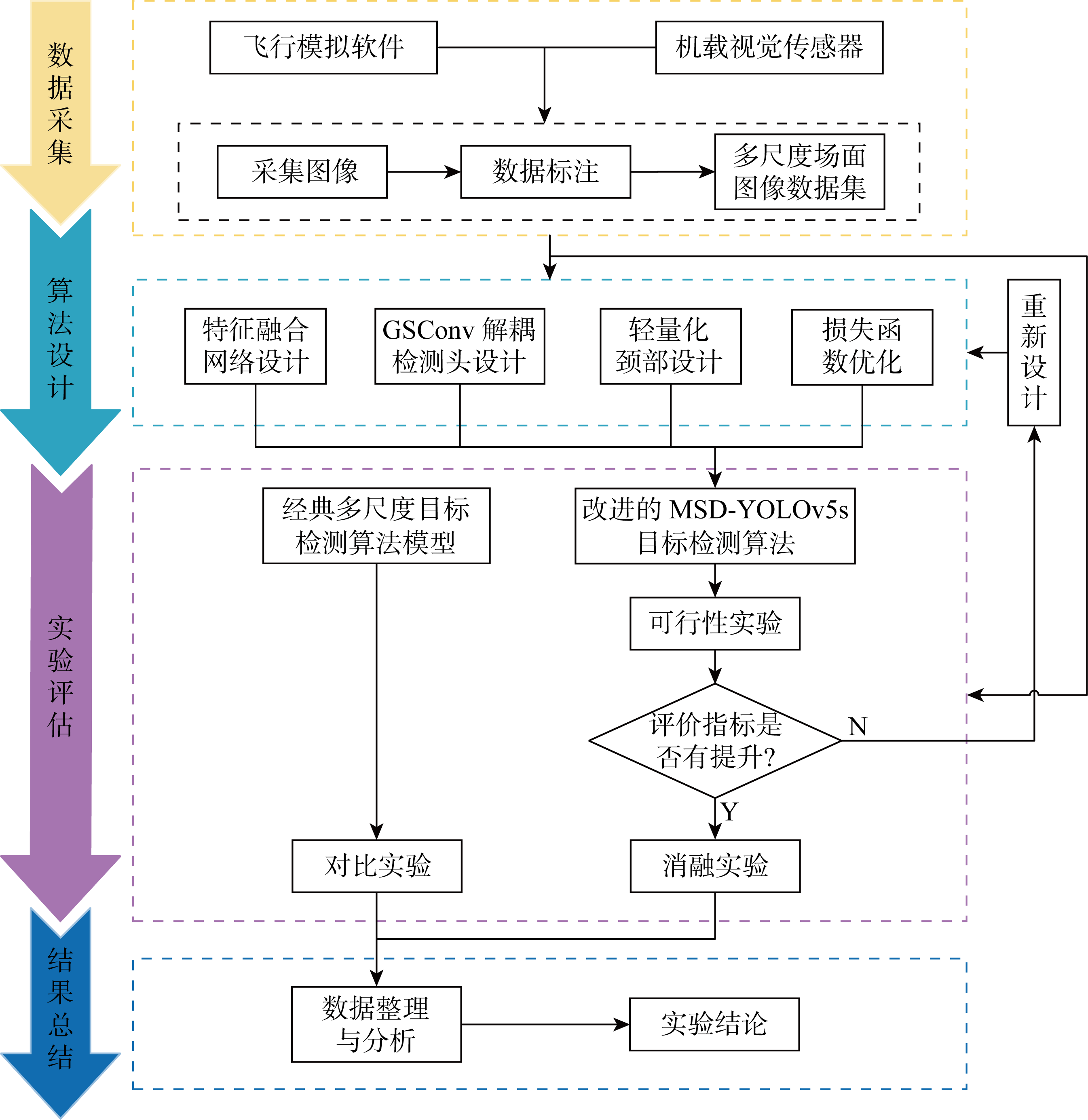
图2
所提MSD-YOLOv5s网络结构
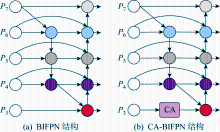
图3
特征融合网络结构
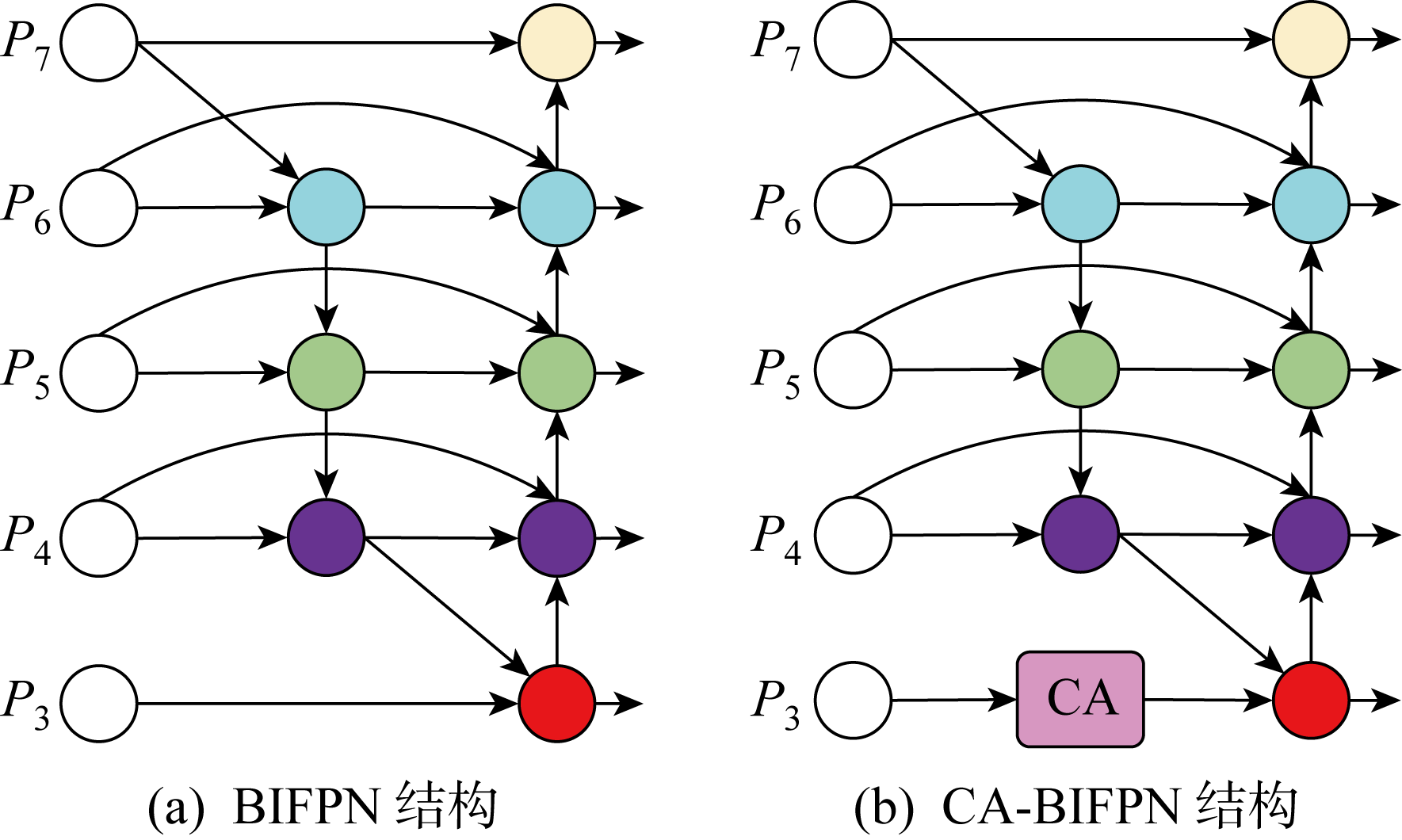
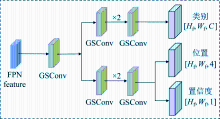
图4
GSConv解耦检测头
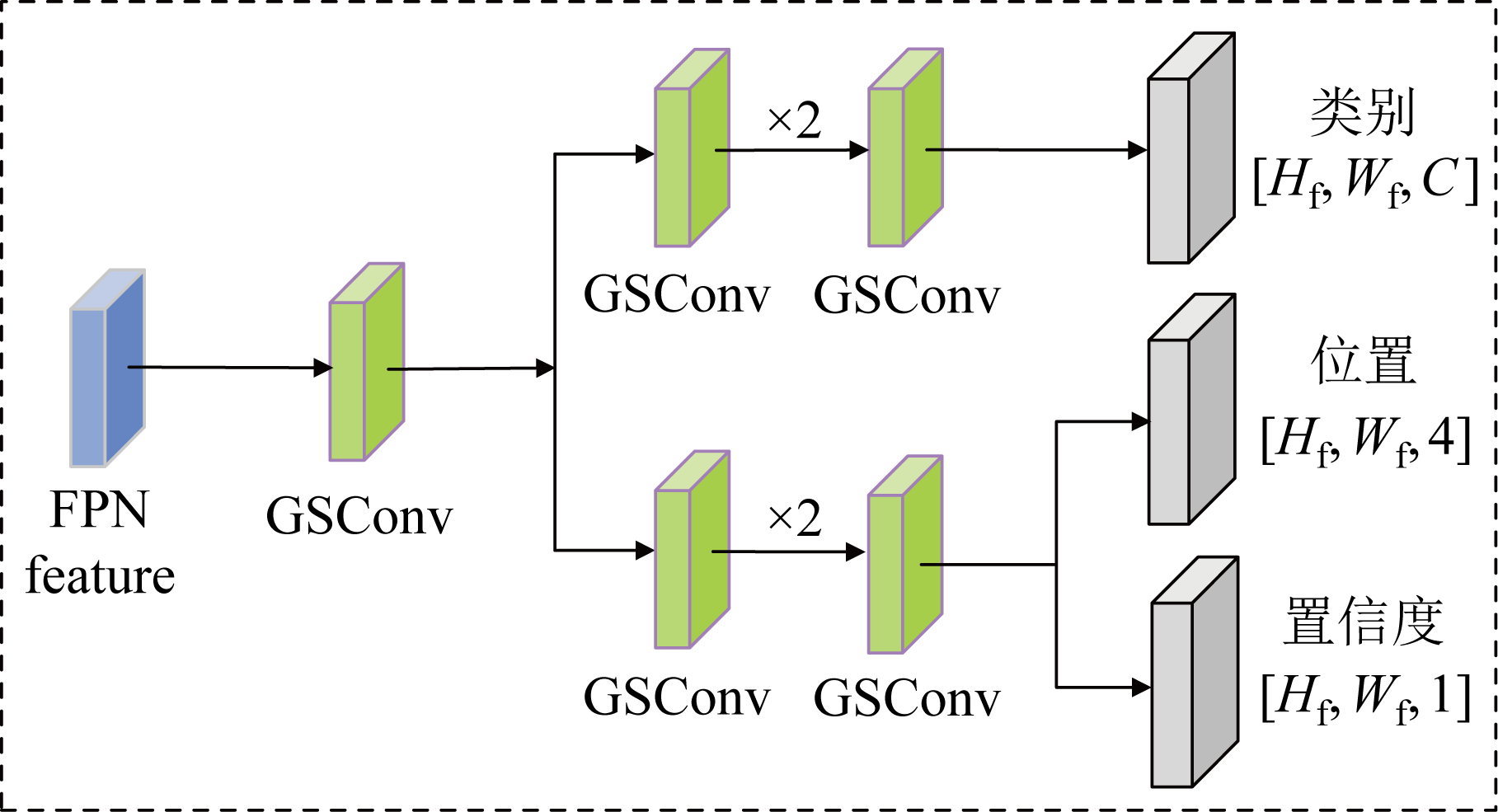
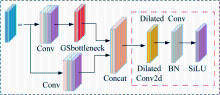
图5
空洞卷积VoV-GSCSP模块
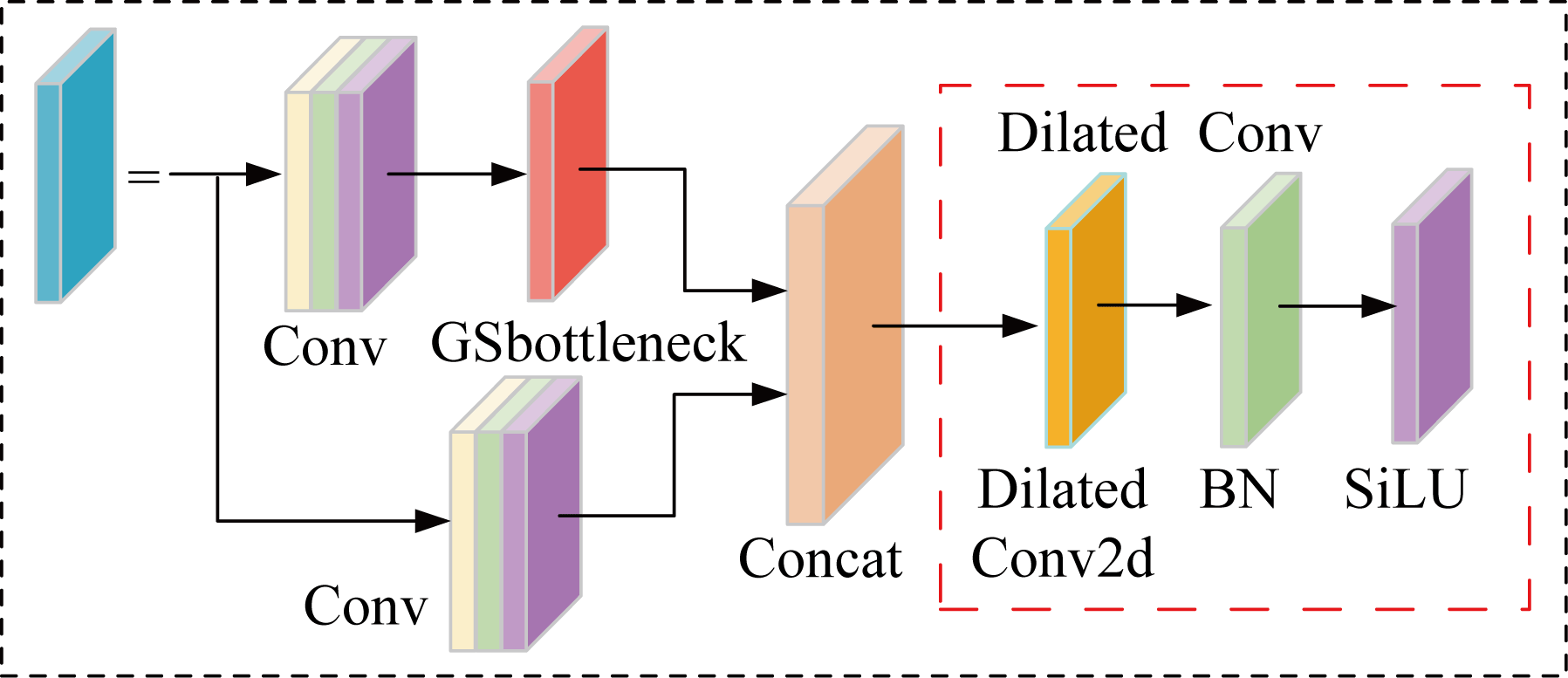
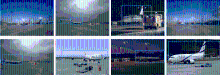
图6
机场场面目标数据集的典型图像和标注示例
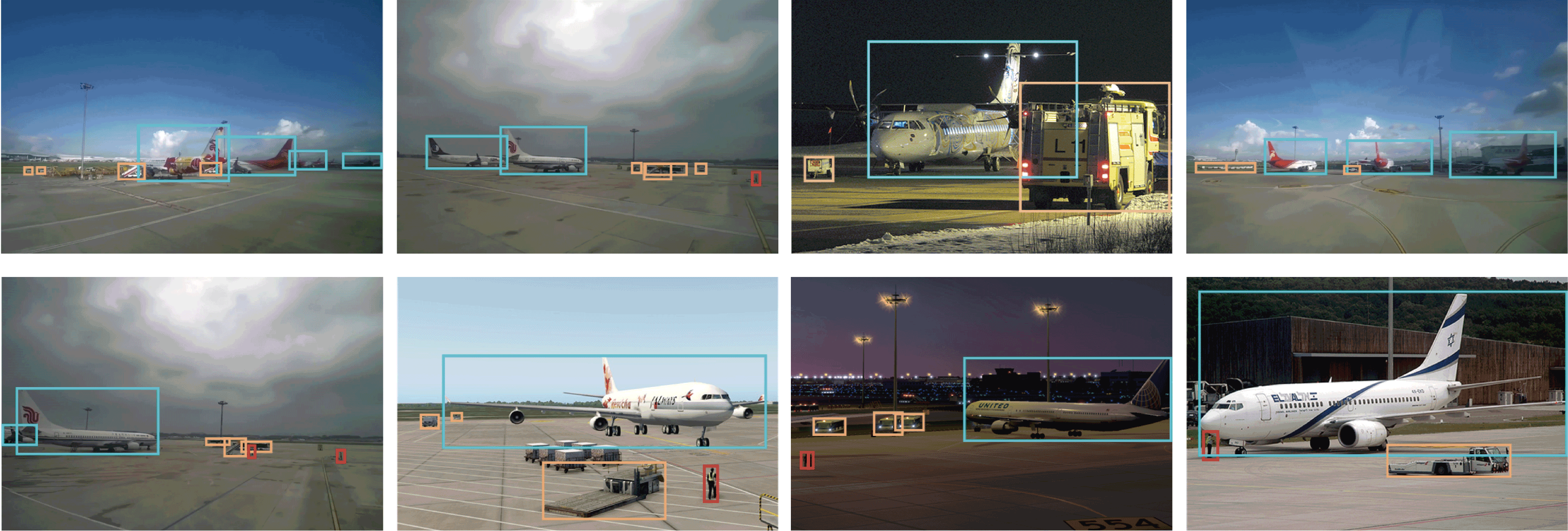
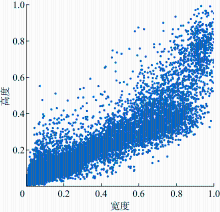
图7
自建数据集目标尺寸归一化分布
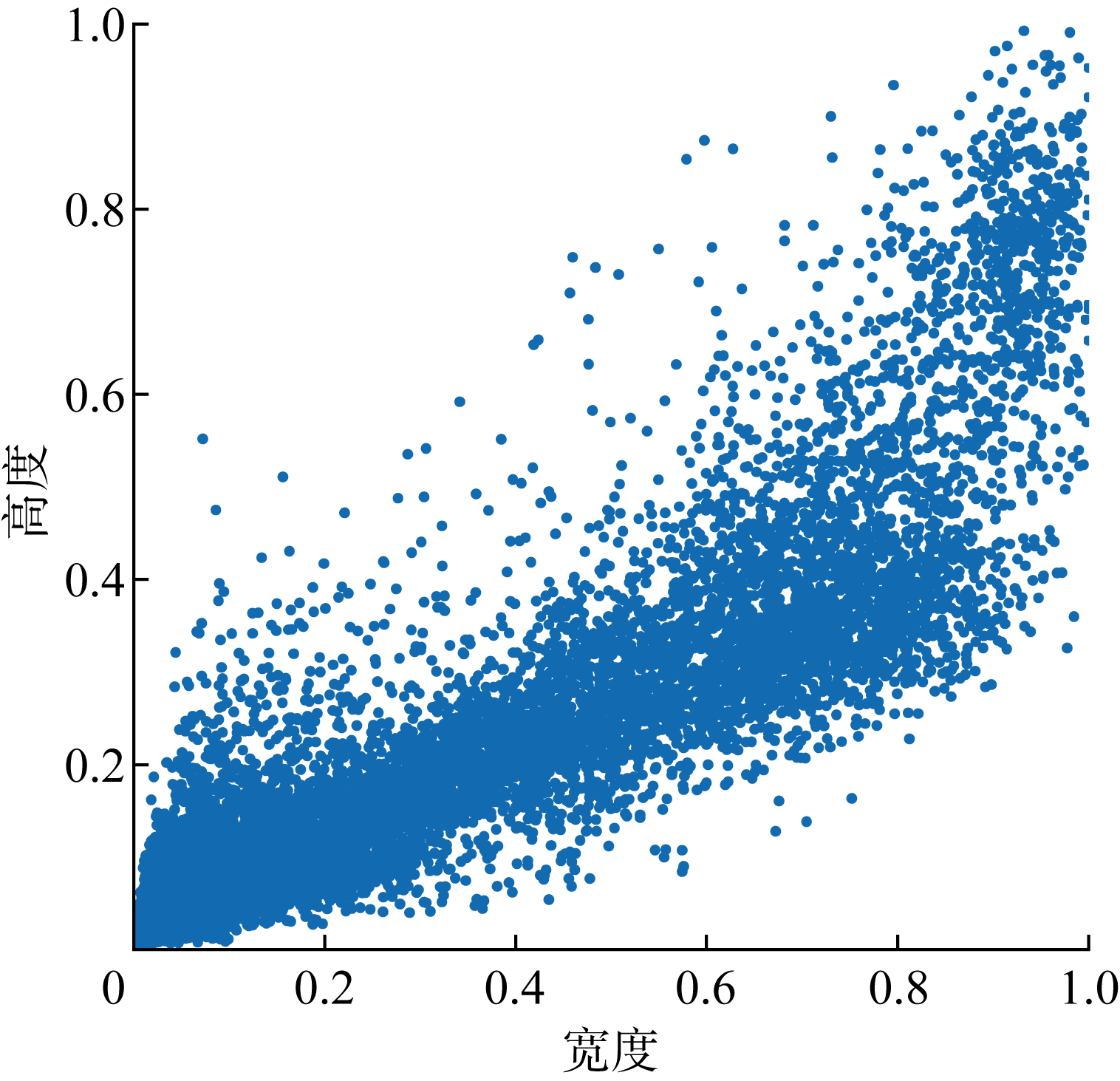
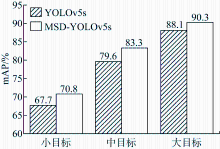
图8
YOLOv5s与MSD-YOLOv5s不同尺度目标检测对比
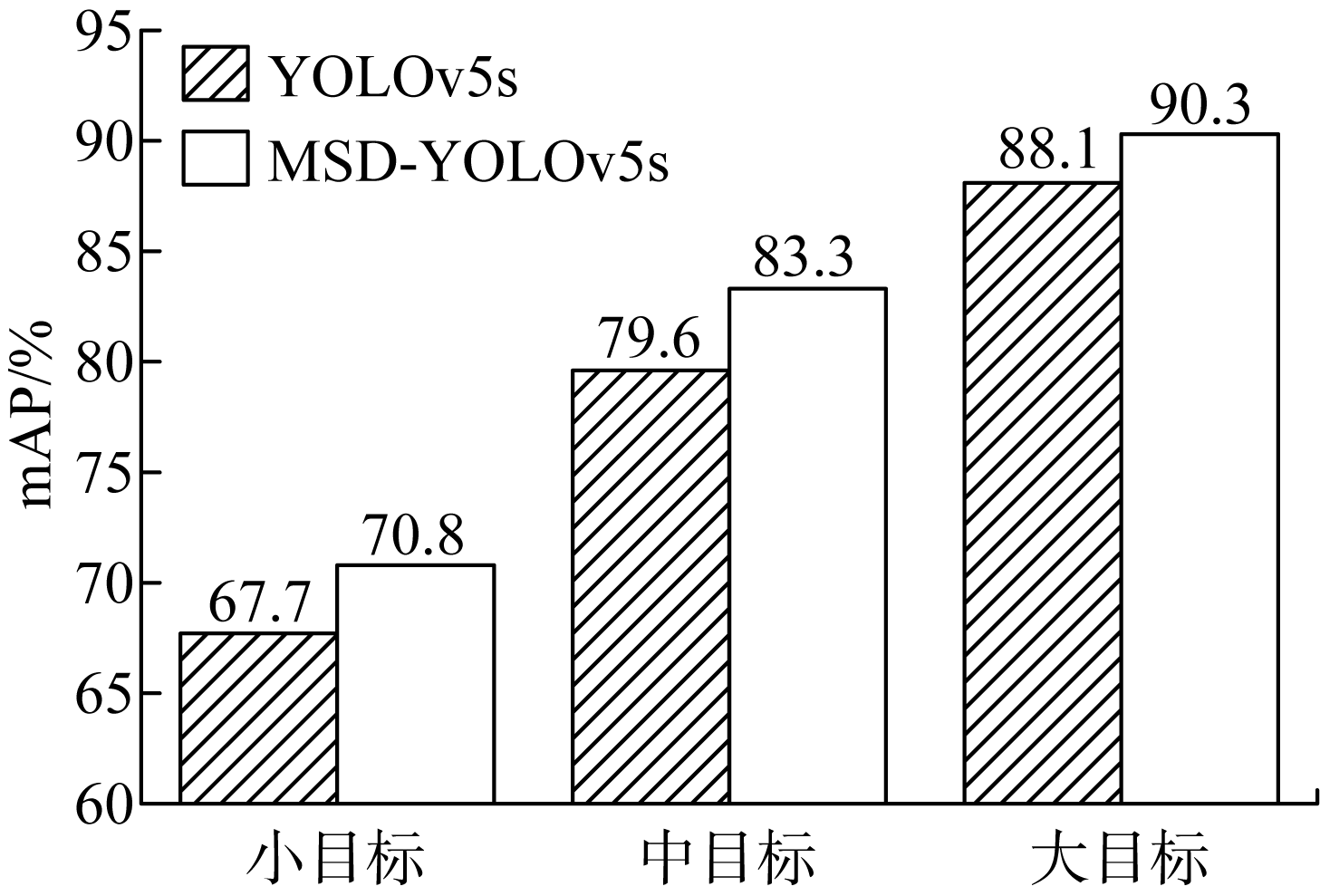
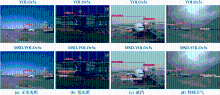
图9
YOLOv5s与MSD-YOLOv5s多尺度目标推理对比

表1
轻量化解耦头对比
| 名称 | mAP/% | 参数量/MB | 计算量/GB | FPS/(帧·s-1) |
|---|---|---|---|---|
| YOLOv5s | 67.21 | 7.1 | 15.8 | 84 |
| YOLOv5s-D | 69.10 | 14.3 | 56.2 | 31 |
| YOLOv5s-GSD | 69.00 | 11.2 | 45.3 | 47 |
表2
轻量化颈部对比
| 名称 | mAP/% | 参数 量/MB | 计算 量/GB | FPS/ (帧·s-1) |
|---|---|---|---|---|
| YOLOv5s-GSD | 69.0 | 11.2 | 45.3 | 47 |
| YOLOv5s-GSD-SN | 68.2 | 9.7 | 33.7 | 71 |
| YOLOv5s-GSD-DCSN | 68.8 | 9.7 | 33.7 | 71 |
表3
消融实验对比
| 方法 | mAP/% | 参数量/MB | 计算量/GB | FPS/ (帧·s-1) |
|---|---|---|---|---|
| YOLOv5s | 67.21 | 7.1 | 15.8 | 84 |
| +CA-BIFPN | 68.49 | 7.2 | 16.2 | 75 |
| +GSDetector | 70.95 | 12.3 | 43.7 | 47 |
| +DC Slim-Neck | 70.93 | 9.8 | 30.1 | 71 |
| +EIoU | 71.40 | 9.8 | 30.2 | 71 |
表4
典型算法对比
| 算法名称 | mAP/% | 参数量/ MB | 计算量/ GB | FPS/ (帧·s-1) |
|---|---|---|---|---|
| RetinaNet[ | 63.28 | 8.7 | 28.0 | 12 |
| Faster R-CNN[ | 68.95 | 28.3 | 947.3 | 15 |
| SSD[ | 64.82 | 23.6 | 235.2 | 49 |
| YOLOv5s[ | 67.21 | 7.1 | 15.8 | 84 |
| YOLOv6[ | 64.53 | 18.5 | 45.2 | 45 |
| YOLOv7[ | 66.14 | 37.2 | 105.7 | 40 |
| YOLOv8[ | 66.96 | 15.7 | 39.3 | 49 |
| YOLOX[ | 67.05 | 11.5 | 38.9 | 42 |
| 本文算法 | 71.40 | 9.8 | 30.2 | 71 |
| [1] | Airbus Pioneering Sustainable Aerospace. Airbus demonstrates the first fully automatic vision-based take-off[EB/OL]. (2020-01-16)[2024-05-20]. https://www.airbus.com/en/newsroom/press-releases/2020-01-airbus-demonstrates-first-fully-automatic-vision-based-take-off.. |
| [2] | 陈科圻, 朱志亮, 邓小明, 等. 多尺度目标检测的深度学习研究综述[J]. 软件学报, 2021, 32(4): 1201-1227. |
| CHEN Keqi, ZHU Zhiliang, DENG Xiaoming, et al. Deep learning for multi-scale object detection: A survey[J]. Journal of Software, 2021, 32(4): 1201-1227. | |
| [3] |
REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149.
doi: 10.1109/TPAMI.2016.2577031 pmid: 27295650 |
| [4] | LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot MultiBox detector[C]//European Conference on Computer Vision. Cham, Germany: Springer, 2016: 21-37. |
| [5] | LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, USA: IEEE, 2017: 936-944. |
| [6] | TAN M X, PANG R M, LE Q V. EfficientDet: Scalable and efficient object detection[C]//2020 IEEE Conference on Computer Vision and Pattern Recognition. Seattle, USA: IEEE, 2020: 10778-10787. |
| [7] | REDMON J, FARHADI A. YOLOv3: An incremental improvement[DB/OL]. (2018-04-08) [2024-05-20]. http://arxiv.org/abs/1804.02767. |
| [8] | LIN T Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2020, 42(2): 318-327. |
| [9] | 韩松臣, 张比浩, 李炜, 等. 基于改进Faster-RCNN的机场场面小目标物体检测算法[J]. 南京航空航天大学学报, 2019, 51(6): 735-741. |
| HAN Songchen, ZHANG Bihao, LI Wei, et al. Small target detection in airport scene via modified faster-RCNN[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2019, 51(6): 735-741. | |
| [10] |
黄国新, 李炜, 张比浩, 等. 改进SSD的机场场面多尺度目标检测算法[J]. 计算机工程与应用, 2022, 58(5): 264-270.
doi: 10.3778/j.issn.1002-8331.2010-0110 |
|
HUANG Guoxin, LI Wei, ZHANG Bihao, et al. Improved SSD-based multi-scale object detection algorithm in airport surface[J]. Computer Engineering and Applications, 2022, 58(5): 264-270.
doi: 10.3778/j.issn.1002-8331.2010-0110 |
|
| [11] | HE K M, ZHANG X Y, REN S Q, et al. Deep residual learning for image recognition[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, USA: IEEE, 2016: 770-778. |
| [12] | LI H L, LI J, WEI H B, et al. Slim-neck by GSConv: A lightweight-design for real-time detector architectures[J]. Journal of Real-Time Image Processing, 2024, 21(3): 62. |
| [13] | CHOLLET F. Xception: Deep learning with depthwise separable convolutions[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, USA: IEEE, 2017: 1800-1807. |
| [14] | TIAN Y L, ZHANG Q S, REN Z L, et al. Multi-scale dilated convolution network based depth estimation in intelligent transportation systems[J]. IEEE Access, 2019, 7: 185179-185188. |
| [15] | ZHANG X Y, ZHOU X Y, LIN M X, et al. ShuffleNet: An extremely efficient convolutional neural network for mobile devices[C]//2018 IEEE Conference on Computer Vision and Pattern Recognition. Salt Lake City, USA: IEEE, 2018: 6848-6856. |
| [16] | CHIU Y C, TSAI C Y, RUAN M D, et al. Mobilenet-SSDv2: An improved object detection model for embedded systems[C]//2020 International Conference on System Science and Engineering. Kagawa, Japan: IEEE, 2020: 1-5. |
| [17] | BOCHKOVSKIY A, WANG C Y, LIAO H Y. YOLOv4: Optimal speed and accuracy of object detection[DB/OL]. (2020-04-23) [2024-06-15]. https://arxiv.org/abs/2004.10934v1. |
| [18] | Ultralytics. YOLOv5[EB/OL]. (2020-06-03) [2024-06-15]. https://github.com/ultralytics/yolov5. |
| [19] | YAN K, HUA M, LI Y L. Multi-target detection in airport scene based on Yolov5[C]//2021 IEEE 3rd International Conference on Civil Aviation Safety and Information Technology. Changsha, China: IEEE, 2021: 1175-1177. |
| [20] | LIU S, QI L, QIN H F, et al. Path aggregation network for instance segmentation[C]//2018 IEEE Conference on Computer Vision and Pattern Recognition. Salt Lake City, USA: IEEE, 2018: 8759-8768. |
| [21] | LIN T Y, MAIRE M, BELONGIE S, et al. Microsoft COCO: Common objects in context[C]//European Conference on Computer Vision. Cham, Germany: Springer, 2014: 740-755. |
| [22] | GUPTA C, GILL N S, GULIA P, et al. A novel finetuned YOLOv6 transfer learning model for real-time object detection[J]. Journal of Real-Time Image Processing, 2023, 20(3): 42. |
| [23] | WANG C Y, BOCHKOVSKIY A, LIAO H Y M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors[C]//2023 IEEE Conference on Computer Vision and Pattern Recognition. Vancouver, Canada: IEEE, 2023: 7464-7475. |
| [24] | SAFALDIN M, ZAGHDEN N, MEJDOUB M. An improved YOLOv8 to detect moving objects[J]. IEEE Access, 2024, 12: 59782-59806. |
| [25] | DAI Z Y. Uncertainty-aware accurate insulator fault detection based on an improved YOLOX model[J]. Energy Reports, 2022, 8: 12809-12821. |
| [1] | 王宝坤, 王如路, 陈锦剑, 潘越, 王鲁杰. 基于深度学习的盾构隧道表观病害自动检测方法[J]. 上海交通大学学报, 2024, 58(11): 1716-1723. |
| [2] | 牛国臣, 孙翔宇, 苑峥岩. 基于双流特征提取的车路协同感知方法[J]. 上海交通大学学报, 2024, 58(11): 1826-1834. |
| [3] | 秦菁, 文渊博, 高涛, 刘瑶. 面向多天气退化图像恢复的自注意力扩散模型[J]. 上海交通大学学报, 2024, 58(10): 1606-1617. |
| [4] | 李春喜, 乔涵哲, 姚刚, 姜淏予, 崔向科, 葛泉波. 基于RBF-BLS面向电动汽车低碳安全出行的SOH估计方法[J]. 上海交通大学学报, 2024, 58(9): 1454-1464. |
| [5] | 黄鹤, 胡凯益, 杨澜, 王浩, 高涛, 王会峰. 智能行车记录仪图像去雾系统的FPGA设计[J]. 上海交通大学学报, 2024, 58(4): 565-578. |
| [6] | 黄鹤, 胡凯益, 李战一, 王会峰, 茹锋, 王珺. 融合MCAP和GRTV正则化的无人机航拍建筑物图像去雾方法[J]. 上海交通大学学报, 2023, 57(3): 366-378. |
| [7] | 程斌, 黄斌, 李得睿. 基于平行激光测距的图像自标定方法[J]. 上海交通大学学报, 2022, 56(7): 850-857. |
| [8] | 李钰, 杨道勇, 刘玲亚, 王易因. 利用生成对抗网络实现水下图像增强[J]. 上海交通大学学报, 2022, 56(2): 134-142. |
| [9] | 黄鹤, 吴琨, 李昕芮, 王珺, 王会峰, 茹锋. 自适应插值飞蛾扑火优化的多特征粒子滤波车辆跟踪算法[J]. 上海交通大学学报, 2022, 56(2): 143-155. |
| [10] | 张峻宁, 苏群星, 王成, 徐超, 李一宁. 一种改进变换网络的域自适应语义分割网络[J]. 上海交通大学学报, 2021, 55(9): 1158-1168. |
| [11] | 周俊杰, 余建波. 基于机器视觉的加工刀具磨损量在线测量[J]. 上海交通大学学报, 2021, 55(6): 741-749. |
| [12] | 武光利, 郭振洲, 李雷霆, 王成祥. 融合FCN和LSTM的视频异常事件检测[J]. 上海交通大学学报, 2021, 55(5): 607-614. |
| [13] | 何春霞, 陆德荣, 肖声明. 纳米颗粒填充聚四氟乙烯基复合材料的分散性表征[J]. 上海交通大学学报(自然版), 2011, 45(09): 1411-1415. |
| [14] | 陈硕, 于晓升, 吴成东, 陈东岳. 用于场景分类的显著建筑物区域检测[J]. 上海交通大学学报(自然版), 2011, 45(08): 1130-1135. |
| [15] | 屠晏欣, 朱逸, 杜正春. 一种基于重心计算的角点检测算法[J]. 上海交通大学学报(自然版), 2011, 45(07): 1031-1034. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||