上海交通大学学报 ›› 2024, Vol. 58 ›› Issue (11): 1826-1834.doi: 10.16183/j.cnki.jsjtu.2024.239
• 制导、导航与控制 • 上一篇
牛国臣( ), 孙翔宇, 苑峥岩
), 孙翔宇, 苑峥岩
收稿日期:2024-06-21
修回日期:2024-07-16
接受日期:2024-07-18
出版日期:2024-11-28
发布日期:2024-12-02
作者简介:牛国臣(1981—),副教授,从事智能机器人环境感知研究;E-mail:niu_guochen@139.com.
基金资助:
NIU Guochen(), SUN Xiangyu, YUAN Zhengyan
Received:2024-06-21
Revised:2024-07-16
Accepted:2024-07-18
Online:2024-11-28
Published:2024-12-02
摘要:
针对自动驾驶在遮挡、超视距场景下感知不充分的问题,提出一种基于双流特征提取网络的特征级车路协同感知方法,以增强交通参与者的3D目标检测能力.根据路端与车端场景特点分别设计对应的特征提取网络:路端具有丰富且充足的感知数据和计算资源,采用Transformer结构提取更丰富、高级的特征表示;车端计算能力有限、实时性需求高,利用部分卷积(PConv)提高计算效率,引入Mamba-VSS模块实现对复杂环境的高效感知.通过置信度图指导关键感知信息共享与融合,有效实现了车路双端的协同感知.在DAIR-V2X数据集训练与测试,得到车端特征提取网络模型大小为8.1 MB,IoU阈值为0.5、0.7时对应平均精度指标为67.67%、53.74%.实验验证了该方法在检测精度、模型规模方面具备的优势,为车路协同提供了一种较低配置的检测方案.
中图分类号:
牛国臣, 孙翔宇, 苑峥岩. 基于双流特征提取的车路协同感知方法[J]. 上海交通大学学报, 2024, 58(11): 1826-1834.
NIU Guochen, SUN Xiangyu, YUAN Zhengyan. Vehicle-Road Collaborative Perception Method Based on Dual-Stream Feature Extraction[J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1826-1834.

图1
协同感知场景示意图

图2
车路协同检测框架整体结构
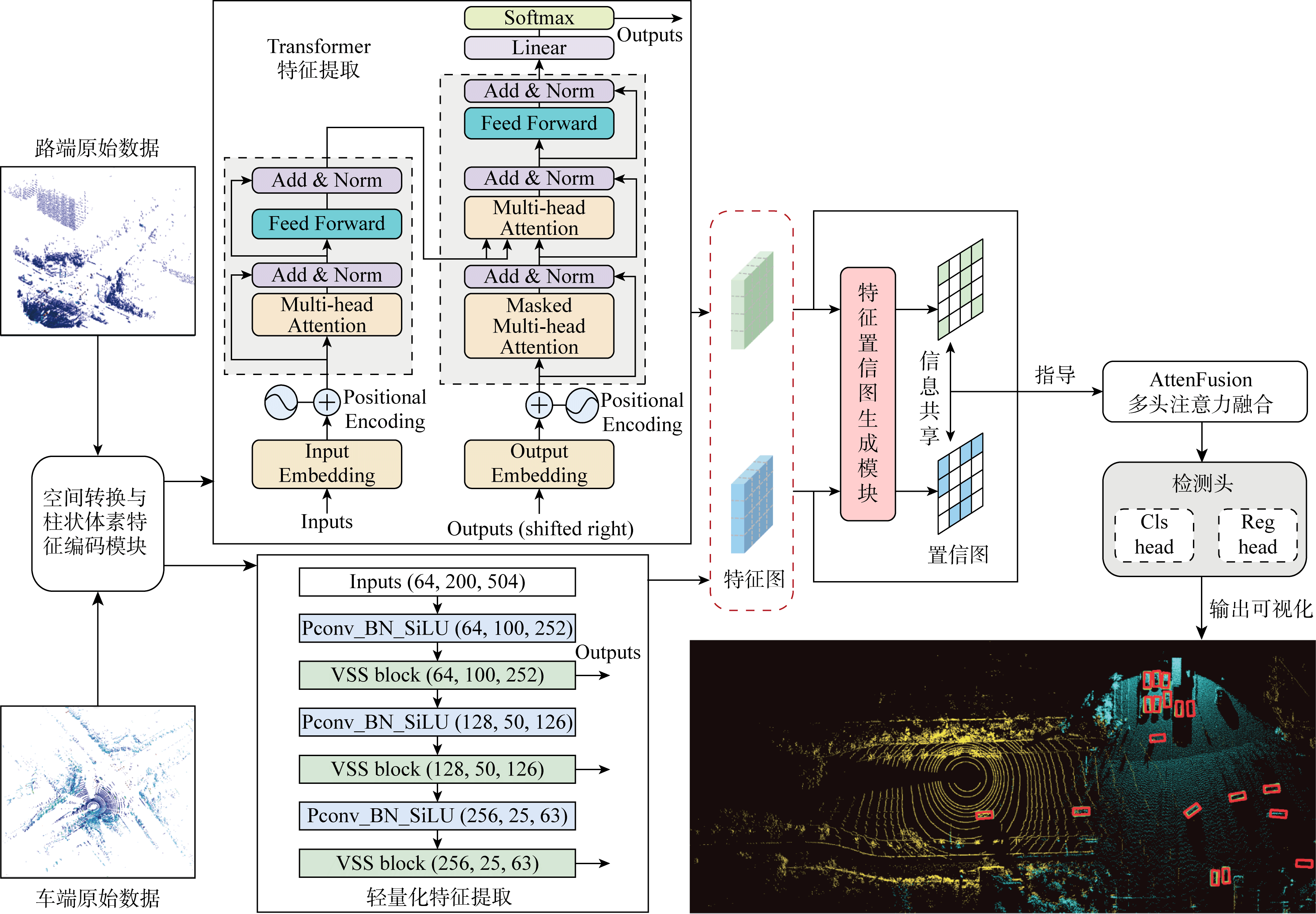

图3
车端轻量化特征提取主干网络设计
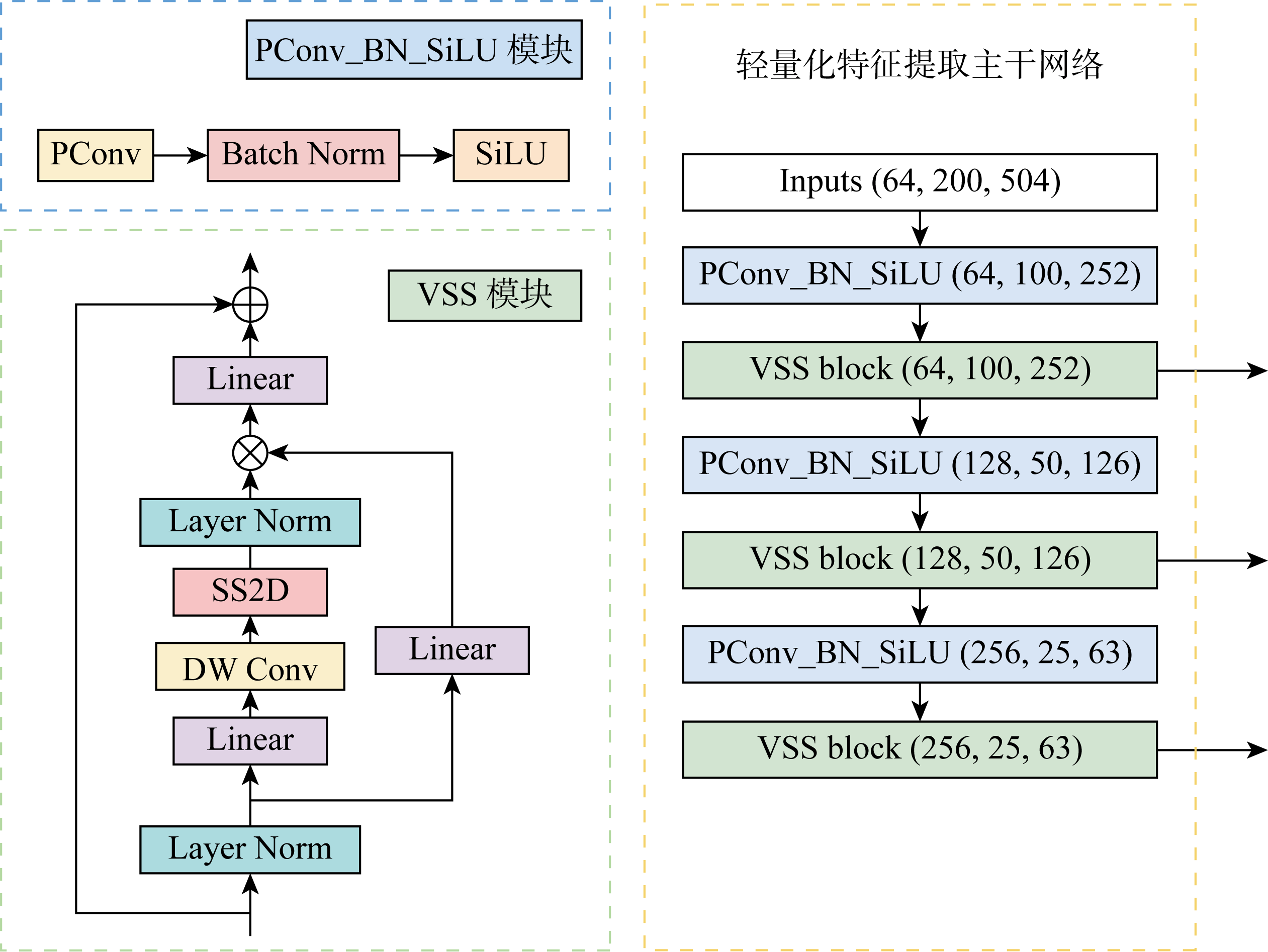
表1
本文方法与其他特征提取网络的对比结果
| 网络 | 方法 | AP30/% | AP50/% | AP70/% | 模型大小/MB | GFLOPs | ||
|---|---|---|---|---|---|---|---|---|
| 轻量化单主干网络 | MobileNetV2 | 59.54 | 53.19 | 34.25 | 3.5 | 0.3 | ||
| FasterNet | 63.10 | 57.25 | 38.75 | 7.6 | 0.85 | |||
| YOLO-backbone | 62.19 | 55.70 | 36.11 | 5.1 | 2.1 | |||
| EfficientFormerv2 | 60.76 | 55.85 | 38.60 | 6.1 | 2.7 | |||
| 大规模单主干网络 | ResNet | 66.80 | 62.14 | 46.50 | 61.0 | 10.1 | ||
| ConvNextv2 | 66.57 | 61.61 | 46.60 | 89.0 | 15.4 | |||
| Swin-Transformer | 71.17 | 66.36 | 52.44 | 88.0 | 15.4 | |||
| 车路双流主干网络 | 本文方法 | 72.35 | 67.67 | 53.74 | 车端,8.1 | 路端,88 | 车端,1.1 | 路端,15.8 |
表2
消融实验结果
| Baseline | PConv | Mamba- VSS | AP30/ % | AP50/ % | AP70/ % | 模型 大小/MB |
|---|---|---|---|---|---|---|
| √ | 67.54 | 61.27 | 51.82 | 13.5 | ||
| √ | √ | 71.11 | 64.48 | 51.05 | 9.7 | |
| √ | √ | √ | 72.35 | 67.67 | 53.74 | 8.1 |
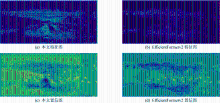
图4
车端特征图和置信图可视化对比
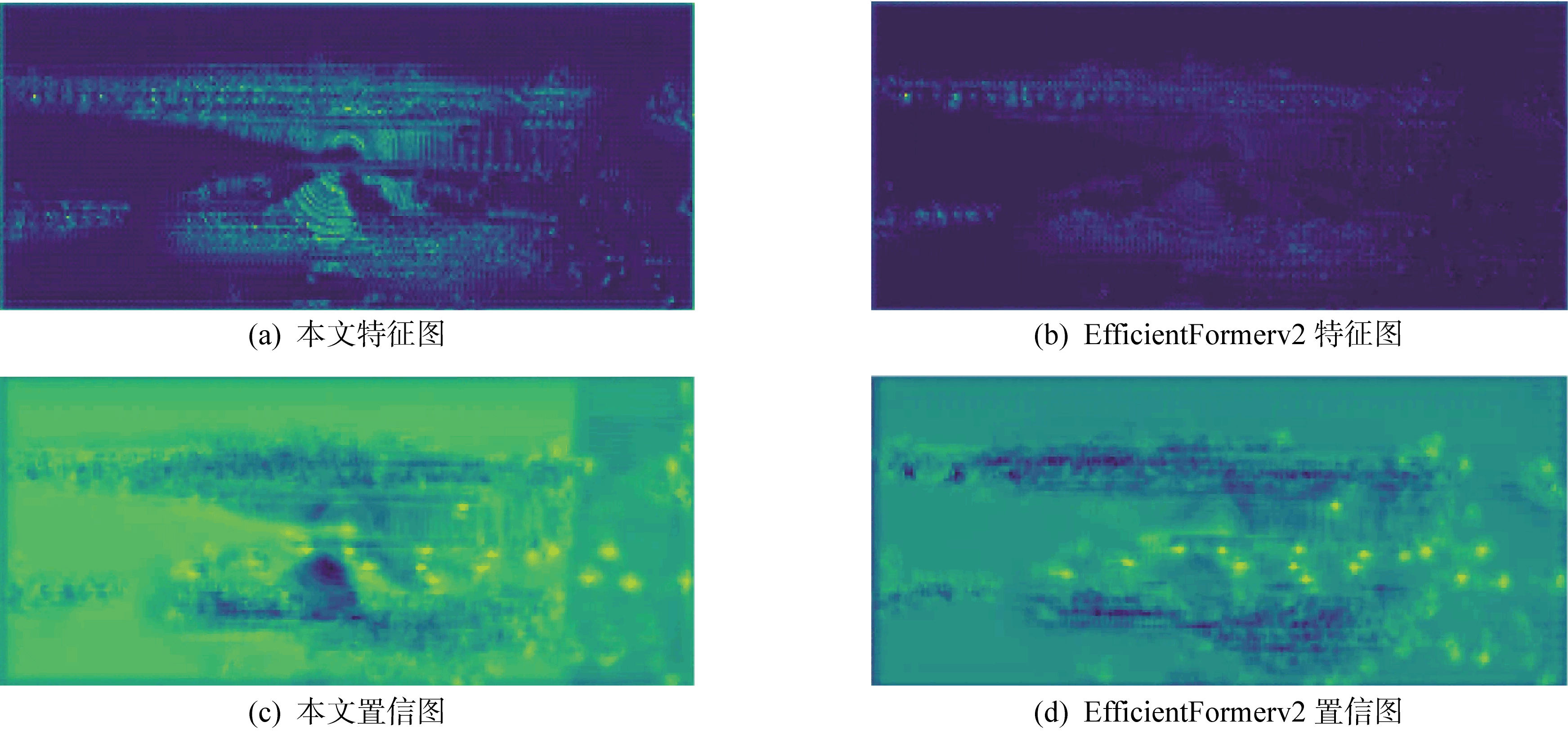
表3
本文方法与其他协同感知方法的对比结果
| 方法 | AP50/% | AP70/% | C |
|---|---|---|---|
| No Collaboration | 50.03 | 43.57 | 0.00 |
| Late Fusion | 53.12 | 37.88 | 11.45 |
| When2com | 51.12 | 36.17 | 22.62 |
| V2VNet | 56.01 | 42.25 | 24.21 |
| V2X-ViT | 54.26 | 43.35 | 22.62 |
| DiscoNet | 54.29 | 44.88 | 22.62 |
| Where2comm | 63.54 | 48.78 | 20.56 |
| 本文方法 | 67.67 | 53.74 | 20.56 |
图5
3D视角下不同协同框架的感知结果比较
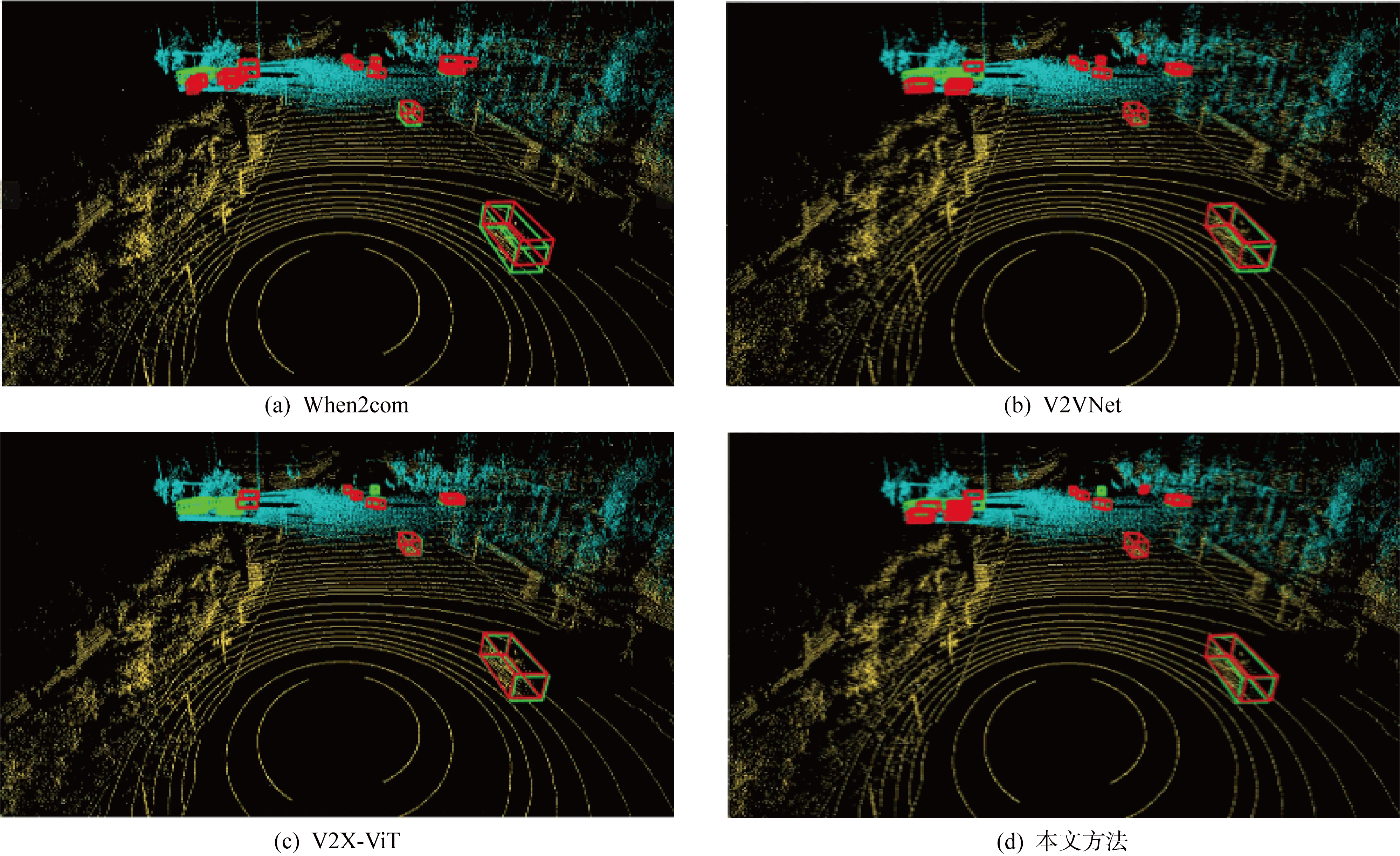
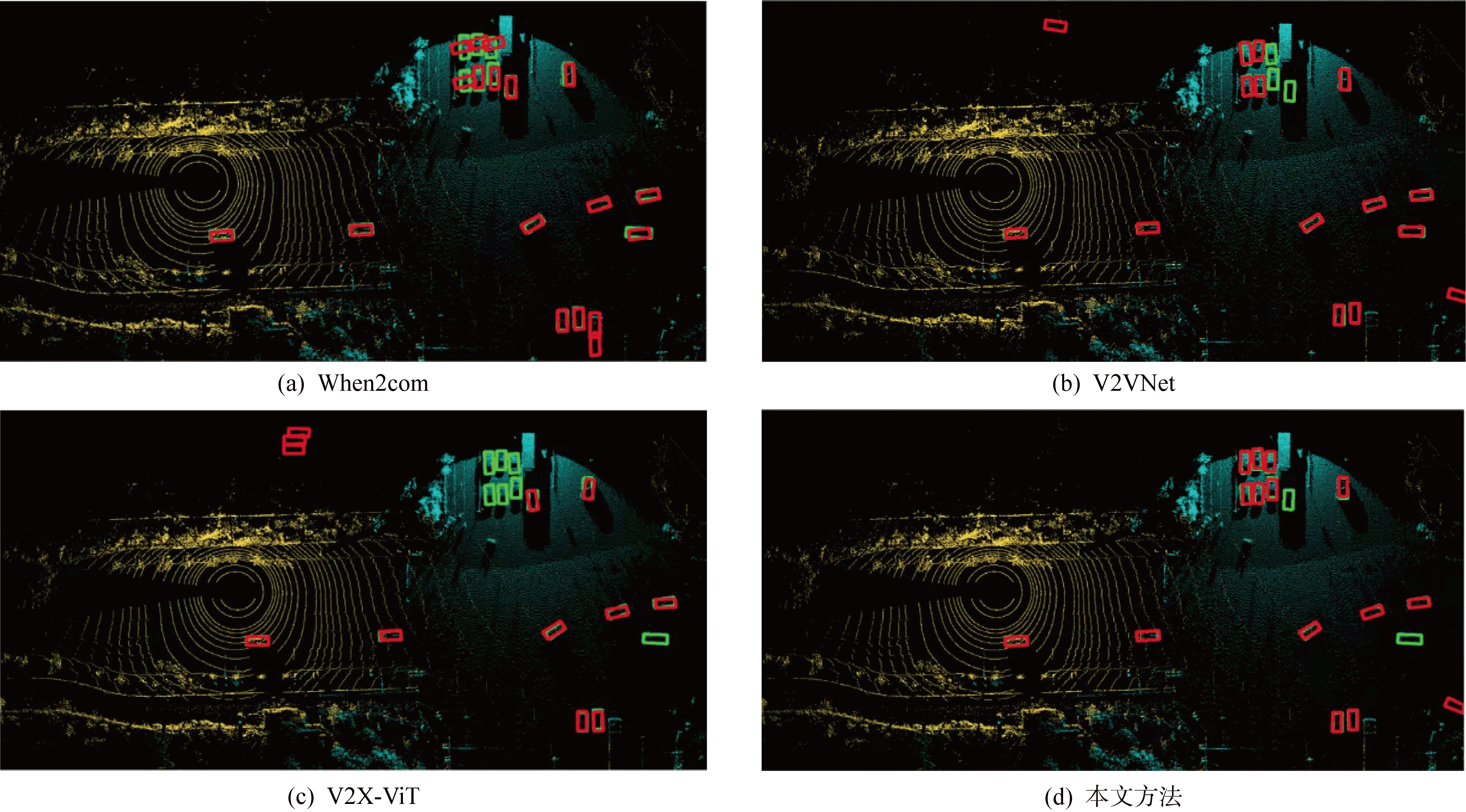
图6
BEV视角下不同协同框架的感知结果比较
| [1] |
伊笑莹, 芮一康, 冉斌, 等. 车路协同感知技术研究进展及展望[J]. 中国工程科学, 2024, 26(1): 178-189.
doi: 10.15302/J-SSCAE-2024.01.016 |
|
YI Xiaoying, RUI Yikang, RAN Bin, et al. Vehicle-infrastructure cooperative sensing: Progress and prospect[J]. Strategic Study of CAE, 2024, 26(1): 178-189.
doi: 10.15302/J-SSCAE-2024.01.016 |
|
| [2] | ARNOLD E, DIANATI M, DE TEMPLE R, et al. Cooperative perception for 3D object detection in driving scenarios using infrastructure sensors[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(3): 1852-1864. |
| [3] | 张毅, 姚丹亚, 李力, 等. 智能车路协同系统关键技术与应用[J]. 交通运输系统工程与信息, 2021, 21(5): 40-51. |
| ZHANG Yi, YAO Danya, LI Li, et al. Technologies and applications for intelligent vehicle-infrastructure cooperation systems[J]. Journal of Transportation Systems Engineering and Information Technology, 2021, 21(5): 40-51. | |
| [4] | DOSOVITSKIY A, ROS G, CODERVILLA F, et al. CARLA: An open urban driving simulator[C]//1st Conference on Robot Learning. Mountain View, USA: CoRL, 2017: 5550767. |
| [5] | CHEN Q, TANG S H, YANG Q, et al. Cooper: Cooperative perception for connected autonomous vehicles based on 3D point clouds[C]//2019 IEEE 39th International Conference on Distributed Computing Systems. Dallas, TX, USA: IEEE, 2019: 514-524. |
| [6] | CHEN Q. F-cooper: Feature based cooperative perception for autonomous vehicle edge computing system using 3D point clouds[DB/OL]. (2019-09-13)[2024-06-10]. https://arxiv.org/abs/1909.06459. |
| [7] | GUO J D, CARRILLO D, TANG S H, et al. CoFF: Cooperative spatial feature fusion for 3-D object detection on autonomous vehicles[J]. IEEE Internet of Things Journal, 2021, 8(14): 11078-11087. |
| [8] | HU Y, FANG S, LEI Z, et al.Where2comm: Communication-efficient collaborative perception via spatial confidence maps[C]//36th Corference on Neural Information Processing Systems. New Orleans, USA: NIPS, 2022: 4874-4886. |
| [9] | LIU Y C, TIAN J J, GLASER N, et al. When2com: Multi-agent perception via communication graph grouping[C]//2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Seattle, WA, USA: IEEE, 2020: 4105-4114. |
| [10] | WANG J Y, ZENG Y, GONG Y. Collaborative 3D object detection for automatic vehicle systems via learnable communications[DB/OL]. (2022-05-24) [2024-06-10]. https://arxiv.org/abs/2205.11849v1. |
| [11] | 王秉路, 靳杨, 张磊, 等. 基于多传感器融合的协同感知方法[J]. 雷达学报, 2024, 13(1): 87-96. |
| WANG Binglu, JIN Yang, ZHANG Lei, et al. Collaborative perception method based on multisensor fusion[J]. Journal of Radars, 2024, 13(1): 87-96. | |
| [12] | LANG A H, VORA S, CAESAR H, et al. PointPillars: Fast encoders for object detection from point clouds[C]//2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Long Beach, CA, USA: IEEE, 2019: 12689-12697. |
| [13] | DOSOVITSKIY A, BEYER L, KOLESNIKOV A, et al. An image is worth 16×16 words: Transformers for image recognition at scale[DB/OL]. (2020-10-22)[2024-06-10]. https://arxiv.org/abs/2010.11929. |
| [14] | LIU Z, LIN Y T, CAO Y, et al. Swin transformer: Hierarchical vision transformer using shifted windows[C]//2021 IEEE/CVF International Conference on Computer Vision. Montreal, QC, Canada: IEEE, 2021: 9992-10002. |
| [15] | CHEN J R, KAO S H, HE H, et al. Run, don’t walk: Chasing higher FLOPS for faster neural networks[C]//2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver, BC, Canada: IEEE, 2023: 12021-12031. |
| [16] | GU A, DAO T. Mamba: Linear-time sequence modeling with selective state spaces[DB/OL]. (2023-12-01)[2024-06-10]. https://arxiv.org/abs/2312.00752v2. |
| [17] | 上海交通大学. 基于空间置信度图的多轮多模态多智能体的协同感知方法: CN 202211076556.X[P]. 2022-12-13[2024-06-10]. |
| [18] | YU H B, LUO Y Z, SHU M, et al. DAIR-V2X: A large-scale dataset for vehicle-infrastructure cooperative 3D object detection[C]//2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. New Orleans, LA, USA: IEEE, 2022: 21329-21338. |
| [19] | WANG T H, MANIVASAGAM S, LIANG M, et al. V2VNet: Vehicle-to-Vehicle communication for joint perception and prediction[M]//Computer Vision-ECCV 2020. Cham: Springer, 2020: 605-621. |
| [20] | XU R S, XIANG H, TU Z Z, et al. V2X-ViT: Vehicle-to-Everything cooperative perception with Vision Transformer[M]//Computer Vision-ECCV 2022. Cham: Springer, 2022: 107-124. |
| [21] | MEHR E, JOURDAN A, THOME N, et al. DiscoNet: Shapes learning on disconnected manifolds for 3D editing[C]//2019 IEEE/CVF International Conference on Computer Vision. Seoul: IEEE, 2019: 3473-3482. |
| [1] | 彭诗玮1,张希1,朱旺旺1,窦瑞2. 融合乘客感受量化指标的智能汽车舒适性研究[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(6): 1063-1070. |
| [2] | 刘增敏1, 2, 3, 4, 6, 王申涛5, 姚莉秀1, 2, 3, 蔡云泽1, 2, 3, 4, 6. 基于目标检测和特征提取网络的运动无人机平台下多目标跟踪[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(3): 388-399. |
| [3] | 曾志贤,曹建军,翁年凤,袁震,余旭. 基于细粒度联合注意力机制的图像-文本跨模态实体分辨[J]. J Shanghai Jiaotong Univ Sci, 2023, 28(6): 728-737. |
| [4] | 詹燕, 陈志慧, 朱宝昌, 朱婷婷, 邵益平, 鲁建厦. 基于自适应颜色快速点特征直方图的托盘识别方法[J]. 上海交通大学学报, 2023, 57(3): 297-308. |
| [5] | . 外参标定的激光-视觉-惯性里程计[J]. J Shanghai Jiaotong Univ Sci, 2023, 28(1): 70-76. |
| [6] | 张晏合, 臧月进, 陈渤, 徐铭晟. 基于解耦表征变分自编码机的雷达目标识别算法[J]. 空天防御, 2022, 5(2): 87-93. |
| [7] | 王微, 王冰, 胡雄, 孙德建. 基于在线改进符号序列熵与逻辑回归模型的岸桥起升减速箱在线退化评估[J]. 上海交通大学学报, 2021, 55(10): 1272-1280. |
| [8] | 李晨, 梁小溪, 梁军利, 刘睿恺, 叶中华. 用于协同感知的分布式聚类方法研究[J]. 空天防御, 2020, 3(3): 46-53. |
| [9] | 王俊, 王赛, 任俞明, 陈德红, 崔闪, 魏少明. 结合深度学习去噪和超分辨的SAR检测识别[J]. 空天防御, 2020, 3(3): 24-30. |
| [10] | 施振兴, 管再升, 王磊, 施臣钢, 伍彬. 基于遗传算法的自动驾驶仪参数多目标优化研究[J]. 空天防御, 2020, 3(1): 41-49. |
| [11] | 许凤麟,苗玉彬,张铭. 基于彩色加权引导滤波-Retinex算法的导航图像增强[J]. 上海交通大学学报, 2019, 53(8): 921-927. |
| [12] | 颜波,张磊,褚学宁. 基于卷积神经网络的用户感知评估建模[J]. 上海交通大学学报, 2019, 53(7): 844-851. |
| [13] | 商诺诺, 梁艳, 翟恒峰, 原浩娟. 一种高效的雷达信号全脉冲特征提取方法[J]. 空天防御, 2018, 1(4): 37-43. |
| [14] | 吴倩红,韩蓓,冯琳,李国杰,江秀臣. “人工智能+”时代下的智能电网预测分析[J]. 上海交通大学学报(自然版), 2018, 52(10): 1206-1219. |
| [15] | 王瑞,刘宾,周天润,杨羽. 基于协同表示的声振传感器网络车辆分类识别[J]. 上海交通大学学报(自然版), 2018, 52(1): 103-110. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||