

自动引导车(Automatic Guided Vehicle, AGV)是一种服务物流配送的智能化设备,凭借其高效、经济、灵活以及自动化水平高等优势,在某民用客机总装车间的物料配送中发挥着重要作用.该总装车间采用脉动式移动装配线生产模式,线边库采用立体仓库存储各装配大纲(Assembly Order, AO)的物料料包,车间内共有3个工位,分别完成功能系统的安装、功能系统的总装测试以及最终功能试验3大类作业.各工位边设置了工位暂存区,在AO工序开始前,车间内AGV将其料包提前从线边库配送至工位暂存区,供工人取用.
总装车间内AGV的调度优化是提高总装生产物流配送效率,满足生产计划正常有序进行的关键.对AGV的调度优化是指在生产计划的约束下,为多辆AGV分配配送任务,并规划每辆AGV的配送路径,同时避免AGV间碰撞、死锁等冲突现象发生.目标是在满足生产计划的前提下,最小化AGV的使用成本.AGV的调度优化问题得到了很多国内外学者的关注,目前已有研究大都集中在任务分配和路径规划两个方面.
针对考虑实时路径及避撞的AGV路径规划问题,常用算法包括Dijkstra算法[5-6]、A*算法[7-8]、遗传算法[9-10]、人工势场法[11-12]等.Xing等[13]提出了一种改进TSA解决多个AGV同时工作时可能发生的冲突,以提高自动化仓库中AGV的拣货效率.曾庆成等[14]针对自动化集装箱码头物流系统提出一种动态路径规划策略,建立AGV路径规划模型,并设计了基于动态路径规划策略的多种群蚁群算法进行求解.刘辉等[15]将多智能体强化学习应用于AGV的路径规划问题,并提出了一种基于最大化累计回报频率的独立强化学习的方法.Murakami[16]针对AGV在柔性制造系统中的无冲突路径规划问题,分别考虑AGV和物料流动,建立了时空网络模型,并将其转化为混合整数规划问题进行求解.
现有同时考虑AGV的任务分配与路径规划的研究中,基本都是通过简化其中一个问题的求解来实现的.如,杨雅洁等[17]基于网格路径布局地图建立了混合整数规划模型对任务分配进行求解,通过在模型中加入AGV在路口避碰约束以实现无冲突路径规划.泰应鹏等[18]则针对任务分配建立了混合整数规划模型,并通过对经过路径的时间窗的排布和更新解决碰撞冲突问题.Kelen等[19]通过TSA算法实现任务分配的优化,接着基于Dijkstra算法的最短路径和时间窗方法实现AGV的路径规划.Hao等[20]针对无人地下停车场中AGV系统的任务分配和路径规划问题,提出了一种基于混合遗传算法的AGV调度方法和一种基于时空图搜索算法的路径优化方法.Riazi等[21]提出了一种基于改进Benders分解的方法,将AGV调度问题分解为任务分配和碰撞避免约束可行性检查两个阶段,但不适用于AGV数量较多的场景.
此外,现有文献都是假设AGV仅执行单次配送,鲜有文献考虑AGV在配送过程中执行多次往返配送(即配送站点及工位暂存区之间的往返配送)的问题,这是由于在AGV调度优化过程中考虑多次往返配送时,建模和求解过程变得非常复杂.为了解决民用客机总装车间物流配送过程中AGV的调度优化问题,本文提出任务分配与路径规划两阶段求解方法,同时针对AGV在车间内的多次往返配送现象,基于车间栅格化地图,设计了基于“行程”的AGV任务分配模型,进而采用时间窗算法对AGV实际配送中经过的栅格节点进行时间窗排布,并设计开发高效的启发式调整策略实现物料配送时间冲突消解.
1 总装车间地图建模
图1
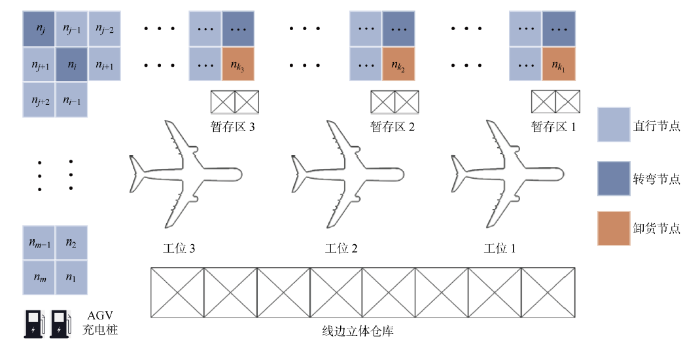
车间内包含两条AGV行驶道路,且均为单向行驶.根据行驶方向对各节点进行顺序编号,节点集合N={n1, n2, …, nm},其中
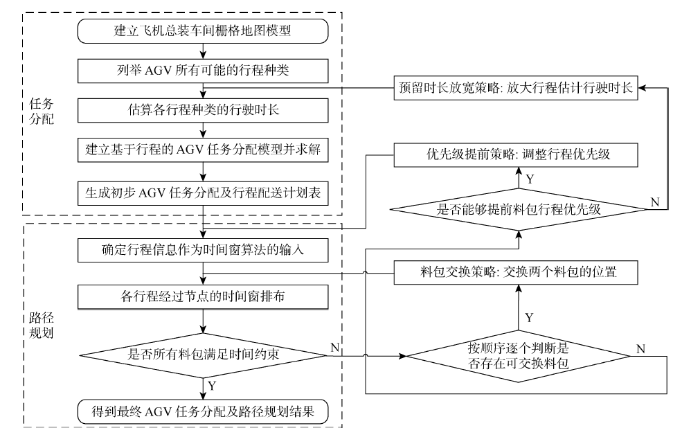
基于栅格化地图模型,提出AGV任务分配与路径规划两阶段求解方法,流程图如图2所示.
图2
2 基于行程的AGV任务分配模型
首先通过行程规划列举出车间内AGV所有可能的行程种类,在此基础上以最小化AGV的配送总成本为目标,建立基于行程的AGV任务分配混合整数规划模型.通过对AGV的行程规划,提前确定不同任务组合下的可能行程信息,能够简化物料送达时间约束的定义,进而降低决策变量维度,提高模型的求解效率.
2.1 行程规划
行程是指AGV从线边库出发,行驶至所有目标暂存区完成AO料包的配送,并最终回到AGV充电桩附近停靠点的整个回路.首先根据配送料包数量、行驶道路的特点、目标暂存区组合等对AGV行程进行分类,并估算每个行程的总行驶时长.假设工位暂存区数量为W,AGV的装载容量为Q,用J表示AGV所有可能的行程种类集合,则行程种类总数为
一个行程种类信息可以用一个长度为W的向量α来表示,向量中第i个值表示送往暂存区i的AO料包数量,向量同时确定了AGV的所有目标暂存区,例如αj=[0 Q … 0 0]表示该行程需要将Q个AO料包送往暂存区2.为了建立AGV配送的AO料包组合与行程的对应关系,首先为W个暂存区进行编号取值D=[D1D2 … DW],第j种行程种类的编号取值通过以下公式计算得到:Nj=D
2.2 AGV任务分配模型
模型参数及变量定义如下:I为AO料包集合;K为AGV车辆集合;R为每辆AGV实际配送的行程集合.第i(i∈I)个料包从线边库出发至目标工位暂存区的配送时长为Ti,最晚送达时间为Li;第j(j∈J)种行程种类的AGV运行估计时长为Cj.AGV的单位投入成本和单位时间的运行成本分别定义为CV和CT.
模型决策变量包括:xikr (i∈I, k∈K, r∈R)为0-1变量,表示第i个料包是否由第k个AGV的第r次行程完成,是为1、否为0;wjkr (j∈J, k∈K, r∈R)为0-1变量,表示第k辆AGV的第r次行程是否为第j种行程种类,是为1、否为0;ckr (k∈K, r∈R)为连续型变量,表示第k辆AGV的第r次行程的运行时长;zkr (k∈K, r∈R)为连续型变量,表示第k辆AGV的前r次行程的总运行时长;yk (k∈K)为0-1变量,表示第k辆AGV是否被启用,是为1、否为0;ti (i∈I)为连续型变量,表示第i个料包的实际送达时间.
建立AGV多行程任务分配模型如下:
目标函数式(1)为最小化AGV投入和运行成本总和;式(2)保证每个AO料包有且仅由一辆AGV的一趟行程进行配送;式(3)保证AGV至少配送1个AO料包时就认为被启用;式(4)为AGV的装载容量约束;式(5)~(6)为AGV每趟行程中配送料包组合与行程种类的对应关系式;式(7)为计算AGV每趟行程的估计路径运行时长;式(8)~(9)为计算每个料包的实际送达时间;式(10)为每个料包的最晚送达时间约束;式(11)保证AGV的启用顺序为从k-1到k;式(12)保证配送行程的顺序从r-1到r;式(13)~(16)为决策变量的可行域.
3 基于时间窗算法的AGV路径规划
得到各AGV的任务分配结果和AGV每趟行程的具体信息后,通过时间窗算法来实现AGV在实际行驶过程中的无冲突路径规划.时间窗算法[23]是建立在AGV外界环境无干扰假设下的一种预测式避障算法,即通过建立AGV的路径信息矩阵,预先安排AGV占用栅格地图中节点的顺序,避免行驶过程中的冲突和碰撞.
3.1 时间窗算法
3.1.1 行程信息的定义
总装车间栅格化地图中的每个栅格都可以用节点来表示,各节点的权重值定义为AGV通过该节点的运行时间与在该节点上的卸货时间之和:
式中:ld为节点nd对应栅格的实际物理长度;vd为AGV在节点nd对应栅格上行驶的平均速度;td为在节点nd对应栅格上的卸货时间,该时间仅在卸货节点存在.
以每辆AGV的每趟行程为单位,依次对每趟行程进行时间窗的排布.为了后续时间窗规划,对任务分配结果中所有AGV的所有行程进行重新编号,获得行程集合S,并通过一个列表Ms来表示每个行程的具体信息,转化为时间窗规划工作,作为时间窗算法的输入:
式中:s为行程编号,s∈S;B为行程s对应的行程种类编号,B∈J;Is为行程s的所有配送料包编号集合;tstart为行程s开始执行的时间;k为行程s对应的AGV编号;Yrank为行程s的执行优先级,初始取值为行程s对应所有配送料包的剩余配送时间,定义为所有料包最晚送达时间和实际送达时间差值之和
3.1.2 栅格节点时间窗定义
Ms对应的行程s按照顺序经过的所有节点集合定义为Ns⊆{n1, n2, …, nm},Ms在节点nd∈Ns上的时间窗函数定义如下:
式中:q为节点nd在节点集合Ns中的顺序编号;tin, d为车辆k进入节点nd的时间;tout, d为车辆k离开节点nd的时间.对于节点nd的时间窗,满足下式:
若节点nd为起始节点,则进入起始节点的时间等于工作开始时间;若节点nd不是起始节点,则进入节点的时间等于AGV离开路径中第q-1个节点的时间,即
式中:dq为AO料包q的目标暂存区对应的节点编号.
对于一个节点上的多个时间窗可用向量的形式表示为
式中:P为当前所有行程规划出的路径中经过节点nd的总行程数.
若一条边上存在多个工作的时间窗,新加入工作时间窗中的进入时间必须满足:①进入该条边的时间必须大于AGV从上一条边的离开时间;②该条边的空闲时间窗的长度足够使车辆k在该时间内行驶离开该条边.假设在完成工作Ms之前,已经有s-1个工作安排,且该s-1个工作中有P个工作规划的行程是经过节点nd的,为找出一个足够长的空余时间窗来安排新的工作,空余时间窗系数由下式确定:
CK=arg
max {(tout, d)l,
l=1, 2, …, P}
CK确定后,节点nd上的时间窗的进入时间如下:
若节点nd上的前P个时间窗排列紧密,无法在之前的空余时间窗排布出一个新的时间窗,则新的时间窗需要排在第P个时间窗之后,进入时间的对应函数为
时间窗规划完成后,得到的AO料包q的实际送达时间由下式给出:
式中:sq为AO料包q对应的时间窗规划工作
3.1.3 时间窗算法步骤
时间窗算法具体的步骤如下.
步骤1 时间窗规划工作的定义.将AGV任务分配模型求解得到的所有AGV行程通过式(18)转化为时间窗规划工作.
步骤2 时间窗的初始化.根据工作对应的行程种类,找出行程经过的节点集合Nd⊆{n1, n2, …, nm},根据式(19)~(21)为每个节点排布出理想的时间窗分布.
步骤3 时间窗的更新.在排布出理想情况下的节点时间窗后,再来检查不同行程之间是否包含相同的节点.若无相同节点,则结束时间窗规划;若存在相同节点,根据式(22)得到该节点的时间窗向量.
步骤4 时间窗的插入.根据式(23)计算出空余时间窗系数CK,通过式(24)确定进入时间,并更新该工作在相同节点之后的所有节点的时间窗.
步骤5 实际送达时间计算.根据式(25)计算各个AO料包的实际送达时间.
3.2 基于启发式策略的冲突消解
时间窗算法在进行无冲突路径规划时,AO料包的实际送达时间会因冲突产生的等待而延迟,从而发生违反最晚送达时间的现象,对此设计了3种递进的调整策略以实现冲突的消解.
(1) 料包交换策略:对违背约束的料包,搜索具有相同目标暂存区的料包,通过交换两个料包的配送车辆编号及配送行程,实现料包实际送达时间的互换,若交换后两个料包的最晚送达时间约束都能满足,则进行互换.料包交换策略的具体步骤如下.
步骤1 检查时间窗算法路径规划结果,得到违背约束的料包集合I',以及集合中料包数量KV,并令p=1.
步骤2 得到集合I'中第p个料包的目标暂存区,在所有料包集合I中搜索与之目标暂存区相同的料包集合Ip.
步骤3 遍历料包集合Ip,判断是否存在料包q满足:料包q的实际送达时间小于料包p的最晚送达时间,且料包p的实际送达时间小于料包q的最晚送达时间.若存在,则转至步骤4,否则,结束料包交换策略,并转至优先级提前策略.
步骤4 交换料包p和q的配送车次和行程轮次,并将第p个料包从集合I'中移除,判断集合I'是否为空集,若I'为空集,结束料包交换策略,调整完成;若I'非空,则令p=p+1,并转至步骤2.
(2) 优先级提前策略:若料包交换策略失效,则对违背约束的料包,找出料包所在行程,并将行程对应的时间窗规划工作优先级提前,重新进行时间窗规划,同时采用料包交换策略进行辅助调整.优先级提前策略的具体步骤如下.
步骤1 检查时间窗算法路径规划结果,得到违背约束的料包集合I'以及集合中料包数量KV,若I'为空集,结束优先级提前策略,调整完成;若I'非空,则转步骤2.
步骤2 搜索得到集合I'中第1个料包所在的行程编号sp.
步骤3 若sp=1,结束优先级提前策略,转至预留时长放宽策略;若sp≠1,则将行程sp的优先级与行程sp-1的优先级互换,重新通过时间窗算法排布行程集合P中的所有行程.
(3) 预留时长放宽策略:成倍放宽任务分配阶段行程的估计行驶时长,给AGV的冲突预留更多时间,重新求解任务分配模型,并运行时间窗算法进行路径规划,同时采用料包交换策略和优先级提前策略进行辅助调整.预留时长放宽策略的具体步骤如下.
步骤1 设置放宽倍数v=1.1.
步骤2 放宽任务分配阶段各个行程种类的估计行驶时长,令Cj=vCj,并重新调用两阶段求解方法进行任务分配和路径规划.
步骤3 重新检查时间窗算法路径规划结果,得到违背约束的料包集合I'以及集合中料包数量KV,若I'为空集,结束预留时长放宽策略,调整完成;若I'非空,通过料包交换策略和优先级提前策略进行调整,得到最终违背约束的料包集合I″,若I″为空集,结束预留时长放宽策略,调整完成,否则,令v=1.1v,转步骤2.
4 实例验证
4.1 算例描述
为验证本文方法的有效性,在Python 3.6.2中进行数值实验分析,并使用GUROBI 9.1求解器进行模型的求解.电脑配置为Intel Core TM i7-8550U CPU 1.80 GHz 以及16.0 GB内存的Windows操作系统.
表1 行程信息
Tab.1
| 行程编号 | 目标暂存区 | 配送料包数量 | 行驶时长/min | 行程编号 | 目标暂存区 | 配送料包数量 | 行驶时长/min |
|---|---|---|---|---|---|---|---|
| 1 | 暂存区3 | 1 | 6 | 6 | 暂存区1 | 2 | 10 |
| 2 | 暂存区3 | 2 | 6 | 7 | 暂存区3、暂存区2 | 2 | 8 |
| 3 | 暂存区2 | 1 | 8 | 8 | 暂存区3、暂存区1 | 2 | 10 |
| 4 | 暂存区2 | 2 | 8 | 9 | 暂存区2、暂存区1 | 2 | 10 |
| 5 | 暂存区1 | 1 | 10 |
根据物料需求计划,民用飞机一个架次的总装需要总计812个AO料包,部分料包的信息如表2所示,包括AO料包的编号、需求时间和需要送达的目标工位.
表2 部分AO料包的物料需求计划
Tab.2
| AO编号 | 需求时间/h | 目标工位 | AO编号 | 需求时间/h | 目标工位 |
|---|---|---|---|---|---|
| 150C08RW6040 | 0 | 暂存区3 | 140C08ZF3401 | 8 | 暂存区2 |
| 150C08RW6030 | 0 | 暂存区3 | 140C08ZF3300 | 8 | 暂存区2 |
| 140C07BS0080 | 0 | 暂存区2 | 140C08ZF2500 | 8 | 暂存区2 |
| 140C05DA0030 | 0 | 暂存区2 | 140C08ZF2400 | 8 | 暂存区2 |
| 130C06KS0010 | 0 | 暂存区1 | 140C08ZF2100 | 8 | 暂存区2 |
| 130C01PJ0050 | 0 | 暂存区1 | 130C01RS0010 | 8 | 暂存区1 |
| 150C03RD0260 | 1 | 暂存区3 | 130C01KS0010 | 8 | 暂存区1 |
| 150C03JD0010 | 1 | 暂存区3 | 150C04SA0010 | 8.25 | 暂存区3 |
| 150C03DD0210 | 1 | 暂存区3 | 150C04AA0070 | 8.25 | 暂存区3 |
| 150C03DD0160 | 1 | 暂存区3 | 150C05SA0040 | 9 | 暂存区3 |
车间采取日配送的计划,即AGV提前1 d将下一工作日需要的所有AO料包从线边库配送至工位暂存区,每日所需配送AO料包数量如表3所示.
表3 每日所需配送料包数量
Tab.3
| 工作日编号 | AO料包数量 | 工作日编号 | AO料包数量 |
|---|---|---|---|
| Day1 | 59 | Day8 | 53 |
| Day2 | 76 | Day9 | 58 |
| Day3 | 59 | Day10 | 75 |
| Day4 | 55 | Day11 | 61 |
| Day5 | 73 | Day12 | 33 |
| Day6 | 62 | Day13 | 47 |
| Day7 | 65 | Day14 | 36 |
考虑到目前该型号民用客机的产量将逐年快速递增,每日所需配送的AO料包数量也会相应增加,因此本文设计了规模不等的算例,所包含的AO料包数量分别为50、100、150.各AO料包的最晚送达时间依据生产计划中各AO的开工时间生成.
4.2 求解结果分析
各规模算例的求解时长及使用的调整策略如表4所示.
表4 料包数为50、100、150的各算例求解时长和调整策略
Tab.4
| 算例编号 | 料包数 | 求解时长/s | 调整策略 | 算例编号 | 料包数 | 求解时长/s | 调整策略 |
|---|---|---|---|---|---|---|---|
| 1 | 50 | 5.30 | — | 16 | 100 | 79.17 | — |
| 2 | 50 | 18.01 | — | 17 | 100 | 60.97 | 优先级提前 |
| 3 | 50 | 23.48 | — | 18 | 100 | 31.20 | — |
| 4 | 50 | 20.55 | — | 19 | 100 | 23.75 | — |
| 5 | 50 | 11.29 | — | 20 | 100 | 34.81 | — |
| 6 | 50 | 23.55 | — | 21 | 150 | 167.17 | 料包交换 |
| 7 | 50 | 14.72 | — | 22 | 150 | 197.26 | 料包交换 |
| 8 | 50 | 20.32 | — | 23 | 150 | 215.47 | 料包交换 |
| 9 | 50 | 14.70 | — | 24 | 150 | 122.01 | 料包交换 |
| 10 | 50 | 6.71 | — | 25 | 150 | 115.22 | 料包交换 |
| 11 | 100 | 24.29 | — | 26 | 150 | 163.90 | — |
| 12 | 100 | 57.54 | — | 27 | 150 | 113.82 | 料包交换 |
| 13 | 100 | 23.01 | — | 28 | 150 | 193.61 | — |
| 14 | 100 | 34.48 | — | 29 | 150 | 95.58 | — |
| 15 | 100 | 42.00 | — | 30 | 150 | 238.81 | 料包交换 |
由表中的数据分析可得:
(1) 料包数为50、100、150的算例平均求解时长分别为15.86、41.12、162.29 s,在最大规模即料包数为150时,平均求解时长达到162.29 s,在有限时间内得到了最优解,验证了模型的正确性.
(2) 随着料包数量的增加,在料包数为150的10个算例中出现了70%的算例需要通过料包交换策略进行调整.这表明,由于料包数量的增多,更容易出现料包的最晚送达时间违背约束的情况,也更需要相应调整策略.同时,由于AGV的数量较少,大部分料包的最晚送达时间约束比较宽松,只需前两种策略即可完成调整,未出现需要预留时长放宽策略进行调整的算例.
4.3 调整策略分析
以算例17为例,进一步分析冲突消解策略的应用.表5所示为该算例的最优AGV任务分配,表中元素为对应行程及AGV所配送的AO料包编号,配送AO料包编号按行程进行组合,并根据行程开始时间的先后进行排序.
表5 算例17的最优任务分配方案
Tab.5
| 行程 编号 | AGV编号 | ||||
|---|---|---|---|---|---|
| AGV1 | AGV2 | AGV3 | AGV4 | AGV5 | |
| 行程1 | 16, 37 | 24, 28 | 14, 29 | 30, 34 | 20, 23 |
| 行程2 | 52, 64 | 45, 61 | 15, 26 | 9, 18 | 66, 73 |
| 行程3 | 42, 47 | 41, 43 | 53, 59 | 31, 36 | 19, 90 |
| 行程4 | 55, 93 | 48, 57 | 50, 58 | 51, 62 | 21, 67 |
| 行程5 | 32, 35 | 46, 56 | 25, 79 | 54, 63 | 22, 68 |
| 行程6 | 11, 12 | 6, 39 | 13, 38 | 7, 17 | 1, 2 |
| 行程7 | 49, 65 | 8, 33 | 75, 76 | 27, 69 | 100, 74 |
| 行程8 | 77, 82 | 98, 99 | 10, 40 | 89, 96 | 4, 5 |
| 行程9 | 78, 88 | 70, 72 | 94, 95 | 91, 92 | 3, 84 |
| 行程10 | 85, 86 | 71, 83 | 80, 97 | 81, 87 | 44, 60 |
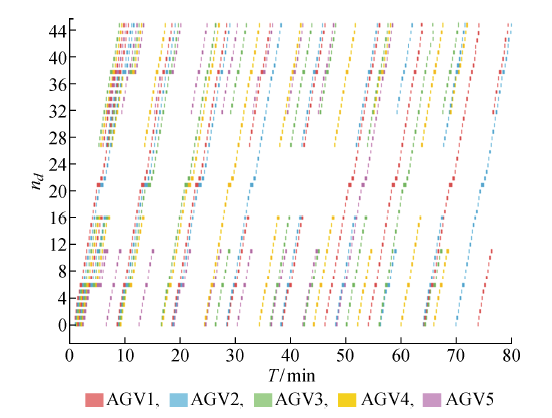
通过时间窗算法得到最优任务分配结果下各节点的时间窗如图3所示,横坐标为配送时间轴T,纵坐标为栅格地图中各个节点的编号nd,不同颜色表示不同AGV的行程,每个色块的颜色表示对应的AGV,色块的纵坐标表示AGV经过的节点编号,色块的横向长度表示该颜色对应的AGV在该趟行程中占用该节点的时间窗长度.
图3
通过两阶段算法对算例17进行求解的过程中,第27个料包、第80个料包和第94个料包发生了实际送达时间违背最晚送达时间约束的情况.在尝试料包交换策略失败后,对这些料包采用了优先级提前策略进行了调整.图4所示为AGV4的第1~7个行程,以第7个行程中的第27个料包为例,将行程7的优先级提升至行程4之前,使第27个料包的送达时间从60.4 min缩短至50.4 min,满足了最晚送达时间为60 min的约束,并且重新检验料包送达时间信息,发现行程4、行程5、行程6所有料包的实际送达时间均小于最晚送达时间,通过优先级提前策略实现了冲突消解.实验表明,本方法实现了AGV高效的任务分配以及AGV间无冲突的路径规划.
图4
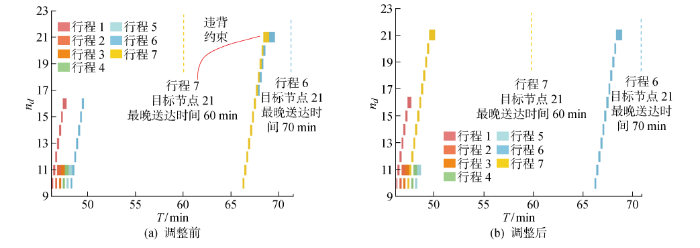
图4
调整前后行程1~7在节点10~21的时间窗规划结果
Fig.4
Time window planning results of Trips 1—7 at Nodes 10—21 before and after adjustment
5 结语
本文研究了民用客机总装车间物流配送过程中的AGV多次往返配送问题.针对多次往返以及任务分配和路径规划协同决策等复杂问题特征,提出了一种AGV任务分配与路径规划的两阶段求解方法,分解任务分配和路径规划两个子问题:第1阶段提出“行程”的概念,通过行程规划对AGV行程进行分类,大大降低了建模的复杂度,在此基础上建立了基于“行程”的任务分配模型;第2阶段设计了以行程表为输入的时间窗算法与3种冲突消解策略.数值实验表明,该方法能在有限时间内找到AGV的最优调度方案,不仅能够有效解决当前产量下总装车间AGV多次往返配送问题,同时也能适应未来飞机产量快速提升的生产物流需求.
然而,本文假设AGV的装卸货均为固定时长,考虑AGV装卸货延迟随机性的动态优化问题有助于提高AGV调度方案的稳定性以及AGV的运行效率,将是AGV调度后续值得深入研究的问题.
参考文献
A three-stage decomposition method for the joint vehicle dispatching and storage allocation problem in automated container terminals
[J].DOI:10.1016/j.cie.2019.01.023 URL [本文引用: 1]
An effective discrete artificial bee colony algorithm for multi-AGVs dispatching problem in a matrix manufacturing workshop
[J].DOI:10.1016/j.eswa.2020.113675 URL [本文引用: 1]
依订单拆分的多自动导引车物料配送路径规划
[J].
Material distribution route planning for multiple automated guided vehicles with split deliveries by order
[J].
An effective multi-objective evolutionary algorithm for solving the AGV scheduling problem with pickup and delivery
[J].DOI:10.1016/j.knosys.2021.106881 URL [本文引用: 1]
优化Dijkstra算法在工厂内物流AGV路径规划的研究
[J].
AGV path planning based on optimized Dijkstra algorithm in logistics factory
[J].
A hybrid method for assigning containers to AGVs in container terminal
[J].
Path planning with modified A star algorithm for a mobile robot
[J].
基于高适应度值遗传算法的AGV最优路径规划
[J].
AGV optimal path planning based on genetic algorithms of large fitness value
[J].
Multi-AGV scheduling for conflict-free path planning in automated container terminals
[J].DOI:10.1016/j.cie.2020.106371 URL [本文引用: 1]
改进人工势场法自主移动机器人路径规划
[J].
Autonomous mobile robot path planning based on improved artificial potential method
[J].
改进人工势场法的移动机器人路径规划
[J].
DOI:10.3778/j.issn.1002-8331.1904-0472
[本文引用: 1]

传统人工势场法在路径规划过程中易陷入势场局部最小点和陷阱区域,面对较为复杂的障碍物环绕环境也难以规划出完整路径。针对这个问题,提出了一种改进人工势场法。引入机器人前进的方向向量,对斥力的生成和计算机制进行了调整以解决其处于局部最小点情况下无法继续规划路径的问题;添加了判断机制以识别周边环境状况,当机器人处于陷阱区域等复杂环境下时设立虚拟目标点以引导其向外运动从而摆脱陷阱区域。结果表明,改进算法可以有效解决传统算法容易出现的路径规划中断情况;同时与传统算法相比,其在随机障碍物环境中的规划路径长度减少,有效提高了路径规划效率。
Mobile robots path planning based on improved artificial potential field
[J].
DOI:10.3778/j.issn.1002-8331.1904-0472
[本文引用: 1]
The traditional artificial potential field is easy to fall into the local minimum point and trap area in the path planning process, and is difficult to plan a complete path when the robot surrounded by complex obstacles. An improved artificial potential field is proposed to solve these problems. Firstly, the direction vector of the robot forward is introduced to solve the problem that the robot cannot continue to plan the path when it is at the local minimum point, the generation and the computer system of the repulsive force are also adjusted for this problem. Secondly, a judgment mechanism is added to identify the surrounding environment. When the robot in a complex environment such as the trap area, a virtual target point is set to guide the robot to move outward to get rid of this place. The results show that the improved algorithm can effectively solve the path planning interruption that is easy to occur in traditional algorithms. At the same time, compared with the traditional algorithm, the planned path length in the random obstacle environment is reduced, which effectively improves the path planning efficiency.
A novel tabu search algorithm for multi-AGV routing problem
[J].DOI:10.3390/math8020279 URL [本文引用: 1]
考虑拥堵因素的自动化码头多AGV无冲突动态路径规划模型
[J].
Multiple AGV conflict-free dynamic routing model in automated terminals considering congestion factors
[J].
基于多智能体强化学习的多AGV路径规划方法
[J].
Multi-AGV path planning method based on multi-agent reinforcement learning
[J].
Time-space network model and MILP formulation of the conflict-free routing problem of a capacitated AGV system
[J].DOI:10.1016/j.cie.2020.106270 URL [本文引用: 1]
考虑AGV避碰的自动化码头多资源协同调度
[J].
DOI:10.3778/j.issn.1002-8331.1812-0069
[本文引用: 1]
为解决自动化码头岸桥、AGV、场桥三个资源协同调度中AGV的路口碰撞问题,考虑任务分配、AGV的避碰约束,建立一个所有任务最大完工时间最小化为目标的混合整数规划模型。通过设置路口的相容和冲突相位,使处于相容相位的AGV可以同时通过。对考虑避碰规则和不考虑避碰规则的实验数组进行分析,比较其解的优劣性。实验结果表明在考虑避碰规则下的AGV能有效减少冲突次数,实现相容相位小车的避碰,使调度结果更优化,提高整个作业流程的效率。
Multi-resource coordinated scheduling of automated terminals considering AGV collision avoidance
[J].
DOI:10.3778/j.issn.1002-8331.1812-0069
[本文引用: 1]
In order to solve the collision problem of AGVs during the coordinated scheduling among three resources of quay crane, AGV and yard crane, this research considers the task allocation and AGV collision avoidance constraints, and establishes a mixed integer programming model, which aims to minimize the maximum completion time of all tasks. This research sets the compatible and conflicting phases for the intersections, and assumes the AGVs in the compatible phase can pass the intersection simultaneously. The comparison experiments with and without the collision avoidance rules are analyzed. It is verified that the proposed model which considers the collision avoidance rule can effectively reduce the number of collisions, realizes the collision avoidance of AGVs which are in compatible phases, optimizes the scheduling results, and improves the efficiency of the whole operation process.
多AGV路径规划方法研究
[J].
Research of path planning in multi-AGV system
[J].
Integrated tasks assignment and routing for the estimation of the optimal number of AGVS
[J].DOI:10.1007/s00170-015-7343-4 URL [本文引用: 1]
基于栅格地图的分层式机器人路径规划算法
[J].
DOI:10.7523/j.issn.2095-6134.2013.04.015
[本文引用: 1]
采用分层规划的思想,给出一种基于栅格地图的最优路径规划算法. 分层路径规划算法的第1层为拓扑层规划,采用Voronoi图起泡生成算法描述全局可行域的拓扑关系; 第2层采用广义水平集算法,解决拓扑层的最优路径搜索问题; 第3层为栅格层的路径再规划. 在栅格层借鉴窄带水平集的思想,通过拓宽拓扑路径,得到一个机器人安全通行的窄带区域,并在此区域实行局部快速匹配算法,改善了拓扑路径,提高了算法的效率,并提高规划的实时性.
Hierarchical robot path planning algorithm based on grid map
[J].
DOI:10.7523/j.issn.2095-6134.2013.04.015
[本文引用: 1]
Utilizing the hierarchical planning idea, we propose an optimal path planning algorithm based on grid map. The first layer of the algorithm is planning in topology layer, and we adopt Voronoi graph construction frothing algorithm to describe topological relationship of global passable regions. In the second layer, we design generalized level-set algorithm to solve the optimal path search problem in topological layer. The third layer is path replanning in grid layer. Utilizing the narrow-band level-set idea, we obtain a narrow band region that robot can safely pass by broadening the topology path in grid layer, and the local fast marching method algorithm is implemented in this region. It improves the topological path and increases the efficiency and real-time capability of the proposed algorithm.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}