Journal of Shanghai Jiao Tong University ›› 2024, Vol. 58 ›› Issue (10): 1618-1628.doi: 10.16183/j.cnki.jsjtu.2023.086
• Original article • Previous Articles Next Articles
LAI Guoliang1,2, HU Zhaozheng1,2( ), ZHOU Zhe2,3, WAN Jinjie1,2, REN Jingyuan1,2
), ZHOU Zhe2,3, WAN Jinjie1,2, REN Jingyuan1,2
Received:2023-03-09
Revised:2023-04-10
Accepted:2023-04-13
Online:2024-10-28
Published:2024-11-01
CLC Number:
LAI Guoliang, HU Zhaozheng, ZHOU Zhe, WAN Jinjie, REN Jingyuan. Simultaneous Detection and Localization for Intelligent Vehicles Based on HD Map Matching and Semantic Likelihood Model[J]. Journal of Shanghai Jiao Tong University, 2024, 58(10): 1618-1628.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2023.086

Fig.1
Flow chart of algorithm
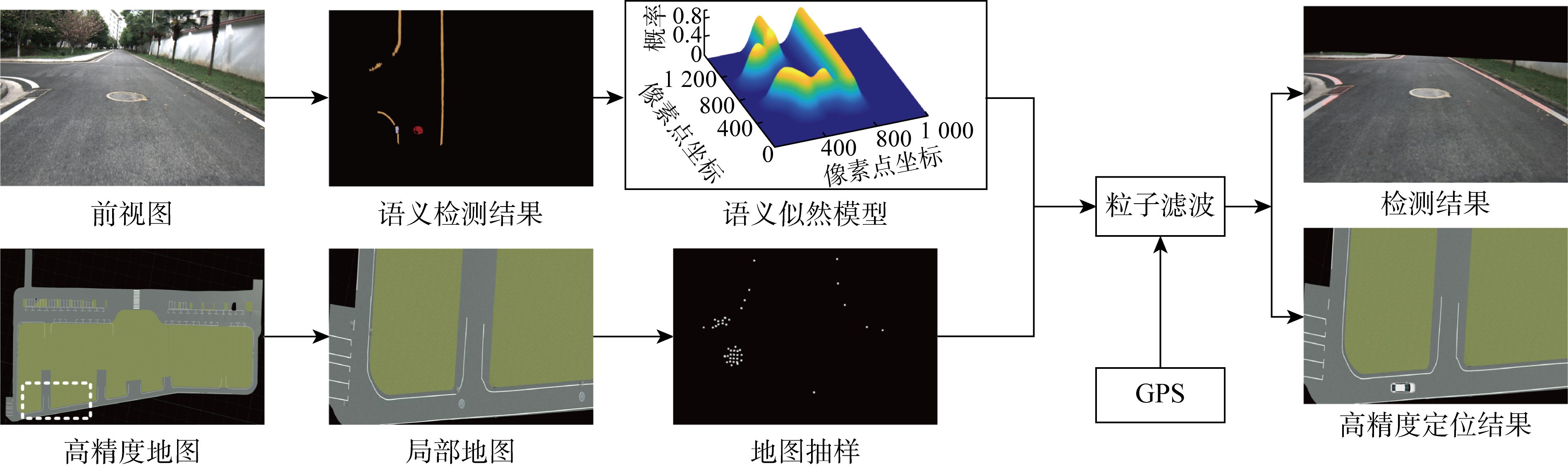
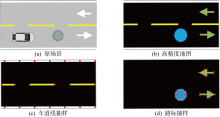
Fig.2
Representation and sampling of HD map
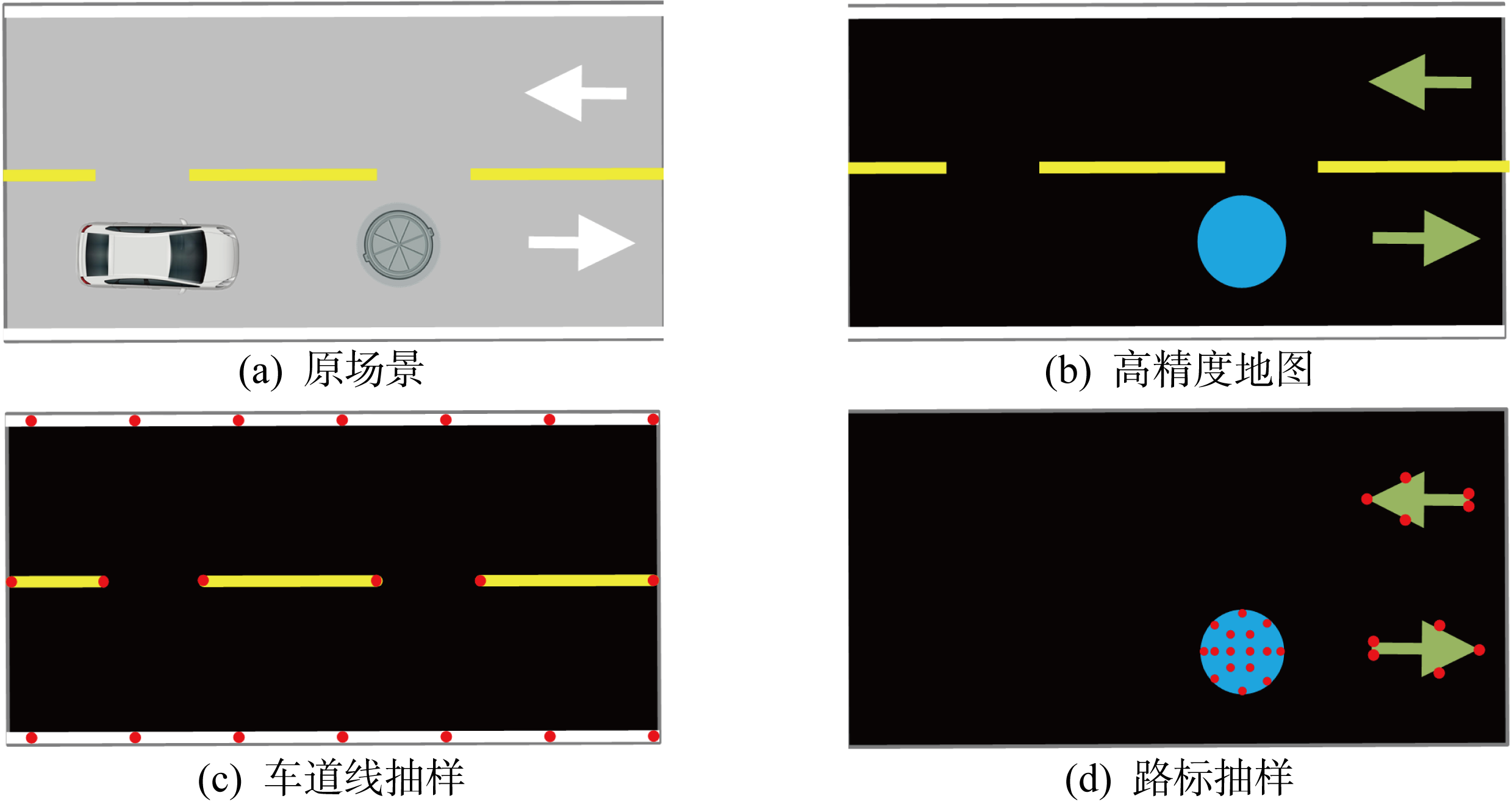
Fig.3
Coordinate system conversion between vehicle and image
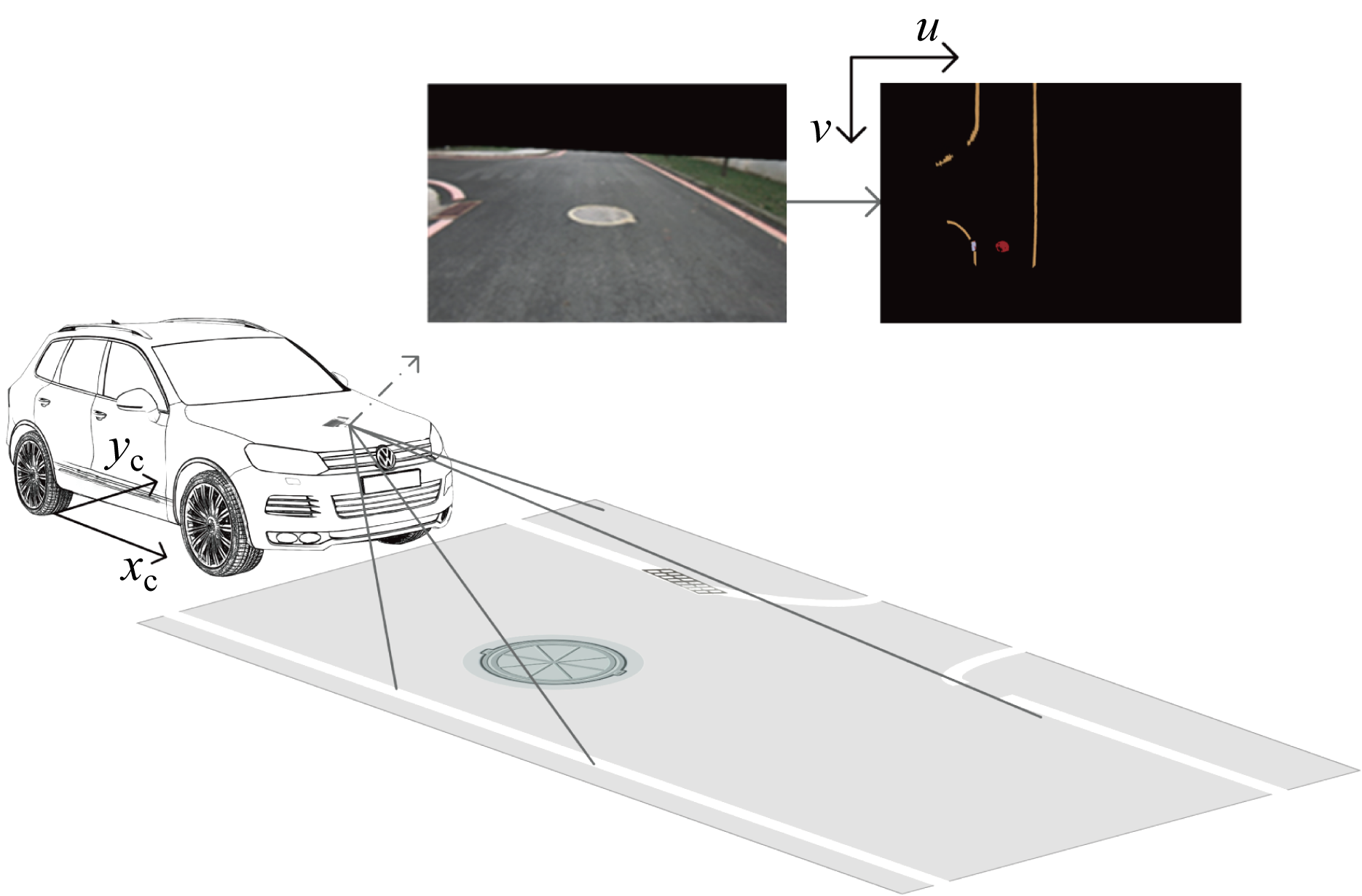
Fig.4
SLM from semantic objects
Fig.5
Distribution of semantic objects from data-set
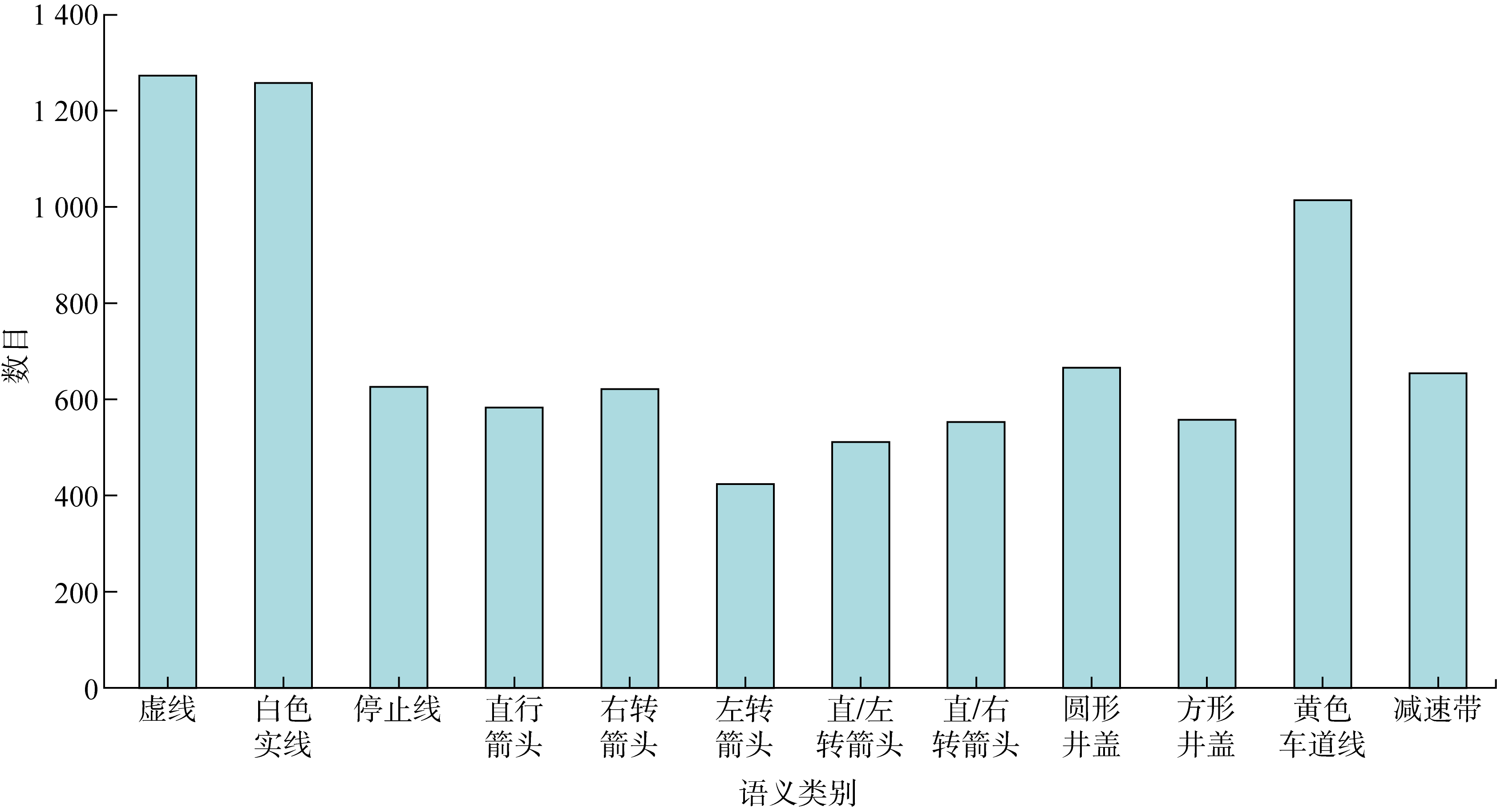
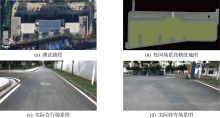
Fig.6
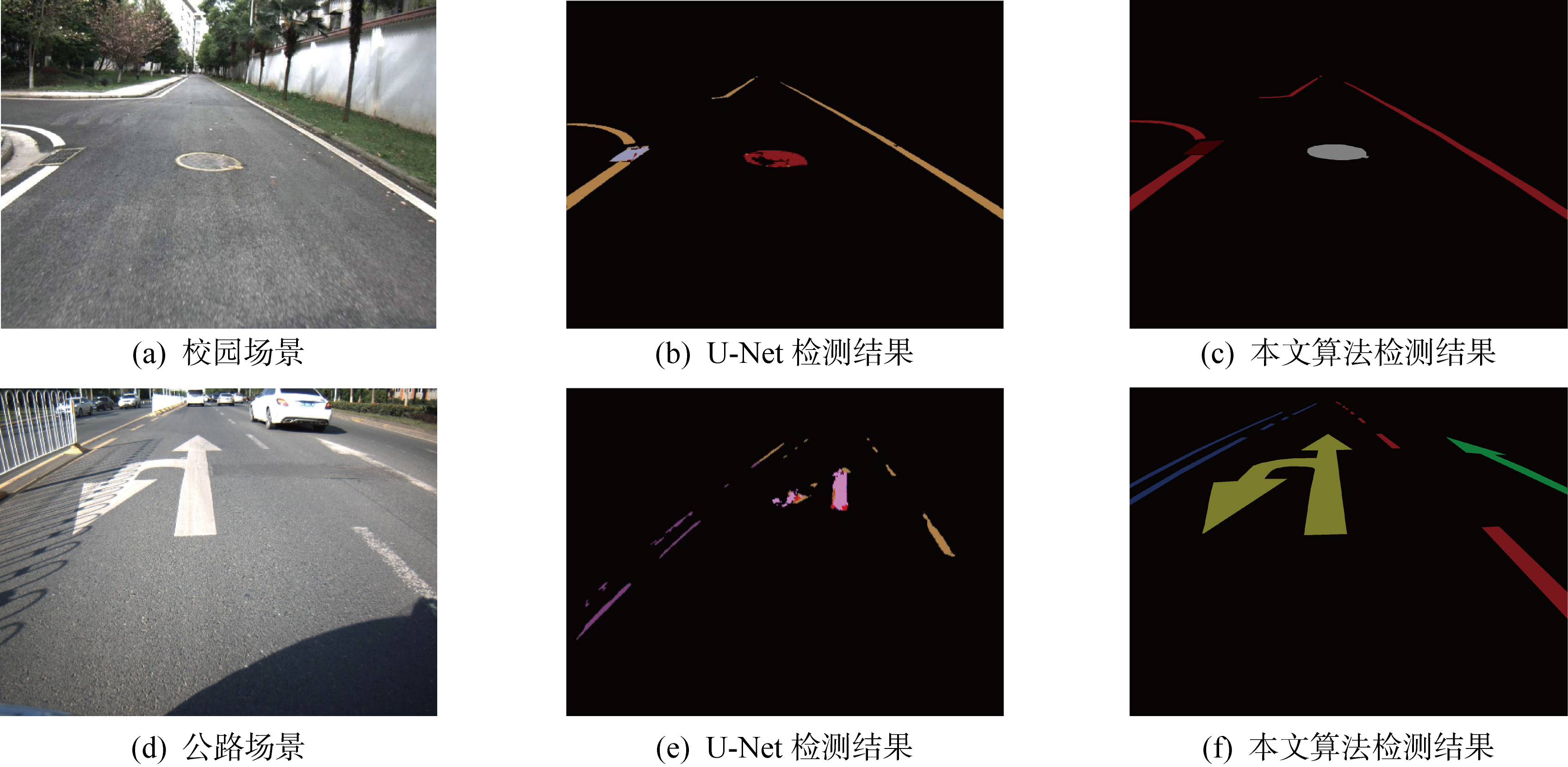
Campus scenario in the experiment
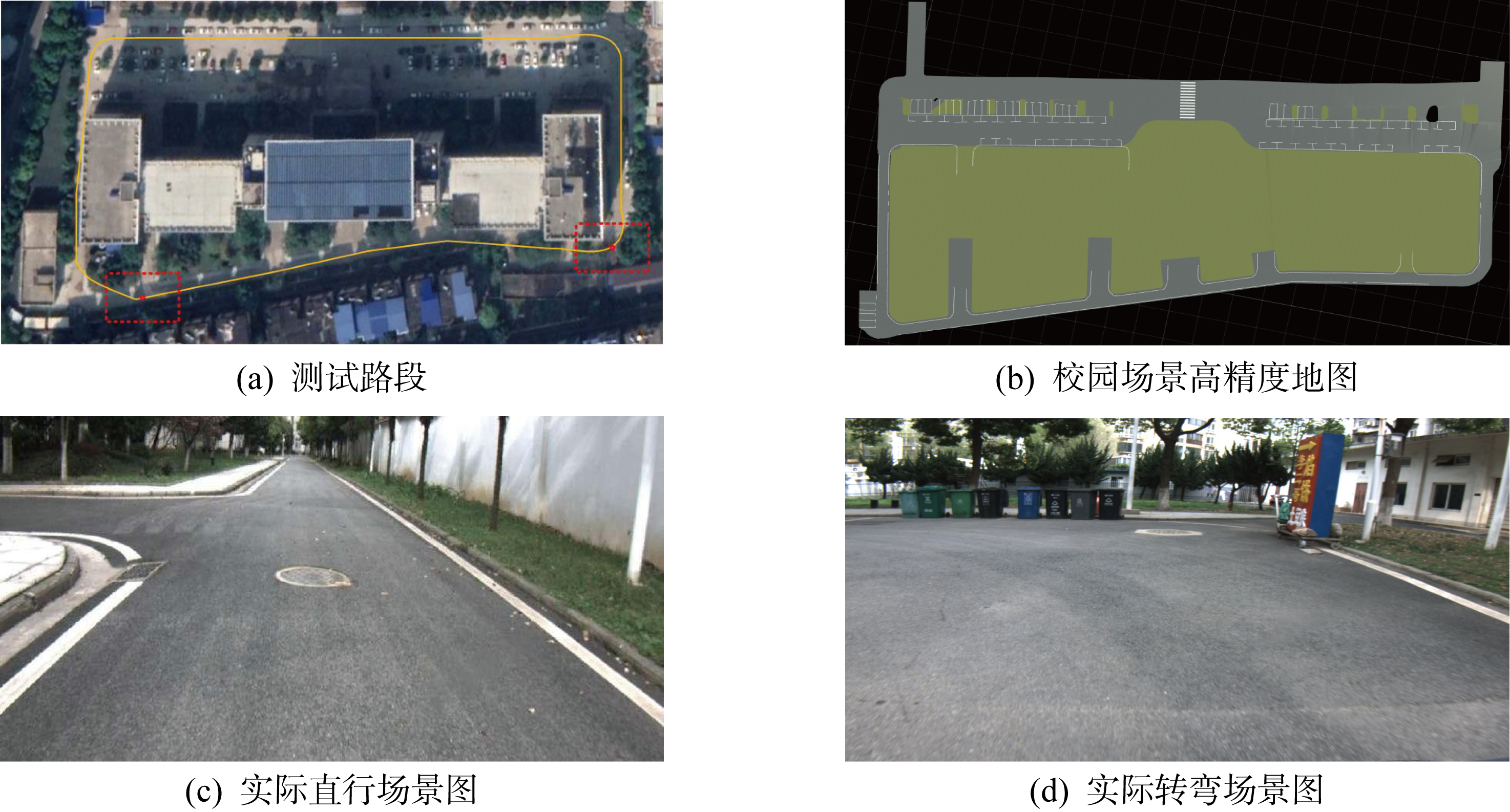

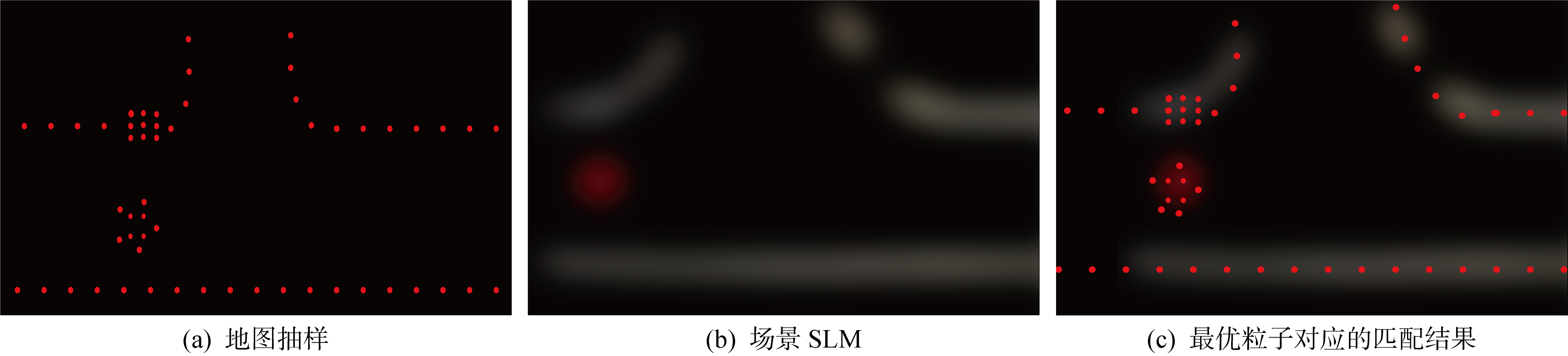
Fig.7
Matching of samples from HD map and SLM
Tab.1
Comparison of localization errors in campus scenario
| 方法 | 最小误差/cm | 最大误差/cm | 平均误差/cm |
|---|---|---|---|
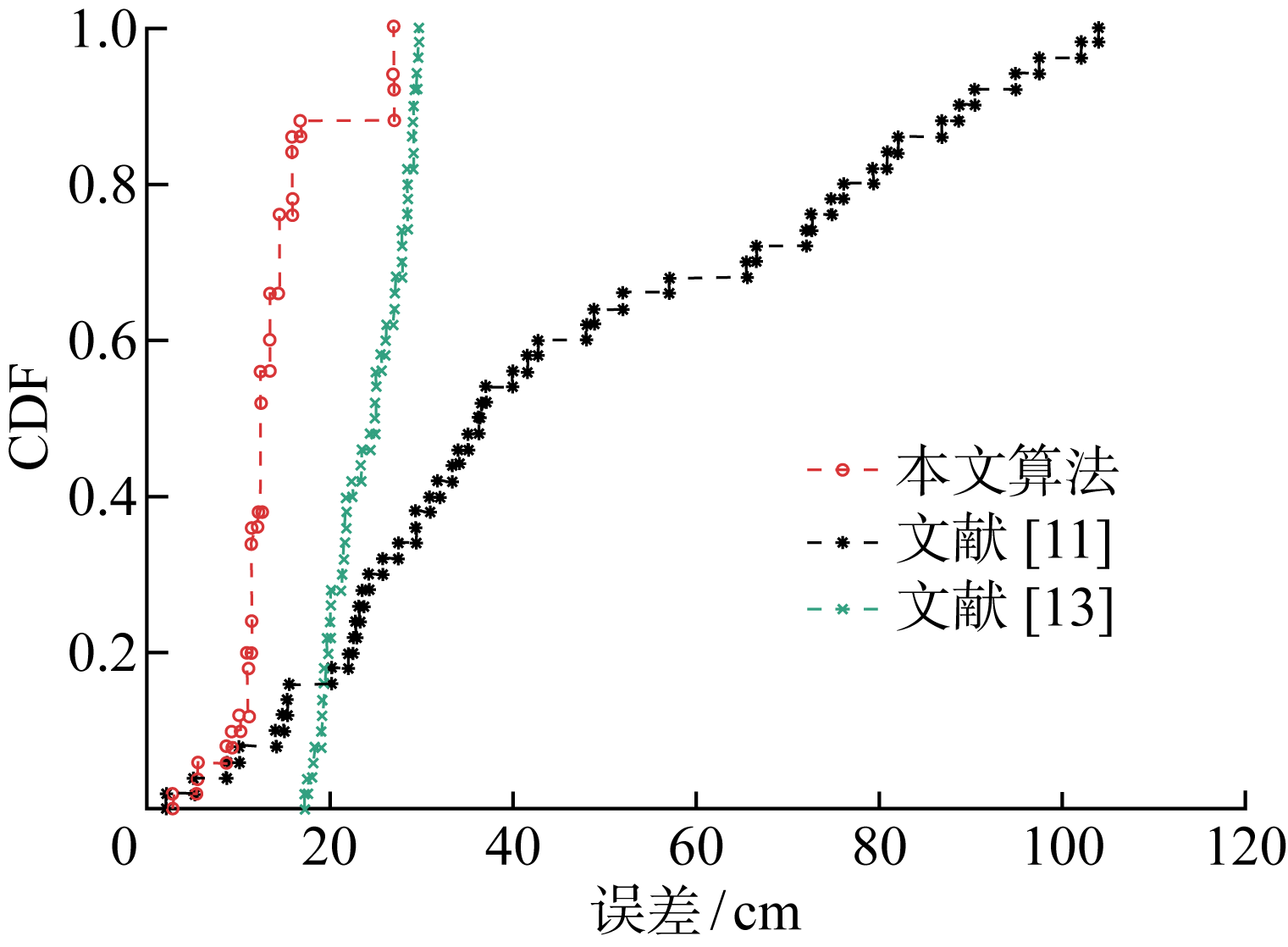
| 本文算法 | 3.4 | 49.9 | 14.4 |
| 文献[11] | 11.0 | 125.8 | 54.7 |
| 文献[13] | 11.8 | 59.5 | 30.4 |

Fig.8
CDF of localization error in campus scenario
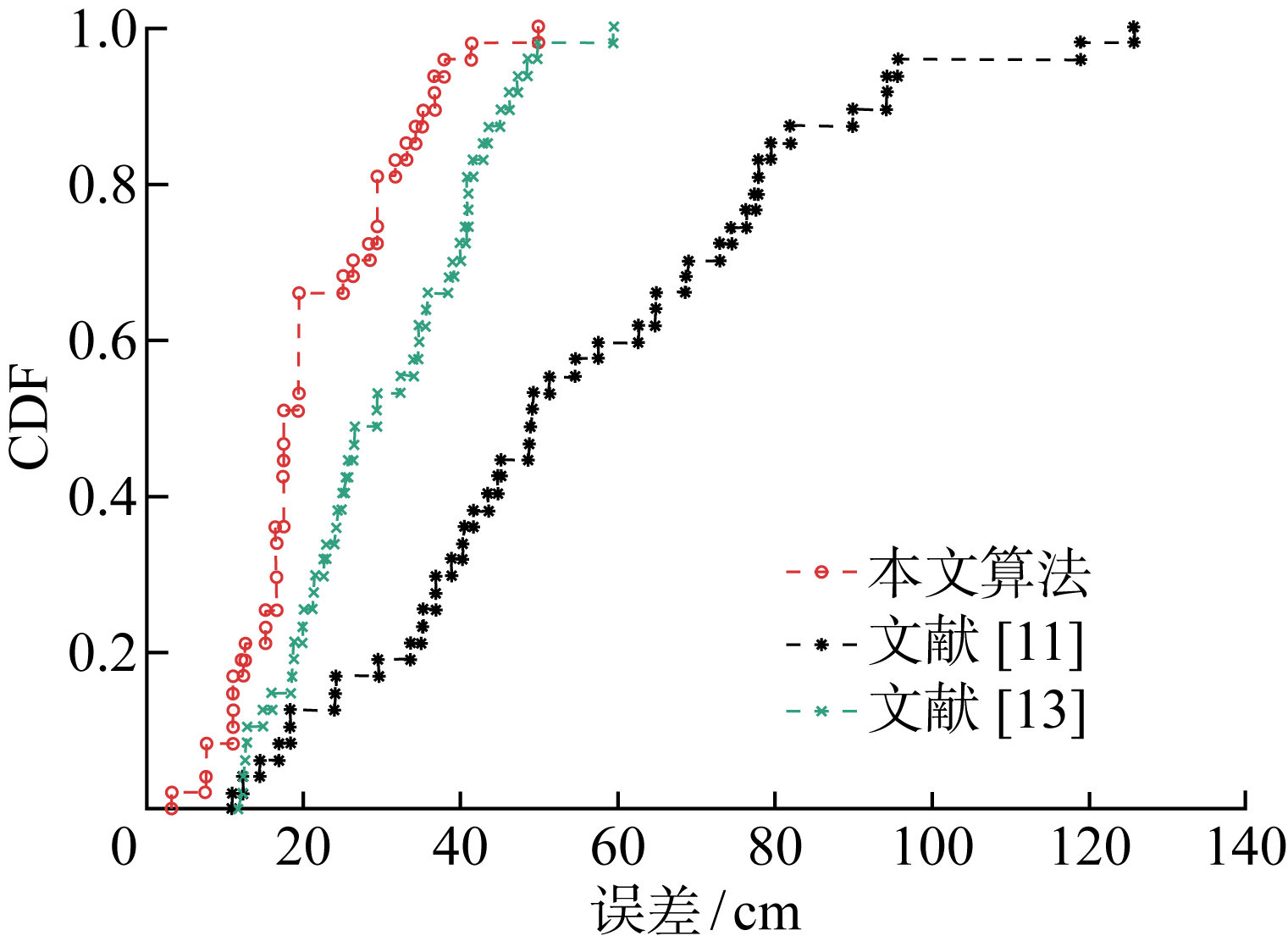
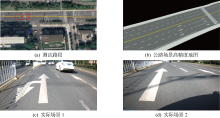
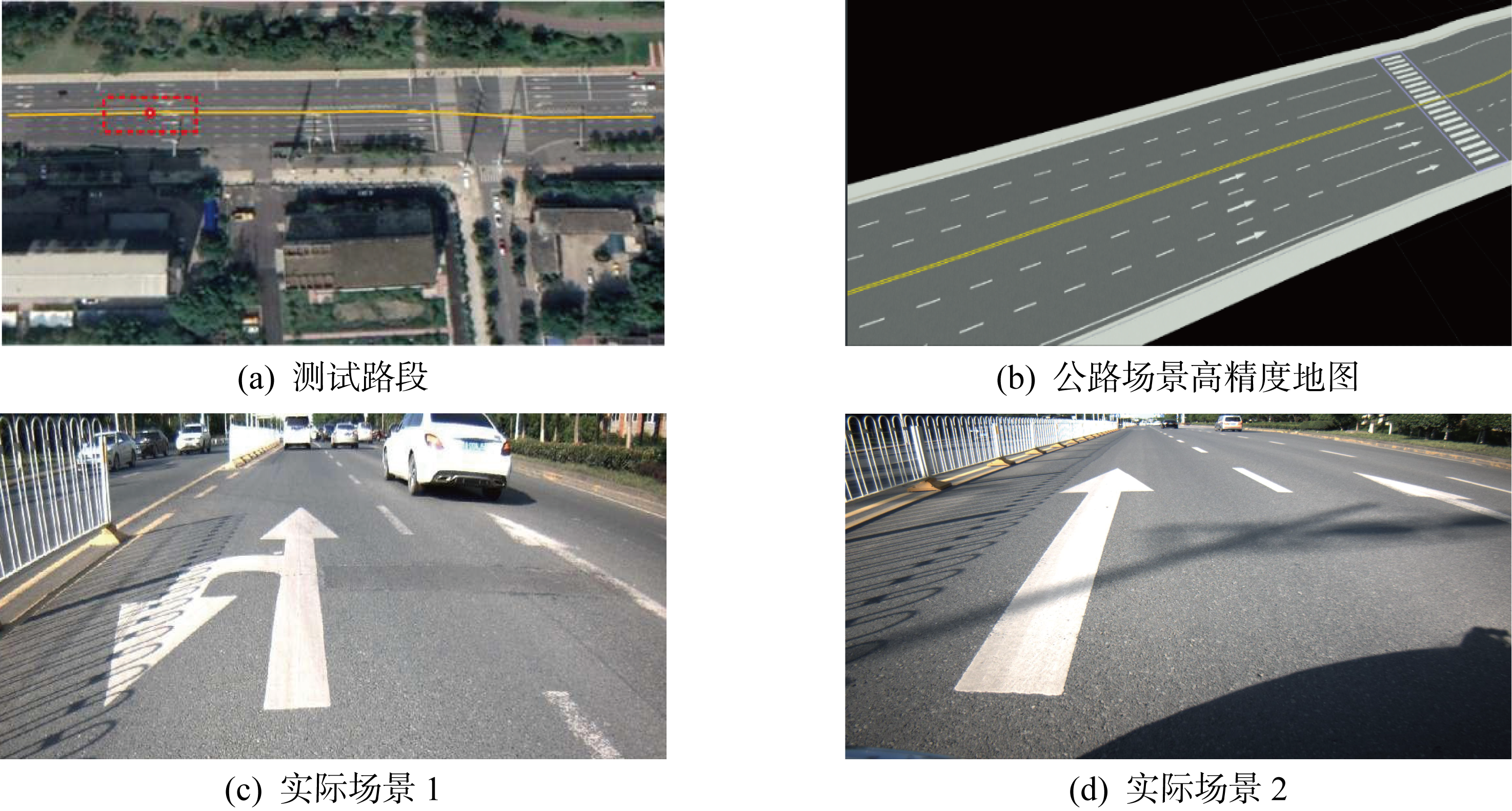
Fig.9
Test road in urban scenario
Tab.2
Comparison of localization errors in urban scenario
| 方法 | 最小误差/cm | 最大误差/cm | 平均误差/cm |
|---|---|---|---|
| 本文算法 | 2.8 | 26.9 | 14.0 |
| 文献[ | 2.2 | 103.8 | 45.9 |
| 文献[ | 17.2 | 29.8 | 24.2 |
Fig.10
CDF of localization error in urban scenario
Tab.3
IoU of detection results of different methods
| 类别 | IoU/% | |||
|---|---|---|---|---|
| 本文 方法 | Swin- Unet[ | ConvNext- Unet[ | U-Net | |
| 虚线 | 86.0 | 74.0 | 65.3 | 70.1 |
| 白色实线 | 90.6 | 65.7 | 56.3 | 78.1 |
| 停止线 | 85.7 | 69.9 | 64.8 | 62.3 |
| 直行箭头 | 87.6 | 72.6 | 71.8 | 60.2 |
| 直行或左转箭头 | 85.3 | 71.9 | 65.8 | 66.3 |
| 圆形井盖 | 81.4 | 66.9 | 60.7 | 58.7 |
| 方形井盖 | 84.3 | 71.3 | 70.1 | 58.6 |
| 黄色车道线 | 88.3 | 72.2 | 68.5 | 64.4 |
| 平均交并比 | 86.1 | 62.7 | 58.1 | 57.6 |

Fig.11
Comparison of semantic detection results
| [1] | JO H G, LEE W, KIM E. Mixture Density-PoseNet and its application to monocular camera-based global localization[J]. IEEE Transactions on Industrial Informatics, 2021, 17(1): 388-397. |
| [2] | MA Y F, WANG Z Y, YANG H, et al. Artificial intelligence applications in the development of autonomous vehicles: A survey[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(2): 315-329. |
| [3] | 中国科学技术协会. 中科协发布2020重大科学问题和工程技术难题[EB/OL]. (2020-08-16)[2023-03-09]. https://www.cast.org.cn/art/2020/8/16/art_90_130822.html. |
| China Association for Science and Technology. 2020 CAST releases 2020 major scientific and engineeringtechnical challenges[EB/OL]. (2020-08-16)[2023-03-09]. https://www.cast.org.cn/art/2020/8/16/art_90_130822.html. | |
| [4] | ZHONG H X, WANG R. A visual-degradation-inspired model with HSV color-encoding for contour detection[J]. Journal of Neuroscience Methods, 2022, 369(1): 1-12. |
| [5] | BEN C, BUSHNAG A. Color edge detection using multidirectional sobel filter and fuzzy fusion[J]. Computers, Materials & Continua, 2023, 2(2): 2839-2852. |
| [6] | NEVEN D, DE B, GEORGOULIS S, et al. Towards end-to-end lane detection: An instance segmentation approach[C]// IEEE Intelligent Vehicles Symposium (IV). Jiangsu, China: IEEE, 2018: 286-291. |
| [7] | JANG W, HYUN J, AN J, et al. A lane-level road marking map using a monocular camera[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9(1): 187-204. |
| [8] | CAMPOS C, ELVIRA R, RODRÍGUEZ J J G, et al. ORB-SLAM3: An accurate open-source library for visual, visual-inertial, and multimap SLAM[J]. IEEE Transactions on Robotics, 2021, 37(6): 1874-1890. |
| [9] | LIU R, WANG J L, ZHANG B Q. High definition map for automated driving: Overview and analysis[J]. Journal of Navigation, 2020, 73(2): 324-341. |
| [10] |
胡兵, 杨明, 郭林栋, 等. 基于地面快速鲁棒特征的智能车全局定位方法[J]. 上海交通大学学报, 2019, 53(2): 203-208.
doi: 10.16183/j.cnki.jsjtu.2019.02.011 URL |
| HU Bing, YANG Ming, GUO Lindong, et al. Global localization for intelligent vehicle using ground SURF[J]. Journal of Shanghai Jiao Tong University, 2019, 53(2): 203-208. | |
| [11] | CUI D, XUE J, ZHENG N. Real-time global localization of robotic cars in lane level via lane marking detection and shape registration[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 17(4): 1039-1050. |
| [12] | 王相龙, 胡钊政, 李祎承, 等. 基于路面指纹的高精度车辆定位[J]. 交通运输系统工程与信息, 2018, 18(4): 38-45. |
| WANG Xianglong, HU Zhaozheng, LI Yicheng, et al. High accuracy vehicle localization by referring to pavement fingerprint[J]. Journal of Transportation Systems Engineering and Information Technology, 2018, 18(4): 38-45. | |
| [13] | LIN C, LIAN F L. System integration of sensor-fusion localization tasks using vision-based driving lane detection and road-marker recognition[J]. IEEE Systems Journal, 2020, 14(3): 4523-4534. |
| [14] | XIAO Z Y, YANG D G, WEN T P, et al. Monocular localization with Vector HD Map (MLVHM): A low-cost method for commercial IVs[J]. Sensors, 2020, 20(7): 1870-1-24. |
| [15] | RONNEBERGER O, FISCHER P, BROX T. U-Net: Convolutional networks for biomedical image segmentation[C]// International Conference on Medical Image Computing and Computer-assisted Intervention. Munich, Germany: Springer, 2015: 234-241. |
| [16] | ASAM. ASAM OpenDRIVE[EB/OL]. (2020-11-14)[2023-03-09]. https://www.asam.net/standards/detail/opendrive/. |
| [17] | THRUN S. Probabilistic robotics[J]. Communications of the ACM, 2002, 45(3): 52-57. |
| [18] | 国家市场监督管理总局, 国家标准化管理委员会. 道路交通标志和标线. 第2部分:道路交通标志. GB 5768.2—2022[S]. 北京: 中国标准出版社, 2022. |
| State Administration for Market Regulation, Standardization Administration of China. Road traffic signs and markings. Part 2:Road traffic signs. GB 5768.2—2022[S]. Beijing: Standards Press of China, 2022. | |
| [19] | ZHANG Z. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334. |
| [20] | CAO H, WANG Y, CHENG J, et al. Swin-Unet: Unet-like pure transformer for medical image segmentation[C]// European Conference on Computer Vision. Cham, Switzerland: Springer Nature Switzerland, 2022: 205-218. |
| [21] | LIN S C, LEE H W, HSIEH Y H, et al. Masked attention ConvNeXt Unet with Multi-Synthesis dynamic weighting for anomaly detection and localization[C]// British Machine Vision Conference. Aberdeen, England: Machine Translation Springer, 2023: 722-735. |
| [1] | CUI Xian, CHEN Ziqiang. A Highly Robust State of Health Estimation Method for Lithium-Ion Batteries Based on ECM and SGPR [J]. Journal of Shanghai Jiao Tong University, 2024, 58(5): 747-759. |
| [2] | SUN Zhiwei, HU Xiong, DONG Kai, SUN Dejian, LIU Yang. RUL Prediction Method for Quay Crane Hoisting Gearbox Bearing Based on LSTM-CAPF Framework [J]. Journal of Shanghai Jiao Tong University, 2024, 58(3): 352-360. |
| [3] | CHEN Kun(陈坤), ZHAO Xu(赵旭), DONG Chunyu(董春玉), DI Zichao(邸子超), CHEN Zongzhi(陈宗枝). Anti-Occlusion Object Tracking Algorithm Based on Filter Prediction [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(3): 400-413. |
| [4] | HUANG He, WU Kun, LI Xinrui, WANG Jun, WANG Huifeng, RU Feng. A Multi-Feature Particle Filter Vehicle Tracking Algorithm Based on Adaptive Interpolation Moth-Flame Optimization [J]. Journal of Shanghai Jiao Tong University, 2022, 56(2): 143-155. |
| [5] | GAO Honglian, YOU Jie, CAO Songyin. In-Flight Alignment Method of Integrated SINS/GPS Navigation System Based on Combined PF-UKF Filter [J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1447-1452. |
| [6] | HOU Yuguan, HAN Yuanpeng, XIE Jinyue, MAO Xingpeng. A Radar DOA Tracking Method for Multiple Targets Based on SDE Model [J]. Air & Space Defense, 2021, 4(1): 41-46. |
| [7] | PENG Pai, CHEN Cong , YANG Yongsheng . Particle Swarm Optimization Based on Hybrid Kalman Filter and Particle Filter [J]. J Shanghai Jiaotong Univ Sci, 2020, 25(6): 681-688. |
| [8] | BI Xiaojun,HU Songyi. Firefly Algorithm with High Precision Mixed Strategy Optimized Particle Filter [J]. Journal of Shanghai Jiaotong University, 2019, 53(2): 232-238. |
| [9] | ZHANG Liang (张梁), BAO Qilian *(鲍其莲), CUI Ke (崔科), JIANG Yaodong (蒋耀东), XU Haigui (徐海贵), DU Yuding (杜雨丁). Particle Filter and Its Application in the Integrated Train Speed Measurement [J]. Journal of Shanghai Jiao Tong University (Science), 2019, 24(1): 130-136. |
| [10] | SUN Yiqi,WU Aiguo,DONG Na,SHAO Yizhe. A Novel Algorithm for Hand Tracking with Particle Filter and Improved GVF Snake [J]. Journal of Shanghai Jiaotong University, 2018, 52(7): 801-807. |
| [11] | ZHAO Guoqia,b,YANG Minga,b,WANG Binga,b,WANG Chunxiangc. Mobile Robot Seamless Localization Based on Smart Device in Indoor and Outdoor Environments [J]. Journal of Shanghai Jiaotong University, 2018, 52(1): 13-19. |
| [12] | ZHANG Tie,MA Qiongxiong. Human Object Tracking Algorithm for Human-Robot Interaction [J]. Journal of Shanghai Jiaotong University, 2015, 49(08): 1213-1219. |
| [13] | LI Xiongjie1,2,ZHOU Donghua2. Fault Diagnosis Based on Particle Filter for Hybrid System [J]. Journal of Shanghai Jiaotong University, 2015, 49(06): 849-854. |
| [14] | HOU Jing* (侯 静), JING Zhan-rong (景占荣), YANG Yan (羊 彦). Target Tracking in Standoff Jammer Using Unscented Kalman Filter and Particle Fiter with Negative Information [J]. Journal of shanghai Jiaotong University (Science), 2014, 19(2): 181-189. |
| [15] | CAO Jiea,b,LI Yuqina,WU Dib. A High Precision Particle Filter Based on Improved Differential Evolution [J]. Journal of Shanghai Jiaotong University, 2014, 48(12): 1714-1720. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||