Journal of Shanghai Jiao Tong University ›› 2022, Vol. 56 ›› Issue (10): 1379-1387.doi: 10.16183/j.cnki.jsjtu.2021.202
Special Issue: 《上海交通大学学报》2022年“机械与动力工程”专题
• Mechanical Engineering • Previous Articles Next Articles
HAN Chao1, CHEN Min1, HUANG Yuhao1, ZHAO Minghui2, DU Qiankun1, LIANG Qinhua1( )
)
Received:2021-06-11
Online:2022-10-28
Published:2022-11-03
Contact:
LIANG Qinhua
E-mail:qhliang@sjtu.edu.cn.
CLC Number:
HAN Chao, CHEN Min, HUANG Yuhao, ZHAO Minghui, DU Qiankun, LIANG Qinhua. Loop Closure Detection Method of Laser SLAM Based on Global Feature Descriptor[J]. Journal of Shanghai Jiao Tong University, 2022, 56(10): 1379-1387.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2021.202
Fig.1
Flow chart of loop closure detection algorithm flow based on global feature descriptor
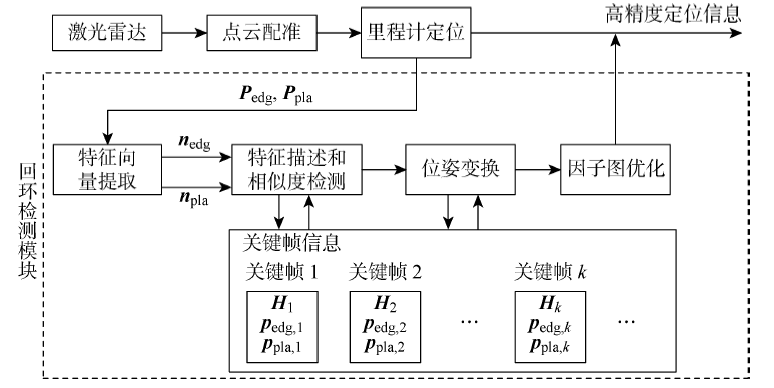

Fig.2
uvw coordinate system of global point cloud
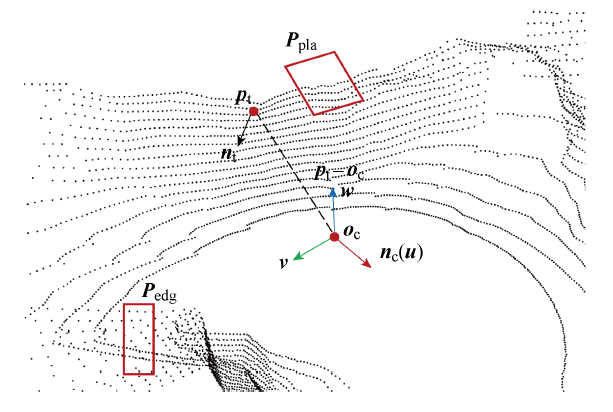
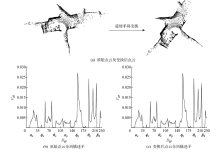
Fig.3
Experiments of rotation and translation invariance
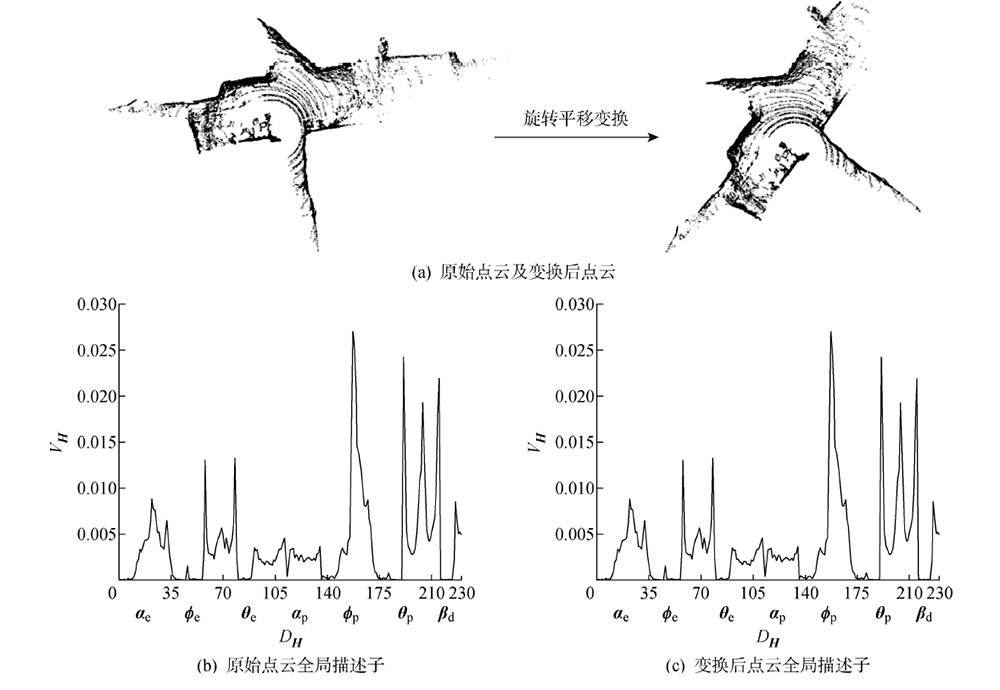
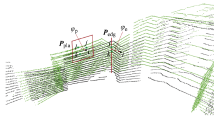
Fig.4
Registration of edge features and plane features
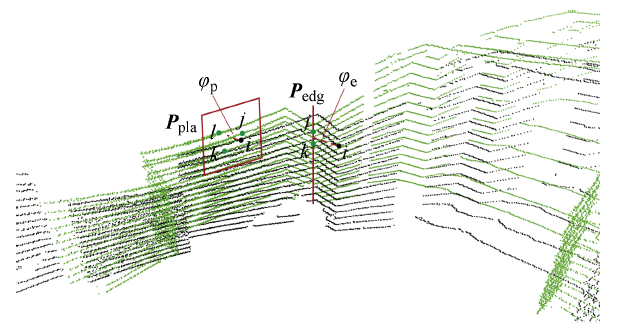

Fig.5
Model of factor graph optimization
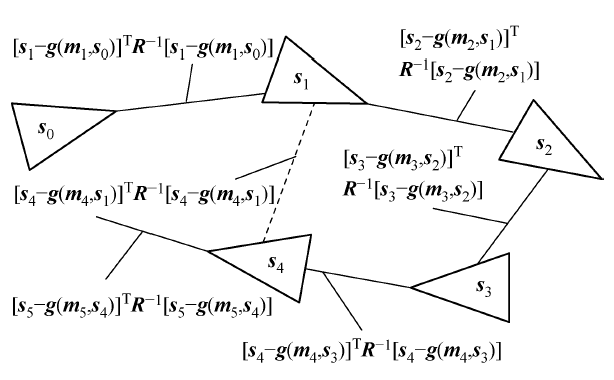
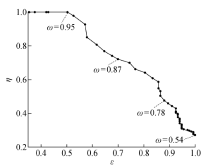
Fig.6
Curves of precision and recall rates
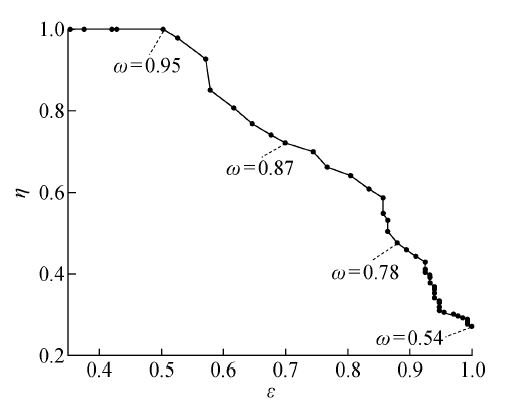

Fig.7
Environment of underground simulation experiments
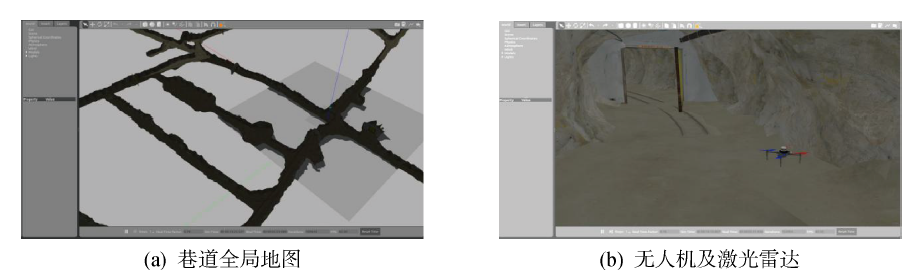
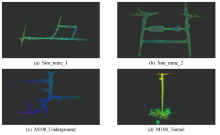
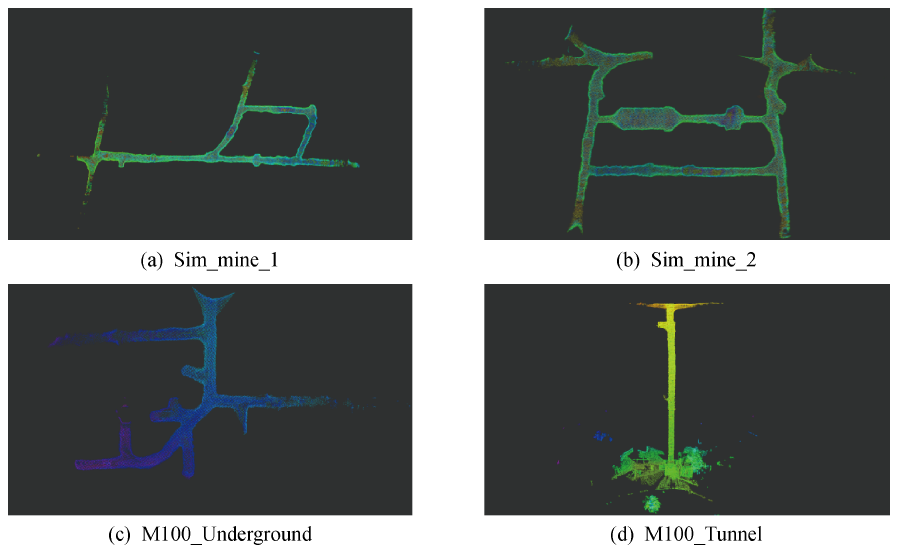
Fig.8
Point cloud maps of experiments
Tab.1
Results of localization accuracy experiments
| 序号 | 实验算法 | 最大 误差/m | 终点 误差/m | 均方根 误差/m | 巡检 距离/m |
|---|---|---|---|---|---|
| 1 | LOAM | 3.48863 | 3.45962 | 1.52933 | 618.007 |
| LOAM+ICP | 2.50563 | 0.14402 | 1.03654 | 618.007 | |
| 本文算法 | 1.46447 | 0.06376 | 0.58827 | 618.007 | |
| 2 | LOAM | 1.69615 | 1.53225 | 0.83298 | 638.446 |
| LOAM+ICP | 0.54603 | 0.02760 | 0.32963 | 638.446 | |
| 本文算法 | 0.40609 | 0.02806 | 0.17783 | 638.446 | |
| 3 | LOAM | 1.16494 | 1.15254 | 0.71497 | 264.852 |
| LOAM+ICP | 0.82921 | 0.08813 | 0.43781 | 264.852 | |
| 本文算法 | 0.47062 | 0.09923 | 0.21525 | 264.852 | |
| 4 | LOAM | 1.92765 | 0.16456 | 1.06969 | 197.782 |
| LOAM+ICP | 0.45537 | 0.04628 | 0.22482 | 197.782 | |
| 本文算法 | 0.39201 | 0.05806 | 0.15977 | 197.782 |

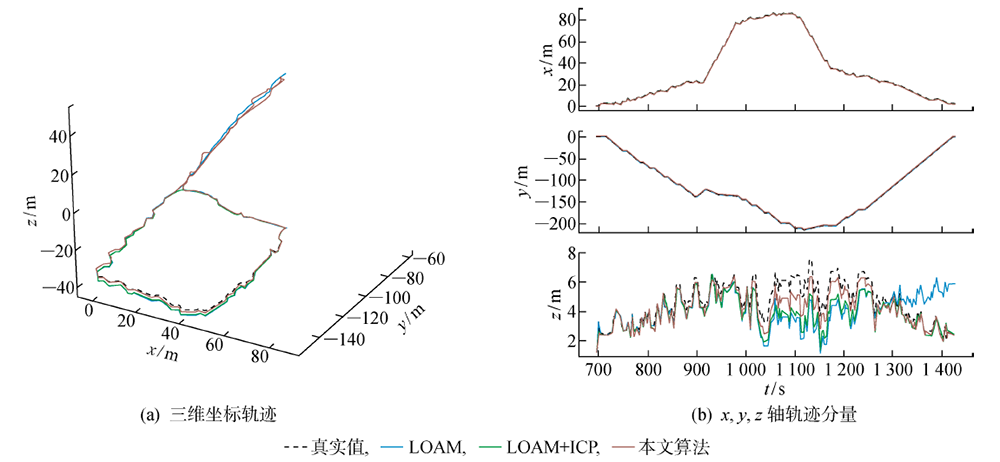
Fig.9
Trajectory of localization experiment Sim_mine_1
Tab.2
Running time of each module of proposed algorithm
| 算法 | 相似度检测 时间/ms | 位姿计算 时间/ms | 回环时间/ms |
|---|---|---|---|
| LOAM+ICP | 12.6676 | 122.3668 | 147.0491 |
| 本文算法 | 16.2595 | 67.4053 | 88.7274 |
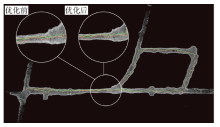
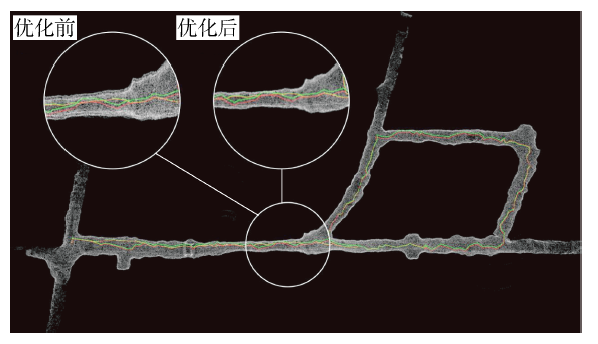
Fig.10
Localization trajectory before and after graph optimization
| [1] | 裴福俊, 李昊洋, 武玫. 基于分布式无味边缘粒子滤波的同步定位与地图构建[J]. 上海交通大学学报, 2014, 48(7): 987-992. |
| PEI Fujun, LI Haoyang, WU Mei. Distributed unscented marginalized particle filter for simultaneous localization and mapping[J]. Journal of Shanghai Jiao Tong University, 2014, 48(7): 987-992. | |
| [2] | AZHARI F, KIELY S, SENNERSTEN C, et al. A comparison of sensors for underground void mapping by unmanned aerial vehicles[C]//Proceedings of the First International Conference on Underground Mining Technology. Perth, Australia: ACG, 2017: 419-430. |
| [3] | 杨晶东, 彭坤, 顾浩楠, 等. 基于直线特征的机器人自主定位方法[J]. 上海交通大学学报, 2018, 52(9): 1120-1124. |
| YANG Jingdong, PENG Kun, GU Haonan, et al. Autonomous localisation method based on linear feature for robots[J]. Journal of Shanghai Jiao Tong University, 2018, 52(9): 1120-1124. | |
| [4] |
REN Z L, WANG L G, BI L. Robust GICP-based 3D LiDAR SLAM for underground mining environment[J]. Sensors, 2019, 19(13): 2915.
doi: 10.3390/s19132915 URL |
| [5] |
LI M G, ZHU H, YOU S Z, et al. Efficient laser-based 3D SLAM for coal mine rescue robots[J]. IEEE Access, 2019, 7: 14124-14138.
doi: 10.1109/ACCESS.2018.2889304 |
| [6] |
MUR-ARTAL R, TARDÓS J D. ORB-SLAM2: An open-source SLAM system for monocular, stereo, and RGB-D cameras[J]. IEEE Transactions on Robotics, 2017, 33(5): 1255-1262.
doi: 10.1109/TRO.2017.2705103 URL |
| [7] |
QIN T, LI P L, SHEN S J. VINS-mono: A robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018, 34(4): 1004-1020.
doi: 10.1109/TRO.2018.2853729 URL |
| [8] |
GALVEZ-LÓPEZ D, TARDOS J D. Bags of binary words for fast place recognition in image sequences[J]. IEEE Transactions on Robotics, 2012, 28(5): 1188-1197.
doi: 10.1109/TRO.2012.2197158 URL |
| [9] | SHAN T X, ENGLOT B. LeGO-LOAM: Lightweight and ground-optimized lidar odometry and mapping on variable terrain[C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid, Spain:IEEE, 2018: 4758-4765. |
| [10] | SHAN T X, ENGLOT B, MEYERS D, et al. LIO-SAM: Tightly-coupled lidar inertial odometry via smoothing and mapping[C]//2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas, NV, USA: IEEE, 2021: 5135-5142. |
| [11] | 柴梦娜, 刘元盛, 任丽军. 基于激光点云NDT特征的两步回环检测[J]. 激光与红外, 2020, 50(1): 17-24. |
| CHAI Mengna, LIU Yuansheng, REN Lijun. Two-step loop closure detection based on laser point cloud NDT features[J]. Laser & Infrared, 2020, 50(1): 17-24. | |
| [12] | 李旭. 基于多线激光雷达建图的里程计优化及回环检测[D]. 哈尔滨: 哈尔滨工业大学, 2019. |
| LI Xu. Odometry optimization and loop detection based on multi-beam LiDAR mapping[D]. Harbin:Harbin Institute of Technology, 2019. | |
| [13] | ZHANG J, SINGH S. LOAM: Lidar odometry and mapping in real-time[EB/OL]. (2014-07-16) [2021-05-18]. http://www.roboticsproceedings.org/rss10/p07.pdf. |
| [14] | LIU M, POMERLEAU F, COLAS F, et al. Normal estimation for pointcloud using GPU based sparse tensor voting[C]//2012 IEEE International Conference on Robotics and Biomimetics. Guangzhou, China: IEEE, 2012: 91-96. |
| [15] | STIGLER S M. Francis galton’s account of the invention of correlation[J]. Statistical Science, 1989, 4(2): 73-79. |
| [16] | 张小利, 李雄飞, 李军. 融合图像质量评价指标的相关性分析及性能评估[J]. 自动化学报, 2014, 40(2): 306-315. |
| ZHANG Xiaoli, LI Xiongfei, LI Jun. Validation and correlation analysis of metrics for evaluating performance of image fusion[J]. Acta Automatica Sinica, 2014, 40(2): 306-315. | |
| [17] | WEN W S, KAN Y C, HSU L T. Performance comparison of GNSS/INS integrations based on EKF and factor graph optimization[C]//Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation. Miami, Florida, USA: Institute of Navigation, 2019: 3019-3032. |
| [18] | RATZ S, DYMCZYK M, SIEGWART R, et al. OneShot global localization: Instant LiDAR-visual pose estimation[C]//2020 IEEE International Conference on Robotics and Automation. Paris, France: IEEE, 2020: 5415-5421. |
| [19] | DANG T, KHATTAK S, MASCARICH F, et al. Explore locally, plan globally: A path planning framework for autonomous robotic exploration in subterranean environments[C]//2019 19th International Conference on Advanced Robotics. Belo Horizonte, Brazil: IEEE, 2019: 9-16. |
| [1] | TONG Zhen, GONG Zheng, WANG Dongze, WANG Xinyi, XIE Ziyang. Advancing the Frontier of Single-Port Surgery: The Rise of the SHURUI Single-Port Robotic Platform (Invited) [J]. Journal of Shanghai Jiao Tong University, 2026, 60(3): 355-363. |
| [2] | QIAO Wenchao, NIE Weimin, DU Xuanmin, LIU Benqi, YE Tianming, YANG Tianlin. A Precise Control Method for Circular Motion of Unmanned Surface Vehicles for Circular Synthetic Aperture Sonar Imaging [J]. Journal of Shanghai Jiao Tong University, 2026, 60(1): 154-162. |
| [3] | DONG Dejin, WANG Changcheng, CAI Yunze. An Improved Multi-Objective Evolutionary Algorithm for Grid Map Path Planning [J]. Journal of Shanghai Jiao Tong University, 2025, 59(10): 1558-1567. |
| [4] | CAO Kai, CHEN Yangquan, LI Kang, CHEN Chaobo, YAN Kun, LIU Weichao. Dynamic Density-Guided Method for Multi-Robot Formation Transformation [J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1783-1797. |
| [5] | LAI Guoliang, HU Zhaozheng, ZHOU Zhe, WAN Jinjie, REN Jingyuan. Simultaneous Detection and Localization for Intelligent Vehicles Based on HD Map Matching and Semantic Likelihood Model [J]. Journal of Shanghai Jiao Tong University, 2024, 58(10): 1618-1628. |
| [6] | WANG Qi, LI Lüzhou, DONG Xu, YUAN Ningyi, DING Jianning. Development of a Small Jellyfish Robot with Controllable Trajectory [J]. Journal of Shanghai Jiao Tong University, 2024, 58(8): 1240-1248. |
| [7] | ZHAO Wei, YUAN Shaoke, LI Yinan, FEI Yanqiong. Design and Motion Analysis of Bionic Jaw Mechanism for Humanoid Expression Robot [J]. Journal of Shanghai Jiao Tong University, 2024, 58(8): 1231-1239. |
| [8] | LI Cuiming, WANG Hua, XU Longer, WANG Long. Road Recognition Method of Photovoltaic Plant Based on Improved DeepLabv3+ [J]. Journal of Shanghai Jiao Tong University, 2024, 58(5): 776-782. |
| [9] | LIU Wenqian, SHAN Liang, ZHANG Weilong, LIU Chenglin, MA Qiang. Unmanned Aerial Vehicle Path Planning Algorithm Based on Improved Informed RRT* in Complex Environment [J]. Journal of Shanghai Jiao Tong University, 2024, 58(4): 511-524. |
| [10] | SU Yiyi, XU Qiping, LIU Jinyang. Theoretical Modeling, Simulation Analysis, and Experimental Investigation of a Pneumatic Toothed Soft Actuator [J]. Journal of Shanghai Jiao Tong University, 2023, 57(8): 1016-1027. |
| [11] | ZHUANG Haoyu, YAN Guozheng, FEI Qian, WANG Wei, ZHAO Kai. Characteristics of a Hybrid Three-Dimensional Transmitting Coil for Wireless Power Transmission of Intestinal Robot [J]. Journal of Shanghai Jiao Tong University, 2023, 57(5): 545-551. |
| [12] | LIN Chun, HE Yuesheng, FANG Xingqi, WANG Chunxiang. A Method for Autonomous Driving Trajectory Planning in Parking Environments [J]. Journal of Shanghai Jiao Tong University, 2023, 57(3): 345-353. |
| [13] | ZHANG Wenan, GAO Weizhan, LIU Andong. Robot Skill Learning Based on Dynamic Motion Primitives and Adaptive Control [J]. Journal of Shanghai Jiao Tong University, 2023, 57(3): 354-365. |
| [14] | WANG Yuxuan, LIU Zhaoyu, WANG Jiangbei, FEI Yanqiong. Dual Modular Soft Robot with Multi-Terrain Movement Ability [J]. Journal of Shanghai Jiao Tong University, 2022, 56(10): 1388-1396. |
| [15] | HUANG Yuhao, HAN Chao, ZHAO Minghui, DU Qiankun, WANG Shigang. Multi-Objective Optimization Strategy of Trajectory Planning for Unmanned Aerial Vehicles Considering Constraints of Safe Flight Corridors [J]. Journal of Shanghai Jiao Tong University, 2022, 56(8): 1024-1033. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||